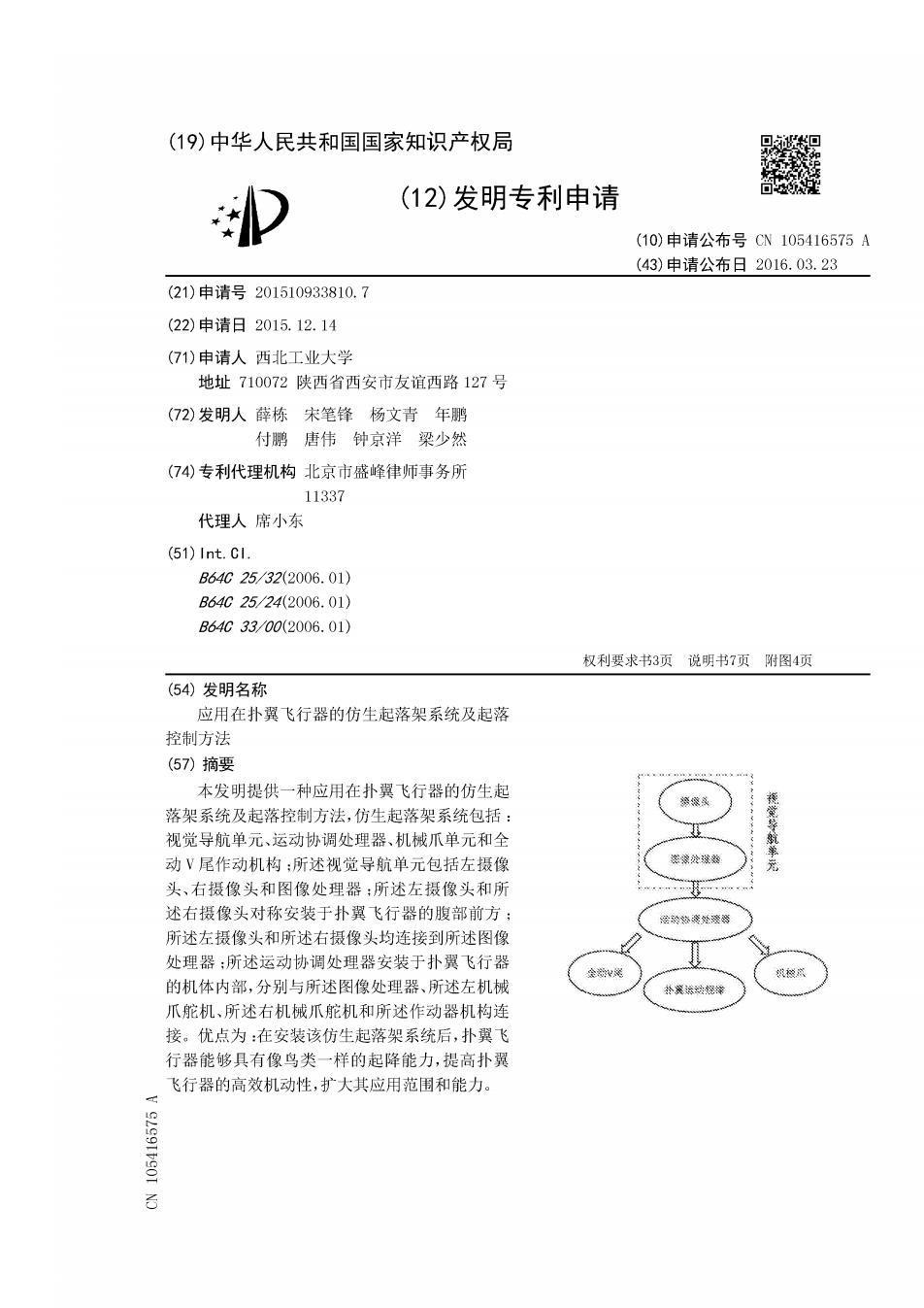
(19)中华人民共和国国家知识产权局 ▣▣ (12)发明专利申请 (10)申请公布号CN105416575A (43)申请公布日2016.03.23 (21)申请号201510933810.7 (22)申请日2015.12.14 (71)申请人西北工业大学 地址710072陕西省西安市友谊西路127号 (72)发明人薛栋宋笔锋杨文青年鹏 付鹏唐伟钟京洋梁少然 (74)专利代理机构北京市盛峰律师事务所 11337 代理人席小东 (51)Int.CI. B64C25/32(2006.01) B6402524(2006.01) B64033/002006.01) 权利要求书3页说明书7页附图4页 (54)发明名称 应用在扑翼飞行器的仿生起落架系统及起落 控制方法 (57)摘要 本发明提供一种应用在扑翼飞行器的仿生起 等袋或 落架系统及起落控制方法,仿生起落架系统包括: 视觉导航单元、运动协调处理器、机械爪单元和全 密裳波源效 我觉导號单元 动V尾作动机构:所述视觉导航单元包括左摄像 头、右摄像头和图像处理器:所述左摄像头和所 述右摄像头对称安装于扑翼飞行器的腹部前方; 溶动游藏处漂器 所述左摄像头和所述右摄像头均连接到所述图像 处理器:所述运动协调处理器安装于扑翼飞行器 械税成 的机体内部,分别与所述图像处理器、所述左机械 补赛端被深 爪舵机、所述右机械爪舵机和所述作动器机构连 接。优点为:在安装该仿生起落架系统后,扑翼飞 行器能够具有像鸟类一样的起降能力,提高扑翼 飞行器的高效机动性,扩大其应用范围和能力。 石
CN105416575A 权利要求书 1/3页 1.一种应用在扑翼飞行器的仿生起落架系统,其特征在于,包括:视觉导航单元、运动 协调处理器、机械爪单元和全动V尾作动机构; 其中,所述视觉导航单元包括左摄像头、右摄像头和图像处理器:所述左摄像头和所述 右摄像头对称安装于扑翼飞行器的腹部前方:所述左摄像头和所述右摄像头均连接到所述 图像处理器; 所述机械爪单元包括:左机械爪、右机械爪、左机械爪舵机和右机械爪舵机:所述左机 械爪和所述右机械爪横向对称安装于扑翼飞行器重心位置:所述左机械爪舵机和所述右机 械爪舵机安装于扑翼飞行器的机体内部;所述左机械爪舵机和所述左机械爪联动,用于控 制所述左机械爪的开合动作:所述右机械爪舵机和所述右机械爪联动,用于控制所述右机 械爪的开合动作: 所述全动V尾作动机构包括:全动V尾和作动器机构;所述全动V尾安装于机体尾部, 所述作动器机构安装于机体内部,所述作动器机构用于控制所述全动V尾进行水平方向转 动或俯仰方向转动,进而平衡扑翼飞行器降落或起飞时带来的转动力矩; 所述运动协调处理器安装于扑翼飞行器的机体内部,分别与所述图像处理器、所述左 机械爪舵机、所述右机械爪舵机和所述作动器机构连接。 2.根据权利要求1所述的应用在扑翼飞行器的仿生起落架系统,其特征在于,所述左 机械爪和所述右机械爪为对称结构: 对于所述左机械爪,为铰链四杆机构,包括:安装基板(2A)、推杆(2B)、左摇杆(2C)、右 摇杆(2D)、左钩爪(2E)和右钩爪(2F); 所述安装基板(2A)垂直设置,包括一体成形的竖向基板(2A-1)、左吊耳(2A-2)和右吊 耳(2A-3);所述竖向基板(2A-1)的顶端固定在机体底部重心位置:所述竖向基板(2A-1) 的底部对称设置所述左吊耳(2A-2)和所述右吊耳(2A-3); 所述左钩爪(2E)和所述右钩爪(2F)的中部分别铰接在所述左吊耳(2A-2)和所述右 吊耳(2A-3)上,将左钩爪(2E)和左吊耳(2A-2)的铰接点记为F1,将右钩爪(2F)和右吊 耳(2A-3)的铰接点记为F2:所述左钩爪(2E)和所述右钩爪(2F)的顶端分别与所述左摇 杆(2C)和所述右摇杆(2D)的底端铰接,将左钩爪(2E)和左摇杆(2C)的铰接点记为F3,将 右钩爪(2F)和右摇杆(2D)的铰接点记为F4:所述左摇杆(2C)和所述右摇杆(2D)的顶端 均铰接到所述推杆(2B)的底端,将所述左摇杆(2C)、所述右摇杆(2D)和所述推杆(2B)的 共同铰接点记为F5;所述推杆(2B)的顶端与所述左机械爪舵机联动;通过所述左机械爪舵 机驱动所述推杆(2B)进行升降动作,进而控制所述左钩爪(2E)和所述右钩爪(2F)进行开 合动作。 3.根据权利要求2所述的应用在扑翼飞行器的仿生起落架系统,其特征在于,铰接点 F1到铰接点F2的距离为48mm:铰接点F2到右钩爪(2F)末端点的距离为工作臂长度,值为 35mm:铰接点F3到铰接点F1的距离为传动臂长度,值为17mm:铰接点F5到铰接点F4的距 离为30mm。 4.根据权利要求1所述的应用在扑翼飞行器的仿生起落架系统,其特征在于,所述作 动器机构包括固定设置于机体内部的机身隔框(3A),在所述机身隔框(3A)的腔体设置有 水平转动机架(3D),所述水平转动机架(3D)通过水平转动机架转轴(3E)与所述机身隔框 (3A)可转动连接:在所述机身隔框(3A)的腔体内部还设置有水平转动舵机(3F),所述水平 2
CN105416575A 权利要求书 2/3页 转动舵机(3F)的摇臂与水平连杆的一端铰接,所述水平连杆的另一端与所述水平转动机 架(3D)铰接,所述水平转动舵机(3F)驱动所述水平连杆动作,进而驱动所述水平转动机架 (3D)绕所述水平转动机架转轴(3E)进行水平方向转动: 在所述水平转动机架(3D)的架体内部设置有俯仰转轴(3H),所述俯仰转轴(3H)的两 端与所述水平转动机架(3D)的左右侧板较接:全动V尾摇杆(3G)的尾端安装全动V尾,所 述全动V尾摇杆(3G)的顶端固定到所述俯仰转轴(3H):另外,所述俯仰转轴(3)还固定 连接有与所述俯仰转轴(3H)垂直的俯仰转轴连杆(3C); 在所述水平转动机架(3D)上固定安装有俯仰转动舵机(3B),所述俯仰转动舵机(3B) 的摇臂与俯仰连杆的一端铰接,所述俯仰连杆的另一端与所述俯仰转轴连杆(3C)铰接,所 述俯仰转动舵机(3B)驱动所述俯仰连杆进行俯仰动作,进而使所述俯仰转轴(3)转动,当 所述俯仰转轴(3)转动时,带动所述全动V尾摇杆(3G)进行俯仰方向的运动: 5.一种扑翼飞行器的起落控制方法,其特征在于,包括以下步骤: 步骤1,当扑翼飞行器需要降落时,视觉导航单元的左摄像头和右摄像头采集环境图 像,并将采集到的环境图传输给图像处理器: 步骤2,图像处理器对环境进行三维重建,确定降落目标的位置和形状,并将确定的降 落目标的位置和形状传输给运动协调处理器; 步骤3,所述运动协调处理器对降落目标的位置和形状进行综合解析,计算得到扑翼的 扑动频率、扑动幅度、对机械爪单元的收拢控制命令以及对全动V尾的摆动控制命令: 步骤4,通过对扑翼的扑动频率和扑动幅度进行控制,实现向降落日标的靠近,并且,在 靠近降落目标的过程中,一方面,向全动V尾作动机构发送摆动控制命令,实现全动V尾的 水平方向转动或俯仰方向转动,进而平衡扑翼飞行器降落时带来的转动力矩; 另一方面,向机械爪单元发送收拢控制命令,机械爪单元在接收到收拢控制命令后,左 机械爪舵机驱动左机械爪进行收拢动作,同时,右机械爪舵机驱动右机械爪进行收拢动作, 最终使左机械爪和右机械爪合拢而夹紧降落目标,实现平稳降落; 步骤5,当扑翼飞行器需要起飞时,一方面,运动协调处理器向机械爪单元发送张开控 制命令,机械爪单元在接收到张开控制命令后,左机械爪舵机驱动左机械爪进行张开动作, 同时,右机械爪舵机驱动右机械爪进行张开动作,最终使左机械爪和右机械爪张开而释放 降落目标:同时,通过对扑翼的扑动频率、扑动幅度、全动V尾的摆动方式进而控制,最终实 现平稳起飞。 6.根据权利要求5所述的应用在扑翼飞行器的仿生起落架系统,其特征在于,步骤4 中,实现全动V尾的水平方向转动或俯仰方向转动,具体过程为: 通过以下方式控制全动V尾的水平方向转动:由于全动V尾通过全动V尾摇杆(3G)固 定于俯仰转轴(3H),俯仰转轴(3H)铰接在水平转动机架(3D):因此,水平转动舵机(3F)通 过水平连杆驱动水平转动机架(3D)绕水平转动机架转轴(3E)进行水平方向转动时,可带 动全动V尾摇杆(3G)进行水平方向转动,最终带动全动V尾进行水平方向转动: 通过以下方式控制全动V尾的俯仰方向转动:俯仰转动舵机(3B)驱动俯仰连杆进行俯 仰动作,进而使俯仰转轴(3)转动,当俯仰转轴(3)转动时,带动述全动V尾摇杆(3G)进 行俯仰方向的运动,最终带动全动V尾进行俯仰方向转动。 7.根据权利要求5所述的应用在扑翼飞行器的仿生起落架系统,其特征在于,步骤5 3

CN105416575A 权利要求书 3/3页 中,机械爪单元进行收拢动作,具体过程为: 机械爪单元的左机械爪和右机械爪同步进行收拢动作,其中,对于左机械爪,进行收拢 动作的具体过程为: 左机械爪舵机驱动推杆(2B)向上动作,推杆(2B)拉动左摇杆(2C)和右摇杆(2D)向 上运动,进而同步带动左钩爪(2E)和右钩爪(2F)分别绕铰接点F1和铰接点F2进行相向 运动,最终使左钩爪(2E)和右钩爪(2F)的尖部接触并夹紧降落目标
CN105416575A 说明书 1/7页 应用在扑翼飞行器的仿生起落架系统及起落控制方法 技术领域 [0001] 本发明属于扑翼飞行器设计技术领域,具体涉及一种应用在扑翼飞行器的仿生起 落架系统及起落控制方法。 背景技术 [0002]扑翼飞行器是一种模仿鸟类飞行的新概念飞行器,具有体积小、重量轻、使用灵 活、效率高等优势,如果搭载传感器和相关的数据传输和飞行控制系统,形成微型扑翼无人 机平台,就会具有广阔的应用前景。 [0003]围绕这一课题,各国已研制出可控飞行的扑翼飞行器,其中较成功的包括:美国 Aero Vironment公司与加利福尼亚大学合作的“Microbat”、荷兰Delft大学的“Delf1y”, 以及西北工业大学的“信鸽”扑翼飞行器等,但上述扑翼飞行器普遍采用手抛起飞和机体硬 着落的低效起降方式,无法实现像鸟类一样在狭窄空间(树木枝干或者建筑物顶部等)自 由降落和起飞。 [0004]现有专利大都针对扑翼飞行器的总体布局和扑动机构进行设计,很少有关注像鸟 类一样起降的问题。 [0005]中国专利“一种复合扑动的扑翼飞行器”(授权公告号CN102249001A,授权公告 日2011年11月23日)公开了一种复合扑动的扑翼飞行器,包含机身、扑翼和尾翼,扑翼驱 动机构将旋转动力装置的转动转化为摇臂的上下往复扑动:扑翼具有位于前缘的主梁和位 于主梁后方的辅助梁,主梁根部与扑翼驱动机构的摇臂上的盲孔插接,辅助梁根部与机身 上的锁扣装置铰接,固接于机身上的限位杆与机身对称平面平行,穿过扑翼辅助梁根部的 连接孔,扣入固接于机身上的锁扣。该发明虽然针对扑翼飞行器提供了一种具有较高气动 效率,较大的有效载荷的总体设计方案,但仍然采用手抛起飞和机体硬着落的低效起降方 式。 [0006]可见,目前己公开的各类扑翼飞行器,由于采用手抛起飞和机体硬着落的低效起 降方式,未能将扑翼飞行器的高效机动性充分发挥出来,严重制约着扑翼飞行器的应用前 景。 发明内容 [0007] 针对现有技术存在的缺陷,本发明提供一种应用在扑翼飞行器的仿生起落架系统 及起落控制方法,在安装该仿生起落架系统后,扑翼飞行器能够具有像鸟类一样的起降能 力,提高扑翼飞行器的高效机动性,扩大其应用范围和能力。 [0008]本发明采用的技术方案如下: [0009]本发明提供一种应用在扑翼飞行器的仿生起落架系统,包括:视觉导航单元、运动 协调处理器、机械爪单元和全动V尾作动机构: [0010]其中,所述视觉导航单元包括左摄像头、右摄像头和图像处理器;所述左摄像头和 所述右摄像头对称安装于扑翼飞行器的腹部前方:所述左摄像头和所述右摄像头均连接到 5