
条纹投影三维检测技术原理: I(x,y)=A(x,y)+B(x,y).cos[o(x,y)+6] I,(x,y)=A(x,y)+ B(x,y).cos o(x,y)+8, 条纹在物体表 面形成弯曲 多帧相移条纹 畸变条纹 投影仪 CCD相机 11
条纹投影三维检测技术原理: 投影仪 CCD相机 11 条纹在物体表 面形成弯曲 多帧相移条纹 I x y A x y B x y x y n n ( , ) ( , ) ( , ) cos ( , ) = + + ' ( , ) ( , ) ( , ) cos ( , ) n n I x y A x y B x y x y = + + 畸变条纹
相位提取 当投影的正弦光栅被移动其周期的1/N时,条纹图的相 位被移动了2π/N,产生一个新的强度函数I(x,y) am2 背景光强氵 调制度 相位变化 g●000 N步相移条纹 12
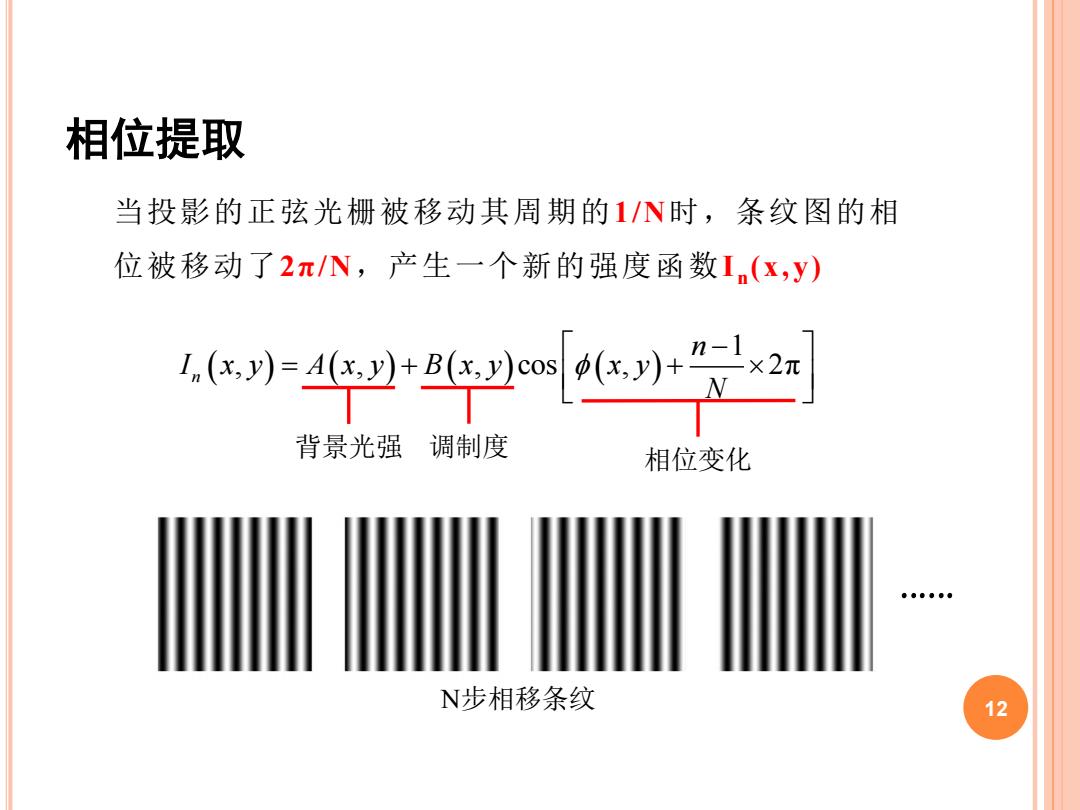
相位提取 12 当投影的正弦光栅被移动其周期的1/N时,条纹图的相 位被移动了2 π/N,产生一个新的强度函数I n ( x,y ) ( ) ( ) ( ) ( ) 1 , , , cos , 2 π − = + + n n I x y A x y B x y x y N …… 背景光强 调制度 相位变化 N步相移条纹