
上海工程技术大学硕士学位论文 第一章绪论 驱动机构开展了大量的研究工作。鸟类在飞行过程中的有羽翼的变形,蝙蝠的翅翼有 翅骨膜皮,蜻蜓具有高度灵活的波纹的翅翼在拍打时产生变形,这些灵活的翅翼结构 随着时间不断的进化,可以实现非常高的飞行效率,并且提高飞行过程中的稳定性和 降低了一定的重量。微型飞行器设计中必须处理严格有效的载荷,升阻力特性以及其 他的挑战。这其中已经有许多尝试,包括自然界中发现的灵活的柔性机翼结构的微型 飞行器的柔性翅翼和相对应的扑翼驱动机构的设计。 1.1.1固定翼飞行器 固定翼飞行器是最早通过采用机械装置达到实现飞行目的的方式之一,是目前应 用最为广泛的一种飞行方式。但是,目前固定翼飞行器却遇到小型化这一趋势的挑战。 在图1-1所示的模型是佛罗里达大学的研究人员专门开发的,为了减小飞行中性能尺 寸的影响。当机翼的翼展被减小到一定尺寸之后,在低雷诺数下会发生气动跃迁,从 而引起机翼的空气动力性能下降。由于固定翼微型飞行器起飞过程中需要更大的前飞 速度,以产生所需的升力来飞行。而控制固定翼飞行器飞行的舵面尺寸则非常小,气 动的效率降低,利用舵面来操控飞行,并且提供抗干扰能力,这其中产生的作用非常 有限。微型固定翼飞行器因为主尺度比较小,在低雷诺数的情况下,空气产生黏性效 应会加强,气动力则会显示出与高雷诺数下不同的力学特性。此外,固定翼微型飞行 器也不适合短距起飞、着陆和避障,并且也没有其他的可以依靠短距离起飞的良好性 能。 图1-1弗罗里达大学固定翼微型飞行器 图1-2 Seiko Epson公司FR-I旋翼微型飞行器 Fig.1-1 University of Florida's fixed-wing Fig.1-2 Seiko Epson company FR-II rotor 1.1.2旋翼飞行器 第2页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 2 页 驱动机构开展了大量的研究工作。鸟类在飞行过程中的有羽翼的变形,蝙蝠的翅翼有 翅骨膜皮,蜻蜓具有高度灵活的波纹的翅翼在拍打时产生变形,这些灵活的翅翼结构 随着时间不断的进化,可以实现非常高的飞行效率,并且提高飞行过程中的稳定性和 降低了一定的重量。微型飞行器设计中必须处理严格有效的载荷,升阻力特性以及其 他的挑战。这其中已经有许多尝试,包括自然界中发现的灵活的柔性机翼结构的微型 飞行器的柔性翅翼和相对应的扑翼驱动机构的设计。 1.1.1 固定翼飞行器 固定翼飞行器是最早通过采用机械装置达到实现飞行目的的方式之一,是目前应 用最为广泛的一种飞行方式。但是,目前固定翼飞行器却遇到小型化这一趋势的挑战。 在图 1-1 所示的模型是佛罗里达大学的研究人员专门开发的,为了减小飞行中性能尺 寸的影响。当机翼的翼展被减小到一定尺寸之后,在低雷诺数下会发生气动跃迁,从 而引起机翼的空气动力性能下降。由于固定翼微型飞行器起飞过程中需要更大的前飞 速度,以产生所需的升力来飞行。而控制固定翼飞行器飞行的舵面尺寸则非常小,气 动的效率降低,利用舵面来操控飞行,并且提供抗干扰能力,这其中产生的作用非常 有限。微型固定翼飞行器因为主尺度比较小,在低雷诺数的情况下,空气产生黏性效 应会加强,气动力则会显示出与高雷诺数下不同的力学特性。此外,固定翼微型飞行 器也不适合短距起飞、着陆和避障,并且也没有其他的可以依靠短距离起飞的良好性 能[4]。 图 1-1 弗罗里达大学固定翼微型飞行器 图 1-2 Seiko Epson 公司 FR-II 旋翼微型飞行器 Fig.1-1 University of Florida's fixed-wing Fig.1-2 Seiko Epson company FR - II rotor 1.1.2 旋翼飞行器 万方数据
上海工程技术大学硕士学位论文 第一章绪论 旋翼飞行方式通常被直升机所采用,飞行器的升力并不是通过飞行速度的增加而 提高,而是通过旋翼桨的加速旋转来实现的。微型的旋翼飞行器是在比较低的雷诺数 下飞行的,所以空气产生的粘滞作用力比较大,因此其空气动力学特性和通常直升机 有非常大的差异,所以直升机中所研究出的空气动力学原理并不能直接的运用到微型 旋翼飞行器上。虽然旋翼微型飞行器可以执行复杂的动作,例如垂直起飞和降落和着 陆,容易在悬停状态控制,以及避障等。然而,旋翼飞行器相同得飞行性能在低雷诺 数的情况下会变差。叶素法理论通常在大型直升机计算升力和诱导角时,忽略由于诱 导效应产生的水平诱导速度的影响是可行的,但是在低雷诺数的情况下微型旋翼飞行 器的计算过程中,每一片桨叶所承受的粘性力对飞行器的升力的产生影响都非常变得 显著,所以为了提高计算的准确性,叶素则法则需要重新的加以修正才可行。图1-2 所示的精工爱普生公司的FR-ⅡMAV重12.3克,可以飞三分钟。随着尺寸的不断减 小,旋翼桨的旋转所能产生提升力却急剧下降。由于旋翼桨叶的高速旋转,旋翼飞行 器发出的噪声能够容易地被监测到,因此隐蔽性能很差。 1.1.3扑翼飞行器 一方面扑翼飞行器能够呈现固定翼和旋翼飞行器的优点,可以快速的起飞、悬停、 加速及具有高度的机动性和灵活性,另一方面能够弥补两者的不足。借助观察鸟类许 多复杂的动作,从中可以发现,即使是很小的鸟类也能显示出优越的飞行机动性能。 与固定翼和旋翼飞行器相比,扑翼飞行器其特征在于最关键的是可以控制在很小的尺 寸情况下,仍然可以表现出优异飞行性能。随着扑动的翅翼拍打频率的增加,以很小 的翅翼飞行是可以的。 然而,昆虫和鸟类的扑翼飞行,这是在丰富的自然界中显示出了无与伦比的飞行 性能超越了现今任何的飞行器。昆虫和一些鸟类(例如,蜂鸟)可以随时起飞和进行 垂直方向的飞行,还可以进行快速的飞行转弯,并且能够持续悬停几秒钟。因此,昆 虫和鸟类飞行在最近几十年年备受关注,并已促使许多研究,设计出一个具有很高飞 行效率的仿生微型扑翼飞行器,这其中带有类似悬停功能的扑翼飞行器的设计则是非 常有难度的一个方向阿。 扑翼飞行的方式与固定翼和旋翼的飞行方式有很大的不同,扑翼飞行方式更为复 杂。早在几万年前飞行生物就采用了扑翼的飞行方式,尽管近几十年来对鸟类和昆虫 第3页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 3 页 旋翼飞行方式通常被直升机所采用,飞行器的升力并不是通过飞行速度的增加而 提高,而是通过旋翼桨的加速旋转来实现的。微型的旋翼飞行器是在比较低的雷诺数 下飞行的,所以空气产生的粘滞作用力比较大,因此其空气动力学特性和通常直升机 有非常大的差异,所以直升机中所研究出的空气动力学原理并不能直接的运用到微型 旋翼飞行器上。虽然旋翼微型飞行器可以执行复杂的动作,例如垂直起飞和降落和着 陆,容易在悬停状态控制,以及避障等。然而,旋翼飞行器相同得飞行性能在低雷诺 数的情况下会变差。叶素法理论通常在大型直升机计算升力和诱导角时,忽略由于诱 导效应产生的水平诱导速度的影响是可行的,但是在低雷诺数的情况下微型旋翼飞行 器的计算过程中,每一片桨叶所承受的粘性力对飞行器的升力的产生影响都非常变得 显著,所以为了提高计算的准确性,叶素则法则需要重新的加以修正才可行。图 1-2 所示的精工爱普生公司的 FR-II MAV 重 12.3 克,可以飞三分钟。随着尺寸的不断减 小,旋翼桨的旋转所能产生提升力却急剧下降。由于旋翼桨叶的高速旋转,旋翼飞行 器发出的噪声能够容易地被监测到,因此隐蔽性能很差。 1.1.3 扑翼飞行器 一方面扑翼飞行器能够呈现固定翼和旋翼飞行器的优点,可以快速的起飞、悬停、 加速及具有高度的机动性和灵活性,另一方面能够弥补两者的不足。借助观察鸟类许 多复杂的动作,从中可以发现,即使是很小的鸟类也能显示出优越的飞行机动性能。 与固定翼和旋翼飞行器相比,扑翼飞行器其特征在于最关键的是可以控制在很小的尺 寸情况下,仍然可以表现出优异飞行性能。随着扑动的翅翼拍打频率的增加,以很小 的翅翼飞行是可以的。 然而,昆虫和鸟类的扑翼飞行,这是在丰富的自然界中显示出了无与伦比的飞行 性能超越了现今任何的飞行器。昆虫和一些鸟类(例如,蜂鸟)可以随时起飞和进行 垂直方向的飞行,还可以进行快速的飞行转弯,并且能够持续悬停几秒钟。因此,昆 虫和鸟类飞行在最近几十年年备受关注,并已促使许多研究,设计出一个具有很高飞 行效率的仿生微型扑翼飞行器,这其中带有类似悬停功能的扑翼飞行器的设计则是非 常有难度的一个方向[6]。 扑翼飞行的方式与固定翼和旋翼的飞行方式有很大的不同,扑翼飞行方式更为复 杂。早在几万年前飞行生物就采用了扑翼的飞行方式,尽管近几十年来对鸟类和昆虫 万方数据
上海工程技术大学硕士学位论文 第一章绪论 的高升力飞行机理的认识逐渐的深化,但是可以说该领域的研究依然处于初级阶段, 至今还未有谁可以完全理解其飞行机理,还没有一套完整的理论可以阐述扑翼飞行的 机理。 1.2仿生扑翼飞行器柔性翅翼及驱动机构研究进展 需要注意的是,只有传统的气动翼抬起稳定的气流,并不能解释为什么通过扑翼 飞行的方式昆虫就可以获得足够悬浮在空气中的升力。1973年Wis-Fogh研究了很多 昆虫飞行信息后,提出了新一代的扭转和扑动机制(也称为Wis-ogh机制),并且 讨论了这种机制产生的瞬时升力的机理。柔性翅翼扭转机制是不稳定流动产生飞行升 力的一个典型例子,它的发现在昆虫飞行非定常流动理论的研究中起到了非常重要的 作用。 1990年Freymuth对柔性翅翼的扑动和俯仰扭转运动进行了研究,表明这些运动 方式足以提供使昆虫悬停的升力☑。1993年Delaurier改进了1.2Hz,44英尺的飞行 速度每秒的扑翼理论,建立对称的扑翼扑动和扭转运动模型,并计算出18英尺的翼 展扑动频率和模型机翼的升力、推力和输入功率等8)。1994年史密斯开始使用有限 元分析方法,使用该方法建立一个飞蛾柔性翅翼弹性动力学和空气动力学相结合的模 型,根据空气动力学和惯性力学对弯曲和扭转运动中不同的类型进行研究,并且与其 所述的刚性翅翼模型进行了比较分析。1995年V®st通过不稳定的二维流动的方法和 风洞试验来研究扑翼运动的非定常气动模型,该模型考虑了机翼在同一时间产生扭转 变形。1996年史密斯利用昆虫飞行二维面元法非定常空气动力学计算,过程中开始 考虑到翅膀扭转产生的影响。1997年霍尔提出的计算方法对拍打着翅膀产生升力的 价值和推力跳动最小的循环分布作出实质性的解释。1998年Pendaries提出了使用非 弹性扑翼铰链弯曲和扭转推力设计方法,并通过采用有限元方法,建立了气动弹性翅 翼驱动机构的改进理论模型。Tuncer则对具有俯仰两个自由度和翼型动态失速分别进 行了研究。1999年Ramamurti基于非结构化网格的有限元方法,模拟非定常流场和 翅翼的扭转动作,从生物学的角度出发,主要研究在低雷诺数的影响下,对扑翼运动 过程中翅翼的柔性变形进行研究,解释微型扑翼飞行器设计中的一些关键问题9。 近年来,随着计算机技术的飞速发展,计算机的性能有很大的提高,使用求解 NS方程的方法对扑翼的流场分析成为可能,从而可以考虑粘性流场对扑翼运动的影 第4页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 4 页 的高升力飞行机理的认识逐渐的深化,但是可以说该领域的研究依然处于初级阶段, 至今还未有谁可以完全理解其飞行机理,还没有一套完整的理论可以阐述扑翼飞行的 机理。 1.2 仿生扑翼飞行器柔性翅翼及驱动机构研究进展 需要注意的是,只有传统的气动翼抬起稳定的气流,并不能解释为什么通过扑翼 飞行的方式昆虫就可以获得足够悬浮在空气中的升力。1973 年 Weis-Fogh 研究了很多 昆虫飞行信息后,提出了新一代的扭转和扑动机制(也称为 Weis-Fogh 机制),并且 讨论了这种机制产生的瞬时升力的机理。柔性翅翼扭转机制是不稳定流动产生飞行升 力的一个典型例子,它的发现在昆虫飞行非定常流动理论的研究中起到了非常重要的 作用。 1990 年 Freymuth 对柔性翅翼的扑动和俯仰扭转运动进行了研究,表明这些运动 方式足以提供使昆虫悬停的升力[7]。1993 年 Delaurier 改进了 1.2Hz,44 英尺的飞行 速度每秒的扑翼理论,建立对称的扑翼扑动和扭转运动模型,并计算出 18 英尺的翼 展扑动频率和模型机翼的升力、推力和输入功率等[8]。 1994 年史密斯开始使用有限 元分析方法,使用该方法建立一个飞蛾柔性翅翼弹性动力学和空气动力学相结合的模 型,根据空气动力学和惯性力学对弯曲和扭转运动中不同的类型进行研究,并且与其 所述的刚性翅翼模型进行了比较分析。1995 年 Vest 通过不稳定的二维流动的方法和 风洞试验来研究扑翼运动的非定常气动模型,该模型考虑了机翼在同一时间产生扭转 变形。1996 年史密斯利用昆虫飞行二维面元法非定常空气动力学计算,过程中开始 考虑到翅膀扭转产生的影响。1997 年霍尔提出的计算方法对拍打着翅膀产生升力的 价值和推力跳动最小的循环分布作出实质性的解释。1998 年 Pendaries 提出了使用非 弹性扑翼铰链弯曲和扭转推力设计方法,并通过采用有限元方法,建立了气动弹性翅 翼驱动机构的改进理论模型。Tuncer 则对具有俯仰两个自由度和翼型动态失速分别进 行了研究。1999 年 Ramamurti 基于非结构化网格的有限元方法,模拟非定常流场和 翅翼的扭转动作,从生物学的角度出发,主要研究在低雷诺数的影响下,对扑翼运动 过程中翅翼的柔性变形进行研究,解释微型扑翼飞行器设计中的一些关键问题[9]。 近年来,随着计算机技术的飞速发展,计算机的性能有很大的提高,使用求解 N-S 方程的方法对扑翼的流场分析成为可能,从而可以考虑粘性流场对扑翼运动的影 万方数据
上海工程技术大学硕士学位论文 第一章绪论 响。在这方面研究的代表有Tuncer,.普拉策等人。随着计算机技术的不断发展,研究 人员开始尝试使用计算机来求解N-S方程,并且通过实验来分析在流场中扑动着的翅 翼,取得了一定的成效。但是这种方法并不是非常严谨的,虽然NS方程的解的分布 是边界条件,但是对边界中产生的轻微偏差非常敏感,因此得出的分析结果可能是不 同的。在目前情况下,由于非常严格的不稳定边界条件的设置仍然是一个挑战。此外, 研究人员也开始尝试研究二维流场对扑动的柔性翅翼的影响和流场非定常理论。 2002年清华大学曾理江及其团队使用非线性理论研究方法,通过测量、建模、 仿真昆虫扑翼运动飞行机理和运动参数1。北京航空航天大学孙茂等人则通过运用数 值求解的方法,测量昆虫的翅膀获得的参数,进一步解释微型扑翼飞行器设计柔性翅 翼的原则,其中包括新的空气动力学概念,新的控制方式,最大速度所能允许的重量, 及所需的功率等问题。2008年南京航空航天大学的昂海松和其团队对鸟类扑翼飞行 的机制和扭转模型进行了深入研究,并通过使用该模型进行数值计算,得出了采用这 种模型,升力系数将显著的增加这个结论山。2012年上海交通大学陈文元教授和其 团队研究的扑翼飞行机器人,为两对翅翼的蜻蜓,其翅翼载荷是由它的重量与机翼的 总面积之比来确定,但也提出了翅翼载荷和振动频率之间的关系。虽然越来越多的研 究可以探索从某一个角度来解释昆虫翅翼产生高升力机理,这些理论目前的发展对多 种仿生微型扑翼飞行机器人的设计已经起到了一定的指导作用。 1.2.1国外扑翼飞行器柔性翅翼及驱动机构研究现状 2008年哈佛大学微机器人实验室罗伯特伍德教授领导并创立的科研队伍的研究 人员致力于重几十毫克,几十毫米翼展扑翼飞行的微型机器的发展。他们致力于基于 仿生学的微型扑翼飞行机器人柔性翅翼设计,驱动机构的制造,控制和分析的研究。 通过对微系统的设计和制造进行深入研究,并且汲取大自然中飞行生物的灵感,他们 设计的微型飞行器的性能和稳定性均达到了优良等级。这些飞行器可以在搜索和救援, 农业援助,环境监测和测量复杂的环境中使用,并且长期致力于开发并改善微型飞行 机器人的性能2。 北卡罗来纳州立大学开发的蝙蝠扑翼微型飞行器(BATMAV)如图1-4是由该校 机械学院Gheorghe Bunget和航天工程研究所的Stefan Seelecke负责这个项目的研究, 这个BATMAV项目的目的是基于灵活的记忆金属折叠翼飞行器模仿蝙蝠的飞行)。 第5页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 5 页 响。在这方面研究的代表有 Tuncer,普拉策等人。随着计算机技术的不断发展,研究 人员开始尝试使用计算机来求解 N-S 方程,并且通过实验来分析在流场中扑动着的翅 翼,取得了一定的成效。但是这种方法并不是非常严谨的,虽然 N-S 方程的解的分布 是边界条件,但是对边界中产生的轻微偏差非常敏感,因此得出的分析结果可能是不 同的。在目前情况下,由于非常严格的不稳定边界条件的设置仍然是一个挑战。此外, 研究人员也开始尝试研究二维流场对扑动的柔性翅翼的影响和流场非定常理论。 2002 年清华大学曾理江及其团队使用非线性理论研究方法,通过测量、建模、 仿真昆虫扑翼运动飞行机理和运动参数[10]。北京航空航天大学孙茂等人则通过运用数 值求解的方法,测量昆虫的翅膀获得的参数,进一步解释微型扑翼飞行器设计柔性翅 翼的原则,其中包括新的空气动力学概念,新的控制方式,最大速度所能允许的重量, 及所需的功率等问题。2008 年南京航空航天大学的昂海松和其团队对鸟类扑翼飞行 的机制和扭转模型进行了深入研究,并通过使用该模型进行数值计算,得出了采用这 种模型,升力系数将显著的增加这个结论[11]。2012 年上海交通大学陈文元教授和其 团队研究的扑翼飞行机器人,为两对翅翼的蜻蜓,其翅翼载荷是由它的重量与机翼的 总面积之比来确定,但也提出了翅翼载荷和振动频率之间的关系。虽然越来越多的研 究可以探索从某一个角度来解释昆虫翅翼产生高升力机理,这些理论目前的发展对多 种仿生微型扑翼飞行机器人的设计已经起到了一定的指导作用。 1.2.1 国外扑翼飞行器柔性翅翼及驱动机构研究现状 2008 年哈佛大学微机器人实验室罗伯特伍德教授领导并创立的科研队伍的研究 人员致力于重几十毫克,几十毫米翼展扑翼飞行的微型机器的发展。他们致力于基于 仿生学的微型扑翼飞行机器人柔性翅翼设计,驱动机构的制造,控制和分析的研究。 通过对微系统的设计和制造进行深入研究,并且汲取大自然中飞行生物的灵感,他们 设计的微型飞行器的性能和稳定性均达到了优良等级。这些飞行器可以在搜索和救援, 农业援助,环境监测和测量复杂的环境中使用,并且长期致力于开发并改善微型飞行 机器人的性能[12]。 北卡罗来纳州立大学开发的蝙蝠扑翼微型飞行器(BATMAV)如图 1-4 是由该校 机械学院 Gheorghe Bunget 和航天工程研究所的 Stefan Seelecke 负责这个项目的研究, 这个 BATMAV 项目的目的是基于灵活的记忆金属折叠翼飞行器模仿蝙蝠的飞行[13]。 万方数据
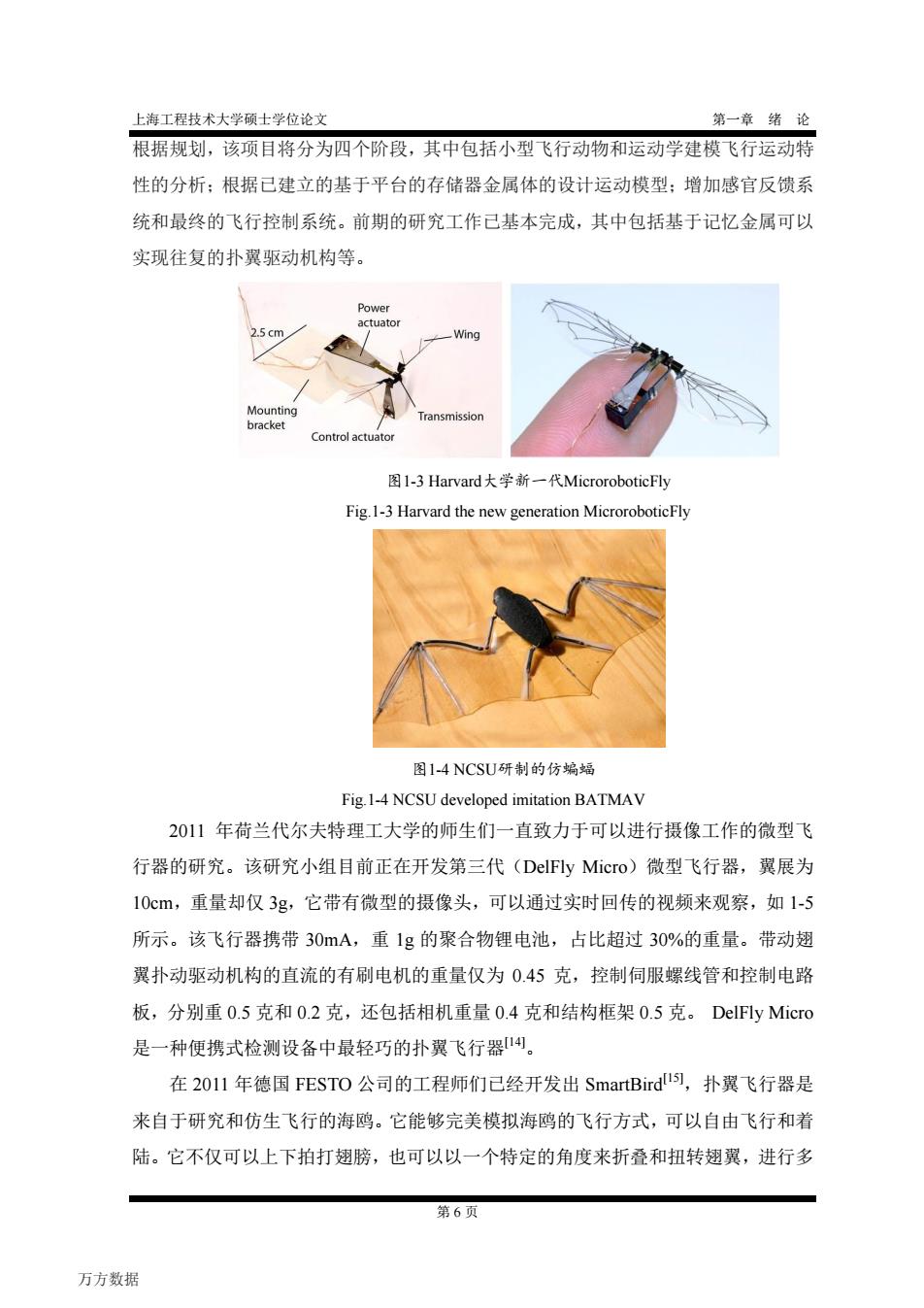
上海工程技术大学硕士学位论文 第一章绪论 根据规划,该项目将分为四个阶段,其中包括小型飞行动物和运动学建模飞行运动特 性的分析:根据已建立的基于平台的存储器金属体的设计运动模型:增加感官反馈系 统和最终的飞行控制系统。前期的研究工作已基本完成,其中包括基于记忆金属可以 实现往复的扑翼驱动机构等。 Power actuator 2.5cm _Wing Mounting Transmission bracket Control actuator 图l-3 Harvard大学新一代MicroroboticFly Fig.1-3 Harvard the new generation MicroroboticFly 图1-4NCSU研制的仿蝙蝠 Fig.1-4 NCSU developed imitation BATMAV 2011年荷兰代尔夫特理工大学的师生们一直致力于可以进行摄像工作的微型飞 行器的研究。该研究小组目前正在开发第三代(DelFly Micro)微型飞行器,翼展为 10cm,重量却仅3g,它带有微型的摄像头,可以通过实时回传的视频来观察,如1-5 所示。该飞行器携带30mA,重1g的聚合物锂电池,占比超过30%的重量。带动翅 翼扑动驱动机构的直流的有刷电机的重量仅为0.45克,控制伺服螺线管和控制电路 板,分别重0.5克和0.2克,还包括相机重量0.4克和结构框架0.5克。DelFly Micro 是一种便携式检测设备中最轻巧的扑翼飞行器4。 在2011年德国FESTO公司的工程师们已经开发出SmartBird!),扑翼飞行器是 来自于研究和仿生飞行的海鸥。它能够完美模拟海鸥的飞行方式,可以自由飞行和着 陆。它不仅可以上下拍打翅膀,也可以以一个特定的角度来折叠和扭转翅翼,进行多 第6页 万方数据
上海工程技术大学硕士学位论文 第一章 绪 论 第 6 页 根据规划,该项目将分为四个阶段,其中包括小型飞行动物和运动学建模飞行运动特 性的分析;根据已建立的基于平台的存储器金属体的设计运动模型;增加感官反馈系 统和最终的飞行控制系统。前期的研究工作已基本完成,其中包括基于记忆金属可以 实现往复的扑翼驱动机构等。 图1-3 Harvard大学新一代MicroroboticFly Fig.1-3 Harvard the new generation MicroroboticFly 图1-4 NCSU研制的仿蝙蝠 Fig.1-4 NCSU developed imitation BATMAV 2011 年荷兰代尔夫特理工大学的师生们一直致力于可以进行摄像工作的微型飞 行器的研究。该研究小组目前正在开发第三代(DelFly Micro)微型飞行器,翼展为 10cm,重量却仅 3g,它带有微型的摄像头,可以通过实时回传的视频来观察,如 1-5 所示。该飞行器携带 30mA,重 1g 的聚合物锂电池,占比超过 30%的重量。带动翅 翼扑动驱动机构的直流的有刷电机的重量仅为 0.45 克,控制伺服螺线管和控制电路 板,分别重 0.5 克和 0.2 克,还包括相机重量 0.4 克和结构框架 0.5 克。 DelFly Micro 是一种便携式检测设备中最轻巧的扑翼飞行器[14]。 在 2011 年德国 FESTO 公司的工程师们已经开发出 SmartBird[15],扑翼飞行器是 来自于研究和仿生飞行的海鸥。它能够完美模拟海鸥的飞行方式,可以自由飞行和着 陆。它不仅可以上下拍打翅膀,也可以以一个特定的角度来折叠和扭转翅翼,进行多 万方数据