第5卷第5期 智能系统学报 Vol.5 No.5 2010年10月 CAAI Transactions on Intelligent Systems 0ct.2010 doi:10.3969/j.issn.16734785.2010.05.015 二维正态云模型的单规则推理映射 李众1,刘艳2 (1.常州信息职业技术学院电子与电气工程学院,江苏常州213164:2.南京邮电大学光电工程学院,江苏南京210003) 摘要:针对二维正态云模型在实现数据的定量输入到规则的定性推理、再到数据的定量输出的转换过程中,其输 出与输人之间的映射区域存在的不确定性问题,通过构造3σ正态分布随机数,在输入云模型与输出云模型分别具 有相同的嫡参数和超熵参数的情况下,总结出二维正态云模型的单规则推理映射规律,指出该映射区域是一个发散 区域,其大小不但与云模型的参数期望有关,而且还与参数嫡和超嫡有关,而最大离散系数则与期望无关,该结论可 以作为二维正态云模型多规则映射研究的理论指导, 关键词:云模型;规则推理;映射 中图分类号:TP18;TP273文献标识码:A文章编号:16734785(2010)05046407 Single rule reasoning mapping for the two dimensional normal cloud model LI Zhong,LIU Yan2 (1.Institute of Electronic and Electrical Engineering,Changzhou College of Information Technology,Changzhou 213164,China; 2.College of Optoelectronic Engineering,Nanjing University of Posts Telecommunication,Nangjing 210003,China) Abstract:Due to the fact that the two-dimensional normal cloud model is used for conversion from the quantitative input of data to the qualitative rules of reasoning,and then to the quantitative output of data,the mapping of the re- gion from the input to the output is very uncertain.By constructing the normal distribution random number with as the parameter,in the case of the input cloud model having the same entropy and hyper entropy as the output cloud model,some conclusions of the single rule of reasoning mapping for the two-dimensional normal cloud model were summed up.It was also pointed out that the mapping region is a divergent region,and the size of the area is not on- ly related to the cloud model parameter of the expected value,but also to the parameters of the entropy and hyper entropy.However,the maximum dispersion coefficient is not related to the parameter of the expected value.The conclusions can serve as a two-dimensional normal cloud model for the purpose of mapping more rules. Keywords:cloud model;rule reasoning;mapping 云模型概念最早以隶属云山的概念于1995年 在人工智能与智能控制领域,文献[12]首次将 被正式提出,其本质是一种用数字特征表达语言概 云模型的数学表达方式和不确定性规则推理方法应 念的数学模型.云模型首先应用于KDD23](knowl- 用于控制器设计,文献[13-14]则将该方法用于倒立 edge discovery in databases)DMKD!4(data mining 摆的控制过程.实际上,控制器所实现的输入输出控 and knowledge discovery)领域,除此之外,还涉及不 制关系就是一种映射关系5],基于云模型规则推理 确定性人工智能5)、智能控制等领域61).10余年的 的智能控制过程实现的是定量数据→定性推理→定 发展进程表明,云模型在表达、处理不确定性概念方 量数据的映射过程,即偏差输人→规则推理→控制 面,融合了不确定性所具有的模糊性和随机性[⑧], 量输出的控制过程.在此基础上,文献[16-17]设计 具有并行推理、定性与定量转换等功能0山,呈 了基于云模型映射器的智能控制器,文献[18]对一 现出其内涵的独特性, 维正态云模型的单规则推理过程及映射关系进行了 研究,揭示出这种映射关系与云模型的3个特征参 收稿日期:200904-17. 通信作者:李众.E-mail:xlizhong(@163.com 数之间的内在关联规律,对云模型所蕴含的不确定

第5期 李众,等:二维正态云模型的单规则推理映射 ·465· 性进行了新的量化解释.对于二维正态云模型的单 1)对称映射区域S=S1US2,且映射区域的原 规则推理过程而言,这种映射过程是否也存在类似 点坐标为(Ex,Ey,Ex). 的关联规律?本文将就此进行初步研究 映射区域S:a=Ez+√(x-Ex)2+(y-Ey), 1二维云模型 当Ex≤x≤Eax+3En时. 映射区域S2:z=Ez-√(x-E)2+(y-Ey), 定义1满足下列条件的随机数x=WR。(u, 当Ex-3En≤x<Ex时. σ)称为3σ正态分布随机数, 显然,S=S1US2也可以表示为c=E+ 1)x=X~N(u,o2),当h-30≤x≤4+3o; sign(x-Ex)√(x-Ex)2+(y-Ey),称为对称映射 2)x=4-30,当x<u-30; 核心区域(或核心曲面). 3)x=4+30,当x>4+30; 2)反对称推理映射区域S4=S3US4,且映射区 4)X~N(4,σ2)是以4为均值、σ为标准差的 域的原点坐标为(Ex,Ey,Ex). 正态分布随机数 定义2在二维X条件云模型6基础上稍作修政: 映射区域S3:z=E-√(x-Ex)2+(y-Ey), Px NR (Enx,Hex), 当Ex≤x≤Ex+3En时. Py=NRn(Eny,Hey), 映射区域S4:z=Ez+√(x-Ex)2+(y-y), “a份+7} 当Ex-3En≤x<Ex时. Py2 (1) 显然S4=S3US4也可以表示为a4C=E:- 称为二维X条件3σ云模型. ig(x-Ex)·√(x-Ex)2+(y-Ey)产,称为反对称 定义3在Y条件云模型6基础上稍作修改: 映射核心区域(或核心曲面). Pa=NRn(Enz,Hez), 证明HxeU,Hy∈V,将式(1)代入式(2),有 z=Ez±J-2ln()·Pz (2) z=Ez±√-2ln(u)·Pz= 称为Y条件3σ云模型. Ea±,a5+y,y.P.(3) 为简明起见,如不作特别声明,以下所述的云模 V Px2 Py2 型均指正态云模型. 当Px≡Py=Pz=P,则 2单规则推理映射分析 z=Ez±√(x-Ex)2+(y-Ey)2.(4) 显然,坐标(Ex,Ey,E)是式(4)的原点,“±”号取 定义4设U=[Ex-3Enx,Ex+3Enx],V= 决于定义4的推理方式 [Ey-3Eny,Ey +3Eny ]W=[Ez -3Enz,Ez+ 1)采用对称推理,当x≥Ex,取“+”号;当x< 3Enz],输入云模型X=(Ex,Enx,Hex)、Y=(Ey, Ex,取“-”号.即 Ey,Hey)和输出云模型Z=(Ez,Enz,Hez)分别定义 映射区域S1:z=Ez+√(x-Ex)2+(y-Ey)2, 在论域U、V和W上. 当Ex≤x≤Ex+3En时. 考虑二维云模型单规则推理:if X and Y then 2. 映射区域S2:z=Ez-√(x-Ex)2+(y-Ey)产, Hx∈U,VyeV,HzeW,当z>Ez+3En时,取 当Ex-3En≤x<Ex时. z=Ez+3En;当z<Ez-3En时,取z=Ez-3En. 对称推理映射区域S=SUS2成立. 1)若当x≥Ex时,取z≥Ez;当x<Ex时,取z< 2)采用反对称推理,当x≥Ex,取“-”号;当x< Ez,则称为对称推理,其映射为对称映射. Ex,取“+”号.即 2)若当x≥Ex时,取z≤Ez;当x<Ex时,取z> E:,则称为反对称推理,其映射为反对称映射 映射区域S:a=Ez-√(x-Ex)2+(y-Ey), 引理1设Enx=Ey=Enz=En>0,Hex= 当Eax≤x≤Ex+3En时. Hey=Hez =He >0,En -3He >0,sign (x)= 映射区域S4:z=E+√(x-Ex)+(y-Ey), [+1,≥0当Px=P=P:=P时,则 当Ex-3En≤x<Ex时. 1-1,x<0. 反对称推理映射区域S4=S3US4成立

466. 智能系统学报 第5卷 定理1二维正态云模型单规则推理映射: √(x-E)'+(y-).12En·e Ena Eny Enz =En >0,Hex Hey Hez En2-9He2 He,En-3He >0,YPx,Y Py,Y Pz,YxEU,VyE V, b)当x≤Ex时,则式(3)取“-”号,有 Hz∈W,则4.=max(z)-min(z)∈[0,△m],其 a=Ez- x-Ex+-】.P= 中.4-V-+0-列·张称 Px2 Py 则 △为二维输入点(x,y)映射的最大离散距离, min(2)=Ez- 岛+ ·max(Pz)= 《器是路为二维缩入点(,)映射的最大 √二2z+二z·(Em+3e)= Ea- (x-Ex)2 离散系数。 证明由引理1,考虑Px、Py、P:是3σ正态分 压-√(x-a)}+(g-E.m+3e (7) 布随机数,且En-3He>0,故 En-3He Px E [En -3He,En +3He],Px >0; max(2)=Ez- E-)+y- ·min(Pz)= Py E [En-3He,En +3He],Py >0; Vmax(Px)max(Py)2 Pa E [En -3He,En +3He],Pz 0. (-Ex)2(y-Ey)2 岳-√Bm+3e+B+3(Bm-3)= 显然, max(Px)=En +3He >0, &--圆+g-·÷躁 (8) min(Px)=En-3He>0, 故 max(Py)=En+3He>0, △a2=max(z)-min(z)= min(Py)=En-3He>0, max(Pz)En +3He >0, √(e-E)+(y-).(Bn+3e_Em-3 En.-3He En.+3He min(Pz)=En-3He>0. √(x-Ex)'+(y-E).12EBn·He 1)考虑对称推理. En2-9He2 a)当x≥Ex时,则式(3)取“+”号,有 2)考虑反对称推理, -E+-.P a)当x≤Ex时,则式(3)取“+”号,有 =E+NPx Py2 z=Ez+ &-E】+Y-.P= 则 Py2 则 min(z)=Ea+ x-+y- V max(Px)2 max(乃y)·min(Pe)= min(2)=Ez+ =+- ·min(Pz)= Vmax(Px)2 max(Py)2 (xExe)(y -Ey)? √(m+3e+(m+3h(Bm-3e)= Ez+ +√德+品(-) Ez B+√x-B+(g-}.-3 En +3He (5) 压+√(e-B)+(y-}.Bm-3e En +3He (9) (-Ex)(y -Ey) m(a)=压+√mnP+mn7·maB)- max(z)=Ea+ x-+y- Vmin(Px)2 min(Py)2 ·max(Pz)= (a-Ea)(y-Ey) √(Bn-3+(Bn-3·(Bm+3e)= Ez+ &+层盛+岛+) (x-Exe) 压+√(e-B+(y-》.Em+3e En-3He (6) 屈+√(e-E}+g-.Bn+3e En.-3He (10) 故 故 △a1=max(z)-min(z)= △z3=max(z)-min(z)= (-Ea)+(y -Ey).(En +3He_En-3He) En.-3He En.+3Hel √(e-Ex+g-》.(n+3_n-3 En-3He En +3He/
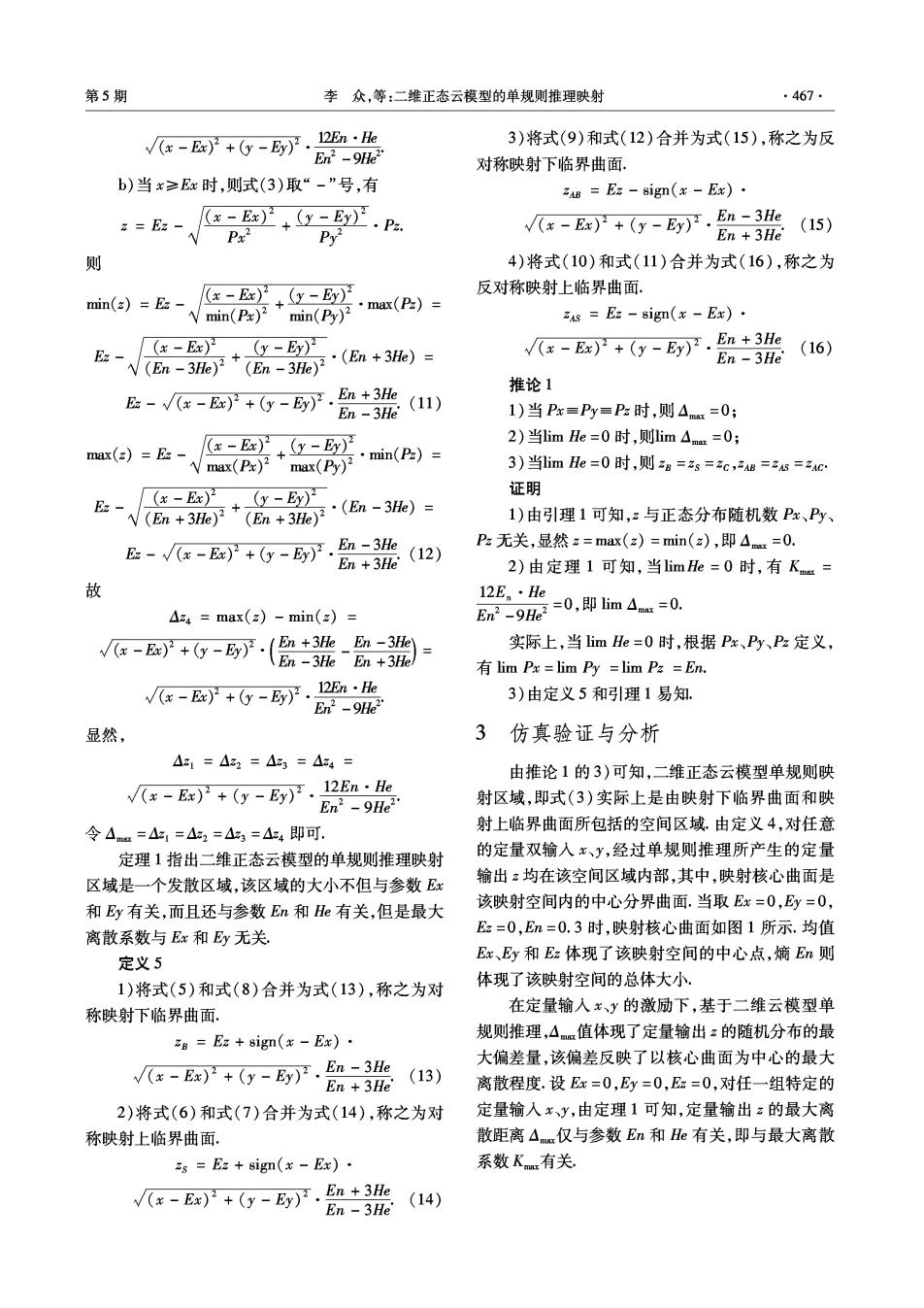
第5期 李众,等:二维正态云模型的单规则推理映射 .467 √-P+g-B.1B 3)将式(9)和式(12)合并为式(15),称之为反 En2-9He 对称映射下临界曲面. b)当x≥Ex时,则式(3)取“-”号,有 28=Ez-sign(x-Ex)· z=Ea- x-+-.P2 V Px2 Py2 √(x-Ex)+(y-E).En-3 En 3He (15) 则 4)将式(10)和式(11)合并为式(16),称之为 感+ 反对称映射上临界曲面, min(z)=Ez- min(Py)2 ·max(Pz)= zas=Ez-8ign(x-Ex)· Ez- (-Ea)(y-Ey) (Bn-3y+(Ea-3·(+3振)= √(x-Ex)+(y-E).Bn+3 (16) En -3He B-√(x-B)P+g-}.n+3e 推论1 Bm-3(11) 1)当Px=Py≡Pz时,则△m=0; 2)当1imHe=0时,则lim△ma=0; max(z)=E- &-E+y- √max(Px)2max(Py)2 ·min(Pz)= 3)当lim He=0时,则2g=2s=zc,24B=2s=24c 证明 √(Bm+3e+(Bm+3·(Bm-3e)= Ez- (-Ex)(y-Ey)2 1)由引理1可知,z与正态分布随机数Px、Py、 E-√(e-B)2+(-}.-3e En +3He (12) Pz无关,显然z=max(z)=min(z),即△mr=0. 2)由定理1可知,当lim He=0时,有Kmm= 故 △a4=max(z)-min(z)= Bn-9He=0,即lim4m=0. 12En·He √c-)+0-).(B+3_m-3 实际上,当lim He=0时,根据Px、Py、Pz定义, En -3He En +3He lim Px lim Py lim P2 En. √x-2+g-}.1B·e 3)由定义5和引理1易知. En2-9He 显然, 3仿真验证与分析 △a1=△x2=△a3=△24= 由推论1的3)可知,二维正态云模型单规则映 √(x-Ex)'+(y-Ey).12En·e En2-9He2 射区域,即式(3)实际上是由映射下临界曲面和映 令Ama=△z1=△2=△23=△24即可. 射上临界曲面所包括的空间区域。由定义4,对任意 定理1指出二维正态云模型的单规则推理映射 的定量双输入x、y,经过单规则推理所产生的定量 区域是一个发散区域,该区域的大小不但与参数Ex 输出:均在该空间区域内部,其中,映射核心曲面是 和Ey有关,而且还与参数En和e有关,但是最大 该映射空间内的中心分界曲面.当取Ex=0,Ey=0, 离散系数与Ex和Ey无关 Ez=0,En=0.3时,映射核心曲面如图1所示.均值 定义5 Ex、Ey和Ez体现了该映射空间的中心点,熵En则 1)将式(5)和式(8)合并为式(13),称之为对 体现了该映射空间的总体大小 称映射下临界曲面. 在定量输入x、y的激励下,基于二维云模型单 2B=Ez+sign(x-Ex)· 规则推理,△m值体现了定量输出z的随机分布的最 大偏差量,该偏差反映了以核心曲面为中心的最大 (-Ex)+(y -Ey)=.En-3He En +3He (13) 离散程度.设Ex=0,Ey=0,Ez=0,对任一组特定的 2)将式(6)和式(7)合并为式(14),称之为对 定量输人x、y,由定理1可知,定量输出:的最大离 称映射上临界曲面 散距离△mc仅与参数En和He有关,即与最大离散 as=Ez+sign(x-Ex)· 系数Kmn有关 √(x-Ex)+(y-Ey).Bn+3 (14) En-3He

·468 智能系统学报 第5卷 -0.2 -0.3 -0.4 N -0.5 -0.6 -0.7 -0.8 1.0 -0.9 -1.00020.40.6087.0 -0. X 0.500.50080604020 (a)对称映射核心曲面S1 (6)对称快射核心曲面S2 -0.2 -0.4 N-0.6、 -0.8 8 -1.0 01 1.0 0.5 1.0 0 ,-10六0020406087.0 0.5 01 -0.5 -0.5 X i.008-0.60.4-0.20 (c)反对称映射核心前血S3 (d)反对称映射核心曲血S4 图1二维云模型单规则映射核心区域 Fig.1 The core mapping areas of the single rule reasoning based on two dimension cloud model 图2(a)~(f)所示为单规则映射最大误差区域 时,则取限幅值(Ez+3En)-(Ez-3En)=6En.显 图,表1说明了图2中参数En和He对映射区域的 然,Kms越大,max(△mm)越容易达到限幅值,当 影响关系.max(△m)表示对△mm取最大值,根据定 Kma=V2时,max(Am=)仅在4个输入点(x,y)= 理1,max(△mm)出现在输人(x,y)=(x±3En,y± (x±3En,y±3En)达到限幅值,而其他则小于该限 3En)处,当其超出z的变化范围(Ez-3En,Ez+3En) 幅值(由定理1易知). 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 02 1.0 0.5 1.0 0 0.5 0.5 0 y0.5 0 0 0.57.0 -0.5 -0.5 -1.0 -1.0 -0.50X (a最大离散距离1(En=0.3,He=0.01)》 (b)最大离散距离2(En=0.3,He=0.033) 0.9 03 01 0.5 0 0.51.0 0.5 Y-0.5 -050 0 X -1.0 -0.5 (c)最大离散距离3(En=0.3.He=0.049) (d)最大离散距离4(En=0.15.He=0.049)