第9卷第2期 智能系统学报 Vol.9 No.2 2014年4月 CAAI Transactions on Intelligent Systems Apr.2014 D0I:10.3969/i.issn.1673.4785.201303034 网络出版地址:http://www.cnki.net/kcms/doi/CNKI:23-1538/TP.20131101.1720.007html 一种离散直接自适应模糊滑模控制 张晓宇1刘彬博2 (1.华北科技学院电子信息工程学院,北京101601:2.中央新影集团CCTV证券资讯频道,北京100080) 摘要:为获得离散非线性系统的无抖振滑模控制,基于自适应模糊逻辑系统(AFLS)构建自适应模糊滑模控制。 先通过在线自适应律调节AFLS的参数,使AFLS输出逼近所设计的滑模控制(SMC);然后用Lyapunov方法证明了 逼近误差的收敛以及滑模的可达。对倒立摆系统的应用仿真研究结果证明了所提出方法的有效性,因此设计的离 散控制器能保证滑模到达,并具有较强鲁棒性能。 关键词:离散系统:模糊逻辑系统:滑模控制:自适应控制:非线性系统:鲁棒控制:变结构控制:抖振 中图分类号:TP273文献标志码:A文章编号:1673-4785(2014)02-0197-07 中文引用格式:张晓宇,刘彬博.一种离散直接自适应模糊滑模控制[J].智能系统学报,2014,9(2):197-203. 英文引用格式:ZHANG Xiaoyu,LIU Binbo.A direct adaptive fuzzy sliding mode control method for discrete nonlinear systems[J]. CAAI Transactions on Intelligent Systems,2014,9(2):197-203. A direct adaptive fuzzy sliding mode control method for discrete nonlinear systems ZHANG Xiaoyu',LIU Binbo? (1.Department of Electronics and Information Engineering,North China Institute of Science and Technology,Beijing 101601,China; 2.CCTV Securities Information Channel,Beijing 100080,China) Abstract:In order to obtain chatter-free sliding mode control for a class of discrete nonlinear systems,an adaptive fuzzy sliding mode control FSMC)is constructed on the basis of the adaptive fuzzy logic system (AFLS).Firstly, the online adaptive law is applied to regulate the parameters of the AFLS,in order to make the output of the AFLS approximate to the pre-designed sliding mode control (SMC);then the convergence of the approximation errors and the reachability of the SMC are proofed by using the Lyapunov method.The simulation results of the inverted pendu- lum system verify the effectiveness of the presented design.Therefore,the proposed discrete controller drives the system state onto the sliding mode,and its robustness is enhanced. Keywords:discrete system;fuzzy logic system;sliding mode control;adaptive control;nonlinear systems;robust control;variable structure control;chattering 模糊、自适应等方法在连续系统控制问题中已统的离散化以及系统的理想滑动模态根本不能到 经显示出成功的运用2)。但目前模糊直接、间接 达,所以准滑动模态的降阶特性不再存在。这给系 自适应等方法在离散系统中的运用研究尚不深入, 统的稳定性分析造成了困难。滑模控制的分步设计 有大量待研究、发展的问题。在离散系统中,由于系 法虽然可以实施,但是不能保证较好的鲁棒稳定性。 离散系统的采样时间对于模糊逻辑系统的逼近能力 收稿日期:2013-03-18.网络出版日期:2013-11-01. 基金项目:国家自然科学基金资助项目(61304024):河北省青年科学基 产生很大影响,对于自适应机构的自适应能力、速度 金资助项目(F2013508110):中央高校基本科研业务费资助 也同样产生较大影响。因而离散系统中模糊自适应 项目(3142013055):河北省教育厅科技计划资助项目 (Z2012089). 方法在滑模控制中的应用对于消除滑模控制的抖振 通信作者:张晓字.E-mail:ysuzxy(@aliyun..com 作用较之连续系统大大减弱
第 9 卷第 2 期 智 能 系 统 学 报 Vol.9 №.2 2014 年 4 月 CAAI Transactions on Intelligent Systems Apr. 2014 DOI:10.3969 / j.issn.1673⁃4785.201303034 网络出版地址:http: / / www.cnki.net / kcms/ doi / CNKI:23⁃1538 / TP.20131101.1720.007 .html 一种离散直接自适应模糊滑模控制 张晓宇1刘彬博2 (1.华北科技学院 电子信息工程学院,北京 101601; 2. 中央新影集团 CCTV 证券资讯频道,北京 100080) 摘 要:为获得离散非线性系统的无抖振滑模控制,基于自适应模糊逻辑系统( AFLS)构建自适应模糊滑模控制。 先通过在线自适应律调节 AFLS 的参数,使 AFLS 输出逼近所设计的滑模控制( SMC);然后用 Lyapunov 方法证明了 逼近误差的收敛以及滑模的可达。 对倒立摆系统的应用仿真研究结果证明了所提出方法的有效性,因此设计的离 散控制器能保证滑模到达,并具有较强鲁棒性能。 关键词:离散系统; 模糊逻辑系统; 滑模控制; 自适应控制; 非线性系统; 鲁棒控制; 变结构控制; 抖振 中图分类号: TP273 文献标志码:A 文章编号:1673⁃4785(2014)02⁃0197⁃07 中文引用格式:张晓宇,刘彬博.一种离散直接自适应模糊滑模控制[J]. 智能系统学报, 2014, 9(2): 197⁃203. 英文引用格式:ZHANG Xiaoyu, LIU Binbo. A direct adaptive fuzzy sliding mode control method for discrete nonlinear systems[J]. CAAI Transactions on Intelligent Systems, 2014, 9(2): 197⁃203. A direct adaptive fuzzy sliding mode control method for discrete nonlinear systems ZHANG Xiaoyu 1 , LIU Binbo 2 (1. Department of Electronics and Information Engineering, North China Institute of Science and Technology, Beijing 101601, China; 2. CCTV Securities Information Channel, Beijing 100080, China) Abstract:In order to obtain chatter⁃free sliding mode control for a class of discrete nonlinear systems, an adaptive fuzzy sliding mode control (FSMC) is constructed on the basis of the adaptive fuzzy logic system (AFLS). Firstly, the online adaptive law is applied to regulate the parameters of the AFLS, in order to make the output of the AFLS approximate to the pre⁃designed sliding mode control (SMC); then the convergence of the approximation errors and the reachability of the SMC are proofed by using the Lyapunov method. The simulation results of the inverted pendu⁃ lum system verify the effectiveness of the presented design. Therefore, the proposed discrete controller drives the system state onto the sliding mode, and its robustness is enhanced. Keywords:discrete system;fuzzy logic system; sliding mode control; adaptive control; nonlinear systems; robust control; variable structure control; chattering 收稿日期:2013⁃03⁃18. 网络出版日期:2013⁃11⁃01. 基金项目:国家自然科学基金资助项目(61304024);河北省青年科学基 金资助项目(F2013508110);中央高校基本科研业务费资助 项目 ( 3142013055 ); 河 北 省 教 育 厅 科 技 计 划 资 助 项 目 (Z2012089). 通信作者:张晓宇. E⁃mail:ysuzxy@ aliyun.com. 模糊、自适应等方法在连续系统控制问题中已 经显示出成功的运用[1⁃25] 。 但目前模糊直接、间接 自适应等方法在离散系统中的运用研究尚不深入, 有大量待研究、发展的问题。 在离散系统中,由于系 统的离散化以及系统的理想滑动模态根本不能到 达,所以准滑动模态的降阶特性不再存在。 这给系 统的稳定性分析造成了困难。 滑模控制的分步设计 法虽然可以实施,但是不能保证较好的鲁棒稳定性。 离散系统的采样时间对于模糊逻辑系统的逼近能力 产生很大影响,对于自适应机构的自适应能力、速度 也同样产生较大影响。 因而离散系统中模糊自适应 方法在滑模控制中的应用对于消除滑模控制的抖振 作用较之连续系统大大减弱

·198 智能系统学报 第9卷 本文从自适应模糊逻辑系统出发用离散动态自 设滑模s(k)=Ce(),C=[c1c2…ca-11]'∈R" 适应模糊逻辑系统逼近滑模控制律,给出逼近误差 是Hurwitz多项式的系数。对于上述线性不确定离 收敛的自适应机构和构建方法:通过AFLS动态的 散系统提出以下定理。 参数设计形成较好的滤波效果,用以消除抖振。 定理1对于非线性系统(1),若取准滑模控制律 1离散非线性系统的SMC u()=-g[2c)-2a)- =1 考虑如下离散非线性系统, r(k)+(qT,-1)s(k)+k2sgns(k)](4) x(k+1)=x+1(k),i=1,2,…,n-1 式中:T,为准滑模控制器的采样周期。设计参数q、 x(k+1)=f(x,(k))+g(x,(k))u(k)(1) k2满足 i=1,2,…,n Agg 1 式中:f(x,(k))、g(x:(k)满足 (1+△gg1)T1 <9<T Lf(x,(k)|≤f(x(k)) g(x:(k)=g+△g(x,(k)) k2≥fx,(k)+ 式中:0<△g(x:(k))≤△g是系统非线性控制增益的 不确定性,f(x,(k))是系统非线性函数的上界函数 并且对x,(k)具有连续二阶导数,g>0、△g>0均为 (5) 已知常数。设被跟踪状态为x,轨迹模型满足 则系统滑模s(k)将于有限时间内到达s(k)=0的 x(k+1)=x+(k),i=1,2,…,n-1 邻域s2={s(k)|-△≤s(k)≤△},其中滑模邻域 (k+1)=a-a(k)+r() (2) 宽度为△=(2+△gg)k20 证明考虑不等式离散到达条件 式中:r(k)是一有界参考输入信号,a-(i=1,2, …,n)是Hurwitz多项式系数。则跟踪误差e(k)= 41<-an (6) [e(k)…e(k)]T,e.(k)=x:(k)-x(k),i=l, △s+1=sk+1-sg=f(x:(k))+△guh 2,…,n.依据式(1)、(2),误差方程为 (qT -1)sg kasgns&-st e,(k+1)=e+1(k),i=1,2,…,n-1 s△sk+1=-s2+s4[f(x:(k))+△gu4 e(k+1)=x(k)+g(k)()-(3) (qT:-1)sk-k2sgns4] (7) ∑a-x(k)-r() [4s1]2=[/f(x,(k)+Agk-(9T1-1)s4-k3sgms]2+ si-2s:[f(x;(k))+Agua -(qT:-1)sk -kzsgns;] (8) 若要使得到达条件(6)满足,将式(7)、(8)代入式(6)得 -<-n()+4e-(g,-1-6e户 s2>[fx:(k))+△g4k-(9I-1)s-k,sgns]2 lsl>()+△gg[Ee())-∑a-《)-(]+ (1+4gg1)1(gT1-1)s6|+(1+△gg)k2 (9) 依据式(5)式(9)等价为 以消除抖振。 [(1+△gg1)qT,-Agg1]|s|>(2+△gg1)k2 可见在边界△外到达条件(6)成立。证毕。 2模糊自适应SMC 定理1虽然得到了系统(3)的一个SMC,但是 对于定理1准滑模控制率,引入滑模边界层参数 这个SMC使得滑模到达切换带是很宽的,而且宽度 入>0,当系统滑模到达边界层内施加模糊逻辑 随着系统不确定性的变化而变化。这在实际上会形 (LC)控制律u(k),停止准滑模控制率山,(k)。即 成很大的抖振。因此本文寻求其模糊自适应SMC
本文从自适应模糊逻辑系统出发用离散动态自 适应模糊逻辑系统逼近滑模控制律,给出逼近误差 收敛的自适应机构和构建方法;通过 AFLS 动态的 参数设计形成较好的滤波效果,用以消除抖振。 1 离散非线性系统的 SMC 考虑如下离散非线性系统, xi(k + 1) = xi+1(k),i = 1,2,…,n - 1 xn(k + 1) = f(xi(k)) + g(xi(k))u(k) i = 1,2,…,n ì î í ï ï ïï (1) 式中: f(xi(k)) 、 g(xi(k)) 满足 f(xi(k)) ≤ f - (xi(k)) g(xi(k)) = g + Δg(xi(k)) 式中: 0 < Δg(xi(k)) ≤Δg - 是系统非线性控制增益的 不确定性, f - (xi(k)) 是系统非线性函数的上界函数 并且对 xi(k) 具有连续二阶导数, g > 0、 Δg - > 0 均为 已知常数。 设被跟踪状态为 xd 轨迹模型满足 xdi(k + 1) = xd(i+1)(k),i = 1,2,…,n - 1 xdn(k + 1) = ∑ n 1 ai-1 xdi(k) + r(k) ì î í ï ï ïï (2) 式中: r(k) 是一有界参考输入信号, ai-1(i = 1,2, …,n) 是 Hurwitz 多项式系数。 则跟踪误差 e(k) = e1(k) … e [ n(k) ] T , ei(k) = xi(k) - xdi(k), i =1, 2,…,n .依据式(1)、(2), 误差方程为 ei(k + 1) = ei+1(k),i = 1,2,…,n - 1 en(k + 1) = f(xi(k)) + g(xi(k))u(k) - ∑ n 1 ai-1 xdi(k) - r(k) ì î í ï ïï ï ïï (3) 设滑模 s(k) = C T e(k), C = [c1 c2 … cn-1 1] T ∈ R n 是 Hurwitz 多项式的系数。 对于上述线性不确定离 散系统提出以下定理。 定理 1 对于非线性系统(1),若取准滑模控制律 us(k) = - g -1 [∑ n-1 i = 1 ci ei+1(k) - ∑ n 1 ai-1 xdi(k) - r(k) + (qT1 - 1)s(k) + k2 sgns(k)] (4) 式中: T1 为准滑模控制器的采样周期。 设计参数 q、 k2 满足 Δg - g -1 (1 + Δg - g -1 )T1 < q < 1 T1 k2 ≥ f - (xi(k)) + Δg - g -1 ∑ n-1 i = 1 ci ei+1(k) - ∑ n 1 ai-1 xdi(k) - r(k) ì î í ï ï ï ï ï ï ïï (5) 则系统滑模 s(k) 将于有限时间内到达 s(k) = 0 的 邻域 s Δ = {s(k) - Δ ≤ s(k) ≤ Δ} ,其中滑模邻域 宽度为 Δ = (2 + Δg - g -1 )k2 。 证明 考虑不等式离散到达条件 skΔsk+1 < - 1 2 (Δsk+1 ) 2 (6) Δsk+1 = sk+1 - sk = f(xi(k)) + Δgusk - (qT1 - 1)sk - k2 sgnsk - sk skΔsk+1 = - s 2 k + sk[f(xi(k)) + Δgusk - (qT1 - 1)sk - k2 sgnsk] (7) [Δsk+1 ] 2 = [f(xi(k)) + Δgusk - (qT1 - 1)sk - k2 sgnsk] 2 + s 2 k - 2sk[f(xi(k)) + Δgusk - (qT1 - 1)sk - k2 sgnsk] (8) 若要使得到达条件(6)满足,将式(7)、(8)代入式(6)得 - 1 2 s 2 k < - 1 2 [f(xi(k)) + Δgusk - (qT1 - 1)sk - k2 sgnsk] 2 s 2 k > [f(xi(k)) + Δgusk - (qT1 - 1)sk - k2 sgnsk] 2 sk > f(xi(k)) + Δgg -1 ∑ n-1 i = 1 ci ei+1(k) - ∑ n 1 ai-1 x [ di(k) - r(k) ] + (1 + Δgg -1 ) (qT1 - 1)sk + (1 + Δgg -1 )k2 (9) 依据式(5)式(9)等价为 1 + Δg - g -1 ( ) qT1 - Δg - g -1 [ ] sk > 2 + Δg - g -1 ( ) k2 可见在边界 Δ 外到达条件(6)成立。 证毕。 定理 1 虽然得到了系统(3)的一个 SMC,但是 这个 SMC 使得滑模到达切换带是很宽的,而且宽度 随着系统不确定性的变化而变化。 这在实际上会形 成很大的抖振。 因此本文寻求其模糊自适应 SMC 以消除抖振。 2 模糊自适应 SMC 对于定理 1 准滑模控制率,引入滑模边界层参数 λ > 0,当系统滑模到达边界层内施加模糊逻辑 (FLC)控制律 uf(k) ,停止准滑模控制率 us(k) 。 即 ·198· 智 能 系 统 学 报 第 9 卷

第2期 张晓宇,等:一种离散直接自适应模糊滑模控制 ·199 4,(k)= -g'[∑ce+(k)-∑a-1x(k)-r(k)+(gT,-1)s(k)+k2sgms(k)],ls(k)≥A 0,其他 数J(0,x)的优化问题。即 4(k)= u,s(k)|≤入 0,其他 (u(i)-u))2 u(k)=u,(k)+u(k) 0250)号三名 式中:4是模糊逻辑系统的输出,△是准滑动模态 求目标函数沿参数0方向的梯度得 区的宽度,因此入≥A。 -p a0 (u(i)-0()p)月 边界层厚度参数入的范围与系统不确定动态 i=0j=0 非线性函数的上界有直接关系。非线性系统的不确 参数0自校正的方向应该沿着目标函数对其梯 定性越大,准滑动模态区宽度越大,参数入选择范 度的负方向,由式(11)确定0的校正方向, 围越大。实验证明入对每个具体非线性系统有一 0G+1)-0G)=p(u(k)-0F(j)p)(11) 个最佳值。可以通过以下方法选择:已知状态的初 2.3 DAFLS逼近滑模控制 始值,代入非线性函数上界得到△值。一般入∈ 先考虑T,=IT2,l∈Z的情况下,AFLS输出 [4,34]效果较好。 (10)逼近普通离散SMC的误差。 2.1自适应模糊逻辑系统 定理2对于准滑模控制(4),若AFLS以式 对于系统(1)用AFLS来逼近滑模控制律。所 (11)为自适应机构且其采样周期T,远比准滑模控 采用的AFLS与文献[17]中相同,后件参数采用梯 制(4)的采样周期T,小,则AFLS(10)逼近准滑模 度优化自校正的方法进行。 控制(4)的误差渐近收敛。 选择滑模s(k)以及△s(k)为输入变量,构造具 证明在自适应律(11)下选取逼近误差的 有2个输入变量、1个输出变量的FBF型AFLS。其 Lyapunov函数为 中的前件参数由设计者调节,后件参数由自适应机 构校正。模糊控制规则为 0)=2(u(k)-0G)'p) (12) R:Ifs(k)iss:and△s(k)is△s:then u(j)is0.U) 若AFLS的采样周期远比控制器u(k)的采样周期 i=1,2,…,m 小则对式(12)有 式中:α为滑模s(k)的划分参数,B为滑模变化率, △s(k)的划分参数,j是AFLS的采样步长,0(U)是 40)=2[6G+1)'p]- 待校正的后件参数,m是规则总数。采用单点模糊 化、乘积推理、加权平均解模糊方法滑模控制的模糊 2[0GpI+([a)-8U+1Dj)p 逼近输出为 利用式(11)有 u)=0()'p (10) 式中:p=[P1P2…Pm]是模糊基函数向量, 4G》=2(pp)产(u()-0G)p'+ 0()T-[0,02…0.]T是待校正的后件参数 p'p(u(k)-0()'p)0G)'p-p'p(u(k)-0)'p)· 向量,并且 n=(i(4) u(k)=2(p'p)'((k)-8G)'p)2- ,i=1,2,…,m p'p(u(k)-0()p)2 (13) (s)4.(△s) 因为p是模糊基函数向量,所以0<p'p≤1。则由 i=1 式中:u和分别是滑模及其变化率的隶属度。 式(13)可得 2.2自适应率 △x()=v(U+1)-(G)<0 定义自适应模糊逻辑系统(AFLS)逼近滑模控 证毕。 制律(4)的误差目标函数为 接着,为进一步加强滤波效果以消除抖振,在 K0.=含三(a0- AFLS基础上引入动态自适应模糊逻辑系统(dy namic adaptive fuzzy logic system,DAFLS) 这样AFLS逼近控制律(4)的问题就转化为目标函 考虑n阶连续DAFLS,则
us(k) = - g -1 [∑ n-1 i = 1 ci ei+1(k) - ∑ n 1 ai-1 xdi(k) - r(k) + (qT1 - 1)s(k) + k2 sgns(k)], s(k) ≥ λ 0,其他 ì î í ï ï ïï uf(k) = uflc, s(k) ≤ λ {0,其他 u(k) = us(k) + uf(k) 式中: uflc 是模糊逻辑系统的输出, Δ 是准滑动模态 区的宽度,因此 λ ≥ Δ 。 边界层厚度参数 λ 的范围与系统不确定动态 非线性函数的上界有直接关系。 非线性系统的不确 定性越大,准滑动模态区宽度越大,参数 λ 选择范 围越大。 实验证明 λ 对每个具体非线性系统有一 个最佳值。 可以通过以下方法选择:已知状态的初 始值,代入非线性函数上界得到 Δ 值。 一般 λ ∈ [Δ,3Δ] 效果较好。 2.1 自适应模糊逻辑系统 对于系统(1)用 AFLS 来逼近滑模控制律。 所 采用的 AFLS 与文献[17]中相同,后件参数采用梯 度优化自校正的方法进行。 选择滑模 s(k) 以及 Δs(k) 为输入变量,构造具 有 2 个输入变量、1 个输出变量的 FBF 型 AFLS。 其 中的前件参数由设计者调节,后件参数由自适应机 构校正。 模糊控制规则为 R i : If s(k) is si and Δs(k) is Δsi then uf(j) is θi(j) i = 1,2,…,m 式中: α 为滑模 s(k) 的划分参数, β 为滑模变化率, Δs(k) 的划分参数, j 是 AFLS 的采样步长, θi(j) 是 待校正的后件参数, m 是规则总数。 采用单点模糊 化、乘积推理、加权平均解模糊方法滑模控制的模糊 逼近输出为 uf(j) = θ (j) T p (10) 式中: p = [p1 p2 … pm ] T 是模糊基函数向量, θ (j) T = [θ1 θ2 … θm ] T 是待校正的后件参数 向量,并且 pi = μ i s(s)μ i Δs(Δs) ∑ m i = 1 μ i s(s)μ i Δs(Δs) ,i = 1,2,…,m 式中: μ i s 和 μ i Δs 分别是滑模及其变化率的隶属度。 2.2 自适应率 定义自适应模糊逻辑系统(AFLS)逼近滑模控 制律(4)的误差目标函数为 J(θ(j),e(k)) = 1 2 ∑ k i = 0 ∑ l j = 0 (u(i) - uf(j)) 2 这样 AFLS 逼近控制律(4)的问题就转化为目标函 数 J(θ,x) 的优化问题。 即 J(θ(j),e(k)) minθ = 1 2 ∑ k i = 0 ∑ l j = 0 (u(i) - uf(j)) 2 求目标函数沿参数 θ 方向的梯度得 ∂J ∂θ = - p∑ k i = 0 ∑ l j = 0 (u(i) - θ T (j)p) 2 参数 θ 自校正的方向应该沿着目标函数对其梯 度的负方向,由式(11)确定 θ 的校正方向, θ(j + 1) - θ(j) = p(u(k) - θ T (j)p) (11) 2.3 DAFLS 逼近滑模控制 先考虑 T1 = lT2 , l ∈ Ζ 的情况下,AFLS 输出 (10)逼近普通离散 SMC 的误差。 定理 2 对于准滑模控制( 4),若 AFLS 以式 (11)为自适应机构且其采样周期 T2 远比准滑模控 制(4)的采样周期 T1 小,则 AFLS(10)逼近准滑模 控制(4)的误差渐近收敛。 证明 在自适应律( 11) 下选取逼近误差的 Lyapunov 函数为 v(j) = 1 2 (u(k) - θ (j) T p) 2 (12) 若 AFLS 的采样周期远比控制器 u(k) 的采样周期 小则对式(12)有 Δv(j) = 1 2 [θ (j + 1) T p] 2 - 1 2 ([θ (j) T p] 2 + u(k) [θ(j) - θ(j + 1)]) T p 利用式(11)有 Δv(j) = 1 2 (p T p) 2 (u(k) - θ (j) T p) 2 + p T p(u(k) - θ (j) T p)θ (j) T p - p T p(u(k) - θ (j) T p)· u(k) = 1 2 (p T p) 2 (u(k) - θ (j) T p) 2 - p T p (u(k) - θ (j) T p) 2 (13) 因为 p 是模糊基函数向量,所以 0 < p T p ≤ 1。 则由 式(13)可得 Δv(j) = v(j + 1) - v(j) < 0 证毕。 接着,为进一步加强滤波效果以消除抖振,在 AFLS 基础上引入动态自适应模糊逻辑系统( dy⁃ namic adaptive fuzzy logic system, DAFLS)。 考虑 n 阶连续 DAFLS,则 第 2 期 张晓宇,等:一种离散直接自适应模糊滑模控制 ·199·

·200 智能系统学报 第9卷 vm)+dn-1a-D+…+d+d。=y0p(14) 证明选取逼近误差的Lyapunov函数为 式中:d,(i=0,1,…,n-1)、y均为DAFLS的动态 V(G)=2(G)-0'G)p)2+(u,(k)-0'G)p)月 参数。 其一阶差分为 假设(14)的动态形成低通滤波。将其离散化 得到离散的DAFLS, △VG)=1/2({[CAnG)]2+[Cb0(G)p])2- (k)[r0+T1z1+…+Tnz]=w0p(15) [Cn(j)]2+2CAn(j)Cb 0"(j)p+ 式中:r:(i=0,1,…,n)、w是导出的参数。运用 Cn(j)0(j)p -0(j+1)pCAn(j)- DAFLS逼近滑模控制式(4)。 0'G+1)pCb0')p+ 将滤波器(式(14))看作一个子系统,可以通过 1/2(1[0'G+1)p]2-[0'U)p]2)+ 选择状态变量,将式(15)变为状态空间模型, [0'(G+1)p]2-[0()p]2+ 2u,(k)[0)-0G+1)]'p= (n(j+1)=An(j)+b0(j)p (16) (j)=Cn(j) 1/2(1[CAn)]2+[Cb0'U)p])2- 式中:0'p看作是子系统(16)的输入,x()是这个 [Cn(j)]+CAn(j)Cb0"(j)p+Cn(j)0(j)p- 子系统的输出。定理2已经证明如果没有引入滤波 0'G+1)pCAG)-0'G+1)pCb0'()p+ 器动态,AFLS逼近滑模控制的误差是收敛的。现在 3[0G+1p2-20Upl)+ 选取新的关于其输出()与滑模控制之间误差的 2u,(k)[0)-0G+1)]'p 正定Lyapunov函数,其一阶差分负定,则DAFLS的 输出()在适当的自适应律下逼近滑模控制的误 若代入0(G+1)-0G)=p(u(k)-0'()p),有 差仍然收敛。DAFLS中的动态滤波器可以看作是 40=2[CAn0]+[Ch00p]- 线性系统(16)。 [Cm)]2}+Cm)0'()p- 3主要结果 [0()p]2Cb-0'(G)pCA)(1-Cb) p'p(u.(k)-0'G)p)·(CAn(j)+Cb0'(U)p)+ 3.1动态AFLS的逼近误差 定理3对于准滑模控制(4),若DAFLS(16) 3u(-0Gp1ypp产+ 以(11)为自适应机构且其参数满足:ACCA半负 30(U)p[u,(k)-0'(j)p]p'p- 定,Cb=1,采样周期T2远比准滑模控制(4)的采样 2u,(k)[u,(k)-0'(G)p]pp (17) 周期T,小,则DAFLS(16)逼近准滑模控制(4)的误 若Cb=1,式(17)变为 差渐近收敛。 AG)=21[CAnG)]2-[0'G)p]2-[C0)]2}+Cm)'p-pp(u,(k)- p)CA)+-2t()p 4G)=[CAnG)]2-2[CAm)+p'p(u,()-0rGp)12- IC()p+2()-P'](k)-p 若矩阵A、C满足Lyapunov方程 v0)=u,(k)=0(U)p AT CCA-CC=-0 成立。根据Lyapunov理论逼近误差收敛。证毕。 其中Q=Q,Q>0。则有[CAn)]2≤[Cm()]2 3.2近似逼近下的滑模可达性 则 定理4对于准滑模控制(4),若DAFLS(16) △V)≤2[(p'p)2-p'p][u,(k)-0'U)p]2 以(11)为自适应机构且其参数且满足定理2内容, 又因为p是模糊基向量则pp≤1。因此有 则滑模到达条件(6)能够得到满足。 AV()≤0成立。若4V()=0成立则有 证明考虑不等式离散到达条件
v (n) + dn-1 v (n-1) + … + d1 v · + d0 = γ θ T p (14) 式中: di(i = 0,1,…,n - 1) 、 γ 均为 DAFLS 的动态 参数。 假设(14)的动态形成低通滤波。 将其离散化 得到离散的 DAFLS, v(k)[r0 + r1 z -1 + … + rn z -n ] = ω θ T p (15) 式中: ri(i = 0,1,…,n) 、 ω 是导出的参数。 运用 DAFLS 逼近滑模控制式(4)。 将滤波器(式(14))看作一个子系统,可以通过 选择状态变量,将式(15)变为状态空间模型, η(j + 1) = Aη(j) + b θ T (j)p v(j) = Cη(j) { (16) 式中: θ T p 看作是子系统(16)的输入, v(j) 是这个 子系统的输出。 定理 2 已经证明如果没有引入滤波 器动态,AFLS 逼近滑模控制的误差是收敛的。 现在 选取新的关于其输出 v(j) 与滑模控制之间误差的 正定 Lyapunov 函数,其一阶差分负定,则 DAFLS 的 输出 v(j) 在适当的自适应律下逼近滑模控制的误 差仍然收敛。 DAFLS 中的动态滤波器可以看作是 线性系统(16)。 3 主要结果 3.1 动态 AFLS 的逼近误差 定理 3 对于准滑模控制(4),若 DAFLS(16) 以(11)为自适应机构且其参数满足: A T C TCA 半负 定, Cb = 1,采样周期 T2 远比准滑模控制(4)的采样 周期 T1 小,则 DAFLS(16)逼近准滑模控制(4)的误 差渐近收敛。 证明 选取逼近误差的 Lyapunov 函数为 V(j) = 1 2 (v(j) - θ T (j)p) 2 + (us(k) - θ T (j)p) 2 其一阶差分为 ΔV(j) = 1 / 2({[CAη(j)] 2 + [Cb θ T (j)p]) 2 - [Cη(j)] 2 + 2CAη(j)Cb θ T (j)p} + Cη(j) θ T (j)p - θ T (j + 1)pCAη(j) - θ T (j + 1)pCb θ T (j)p + 1 / 2({[θ T (j + 1)p] 2 - [θ T (j)p] 2 }) + [θ T (j + 1)p] 2 - [θ T (j)p] 2 + 2us(k) [θ(j) - θ(j + 1)] T p = 1 / 2({[CAη(j)] 2 + [Cb θ T (j)p]) 2 - [Cη(j)] 2 } + CAη(j)Cb θ T (j)p + Cη(j) θ T (j)p - θ T (j + 1)pCAη(j) - θ T (j + 1)pCb θ T (j)p + 3 2 ([θ T (j + 1)p]) 2 - 3 2 ([θ T (j)p]) 2 + 2us(k) [θ(j) - θ(j + 1)] T p 若代入 θ(j + 1) - θ(j) = p(u(k) - θ T (j)p) ,有 ΔV(j) = 1 2 {[CAη(j)] 2 + [Cb θ T (j)p] 2 - [Cη(j)] 2 } + Cη(j) θ T (j)p - [θ T (j)p] 2Cb - θ T (j)pCAη(j)(1 - Cb) - p T p(us(k) - θ T (j)p)·(CAη(j) + Cb θ T (j)p) + 3 2 ([us(k) - θ T (j)p]) 2 (p T p) 2 + 3 θ T (j)p[us(k) - θ T (j)p] p T p - 2us(k)[us(k) - θ T (j)p] p T p (17) 若 Cb = 1, 式(17)变为 ΔV(j) = 1 2 {[CAη(j)] 2 - [θ T (j)p] 2 - [Cη(j)] 2 } + Cη(j) θ T (j)p - p T p(us(k) - θ T (j)p)CAη(j) + 3 2 (p T p) 2 - 2 p T p é ë ê ê ù û ú ú us(k) - θ T [ (j)p] 2 ΔV(j) = [CAη(j)] 2 - 1 2 CAη(j) + p T [ p(us(k) - θ T (j)p) ] 2 - 1 2 Cη(j) - θ T [ (j)p] 2 + 2 (p T p) 2 - p T [ p] us(k) - θ T [ (j)p] 2 若矩阵 A、C 满足 Lyapunov 方程 A T C TCA - C TC = - Q 其中 Q = Q T ,Q > 0。 则有 [CAη(j)] 2 ≤ [Cη(j) ] 2 则 ΔV(j) ≤ 2 (p T p) 2 - p T [ p] us(k) - θ T [ (j)p] 2 又因为 p 是模糊基向量则 p T p ≤ 1 。 因此有 ΔV(j) ≤ 0 成立。 若 ΔV(j) ≡ 0 成立则有 v(j) = us (k) = θ T (j)p 成立。 根据 Lyapunov 理论逼近误差收敛。 证毕。 3.2 近似逼近下的滑模可达性 定理 4 对于准滑模控制(4),若 DAFLS(16) 以(11)为自适应机构且其参数且满足定理 2 内容, 则滑模到达条件(6)能够得到满足。 证明 考虑不等式离散到达条件, ·200· 智 能 系 统 学 报 第 9 卷

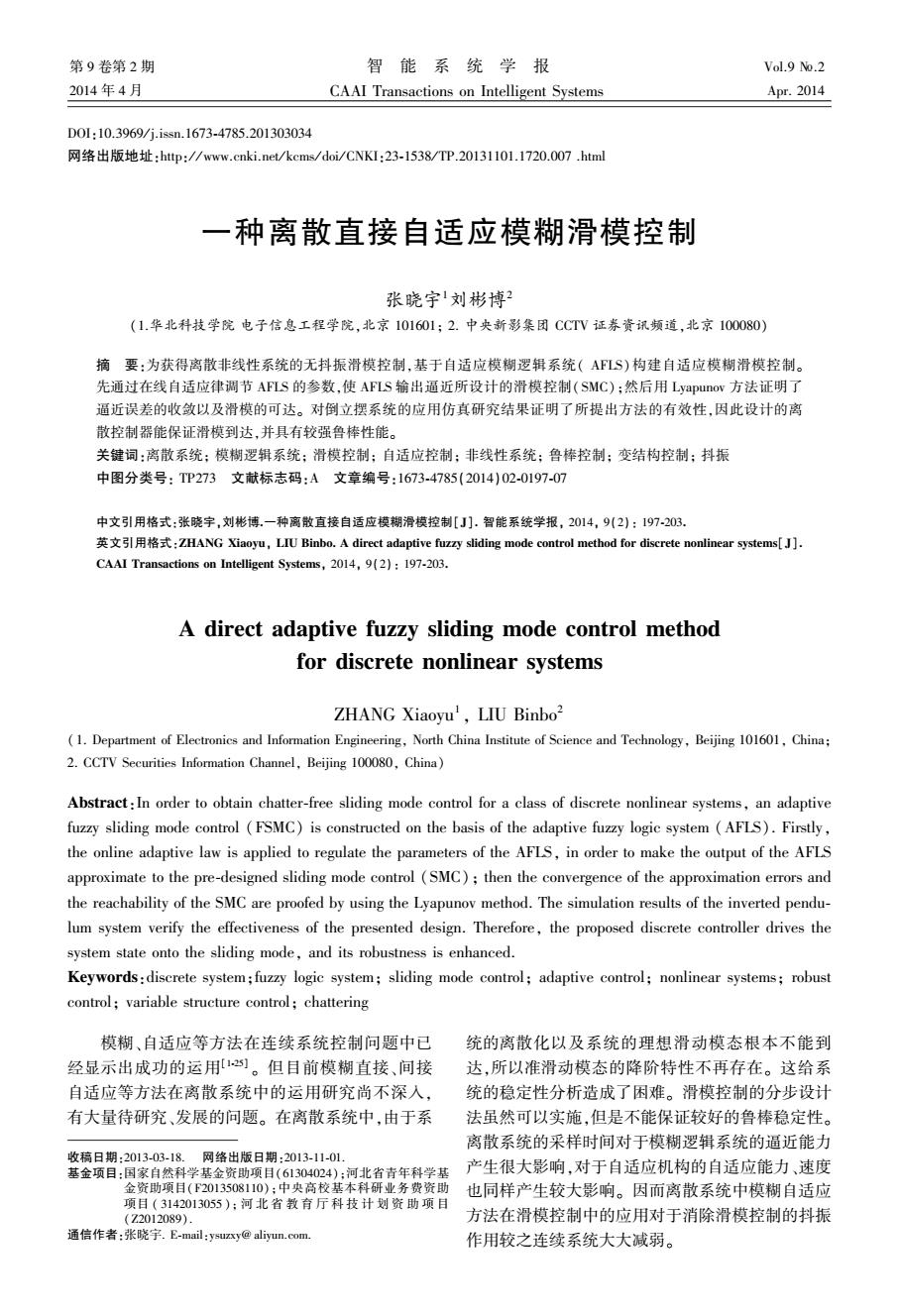
第2期 张晓宇,等:一种离散直接自适应模糊滑模控制 ·201. 4<-(4n [△s+1]2=[4f+△g4k-(qT:-1)s4- kasgns +g(un -ua)+ △s+1=sk+1-s4=4f+△g4H-(qT1-1)sg- 2sg[Af Agun -(qT -1)s:- k2sgns:+g(uA-uh)-s4 kasgnst +g(un-u)] s△sk+1=-s2+s4[4f+△gua- 若要使得到达条件满足,将sAs1、[4+1]尸 (qT:-1)st -k2sgns +g(un -ua) 代入得 <-4+4g-(g-14-4g,+g-)刀 s>[Af Agun -(qT:-1)st-kasgns:+g(un -ua)]2 (18) |s:l>|4f+△g4A-(9T1-1)s4-k2 sgns:+g(4g-)川 由式(18)可见,只要山g逼近“4误差为零则与(9) 是等同的。证毕。 4倒立摆系统应用仿真 一阶倒立摆系统的离散模型如下: (k+2)=0(k+)T0)+ (mo m)gsin (k)- m[0k+1)-0()]2sin28k) 2 Gocos 0(k)u(k) mol +ml sin20(k) mol ml sin20(k) 式中:0(k)是摆角位移,u(k)是小车控制电压。 通过图1、2可以得出,普通离散SMC稳态抖动 当应用普通SMC方法控制和应用本文提出的 很大,而本文提出的DAFLSMC消除了抖动。比较 控制方法时得到摆角位移曲线对比如图1所示,控 DAFLSMC控制电压曲线与在同等条件下实施普通 制电压曲线对比如图2所示。 SMC的控制电压曲线,如图2。因为设计的DAFLS 0.3 逼近SMC的采样时间是0.01s而被控对象及普通 0.2 SMC采样时间是O.1s。因此DAFLS输出的控制电 压更加光滑。 为了观察DAFLS的滤波效果把滤波前后的控 制电压曲线作对比如图3所示。从图3中可见加入 -0.2 DAFLSMC 普通SMC 了动态滤波的DAFLS后控制信号的高频抖动部分 -0.3 被滤掉了。 0.4 2 3 5 0.05 tis 图1SMC和DAFLSMC控制下摆角位移曲线对比 -AFLSMC 0 Fig.1 Angle displacement contract curves of pendulum DAFLSMC for SMC and DAFLSMC 0.05 0.051 -0.1 -0.15 -0.05 0 2 DAFLSMC 0. 图3滤波器前后的控制电压曲线对比 普通SMC Fig.3 Control voltage comparison of AFLSMC and DAFLSMC -0.15 3 4 5 t/s 为验证本文所提出方法的鲁棒性能,保持控制器 图2SMC和DAFLSMC控制下电压曲线对比 参数不变的情况下,在仿真t=10s时,给摆角位移施 Fig.2 Control voltage contract curves for SMC and 加幅度为0.3rad的脉冲千扰,系统控制效果如图4、 DAFLSMC
skΔsk+1 < - 1 2 (Δsk+1 ) 2 Δsk+1 = sk+1 - sk = Δf + Δgufk - (qT1 - 1)sk - k2 sgnsk + g(ufk - usk) - sk skΔsk+1 = - s 2 k + sk[Δf + Δgufk - (qT1 - 1)sk - k2 sgnsk + g(ufk - usk)] [Δsk+1 ] 2 = [Δf + Δgufk - (qT1 - 1)sk - k2 sgnsk + g(ufk - usk)] 2 + s 2 k - 2sk[Δf + Δgufk - (qT1 - 1)sk - k2 sgnsk + g(ufk - usk)] 若要使得到达条件满足,将 skΔsk+1 、 [Δsk+1 ] 2 代入得 - 1 2 s 2 k < - 1 2 [Δf + Δgufk - (qT1 - 1)sk - k2 sgnsk + g(ufk - usk)] 2 s 2 k > [Δf + Δgufk - (qT1 - 1)sk - k2 sgnsk + g(ufk - usk)] 2 sk > Δf + Δgufk - (qT1 - 1)sk - k2 sgnsk + g(ufk - usk) ì î í ï ïï ï ï (18) 由式(18)可见,只要 ufk 逼近 usk 误差为零则与(9) 是等同的。 证毕。 4 倒立摆系统应用仿真 一阶倒立摆系统的离散模型如下: θ(k + 2) = 2 T 2 s θ(k + 1) - 1 T 2 s θ(k) + (m0 + m1 )gsin θ(k) - m1 l 1 2T 2 s [θ(k + 1) - θ(k) ] 2 sin 2θ(k) m0 l 1 + m1 l 1 sin 2 θ(k) - G0 cos θ(k) u(k) m0 l 1 + m1 l 1 sin 2 θ(k) 式中: θ(k) 是摆角位移, u(k) 是小车控制电压。 当应用普通 SMC 方法控制和应用本文提出的 控制方法时得到摆角位移曲线对比如图 1 所示,控 制电压曲线对比如图 2 所示。 图 1 SMC 和 DAFLSMC 控制下摆角位移曲线对比 Fig.1 Angle displacement contract curves of pendulum for SMC and DAFLSMC 图 2 SMC 和 DAFLSMC 控制下电压曲线对比 Fig. 2 Control voltage contract curves for SMC and DAFLSMC 通过图 1、2 可以得出,普通离散 SMC 稳态抖动 很大,而本文提出的 DAFLSMC 消除了抖动。 比较 DAFLSMC 控制电压曲线与在同等条件下实施普通 SMC 的控制电压曲线,如图 2。 因为设计的 DAFLS 逼近 SMC 的采样时间是 0.01 s 而被控对象及普通 SMC 采样时间是 0.1 s。 因此 DAFLS 输出的控制电 压更加光滑。 为了观察 DAFLS 的滤波效果把滤波前后的控 制电压曲线作对比如图 3 所示。 从图 3 中可见加入 了动态滤波的 DAFLS 后控制信号的高频抖动部分 被滤掉了。 图 3 滤波器前后的控制电压曲线对比 Fig.3 Control voltage comparison of AFLSMC and DAFLSMC 为验证本文所提出方法的鲁棒性能,保持控制器 参数不变的情况下,在仿真 t = 10 s 时,给摆角位移施 加幅度为 0.3 rad 的脉冲干扰,系统控制效果如图 4、 第 2 期 张晓宇,等:一种离散直接自适应模糊滑模控制 ·201·