杭州电子科技大学硕士学位论文 或某些机能,具有无限多自由度和连续变形能力的机器人系统2]。软体仿生机器人分为离散 型和连续型),离散型机器人是由一系列刚性链接组成的,中间由关节连接,其典型代表是 由多个模块组成的爬行机器人,一般模仿蛇,毛虫或火蜥蜴等外形。这种类型机器人相比于 传统机器人,增加了更多自由度,但因其刚性零件,仍没有改变自身尺寸的功能,不是真正 意义上的“软体”机器人。 连续型机器人是通过弹性形变来产生弯曲运动,相比于离散型,它的身体结构更轻。这 类机器人一般仿生无骨骼结构的软体动物,模拟更具柔性和灵活性的动物结构,比如章鱼臂、 象鼻、水母等。其中仿生章鱼臂机器人因其承重较大,能够适应水下环境等优势更具有应用 前景与研究意义。 1.2章鱼臂机器人的研究现状 研究人员受启发于章鱼的生理结构、运动模式,研究并设计了多种仿生章鱼机器人,在 建模、驱动及控制等方面取得显著成就。 1.2.1生物结构 章鱼手臂是典型的肌肉性静水骨骼结构,由不同方向的肌肉纤维构成4。章鱼臂是由相 互对抗的横肌和纵肌组成,因为结构的等容性,当横肌收缩时手臂纵向伸长;当纵肌收缩时, 手臂横向伸长。 横肌 斜肌 吸咀 纵肌 图1.1章鱼臂肌肉构成 如图1.1所示,不同方向的肌肉层环绕中枢神经。核心的横肌呈放射状分布并且与斜肌 和纵肌相交错,斜肌纤维呈螺旋状沿顺时针和逆时针两个方向缠绕)。在运动中,章鱼通过 收缩横肌使手臂伸长,收缩纵肌使手臂缩短阿,横肌和纵肌的同时收缩增加了手臂的抗弯刚 度。斜肌的收缩使触手产生扭曲。 研究人员模拟章鱼臂的生物结构以实现机械臂的弯曲、伸缩和取物等运动,因此选取适 合模拟章鱼臂肌肉组织的材料是一项关键性问题,目前仿生章鱼臂机器人根据驱动方式的不 同主要分为以下几类:SMA机器人、PAM机器人、液压驱动机器人和线驱动机器人。 2 万方数据
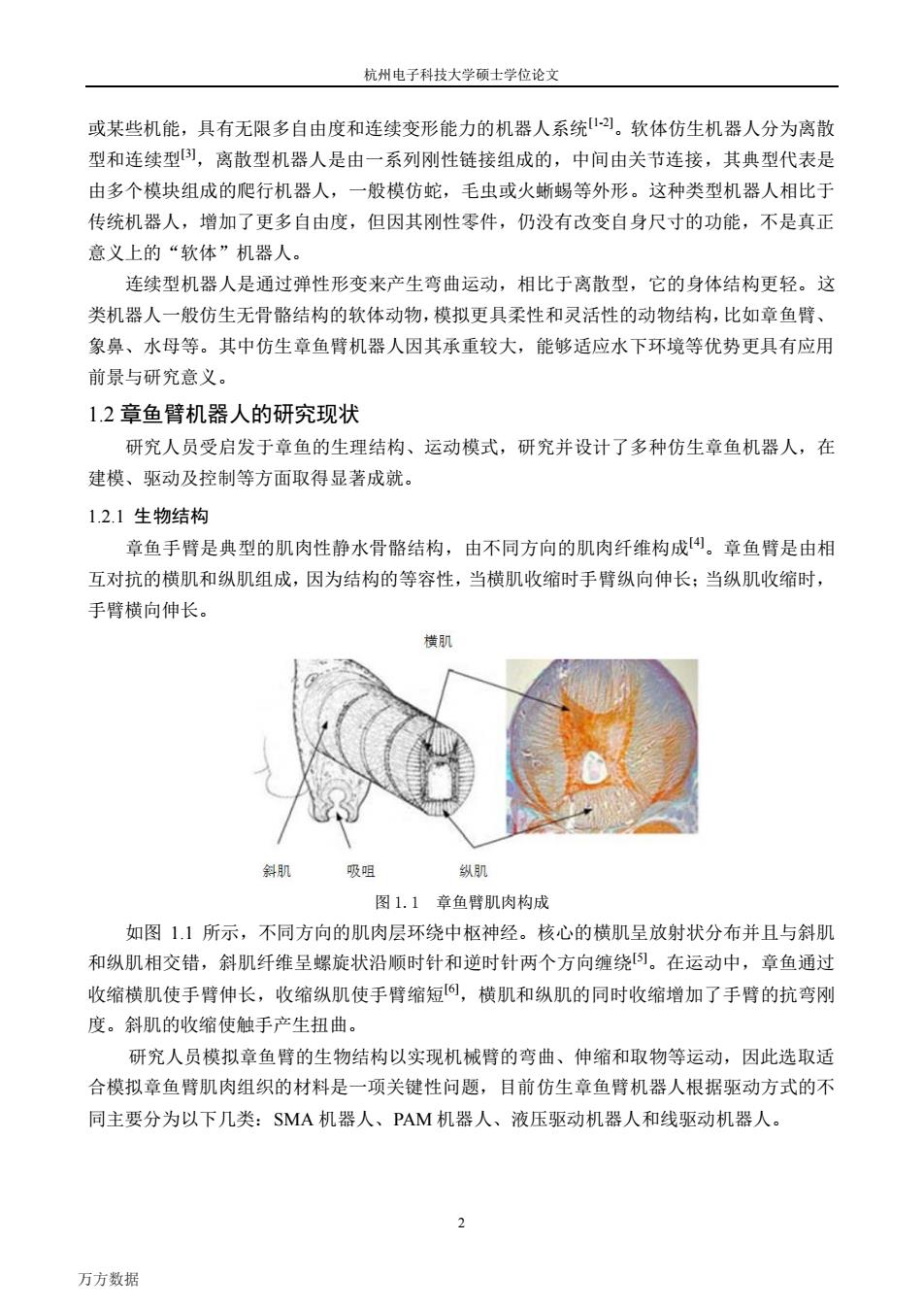
杭州电子科技大学硕士学位论文 2 或某些机能,具有无限多自由度和连续变形能力的机器人系统[1-2]。软体仿生机器人分为离散 型和连续型[3],离散型机器人是由一系列刚性链接组成的,中间由关节连接,其典型代表是 由多个模块组成的爬行机器人,一般模仿蛇,毛虫或火蜥蜴等外形。这种类型机器人相比于 传统机器人,增加了更多自由度,但因其刚性零件,仍没有改变自身尺寸的功能,不是真正 意义上的“软体”机器人。 连续型机器人是通过弹性形变来产生弯曲运动,相比于离散型,它的身体结构更轻。这 类机器人一般仿生无骨骼结构的软体动物,模拟更具柔性和灵活性的动物结构,比如章鱼臂、 象鼻、水母等。其中仿生章鱼臂机器人因其承重较大,能够适应水下环境等优势更具有应用 前景与研究意义。 1.2 章鱼臂机器人的研究现状 研究人员受启发于章鱼的生理结构、运动模式,研究并设计了多种仿生章鱼机器人,在 建模、驱动及控制等方面取得显著成就。 1.2.1 生物结构 章鱼手臂是典型的肌肉性静水骨骼结构,由不同方向的肌肉纤维构成[4]。章鱼臂是由相 互对抗的横肌和纵肌组成,因为结构的等容性,当横肌收缩时手臂纵向伸长;当纵肌收缩时, 手臂横向伸长。 图 1.1 章鱼臂肌肉构成 如图 1.1 所示,不同方向的肌肉层环绕中枢神经。核心的横肌呈放射状分布并且与斜肌 和纵肌相交错,斜肌纤维呈螺旋状沿顺时针和逆时针两个方向缠绕[5]。在运动中,章鱼通过 收缩横肌使手臂伸长,收缩纵肌使手臂缩短[6],横肌和纵肌的同时收缩增加了手臂的抗弯刚 度。斜肌的收缩使触手产生扭曲。 研究人员模拟章鱼臂的生物结构以实现机械臂的弯曲、伸缩和取物等运动,因此选取适 合模拟章鱼臂肌肉组织的材料是一项关键性问题,目前仿生章鱼臂机器人根据驱动方式的不 同主要分为以下几类:SMA 机器人、PAM 机器人、液压驱动机器人和线驱动机器人。 万方数据
杭州电子科技大学硕士学位论文 1.2.2建模方式 建立精确的模型是研究控制方式的前提,对于仿生机器人的设计也是至关重要的。许多 研究者采用实验的方法对其模仿对象进行生物力学分析和建模,比如Mazaolai等解剖了章 鱼臂,分析其肌肉结构,并通过实验绘制其应力-应变曲线:Yekutieli等8]采用三维重建技术 分析章鱼手臂运动。还有一些研究人员通过理论分析的方法建模,比如Kag等9建立的三维 多段集总参数动力学模型,Liag等io建立的有限元模型模拟肌肉型静水骨骼结构。 1)二维多段模型 Yekutieli等人模拟章鱼臂生理结构,利用矩形边模拟章鱼臂肌肉组织,提出了二维多段 章鱼臂模型山。在该模型中手臂模拟成一个由质点和弹簧组成的阵列。手臂质量完全集中在 矩形顶点上,假设矩形边无质量并且利用理想弹簧模拟章鱼臂的横肌和纵肌。 背部肌 手臂尖端 手臂底部 腹侧肌 横肌 横肌 纵肌 图1.2二维多段章鱼臂模型 2)三维多段模型 Kang等人根据章鱼臂生物结构建立三维多段动力学模型,该模型中的单臂是由多个立体 梯形段组成,其中单独一段的上端是可以移动的平台,下端是固定基底,中心支柱连接上下 两个平面,线性活塞/气缸系统模拟肌肉功能,四个“纵肌”和四个“斜肌”分布如图1.3所 示。“纵肌”在这里的作用是调整移动平台的高度和方向,“斜肌”的伸缩决定了移动平台的 半径范围。每一个段的移动平台同时也是上一个段的固定基底,同样,该段的固定基底同时 也是下一段的移动平台,这样多段就连接成单臂,并且可以在指定段弯曲。移动平台有三个 自由度,两个沿x、y轴的旋转自由度和一个沿z轴的平移自由度。 3 万方数据
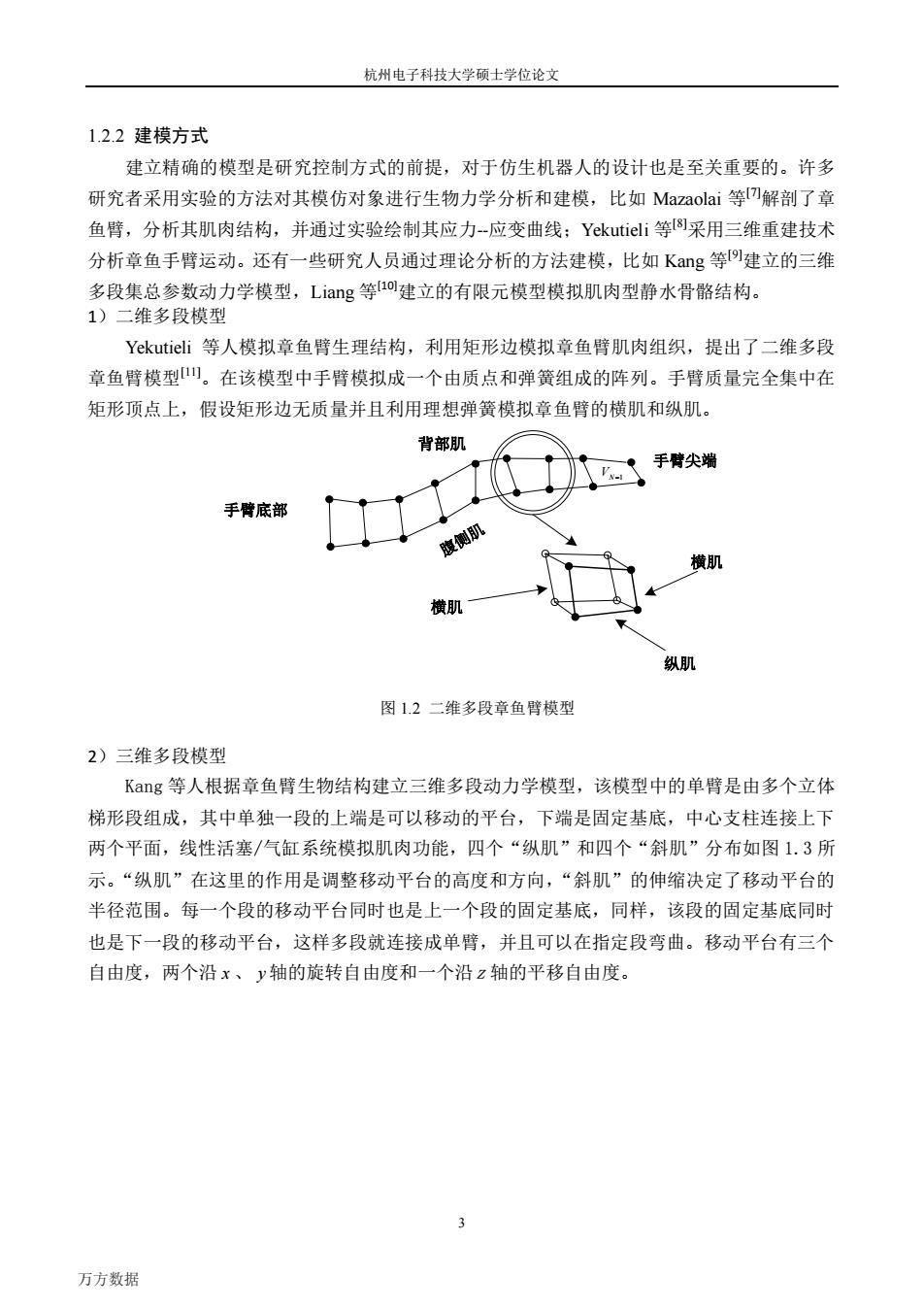
杭州电子科技大学硕士学位论文 3 1.2.2 建模方式 建立精确的模型是研究控制方式的前提,对于仿生机器人的设计也是至关重要的。许多 研究者采用实验的方法对其模仿对象进行生物力学分析和建模,比如 Mazaolai 等[7]解剖了章 鱼臂,分析其肌肉结构,并通过实验绘制其应力--应变曲线;Yekutieli 等[8]采用三维重建技术 分析章鱼手臂运动。还有一些研究人员通过理论分析的方法建模,比如 Kang 等[9]建立的三维 多段集总参数动力学模型,Liang 等[10]建立的有限元模型模拟肌肉型静水骨骼结构。 1)二维多段模型 Yekutieli 等人模拟章鱼臂生理结构,利用矩形边模拟章鱼臂肌肉组织,提出了二维多段 章鱼臂模型[11]。在该模型中手臂模拟成一个由质点和弹簧组成的阵列。手臂质量完全集中在 矩形顶点上,假设矩形边无质量并且利用理想弹簧模拟章鱼臂的横肌和纵肌。 VN 1 手臂底部 腹侧肌 背部肌 横肌 横肌 纵肌 手臂尖端 图 1.2 二维多段章鱼臂模型 2)三维多段模型 Kang 等人根据章鱼臂生物结构建立三维多段动力学模型,该模型中的单臂是由多个立体 梯形段组成,其中单独一段的上端是可以移动的平台,下端是固定基底,中心支柱连接上下 两个平面,线性活塞/气缸系统模拟肌肉功能,四个“纵肌”和四个“斜肌”分布如图 1.3 所 示。“纵肌”在这里的作用是调整移动平台的高度和方向,“斜肌”的伸缩决定了移动平台的 半径范围。每一个段的移动平台同时也是上一个段的固定基底,同样,该段的固定基底同时 也是下一段的移动平台,这样多段就连接成单臂,并且可以在指定段弯曲。移动平台有三个 自由度,两个沿 x 、 y 轴的旋转自由度和一个沿 z 轴的平移自由度。 万方数据

杭州电子科技大学硕士学位论文 移动平台 B 对 斜肌 B,的 纵肌 X A 固定基底 图1.3三维模型一段结构示意 如上图所示,各个顶点处、中心支柱与平台和基底的连接处都由不同的关节连接。 3)有限元模型 有限元分析方法就是在有限的单元中嵌入肌肉纤维以模拟肌肉型骨骼结构的运动特性。 动态有限元方法相对于以往传统的理论分析有其特有的优势:容易模拟出多种形状和拓扑结 构的肌肉结构,可以自动获取三维响应,可以在分析方法中加入一些极限情况比如纯粹的运 动响应和拟静态平衡。 肌肉纤维 有限元 图1.4一个有限元中的肌肉纤维 在一个有限元中嵌入肌肉纤维,其方向可以任意设定,如图1.4中,按照肌肉纤维的方向 建立柯西坐标系,m,为平行于肌肉纤维的单元向量。建立三维肌肉结构,分析计算该有限元中 肌肉纤维的轴向压力σ”。通过对比章鱼捕食过程中的手臂伸长运动的数据可以证明有限元模 型的有效性。 1.2.3驱动方式 驱动器是软体机器人设计中的关键问题,软体机器人自身结构和运动形式的特殊性,对 致动器的设计提出了更高的要求,如惯量、灵活性、刚度可变及功率消耗等方面。软体机器 人的驱动方式主要有物理驱动和化学驱动两种,本文主要介绍物理驱动。 1)SMA驱动 形状记忆合金(Shape Memory Alloy)是一种能够“记忆”原有形状的智能材料l2,加 万方数据
杭州电子科技大学硕士学位论文 4 1 A 2 A 3 A 4 A 1 B 2 B 3 B4 B 斜肌 纵肌 固定基底 移动平台 x y z 图 1.3 三维模型一段结构示意 如上图所示,各个顶点处、中心支柱与平台和基底的连接处都由不同的关节连接。 3)有限元模型 有限元分析方法就是在有限的单元中嵌入肌肉纤维以模拟肌肉型骨骼结构的运动特性。 动态有限元方法相对于以往传统的理论分析有其特有的优势:容易模拟出多种形状和拓扑结 构的肌肉结构,可以自动获取三维响应,可以在分析方法中加入一些极限情况比如纯粹的运 动响应和拟静态平衡。 有限元 肌肉纤维 0 m mi 图1.4 一个有限元中的肌肉纤维 在一个有限元中嵌入肌肉纤维,其方向可以任意设定,如图1.4中,按照肌肉纤维的方向 建立柯西坐标系, mi 为平行于肌肉纤维的单元向量。建立三维肌肉结构,分析计算该有限元中 肌肉纤维的轴向压力 0 m 。通过对比章鱼捕食过程中的手臂伸长运动的数据可以证明有限元模 型的有效性。 1.2.3 驱动方式 驱动器是软体机器人设计中的关键问题,软体机器人自身结构和运动形式的特殊性,对 致动器的设计提出了更高的要求,如惯量、灵活性、刚度可变及功率消耗等方面。软体机器 人的驱动方式主要有物理驱动和化学驱动两种,本文主要介绍物理驱动。 1)SMA 驱动 形状记忆合金(Shape Memory Alloy)是一种能够“记忆”原有形状的智能材料[12],加 万方数据
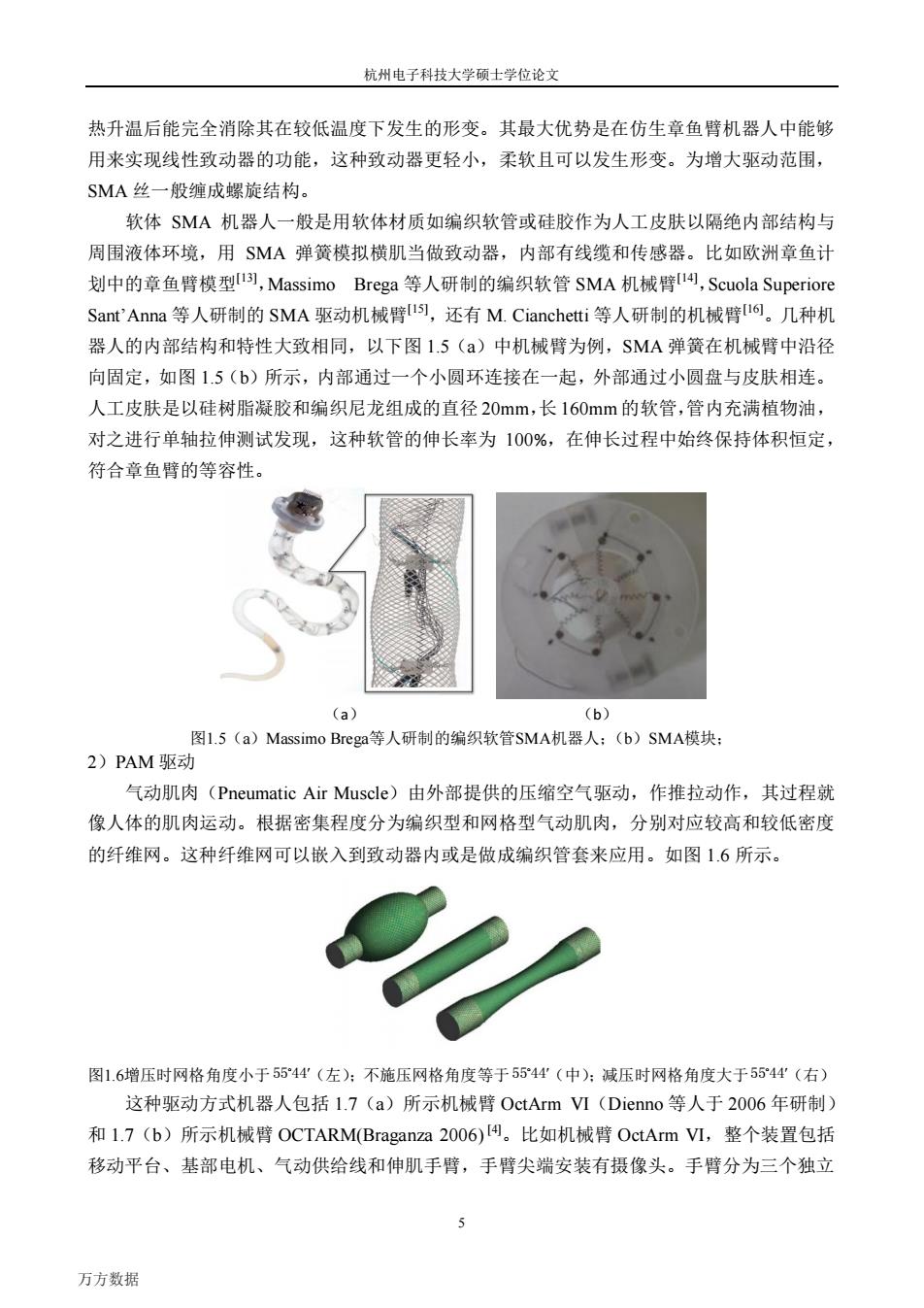
杭州电子科技大学硕士学位论文 热升温后能完全消除其在较低温度下发生的形变。其最大优势是在仿生章鱼臂机器人中能够 用来实现线性致动器的功能,这种致动器更轻小,柔软且可以发生形变。为增大驱动范围, SMA丝一般缠成螺旋结构。 软体SMA机器人一般是用软体材质如编织软管或硅胶作为人工皮肤以隔绝内部结构与 周围液体环境,用SMA弹簧模拟横肌当做致动器,内部有线缆和传感器。比如欧洲章鱼计 划中的章鱼臂模型l],Massimo Brega等人研制的编织软管SMA机械臂14,Scuola Superiore Sant'Anna等人研制的SMA驱动机械臂l],还有M.Cianchetti等人研制的机械臂6。几种机 器人的内部结构和特性大致相同,以下图1.5(a)中机械臂为例,SMA弹簧在机械臂中沿径 向固定,如图1.5(b)所示,内部通过一个小圆环连接在一起,外部通过小圆盘与皮肤相连。 人工皮肤是以硅树脂凝胶和编织尼龙组成的直径20mm,长160mm的软管,管内充满植物油, 对之进行单轴拉伸测试发现,这种软管的伸长率为100%,在伸长过程中始终保持体积恒定, 符合章鱼臂的等容性。 (a) (b) 图l.5(a)Massimo Brega等人研制的编织软管SMA机器人;(b)SMA模块; 2)PAM驱动 气动肌肉(Pneumatic Air Muscle)由外部提供的压缩空气驱动,作推拉动作,其过程就 像人体的肌肉运动。根据密集程度分为编织型和网格型气动肌肉,分别对应较高和较低密度 的纤维网。这种纤维网可以嵌入到致动器内或是做成编织管套来应用。如图1.6所示。 图1.6增压时网格角度小于5544'(左):不施压网格角度等于5544'(中):减压时网格角度大于55°44'(右) 这种驱动方式机器人包括1.7(a)所示机械臂OctArm VI(Dienno等人于2006年研制) 和1.7(b)所示机械臂OCTARM(Braganza2006)。比如机械臂OctArm VI,整个装置包括 移动平台、基部电机、气动供给线和伸肌手臂,手臂尖端安装有摄像头。手臂分为三个独立 万方数据
杭州电子科技大学硕士学位论文 5 热升温后能完全消除其在较低温度下发生的形变。其最大优势是在仿生章鱼臂机器人中能够 用来实现线性致动器的功能,这种致动器更轻小,柔软且可以发生形变。为增大驱动范围, SMA 丝一般缠成螺旋结构。 软体 SMA 机器人一般是用软体材质如编织软管或硅胶作为人工皮肤以隔绝内部结构与 周围液体环境,用 SMA 弹簧模拟横肌当做致动器,内部有线缆和传感器。比如欧洲章鱼计 划中的章鱼臂模型[13],Massimo Brega 等人研制的编织软管 SMA 机械臂[14],Scuola Superiore Sant’Anna 等人研制的 SMA 驱动机械臂[15],还有 M. Cianchetti 等人研制的机械臂[16]。几种机 器人的内部结构和特性大致相同,以下图 1.5(a)中机械臂为例,SMA 弹簧在机械臂中沿径 向固定,如图 1.5(b)所示,内部通过一个小圆环连接在一起,外部通过小圆盘与皮肤相连。 人工皮肤是以硅树脂凝胶和编织尼龙组成的直径 20mm,长 160mm 的软管,管内充满植物油, 对之进行单轴拉伸测试发现,这种软管的伸长率为 100%,在伸长过程中始终保持体积恒定, 符合章鱼臂的等容性。 (a) (b) 图1.5(a)Massimo Brega等人研制的编织软管SMA机器人;(b)SMA模块; 2)PAM 驱动 气动肌肉(Pneumatic Air Muscle)由外部提供的压缩空气驱动,作推拉动作,其过程就 像人体的肌肉运动。根据密集程度分为编织型和网格型气动肌肉,分别对应较高和较低密度 的纤维网。这种纤维网可以嵌入到致动器内或是做成编织管套来应用。如图 1.6 所示。 图1.6增压时网格角度小于 55 44 (左);不施压网格角度等于 55 44 (中);减压时网格角度大于 55 44 (右) 这种驱动方式机器人包括 1.7(a)所示机械臂 OctArm VI(Dienno 等人于 2006 年研制) 和 1.7(b)所示机械臂 OCTARM(Braganza 2006) [4]。比如机械臂 OctArm VI,整个装置包括 移动平台、基部电机、气动供给线和伸肌手臂,手臂尖端安装有摄像头。手臂分为三个独立 万方数据
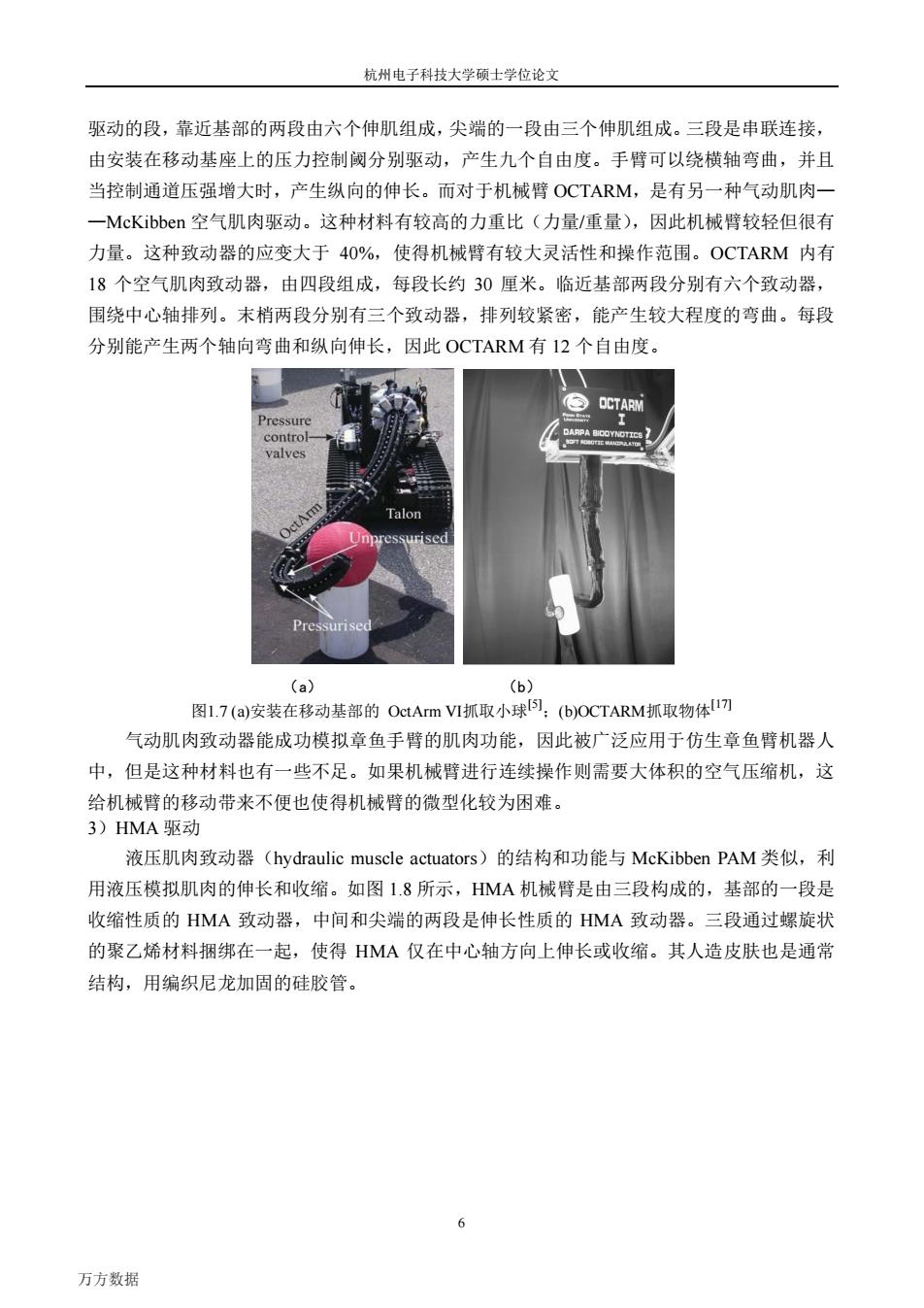
杭州电子科技大学硕士学位论文 驱动的段,靠近基部的两段由六个伸肌组成,尖端的一段由三个伸肌组成。三段是串联连接, 由安装在移动基座上的压力控制阈分别驱动,产生九个自由度。手臂可以绕横轴弯曲,并且 当控制通道压强增大时,产生纵向的伸长。而对于机械臂OCTARM,是有另一种气动肌肉一 一McKibben空气肌肉驱动。这种材料有较高的力重比(力量/重量),因此机械臂较轻但很有 力量。这种致动器的应变大于40%,使得机械臂有较大灵活性和操作范围。OCTARM内有 18个空气肌肉致动器,由四段组成,每段长约30厘米。临近基部两段分别有六个致动器, 围绕中心轴排列。末梢两段分别有三个致动器,排列较紧密,能产生较大程度的弯曲。每段 分别能产生两个轴向弯曲和纵向伸长,因此OCTARM有12个自由度。 OCTARM Pressure control- DARPA RICO valves Talon Unpressurised (a) (b) 图1.7(a)安装在移动基部的OctArm VI抓取小球):(b)OCTARM抓取物体17 气动肌肉致动器能成功模拟章鱼手臂的肌肉功能,因此被广泛应用于仿生章鱼臂机器人 中,但是这种材料也有一些不足。如果机械臂进行连续操作则需要大体积的空气压缩机,这 给机械臂的移动带来不便也使得机械臂的微型化较为困难。 3)HMA驱动 液压肌肉致动器(hydraulic muscle actuators)的结构和功能与McKibben PAM类似,利 用液压模拟肌肉的伸长和收缩。如图1.8所示,HMA机械臂是由三段构成的,基部的一段是 收缩性质的HMA致动器,中间和尖端的两段是伸长性质的HMA致动器。三段通过螺旋状 的聚乙烯材料捆绑在一起,使得HMA仅在中心轴方向上伸长或收缩。其人造皮肤也是通常 结构,用编织尼龙加固的硅胶管。 6 万方数据
杭州电子科技大学硕士学位论文 6 驱动的段,靠近基部的两段由六个伸肌组成,尖端的一段由三个伸肌组成。三段是串联连接, 由安装在移动基座上的压力控制阈分别驱动,产生九个自由度。手臂可以绕横轴弯曲,并且 当控制通道压强增大时,产生纵向的伸长。而对于机械臂 OCTARM,是有另一种气动肌肉— —McKibben 空气肌肉驱动。这种材料有较高的力重比(力量/重量),因此机械臂较轻但很有 力量。这种致动器的应变大于 40%,使得机械臂有较大灵活性和操作范围。OCTARM 内有 18 个空气肌肉致动器,由四段组成,每段长约 30 厘米。临近基部两段分别有六个致动器, 围绕中心轴排列。末梢两段分别有三个致动器,排列较紧密,能产生较大程度的弯曲。每段 分别能产生两个轴向弯曲和纵向伸长,因此 OCTARM 有 12 个自由度。 (a) (b) 图1.7 (a)安装在移动基部的 OctArm VI抓取小球[5] ;(b)OCTARM抓取物体[17] 气动肌肉致动器能成功模拟章鱼手臂的肌肉功能,因此被广泛应用于仿生章鱼臂机器人 中,但是这种材料也有一些不足。如果机械臂进行连续操作则需要大体积的空气压缩机,这 给机械臂的移动带来不便也使得机械臂的微型化较为困难。 3)HMA 驱动 液压肌肉致动器(hydraulic muscle actuators)的结构和功能与 McKibben PAM 类似,利 用液压模拟肌肉的伸长和收缩。如图 1.8 所示,HMA 机械臂是由三段构成的,基部的一段是 收缩性质的 HMA 致动器,中间和尖端的两段是伸长性质的 HMA 致动器。三段通过螺旋状 的聚乙烯材料捆绑在一起,使得 HMA 仅在中心轴方向上伸长或收缩。其人造皮肤也是通常 结构,用编织尼龙加固的硅胶管。 万方数据