对称操作的矩阵表示 1.坐标变换 (4)反映对称 g反映操作6(即G,)】 100 o(y)= 010 00-1 g反映操作6,(包含z轴,与o_夹角为β) P-→(x=rsin cosp,y=rsin0sinp,rcosθ) P>x=rsinecos(2B-p) -.p 会B1 =rsine(cos2Bcoso+sin2Bsino) =xcos28+ysin28 cos2B sin28 0 y=rsinesin(28-0) 0y= sin28 -cos2B 0 =rsine(sin2Bcoso-cos2Bsino) 0 0 6 z=2
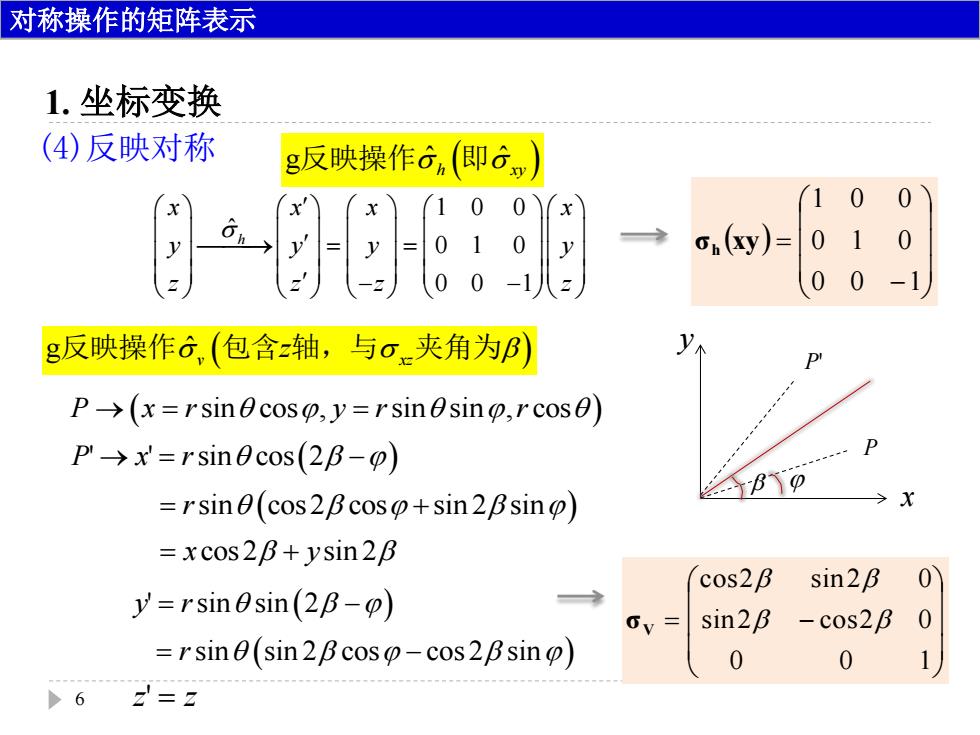
1. 坐标变换 6 对称操作的矩阵表示 g反映操作 ˆ v xz 包含z轴,与 夹角为 g反映操作 ˆ h xy 即 ˆ 1 0 0 ˆ 0 1 0 0 0 1 h x x x x y y y y z z z z 0 0 1 0 1 0 1 0 0 σh xy x y P P' P x r y r r sin cos , sin sin , cos ' ' sin cos 2 sin cos 2 cos sin 2 sin cos 2 sin 2 P x r r x y ' sin sin 2 sin sin 2 cos cos 2 sin y r r z z ' 0 0 1 sin2 cos2 0 cos2 sin2 0 σV (4)反映对称

对称操作的矩阵表示 1.坐标变换 (5)像转动 首先,的矩阵表示为RR2 日月月n日 因此,S,=6,Cn的矩阵表示为o.Cn 2π 2π 2π -sin 2π -sin 0 cos 0 n n 100 n n 2 Sn(②=Cch= Sin 27 0 0 sin 2π 2π cos coS 0 n n 0 0 0 0 -1 0 0 >7
1. 坐标变换 7 对称操作的矩阵表示 1 2 R R ˆ ˆ 首先, 的矩阵表示为R R1 2 1 2 ˆ ˆ x x x x x x R R y y y y y y z z z z z z R R R R 1 2 2 1 ˆ ˆ ˆ n h n 因此,S C = 的矩阵表示为σh n C 2 2 2 2 cos sin 0 cos sin 0 1 0 0 2 2 2 2 sin cos 0 0 1 0 sin cos 0 0 0 1 0 0 1 0 0 1 n n n n n n n n S (z) C n n h σ (5)像转动