Discussion() Case 1 S+L<P+O: Mechanism Frame Crank-rocker Ground either link adjacent to the shortest Double-crank Ground the shortest link *Double-rocker Ground the link opposite the shortest *The coupler makes a full revolution ■Case2S+L>P+Q.: All inversions will be triple-rocker,no link can fully rotate. ■ Case 3 S+L=P+Q: At the change points,the output behavior will become indeterminate.The common used mechanisms are parallelogram and antiparallelogram
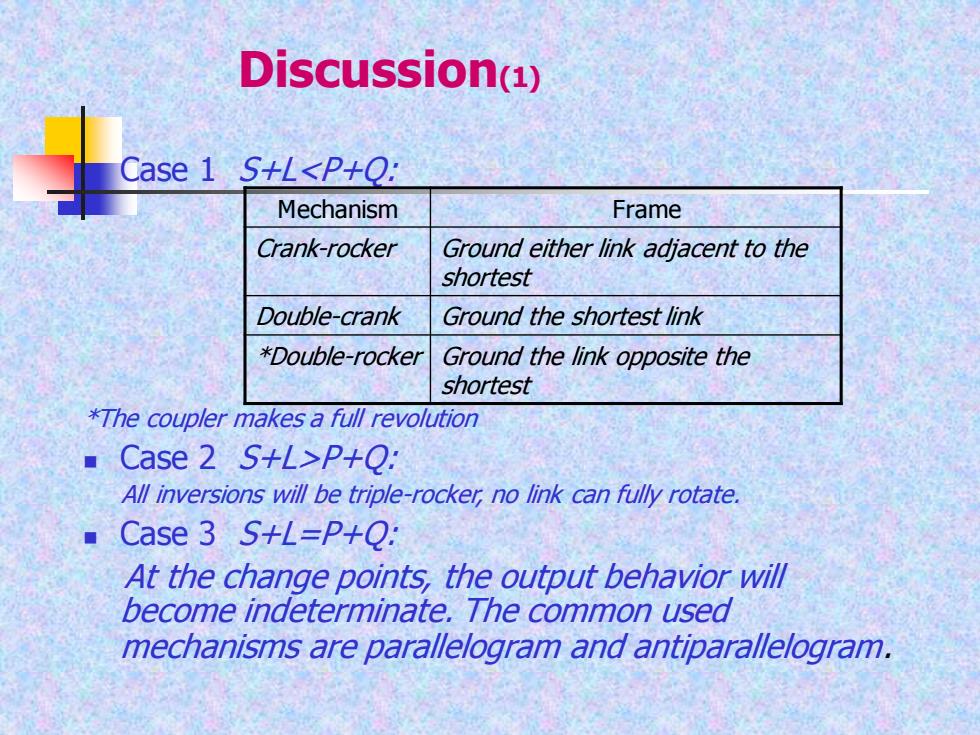
Discussion(1) ◼ Case 1 S+L<P+Q: *The coupler makes a full revolution ◼ Case 2 S+L>P+Q: All inversions will be triple-rocker, no link can fully rotate. ◼ Case 3 S+L=P+Q: At the change points, the output behavior will become indeterminate. The common used mechanisms are parallelogram and antiparallelogram. Mechanism Frame Crank-rocker Ground either link adjacent to the shortest Double-crank Ground the shortest link *Double-rocker Ground the link opposite the shortest
Discussion(2) Change points,and indeterminate behavior. 2 C> 7777 D B How to solve this problem?
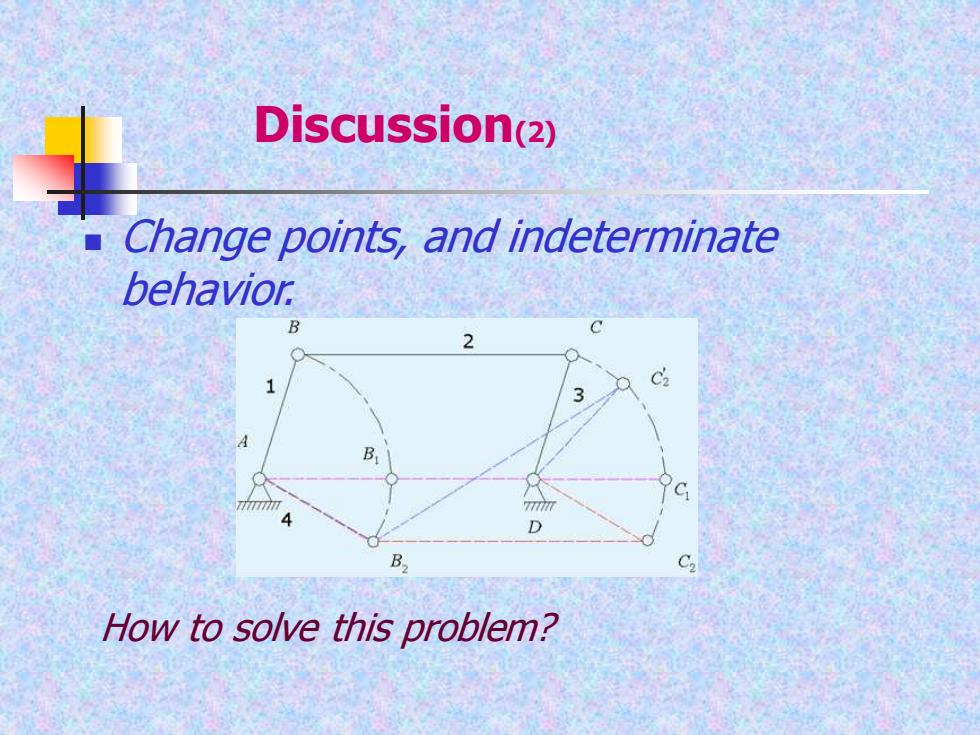
Discussion(2) ◼ Change points, and indeterminate behavior. How to solve this problem?
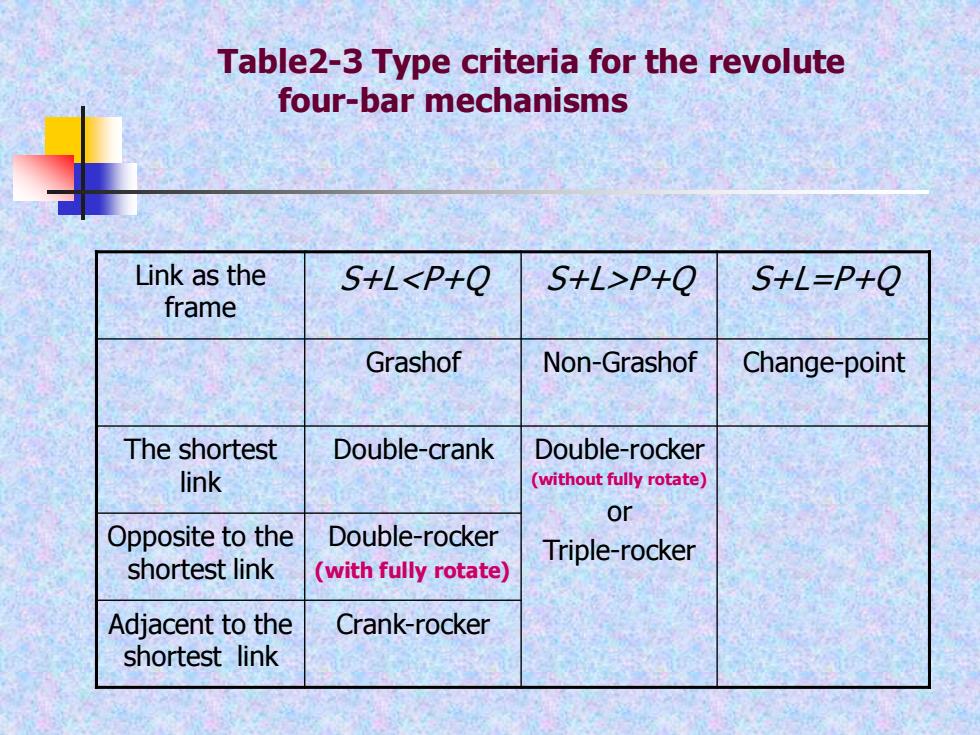
Table2-3 Type criteria for the revolute four-bar mechanisms Link as the S+L<P+Q S+L>P+Q S+L-P+Q frame Grashof Non-Grashof Change-point The shortest Double-crank Double-rocker link (without fully rotate) or Opposite to the Double-rocker shortest link Triple-rocker (with fully rotate) Adjacent to the Crank-rocker shortest link
Table2-3 Type criteria for the revolute four-bar mechanisms Link as the frame S+L<P+Q S+L>P+Q S+L=P+Q Grashof Non-Grashof Change-point The shortest link Double-crank Double-rocker (without fully rotate) or Triple-rocker Opposite to the shortest link Double-rocker (with fully rotate) Adjacent to the shortest link Crank-rocker
2.Fourbar Quick return(急回特性) The toggle positions are determined by the colinearity of the B two of the moving 快速 links.They also define the limits of D motion of the driven rocker Toggle position 极限位置
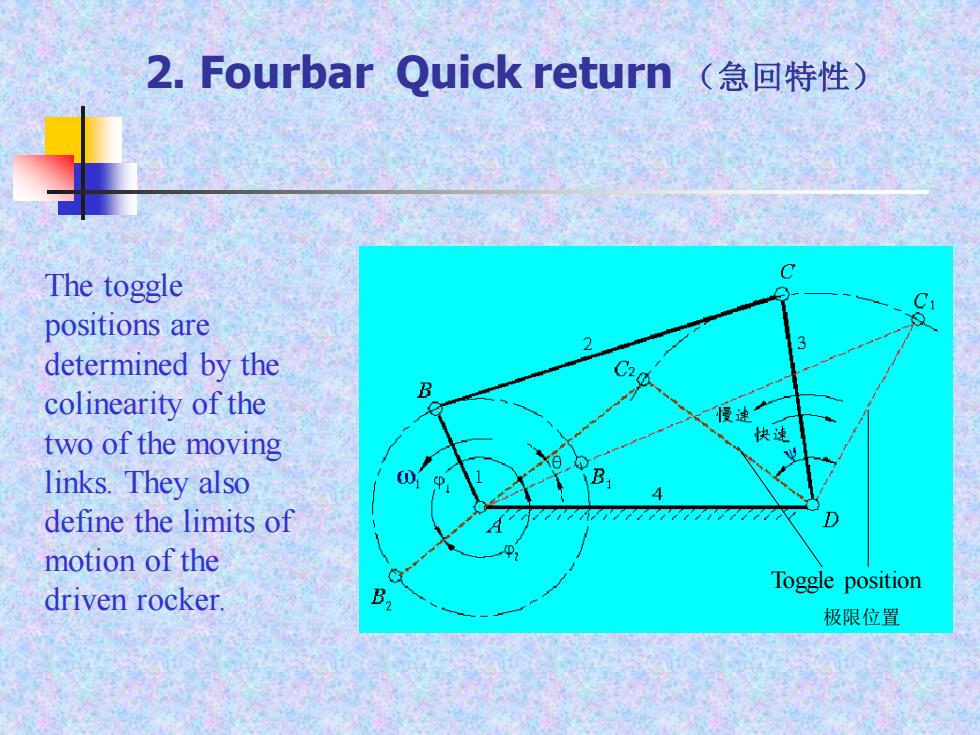
2. Fourbar Quick return (急回特性) Toggle position 极限位置 The toggle positions are determined by the colinearity of the two of the moving links. They also define the limits of motion of the driven rocker