录 目 录 中文摘要 英文摘要 .. 1绪论 ..1 1.1论文选题背景及研究意义 1.1.1课题研究背景 1.1.2课题研究意义 1 1.2轮腿式机器人研究现状 .2 12.1国外研究现状… .2 1.2.2国内研究现状 9 1.2.3轮腿式机器人发展趋势 .13 13论文主要研究内容及创新点 13 1.3.1论文的主要研究内容及思路 .13 1.3.2论文的主要创新点 .16 2 Rolling-Wolf结构设计及分析 17 2.1 ROLLING-WoLF的机构设计与受力分析 .17 2.2 ROLLING-WoLF的运动学分析 23 2.3 ROLLING-WoLF的轮腿包络域分析 25 2.4 ROLLING-WOLF的结构设计 27 2.5本章小结.… 29 3 Rolling-Wolf轮腿参数多目标优化 31 3.1 ROLLING-WOLF的位姿模型 31 3.2 ROLLING-WOLF的静力学建棋 .34 33 ROLLING-WOLF运动性能评估标准的建立 37 3.4 ROLLING-WOLF多目标参数优化 39 3.4.1 Rolling Wolf多目标优化问题的数学模型概述. .39 3.4.2 Rolling Wolf多目标优化目标函数分析 40 3.4.3 Rolling Wolf多目标优化问题的设计变量分析 40 3.4.4 Rolling Wolf多目标优化问题的约束分析. 42 3.4.5 Rolling Wolf多目标优化问题的优化方法分析. .42 3.4.6 Rolling Wolf多目标优化问题的优化结果分析. .44 3.5本章小结… 48 VII
目 录 VII 目 录 中文摘要..........................................................................................................................................I 英文摘要.......................................................................................................................................III 1 绪 论.........................................................................................................................................1 1.1 论文选题背景及研究意义 .......................................................................................................1 1.1.1 课题研究背景....................................................................................................................1 1.1.2 课题研究意义....................................................................................................................1 1.2 轮腿式机器人研究现状 ...........................................................................................................2 1.2.1 国外研究现状....................................................................................................................2 1.2.2 国内研究现状....................................................................................................................9 1.2.3 轮腿式机器人发展趋势 ..................................................................................................13 1.3 论文主要研究内容及创新点 .................................................................................................13 1.3.1 论文的主要研究内容及思路 ..........................................................................................13 1.3.2 论文的主要创新点..........................................................................................................16 2 Rolling-Wolf 结构设计及分析....................................................................................17 2.1 ROLLING-WOLF 的机构设计与受力分析..............................................................................17 2.2 ROLLING-WOLF 的运动学分析..............................................................................................23 2.3 ROLLING-WOLF 的轮腿包络域分析......................................................................................25 2.4 ROLLING-WOLF 的结构设计..................................................................................................27 2.5 本章小结 .................................................................................................................................29 3 Rolling-Wolf 轮腿参数多目标优化..........................................................................31 3.1 ROLLING-WOLF 的位姿模型..................................................................................................31 3.2 ROLLING-WOLF 的静力学建模..............................................................................................34 3.3 ROLLING-WOLF 运动性能评估标准的建立..........................................................................37 3.4 ROLLING-WOLF 多目标参数优化..........................................................................................39 3.4.1 Rolling Wolf 多目标优化问题的数学模型概述..............................................................39 3.4.2 Rolling Wolf 多目标优化目标函数分析..........................................................................40 3.4.3 Rolling Wolf 多目标优化问题的设计变量分析..............................................................40 3.4.4 Rolling Wolf 多目标优化问题的约束分析......................................................................42 3.4.5 Rolling Wolf 多目标优化问题的优化方法分析..............................................................42 3.4.6 Rolling Wolf 多目标优化问题的优化结果分析..............................................................44 3.5 本章小结 .................................................................................................................................48

重庆大学硕士学位论文 4 Rolling-Wolf动力学建模及仿真 49 4.1 ROLLING-WOLF动力学建模 49 4.1.1动力学理论方法概述 49 4.1.2 Rolling-Wolf动力学建模.… g 4.2基于ADAMS的ROLLING-WOLF动力学仿真分析 51 4.2.1基于ADAMS的Rolling-.Wolf动力学建模 51 4.2.2 Rolling-Wolf动力学仿真 52 4.2.3 Rolling-Wolf减震系统仿真分析 54 4.3本章小结 57 5 Rolling-Wolf控制系统设计 59 5.1 ROLLING-WOLF控制模式设计 59 5.2 ROLLING-WOLF控制方案设计 60 5.3 ROLLING-WoLF控制系统硬件设计 60 5.3.1分层模块化控制思想 % 5.3.2硬件选型 61 5.3.3 Rolling-Wolf硬件结构设计 62 5.4 ROLLING-WoLF软件系统设计 63 5.5 ROLLING-WOLF姿态自适应控制算法设计 64 5.6 ROLLING-WOLF任务调度器设计 66 5.7 ROLLING-WOLF系统实验测试 67 5.8本章小结 71 6结论与展望 73 6.1全文总结 73 6.2未来工作展望 74 致 谢 75 参考文献 77 附 录:A.作者在攻读学位期间发表的论文目录 83 B.作者在攻读学位期间取得的科研成果目录 83 VIl
重庆大学硕士学位论文 VIII 4 Rolling-Wolf 动力学建模及仿真............................................................................... 49 4.1 ROLLING-WOLF 动力学建模 ................................................................................................. 49 4.1.1 动力学理论方法概述...................................................................................................... 49 4.1.2Rolling-Wolf 动力学建模.................................................................................................. 49 4.2 基于 ADAMS 的 ROLLING-WOLF 动力学仿真分析........................................................... 51 4.2.1 基于 ADAMS 的 Rolling-Wolf 动力学建模 .................................................................. 51 4.2.2 Rolling-Wolf 动力学仿真................................................................................................. 52 4.2.3 Rolling-Wolf 减震系统仿真分析..................................................................................... 54 4.3 本章小结.................................................................................................................................. 57 5 Rolling-Wolf 控制系统设计......................................................................................... 59 5.1 ROLLING-WOLF 控制模式设计 ............................................................................................. 59 5.2 ROLLING-WOLF 控制方案设计 ............................................................................................. 60 5.3 ROLLING-WOLF 控制系统硬件设计 ..................................................................................... 60 5.3.1 分层模块化控制思想....................................................................................................... 60 5.3.2 硬件选型........................................................................................................................... 61 5.3.3 Rolling-Wolf 硬件结构设计............................................................................................. 62 5.4 ROLLING-WOLF 软件系统设计 ............................................................................................. 63 5.5 ROLLING-WOLF 姿态自适应控制算法设计 ......................................................................... 64 5.6 ROLLING-WOLF 任务调度器设计 ......................................................................................... 66 5.7 ROLLING-WOLF 系统实验测试 ............................................................................................. 67 5.8 本章小结................................................................................................................................. 71 6 结论与展望............................................................................................................................ 73 6.1 全文总结................................................................................................................................. 73 6.2 未来工作展望......................................................................................................................... 74 致 谢 ...................................................................................................................................... 75 参考文献...................................................................................................................................... 77 附 录:A. 作者在攻读学位期间发表的论文目录 ........................................................... 83 B. 作者在攻读学位期间取得的科研成果目录.................................................... 83
1绪论 1绪论 1.1论文选题背景及研究意义 1.1.1课题研究背景 高性能移动机器人是指能够通过内部、外部传感器反馈信息感知环境及自身状 态,具备多种运动模式(如滚动、行走、奔跑、跳跃等),能适应各种结构及非结构 化环境的自主移动机器人。它集成了机构学、计算机技术、自动控制理论、信息 技术以及人工智能等领域内容,是多类学科高新技术的结晶川。可广泛用于行星探 测、军事侦察、矿山开采、反恐排雷等非结构化环境中,能有效减轻人类工作强 度、保护人生安全以及完成人类难以完成的工作,有着巨大的经济效益和社会效 益2。 移动机器人移动系统可分为轮式、腿式、履带式以及混合式四类。轮腿式移动 机器人属于典型的混合式移动机器人,该类型机器人不仅具备腿式机器人的高越 障性能和对复杂地形的高适应性能,还兼备轮式机器人在平整地面上滚动的高速 高效性能。因此,被认为是下一代最有发展潜力的高性能移动机器人。 目前国内外大多数轮腿式机器人都采用在关节处直接施加驱动电机来驱动轮 腿的运动,如日本千叶理工学院的HallucⅡ、JPL的Go-For机器人、日本Tohoku 大学的ChariotⅡ、NASA的ATHLETE robot、瑞士联邦工学院(EPFL)的Octopus、 大连理工大学的新型轮腿式机器人、赫尔辛基大学的WorkPartner等,此类轮腿式 机器人载荷主要集中在各关节处,存在结构稳定性差、承载能力小等不足。虽然 国内外研究者针对此类问题己经提出了多种不同解决方案,设计出了如Hyos、 ALDURO、PAW Robot、LegVan、HyTRo-I、NOROS-IⅡ等采用电动推杆、液压缸 以及多杆机构来驱动轮腿运动的轮腿式机器人,但这些结构在减轻关节应力、增 强机构稳定性的同时,增加了其控制复杂程度甚至其运动性能也受到较大的影响。 因此,至今轮腿式移动机器人悬架仍然没有一套被广泛认可的方案,其移动机构 和传动系统仍需要做进一步探索和研究的。 1.1.2课题研究意义 目前,轮腿式移动机器人除了在结构稳定性、承载能力等方面存在不足外, 现有轮腿机构也大多只是几种基本移动机构的简单叠加,只是在不同地质地形条 件下选用相适应的移动方式。功能层面上,有的实现了多种移动方式的融合,可 以同时以几种方式移动,但是结构上,大多混合式移动机构的几种子机构并没有 融合为一体,为了实现不同移动方式一般还需附加专门的辅助机构来进行结构转 换,如国外的Roller--Walker、Halluc-I、以及我国的HyTRo-I、HIT-HYBTOR等
1 绪 论 1 1 绪 论 1.1 论文选题背景及研究意义 1.1.1 课题研究背景 高性能移动机器人是指能够通过内部、外部传感器反馈信息感知环境及自身状 态,具备多种运动模式(如滚动、行走、奔跑、跳跃等),能适应各种结构及非结构 化环境的自主移动机器人。它集成了机构学、计算机技术、自动控制理论、信息 技术以及人工智能等领域内容,是多类学科高新技术的结晶[1]。可广泛用于行星探 测、军事侦察、矿山开采、反恐排雷等非结构化环境中,能有效减轻人类工作强 度、保护人生安全以及完成人类难以完成的工作,有着巨大的经济效益和社会效 益[2]。 移动机器人移动系统可分为轮式、腿式、履带式以及混合式四类。轮腿式移动 机器人属于典型的混合式移动机器人,该类型机器人不仅具备腿式机器人的高越 障性能和对复杂地形的高适应性能,还兼备轮式机器人在平整地面上滚动的高速 高效性能[3]。因此,被认为是下一代最有发展潜力的高性能移动机器人[4]。 目前国内外大多数轮腿式机器人都采用在关节处直接施加驱动电机来驱动轮 腿的运动,如日本千叶理工学院的 Halluc II、JPL 的 Go-For 机器人、日本 Tohoku 大学的 Chariot II、NASA 的 ATHLETE robot、瑞士联邦工学院(EPFL) 的 Octopus、 大连理工大学的新型轮腿式机器人、赫尔辛基大学的 WorkPartner 等,此类轮腿式 机器人载荷主要集中在各关节处,存在结构稳定性差、承载能力小等不足。虽然 国内外研究者针对此类问题已经提出了多种不同解决方案,设计出了如 Hylos、 ALDURO、PAW Robot、LegVan、HyTRo-I、NOROS-II 等采用电动推杆、液压缸 以及多杆机构来驱动轮腿运动的轮腿式机器人,但这些结构在减轻关节应力、增 强机构稳定性的同时,增加了其控制复杂程度甚至其运动性能也受到较大的影响。 因此,至今轮腿式移动机器人悬架仍然没有一套被广泛认可的方案,其移动机构 和传动系统仍需要做进一步探索和研究[5]。 1.1.2 课题研究意义 目前,轮腿式移动机器人除了在结构稳定性、承载能力等方面存在不足外, 现有轮腿机构也大多只是几种基本移动机构的简单叠加,只是在不同地质地形条 件下选用相适应的移动方式。功能层面上,有的实现了多种移动方式的融合,可 以同时以几种方式移动,但是结构上,大多混合式移动机构的几种子机构并没有 融合为一体,为了实现不同移动方式一般还需附加专门的辅助机构来进行结构转 换[6],如国外的 Roller-Walker、Halluc-II、以及我国的 HyTRo-I、HIT-HYBTOR 等
重庆大学硕士学位论文 此类轮腿式机器人机械结构复杂,控制系统设计难度大。因此,轮腿式机器人在 机械结构以及控制系统设计上还需要进一步研究。 本论文的研究工作就是针对以往轮腿式机器人轮腿结构在载荷分布、承载能 力、稳定性、减震性等方面的不足,提出一种新型的轮腿机构,以改善轮腿式机 器人轮腿受力状况,提高系统的承载能力和稳定性。所设计的机构需具有轮式、 腿式和轮腿式三种运动方式,具备利用一套机构无需任何附加转换装置就实现多 重模式间灵活转换的能力。 论文将要对所设计的轮腿机构的结构特点和原理进行分析,利用力学原理和 数学工具建立其运动学模型、动力学模型、位姿模型、静力学模型等,充分利用 现代优化设计方法,采用Isight优化软件中的AMGA多目标遗传算法联合 MATLAB软件,基于所建立的数学模型对所设计的轮腿结构各主要参数进行多目 标优化,使得所设计的轮腿式机器人在运动学以及力学上达到最优。然后,采用 虚拟样机技术对设计方案进行仿真验证,求解所设计的轮腿式机器人的功率特性、 减震特性等,并与其它结构进行对比,验证轮腿结构设计的合理性和优越性。此 外,论文也将对所设计轮腿式机器人的控制系统展开研究,设计轮腿式机器人姿 态自适应控制算法,并对所设计的轮腿式机器人机械结构及控制系统进行综合的 实验测试。论文所设计的轮腿机构可以作为各种高机动移动机器人、无人战车, 以及行星探测车等平台的移动机构,所使用的优化方法、计算的仿真结果、设计 的控制系统以及姿态自适应算法对高性能移动机器人开发具有一定的参考价值。 1.2轮腿式机器人研究现状 1.2.1国外研究现状 国外对野外探测移动机器的实验研究开始于上世纪60年代。如今,研发具备 越障能力强、承载能力大、机动灵活、结构紧凑等特征的智能化装备,己成为各 国展示其科研实力、增强其科学技术力量、赢得新一轮科学技术主导权的重要发 展目标7-9。 ①国外轮式被动悬架移动机器人发展概况 轮式被动悬架移动机器人是指探测机器人在保持车身平稳性时,车轮悬架采 用被动适应各种不同地形的方式,其悬架本身没有驱动,但有一定的自由度,悬 架姿态可随地形的变化而被动的变化。该类型轮式机器人结构和控制相对简单, 行驶效率较高。目前由于主动重构式悬架的轮腿式探测机器人技术至今不够成熟, 因此,实际应用于行星探测或野外考察的智能探测车多为轮式被动悬架10) 国外对被动悬架移动机器人研究己经有很长的历史,典型的有下几种: Lunakhod-1作为航天史上第一辆登陆月球的行星探测,由前苏联在1970年11 2
重庆大学硕士学位论文 2 此类轮腿式机器人机械结构复杂,控制系统设计难度大。因此,轮腿式机器人在 机械结构以及控制系统设计上还需要进一步研究。 本论文的研究工作就是针对以往轮腿式机器人轮腿结构在载荷分布、承载能 力、稳定性、减震性等方面的不足,提出一种新型的轮腿机构,以改善轮腿式机 器人轮腿受力状况,提高系统的承载能力和稳定性。所设计的机构需具有轮式、 腿式和轮腿式三种运动方式,具备利用一套机构无需任何附加转换装置就实现多 重模式间灵活转换的能力。 论文将要对所设计的轮腿机构的结构特点和原理进行分析,利用力学原理和 数学工具建立其运动学模型、动力学模型、位姿模型、静力学模型等,充分利用 现代优化设计方法,采用 Isight 优化软件中的 AMGA 多目标遗传算法联合 MATLAB 软件,基于所建立的数学模型对所设计的轮腿结构各主要参数进行多目 标优化,使得所设计的轮腿式机器人在运动学以及力学上达到最优。然后,采用 虚拟样机技术对设计方案进行仿真验证,求解所设计的轮腿式机器人的功率特性、 减震特性等,并与其它结构进行对比,验证轮腿结构设计的合理性和优越性。此 外,论文也将对所设计轮腿式机器人的控制系统展开研究,设计轮腿式机器人姿 态自适应控制算法,并对所设计的轮腿式机器人机械结构及控制系统进行综合的 实验测试。论文所设计的轮腿机构可以作为各种高机动移动机器人、无人战车, 以及行星探测车等平台的移动机构,所使用的优化方法、计算的仿真结果、设计 的控制系统以及姿态自适应算法对高性能移动机器人开发具有一定的参考价值。 1.2 轮腿式机器人研究现状 1.2.1 国外研究现状 国外对野外探测移动机器的实验研究开始于上世纪 60 年代。如今,研发具备 越障能力强、承载能力大、机动灵活、结构紧凑等特征的智能化装备,已成为各 国展示其科研实力、增强其科学技术力量、赢得新一轮科学技术主导权的重要发 展目标[7-9]。 ①国外轮式被动悬架移动机器人发展概况 轮式被动悬架移动机器人是指探测机器人在保持车身平稳性时,车轮悬架采 用被动适应各种不同地形的方式,其悬架本身没有驱动,但有一定的自由度,悬 架姿态可随地形的变化而被动的变化。该类型轮式机器人结构和控制相对简单, 行驶效率较高。目前由于主动重构式悬架的轮腿式探测机器人技术至今不够成熟, 因此,实际应用于行星探测或野外考察的智能探测车多为轮式被动悬架[7-10]。 国外对被动悬架移动机器人研究已经有很长的历史,典型的有下几种: Lunakhod -1 作为航天史上第一辆登陆月球的行星探测,由前苏联在 1970 年 11
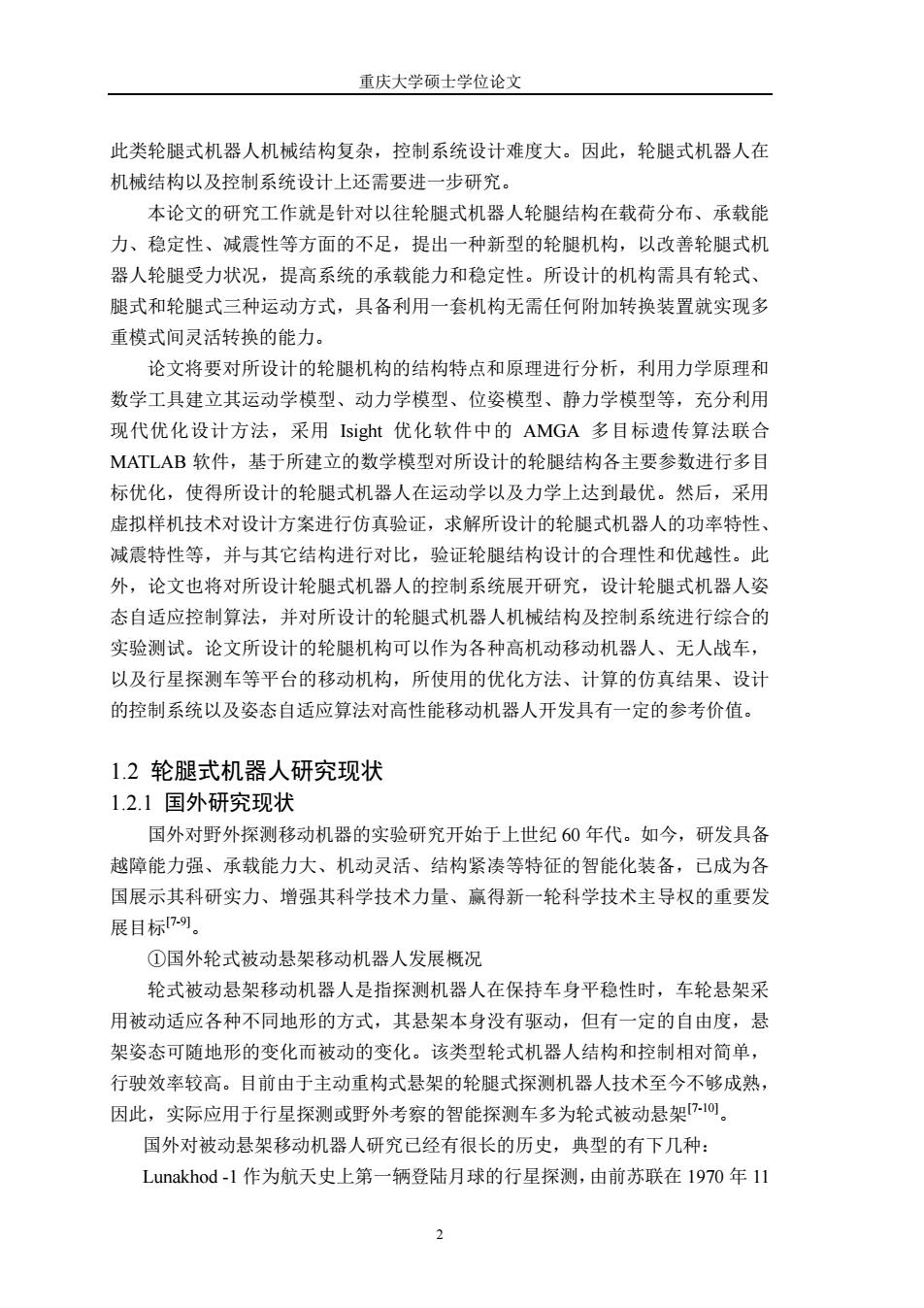
1绪论 月10日成功发射。该探测车长2.2m,宽1.6m,重756kg。为自主式、扭力式悬架 系统,8个轮子均独立驱动,轮子本身不能转向,靠左右车轮差速使车体转向。 Lunakhod-1具备攀登40cm高的障碍以及跨越60cm宽的壕沟的能力山,从一定意 义上说Lunakhod已经具备了轮腿式移动机器人的结构特点,已被众多学者归类为 轮腿式移动机器人2),其结构如图11所示。 (a)Lunokhod-1 (b)Lunokhod-2 图1.1 Lunokhod机器人 Fig.1.1 Lunokhod Robot 20世纪70年代至80年代,轮式被动悬架移动机器人出现了柔性底盘移动系 统。如美国JPL研制的火星探测车地球样机Blue rover和Robbyla]以及前苏联研制 的火星探测车地球样机Marsokhod14,如图1.2(a)、(b)、(c)所示。 (a)Blue rover (b)Robby (c)Marsokhod 图1.2世纪70-80年代柔性底盘移动探测车 Fig.1.2 Mobile robots of flexible chassises of 1970s and 1980s 20世纪90年代,最具代表性的轮式被动悬架移动机器人为美国喷气推进实验 室研制(PL)研制的Rocky系列火星探测车,该系列的行星探测车移动系统主要 采用六轮摇杆悬吊式悬架移动系统5-1刀。图1.3(a、(b)、(C)所示。 3
1 绪 论 3 月 10 日成功发射。该探测车长 2.2m,宽 1.6m,重 756kg。为自主式、扭力式悬架 系统,8 个轮子均独立驱动,轮子本身不能转向,靠左右车轮差速使车体转向。 Lunakhod -1 具备攀登 40cm 高的障碍以及跨越 60cm 宽的壕沟的能力[11],从一定意 义上说 Lunakhod 已经具备了轮腿式移动机器人的结构特点,已被众多学者归类为 轮腿式移动机器人[12],其结构如图 1.1 所示。 (a)Lunokhod-1 (b) Lunokhod-2 图 1.1 Lunokhod 机器人 Fig.1.1 Lunokhod Robot 20 世纪 70 年代至 80 年代,轮式被动悬架移动机器人出现了柔性底盘移动系 统。如美国 JPL 研制的火星探测车地球样机 Blue rover 和 Robby[13]以及前苏联研制 的火星探测车地球样机 Marsokhod[14],如图 1.2 (a)、(b)、(c)所示。 (a)Blue rover (b) Robby (c) Marsokhod 图 1. 2 世纪 70-80 年代柔性底盘移动探测车 Fig.1.2 Mobile robots of flexible chassises of 1970s and 1980s 20 世纪 90 年代,最具代表性的轮式被动悬架移动机器人为美国喷气推进实验 室研制 (JPL) 研制的 Rocky 系列火星探测车,该系列的行星探测车移动系统主要 采用六轮摇杆悬吊式悬架移动系统[15-17]。图 1.3 (a)、(b)、(c) 所示