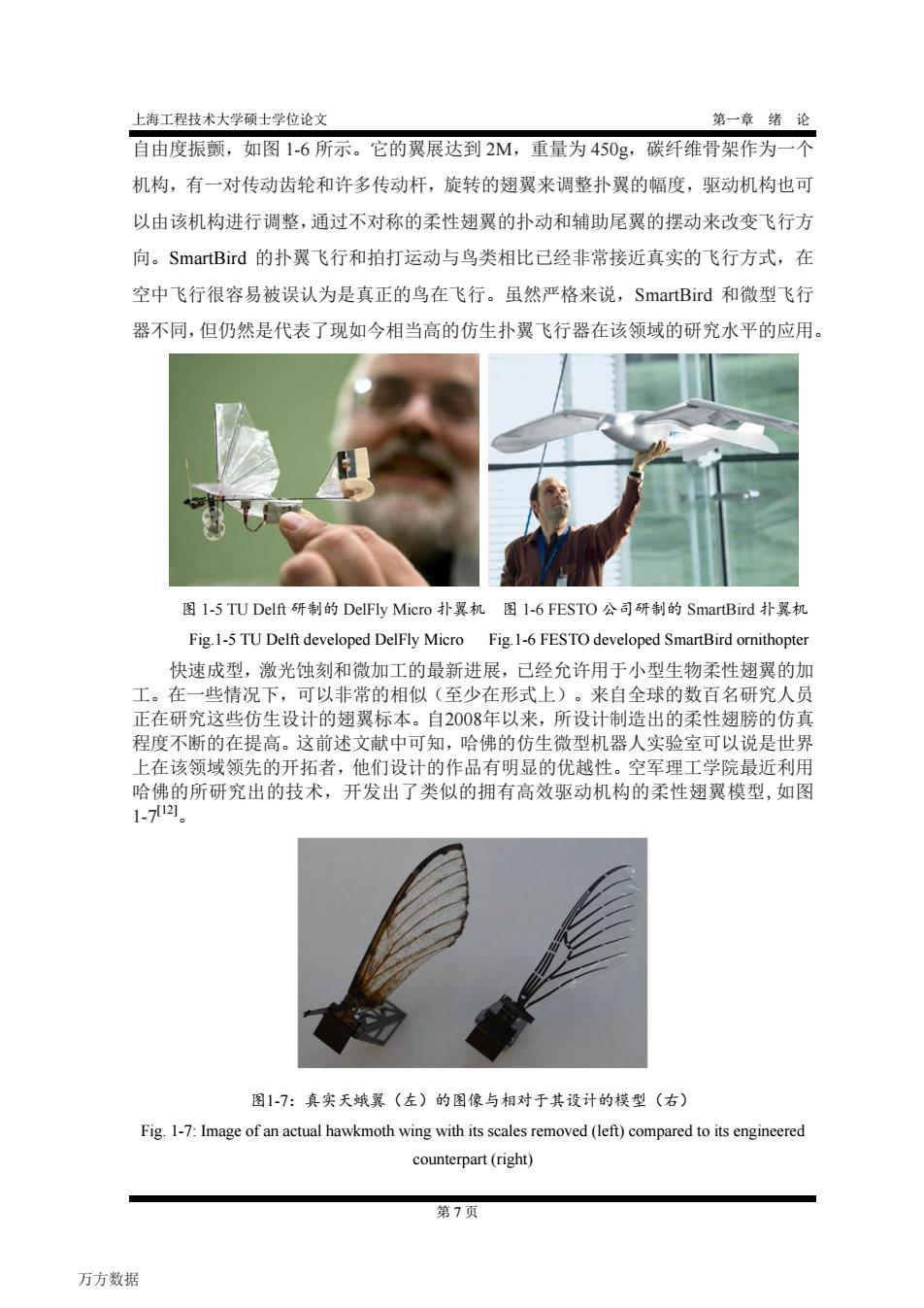
上海工程技术大学硕士学位论文 第一章绪论 自由度振颤,如图1-6所示。它的翼展达到2M,重量为450g,碳纤维骨架作为一个 机构,有一对传动齿轮和许多传动杆,旋转的翅翼来调整扑翼的幅度,驱动机构也可 以由该机构进行调整,通过不对称的柔性翅翼的扑动和辅助尾翼的摆动来改变飞行方 向。SmartBird的扑翼飞行和拍打运动与鸟类相比已经非常接近真实的飞行方式,在 空中飞行很容易被误认为是真正的鸟在飞行。虽然严格来说,SmartBird和微型飞行 器不同,但仍然是代表了现如今相当高的仿生扑翼飞行器在该领域的研究水平的应用。 图l-5 TU Delft研制的DelFly Micro扑翼机图l-6 FESTO公司研制的SmartBird扑翼机 Fig.1-5 TU Delft developed DelFly Micro Fig.1-6 FESTO developed SmartBird ornithopter 快速成型,激光蚀刻和微加工的最新进展,已经允许用于小型生物柔性翅翼的加 工。在一些情况下,可以非常的相似(至少在形式上)。来自全球的数百名研究人员 正在研究这些仿生设计的翅翼标本。自2008年以来,所设计制造出的柔性翅膀的仿真 程度不断的在提高。这前述文献中可知,哈佛的仿生微型机器人实验室可以说是世界 上在该领域领先的开拓者,他们设计的作品有明显的优越性。空军理工学院最近利用 哈佛的所研究出的技术,开发出了类似的拥有高效驱动机构的柔性翅翼模型,如图 1-712。 图1-7:真实天蛾翼(左)的图像与相对于其设计的模型(右) Fig.1-7:Image of an actual hawkmoth wing with its scales removed(left)compared to its engineered counterpart(right) 第7页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 7 页 自由度振颤,如图 1-6 所示。它的翼展达到 2M,重量为 450g,碳纤维骨架作为一个 机构,有一对传动齿轮和许多传动杆,旋转的翅翼来调整扑翼的幅度,驱动机构也可 以由该机构进行调整,通过不对称的柔性翅翼的扑动和辅助尾翼的摆动来改变飞行方 向。SmartBird 的扑翼飞行和拍打运动与鸟类相比已经非常接近真实的飞行方式,在 空中飞行很容易被误认为是真正的鸟在飞行。虽然严格来说,SmartBird 和微型飞行 器不同,但仍然是代表了现如今相当高的仿生扑翼飞行器在该领域的研究水平的应用。 图 1-5 TU Delft 研制的 DelFly Micro 扑翼机 图 1-6 FESTO 公司研制的 SmartBird 扑翼机 Fig.1-5 TU Delft developed DelFly Micro Fig.1-6 FESTO developed SmartBird ornithopter 快速成型,激光蚀刻和微加工的最新进展,已经允许用于小型生物柔性翅翼的加 工。在一些情况下,可以非常的相似(至少在形式上)。来自全球的数百名研究人员 正在研究这些仿生设计的翅翼标本。自2008年以来,所设计制造出的柔性翅膀的仿真 程度不断的在提高。这前述文献中可知,哈佛的仿生微型机器人实验室可以说是世界 上在该领域领先的开拓者,他们设计的作品有明显的优越性。空军理工学院最近利用 哈佛的所研究出的技术,开发出了类似的拥有高效驱动机构的柔性翅翼模型,如图 1-7 [12]。 图1-7:真实天蛾翼(左)的图像与相对于其设计的模型(右) Fig. 1-7: Image of an actual hawkmoth wing with its scales removed (left) compared to its engineered counterpart (right) 万方数据
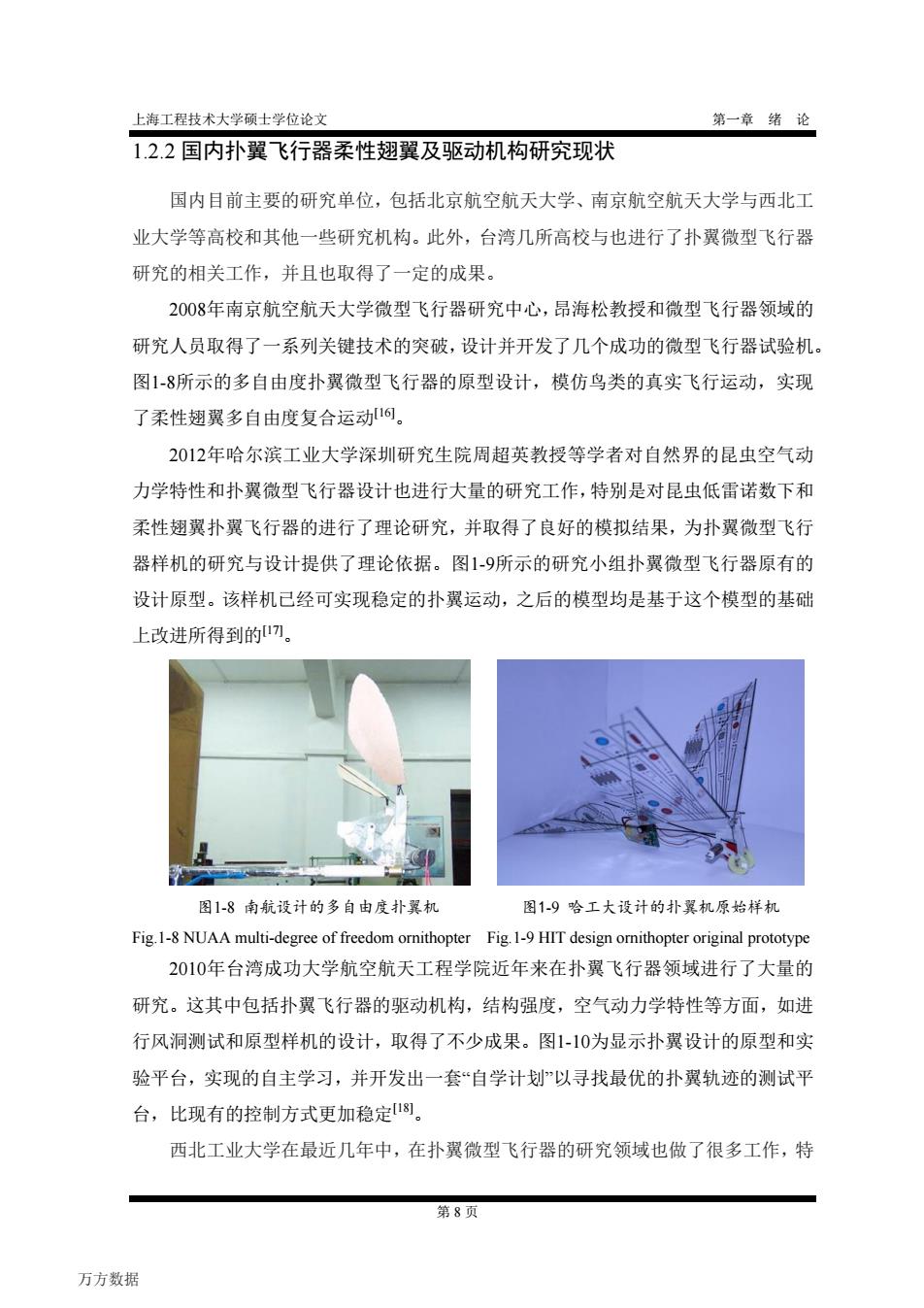
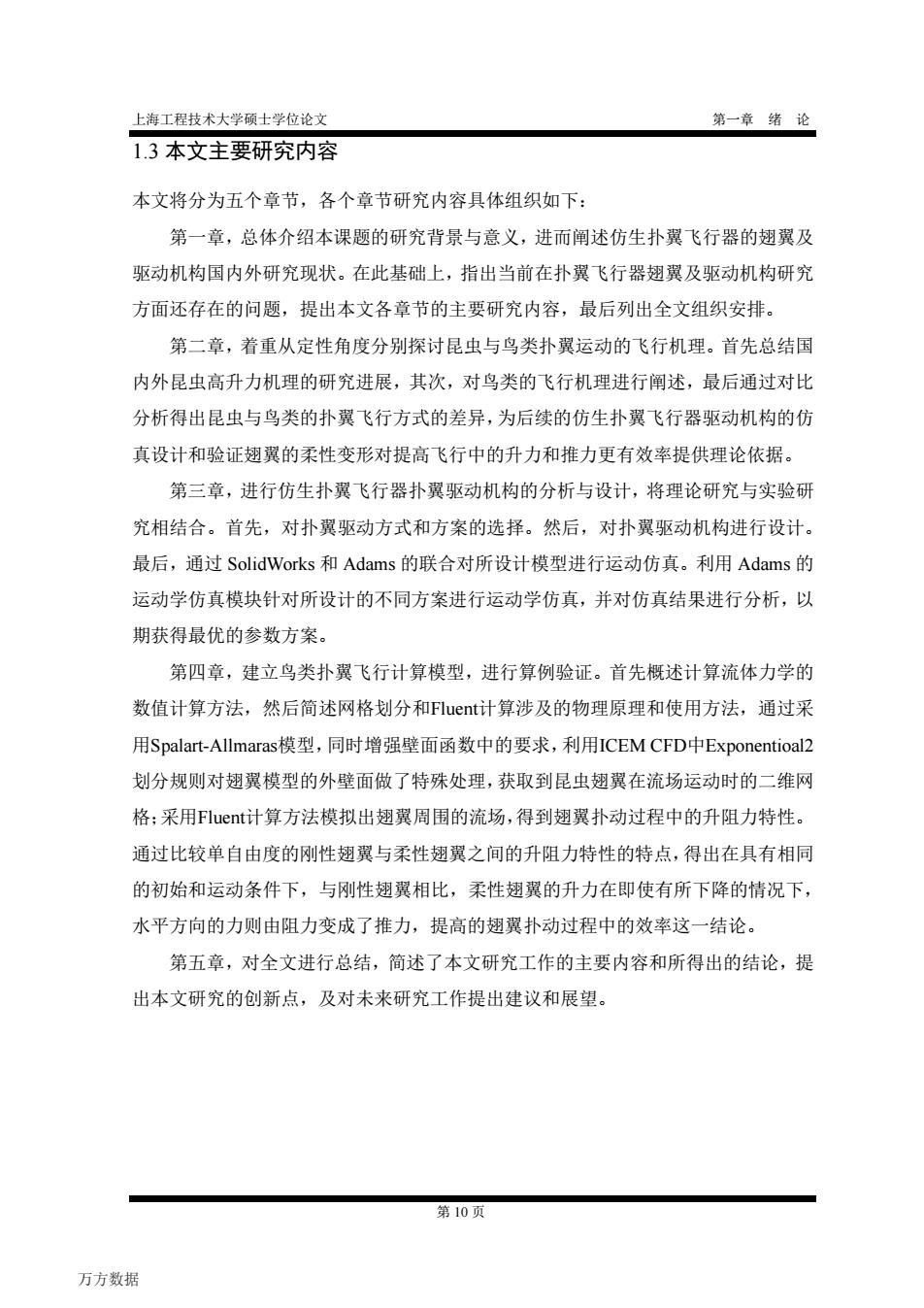
上海工程技术大学硕士学位论文 第一章绪论 1.2.2国内扑翼飞行器柔性翅翼及驱动机构研究现状 国内目前主要的研究单位,包括北京航空航天大学、南京航空航天大学与西北工 业大学等高校和其他一些研究机构。此外,台湾几所高校与也进行了扑翼微型飞行器 研究的相关工作,并且也取得了一定的成果。 2008年南京航空航天大学微型飞行器研究中心,昂海松教授和微型飞行器领域的 研究人员取得了一系列关键技术的突破,设计并开发了几个成功的微型飞行器试验机。 图1-8所示的多自由度扑翼微型飞行器的原型设计,模仿鸟类的真实飞行运动,实现 了柔性翅翼多自由度复合运动16。 2012年哈尔滨工业大学深圳研究生院周超英教授等学者对自然界的昆虫空气动 力学特性和扑翼微型飞行器设计也进行大量的研究工作,特别是对昆虫低雷诺数下和 柔性翅翼扑翼飞行器的进行了理论研究,并取得了良好的模拟结果,为扑翼微型飞行 器样机的研究与设计提供了理论依据。图1-9所示的研究小组扑翼微型飞行器原有的 设计原型。该样机已经可实现稳定的扑翼运动,之后的模型均是基于这个模型的基础 上改进所得到的刀。 图1-8南航设计的多自由度扑翼机 图1-9哈工大设计的扑翼机原始样机 Fig.1-8 NUAA multi-degree of freedom ornithopter Fig.1-9 HIT design ornithopter original prototype 2010年台湾成功大学航空航天工程学院近年来在扑翼飞行器领域进行了大量的 研究。这其中包括扑翼飞行器的驱动机构,结构强度,空气动力学特性等方面,如进 行风洞测试和原型样机的设计,取得了不少成果。图1-10为显示扑翼设计的原型和实 验平台,实现的自主学习,并开发出一套“自学计划以寻找最优的扑翼轨迹的测试平 台,比现有的控制方式更加稳定。 西北工业大学在最近几年中,在扑翼微型飞行器的研究领域也做了很多工作,特 第8页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 8 页 1.2.2 国内扑翼飞行器柔性翅翼及驱动机构研究现状 国内目前主要的研究单位,包括北京航空航天大学、南京航空航天大学与西北工 业大学等高校和其他一些研究机构。此外,台湾几所高校与也进行了扑翼微型飞行器 研究的相关工作,并且也取得了一定的成果。 2008年南京航空航天大学微型飞行器研究中心,昂海松教授和微型飞行器领域的 研究人员取得了一系列关键技术的突破,设计并开发了几个成功的微型飞行器试验机。 图1-8所示的多自由度扑翼微型飞行器的原型设计,模仿鸟类的真实飞行运动,实现 了柔性翅翼多自由度复合运动[16]。 2012年哈尔滨工业大学深圳研究生院周超英教授等学者对自然界的昆虫空气动 力学特性和扑翼微型飞行器设计也进行大量的研究工作,特别是对昆虫低雷诺数下和 柔性翅翼扑翼飞行器的进行了理论研究,并取得了良好的模拟结果,为扑翼微型飞行 器样机的研究与设计提供了理论依据。图1-9所示的研究小组扑翼微型飞行器原有的 设计原型。该样机已经可实现稳定的扑翼运动,之后的模型均是基于这个模型的基础 上改进所得到的[17]。 图1-8 南航设计的多自由度扑翼机 图1-9 哈工大设计的扑翼机原始样机 Fig.1-8 NUAA multi-degree of freedom ornithopter Fig.1-9 HIT design ornithopter original prototype 2010年台湾成功大学航空航天工程学院近年来在扑翼飞行器领域进行了大量的 研究。这其中包括扑翼飞行器的驱动机构,结构强度,空气动力学特性等方面,如进 行风洞测试和原型样机的设计,取得了不少成果。图1-10为显示扑翼设计的原型和实 验平台,实现的自主学习,并开发出一套“自学计划”以寻找最优的扑翼轨迹的测试平 台,比现有的控制方式更加稳定[18]。 西北工业大学在最近几年中,在扑翼微型飞行器的研究领域也做了很多工作,特 万方数据

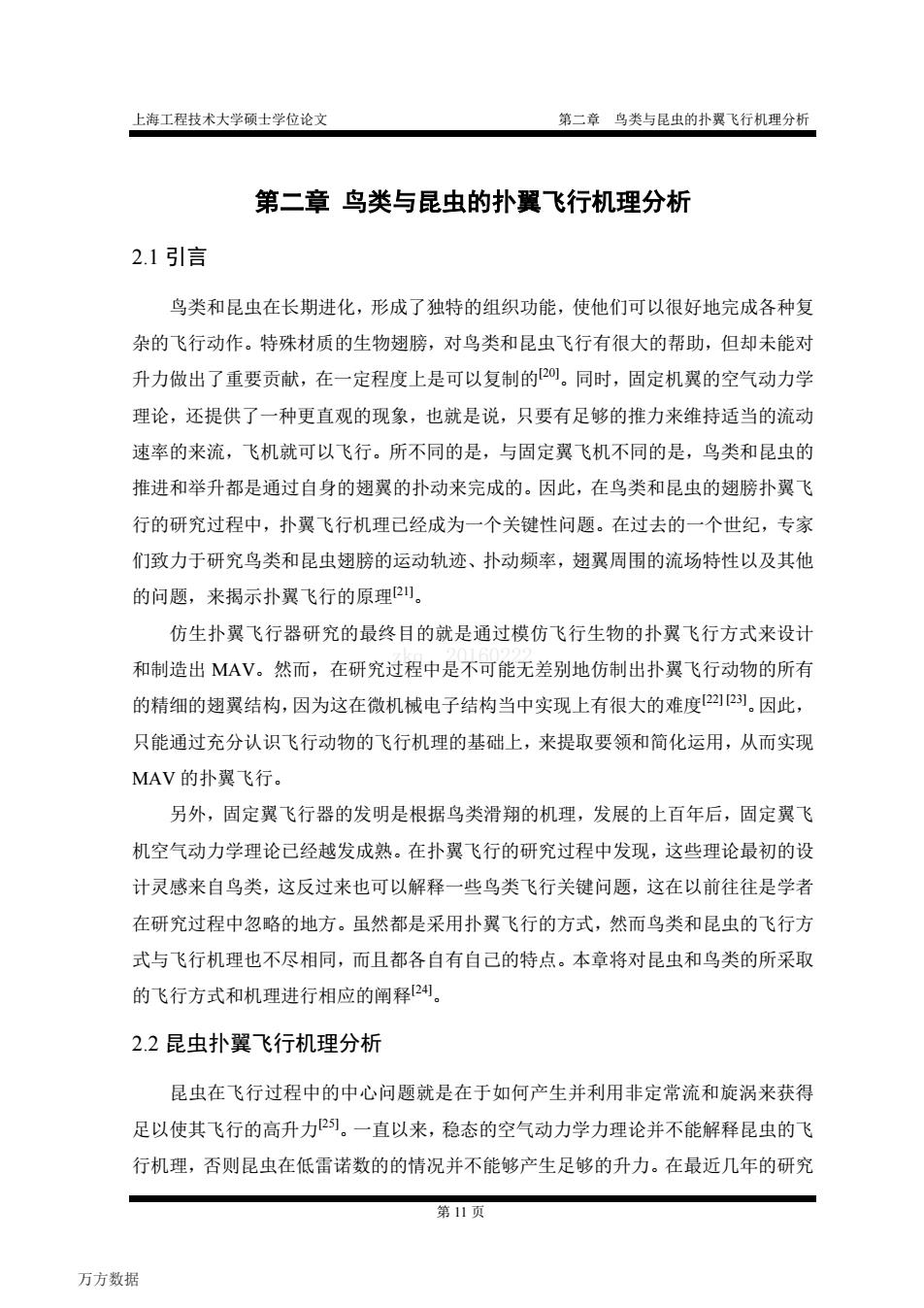
上海工程技术大学硕士学位论文 第一章绪论 别是在驱动机构,数值模拟和在低雷诺数风洞试验方面取得了丰硕的成果。2010年11 月首次亮相“第八届珠海航展”的ASN-211就是该机的扑翼微型飞行器模型9叨,已经可 以达到自主飞行,它的翼展达到600毫米,拥有220g的最大起飞重量,6米/秒-10米/ 秒最大飞行速度,可以达到200米的高度。图1-11中所示为该飞行器的样机模型。 图1-10成功大学设计的扑翼平台 图1-11珠海航展亮相的ASN-211扑翼机 Fig.1-10Kung University ornithopter design platform Fig.1-11 Zhuhai debut ASN-211 ornithopter 1.2.3国内外柔性翅翼及驱动机构研究现状分析 模仿昆虫和鸟类扑翼飞行的研究表明,光对扑翼柔性翅翼及驱动机构的研究是不 够的,还需要涉及诸如扑翼飞行的运动学,扑翼飞行的空气动力学,和柔性翅翼结构 灵活性等诸多方面。相信所有的因素加在一起会对扑翼飞行方式的产生很大性能影响, 但是目前的研究结果只是有限的了解由气动力产生的扑翼飞行机理。对其中的柔性翅 翼及驱动机构的几何参数,结构,空气动力学,运动学和定量分析需要涉及的高效的 扑翼飞行器的设计,仍然很缺乏深入的研究。 依据上述所介绍的国内外扑翼飞行器的研究进展不难看出: (1)目前大多数国内外的研究人员研制的扑翼飞行器驱动机构多集中于单自由度, 两个及以上的自由度的驱动机构仍未有很大突破,需要继续研究出稳定性更强,效率 更高的多自由度扑翼驱动机构: (2)翅翼部分大多采取塑料合成材料,虽然可以实现柔性变形,但是无法精确获得 其变形量,柔性翅翼的变形控制技术仍需进一步的研究和发展。 第9页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 9 页 别是在驱动机构,数值模拟和在低雷诺数风洞试验方面取得了丰硕的成果。2010年11 月首次亮相“第八届珠海航展”的ASN-211就是该机的扑翼微型飞行器模型[19],已经可 以达到自主飞行,它的翼展达到600毫米,拥有220g的最大起飞重量,6米/秒--10米/ 秒最大飞行速度,可以达到200米的高度。图1-11中所示为该飞行器的样机模型。 图1-10 成功大学设计的扑翼平台 图1-11 珠海航展亮相的ASN-211扑翼机 Fig.1-10Kung University ornithopter design platform Fig.1-11 Zhuhai debut ASN-211 ornithopter 1.2.3 国内外柔性翅翼及驱动机构研究现状分析 模仿昆虫和鸟类扑翼飞行的研究表明,光对扑翼柔性翅翼及驱动机构的研究是不 够的,还需要涉及诸如扑翼飞行的运动学,扑翼飞行的空气动力学,和柔性翅翼结构 灵活性等诸多方面。相信所有的因素加在一起会对扑翼飞行方式的产生很大性能影响, 但是目前的研究结果只是有限的了解由气动力产生的扑翼飞行机理。对其中的柔性翅 翼及驱动机构的几何参数,结构,空气动力学,运动学和定量分析需要涉及的高效的 扑翼飞行器的设计,仍然很缺乏深入的研究。 依据上述所介绍的国内外扑翼飞行器的研究进展不难看出: (1)目前大多数国内外的研究人员研制的扑翼飞行器驱动机构多集中于单自由度, 两个及以上的自由度的驱动机构仍未有很大突破,需要继续研究出稳定性更强,效率 更高的多自由度扑翼驱动机构; (2)翅翼部分大多采取塑料合成材料,虽然可以实现柔性变形,但是无法精确获得 其变形量,柔性翅翼的变形控制技术仍需进一步的研究和发展。 万方数据
上海工程技术大学硕士学位论文 第一章绪论 1.3本文主要研究内容 本文将分为五个章节,各个章节研究内容具体组织如下: 第一章,总体介绍本课题的研究背景与意义,进而阐述仿生扑翼飞行器的翅翼及 驱动机构国内外研究现状。在此基础上,指出当前在扑翼飞行器翅翼及驱动机构研究 方面还存在的问题,提出本文各章节的主要研究内容,最后列出全文组织安排。 第二章,着重从定性角度分别探讨昆虫与鸟类扑翼运动的飞行机理。首先总结国 内外昆虫高升力机理的研究进展,其次,对鸟类的飞行机理进行阐述,最后通过对比 分析得出昆虫与鸟类的扑翼飞行方式的差异,为后续的仿生扑翼飞行器驱动机构的仿 真设计和验证翅翼的柔性变形对提高飞行中的升力和推力更有效率提供理论依据。 第三章,进行仿生扑翼飞行器扑翼驱动机构的分析与设计,将理论研究与实验研 究相结合。首先,对扑翼驱动方式和方案的选择。然后,对扑翼驱动机构进行设计。 最后,通过SolidWorks和Adams的联合对所设计模型进行运动仿真。利用Adams的 运动学仿真模块针对所设计的不同方案进行运动学仿真,并对仿真结果进行分析,以 期获得最优的参数方案。 第四章,建立鸟类扑翼飞行计算模型,进行算例验证。首先概述计算流体力学的 数值计算方法,然后简述网格划分和Fluent计算涉及的物理原理和使用方法,通过采 用Spalart-.Allmaras模型,同时增强壁面函数中的要求,利用ICEM CFD中Exponentioal2 划分规则对翅翼模型的外壁面做了特殊处理,获取到昆虫翅翼在流场运动时的二维网 格:采用Fluent计算方法模拟出翅翼周围的流场,得到翅翼扑动过程中的升阻力特性。 通过比较单自由度的刚性翅翼与柔性翅翼之间的升阻力特性的特点,得出在具有相同 的初始和运动条件下,与刚性翅翼相比,柔性翅翼的升力在即使有所下降的情况下, 水平方向的力则由阻力变成了推力,提高的翅翼扑动过程中的效率这一结论。 第五章,对全文进行总结,简述了本文研究工作的主要内容和所得出的结论,提 出本文研究的创新点,及对未来研究工作提出建议和展望。 第10页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 10 页 1.3 本文主要研究内容 本文将分为五个章节,各个章节研究内容具体组织如下: 第一章,总体介绍本课题的研究背景与意义,进而阐述仿生扑翼飞行器的翅翼及 驱动机构国内外研究现状。在此基础上,指出当前在扑翼飞行器翅翼及驱动机构研究 方面还存在的问题,提出本文各章节的主要研究内容,最后列出全文组织安排。 第二章,着重从定性角度分别探讨昆虫与鸟类扑翼运动的飞行机理。首先总结国 内外昆虫高升力机理的研究进展,其次,对鸟类的飞行机理进行阐述,最后通过对比 分析得出昆虫与鸟类的扑翼飞行方式的差异,为后续的仿生扑翼飞行器驱动机构的仿 真设计和验证翅翼的柔性变形对提高飞行中的升力和推力更有效率提供理论依据。 第三章,进行仿生扑翼飞行器扑翼驱动机构的分析与设计,将理论研究与实验研 究相结合。首先,对扑翼驱动方式和方案的选择。然后,对扑翼驱动机构进行设计。 最后,通过 SolidWorks 和 Adams 的联合对所设计模型进行运动仿真。利用 Adams 的 运动学仿真模块针对所设计的不同方案进行运动学仿真,并对仿真结果进行分析,以 期获得最优的参数方案。 第四章,建立鸟类扑翼飞行计算模型,进行算例验证。首先概述计算流体力学的 数值计算方法,然后简述网格划分和Fluent计算涉及的物理原理和使用方法,通过采 用Spalart-Allmaras模型,同时增强壁面函数中的要求,利用ICEM CFD中Exponentioal2 划分规则对翅翼模型的外壁面做了特殊处理,获取到昆虫翅翼在流场运动时的二维网 格;采用Fluent计算方法模拟出翅翼周围的流场,得到翅翼扑动过程中的升阻力特性。 通过比较单自由度的刚性翅翼与柔性翅翼之间的升阻力特性的特点,得出在具有相同 的初始和运动条件下,与刚性翅翼相比,柔性翅翼的升力在即使有所下降的情况下, 水平方向的力则由阻力变成了推力,提高的翅翼扑动过程中的效率这一结论。 第五章,对全文进行总结,简述了本文研究工作的主要内容和所得出的结论,提 出本文研究的创新点,及对未来研究工作提出建议和展望。 万方数据
上海工程技术大学硕士学位论文 第二章鸟类与昆虫的扑翼飞行机理分析 第二章鸟类与昆虫的扑翼飞行机理分析 2.1引言 鸟类和昆虫在长期进化,形成了独特的组织功能,使他们可以很好地完成各种复 杂的飞行动作。特殊材质的生物翅膀,对鸟类和昆虫飞行有很大的帮助,但却未能对 升力做出了重要贡献,在一定程度上是可以复制的20。同时,固定机翼的空气动力学 理论,还提供了一种更直观的现象,也就是说,只要有足够的推力来维持适当的流动 速率的来流,飞机就可以飞行。所不同的是,与固定翼飞机不同的是,鸟类和昆虫的 推进和举升都是通过自身的翅翼的扑动来完成的。因此,在鸟类和昆虫的翅膀扑翼飞 行的研究过程中,扑翼飞行机理已经成为一个关键性问题。在过去的一个世纪,专家 们致力于研究鸟类和昆虫翅膀的运动轨迹、扑动频率,翅翼周围的流场特性以及其他 的问题,来揭示扑翼飞行的原理2。 仿生扑翼飞行器研究的最终目的就是通过模仿飞行生物的扑翼飞行方式来设计 和制造出MAV。然而,在研究过程中是不可能无差别地仿制出扑翼飞行动物的所有 的精细的翅翼结构,因为这在微机械电子结构当中实现上有很大的难度22。因此, 只能通过充分认识飞行动物的飞行机理的基础上,来提取要领和简化运用,从而实现 MAV的扑翼飞行。 另外,固定翼飞行器的发明是根据鸟类滑翔的机理,发展的上百年后,固定翼飞 机空气动力学理论已经越发成熟。在扑翼飞行的研究过程中发现,这些理论最初的设 计灵感来自鸟类,这反过来也可以解释一些鸟类飞行关键问题,这在以前往往是学者 在研究过程中忽略的地方。虽然都是采用扑翼飞行的方式,然而鸟类和昆虫的飞行方 式与飞行机理也不尽相同,而且都各自有自己的特点。本章将对昆虫和鸟类的所采取 的飞行方式和机理进行相应的阐释24。 2.2昆虫扑翼飞行机理分析 昆虫在飞行过程中的中心问题就是在于如何产生并利用非定常流和旋涡来获得 足以使其飞行的高升力2)。一直以来,稳态的空气动力学力理论并不能解释昆虫的飞 行机理,否则昆虫在低雷诺数的的情况并不能够产生足够的升力。在最近几年的研究 第11页 万方数据
上海工程技术大学硕士学位论文 第二章 鸟类与昆虫的扑翼飞行机理分析 第 11 页 第二章 鸟类与昆虫的扑翼飞行机理分析 2.1 引言 鸟类和昆虫在长期进化,形成了独特的组织功能,使他们可以很好地完成各种复 杂的飞行动作。特殊材质的生物翅膀,对鸟类和昆虫飞行有很大的帮助,但却未能对 升力做出了重要贡献,在一定程度上是可以复制的[20]。同时,固定机翼的空气动力学 理论,还提供了一种更直观的现象,也就是说,只要有足够的推力来维持适当的流动 速率的来流,飞机就可以飞行。所不同的是,与固定翼飞机不同的是,鸟类和昆虫的 推进和举升都是通过自身的翅翼的扑动来完成的。因此,在鸟类和昆虫的翅膀扑翼飞 行的研究过程中,扑翼飞行机理已经成为一个关键性问题。在过去的一个世纪,专家 们致力于研究鸟类和昆虫翅膀的运动轨迹、扑动频率,翅翼周围的流场特性以及其他 的问题,来揭示扑翼飞行的原理[21]。 仿生扑翼飞行器研究的最终目的就是通过模仿飞行生物的扑翼飞行方式来设计 和制造出 MAV。然而,在研究过程中是不可能无差别地仿制出扑翼飞行动物的所有 的精细的翅翼结构,因为这在微机械电子结构当中实现上有很大的难度[22] [23]。因此, 只能通过充分认识飞行动物的飞行机理的基础上,来提取要领和简化运用,从而实现 MAV 的扑翼飞行。 另外,固定翼飞行器的发明是根据鸟类滑翔的机理,发展的上百年后,固定翼飞 机空气动力学理论已经越发成熟。在扑翼飞行的研究过程中发现,这些理论最初的设 计灵感来自鸟类,这反过来也可以解释一些鸟类飞行关键问题,这在以前往往是学者 在研究过程中忽略的地方。虽然都是采用扑翼飞行的方式,然而鸟类和昆虫的飞行方 式与飞行机理也不尽相同,而且都各自有自己的特点。本章将对昆虫和鸟类的所采取 的飞行方式和机理进行相应的阐释[24]。 2.2 昆虫扑翼飞行机理分析 昆虫在飞行过程中的中心问题就是在于如何产生并利用非定常流和旋涡来获得 足以使其飞行的高升力[25]。一直以来,稳态的空气动力学力理论并不能解释昆虫的飞 行机理,否则昆虫在低雷诺数的的情况并不能够产生足够的升力。在最近几年的研究 zkq 20160222 万方数据