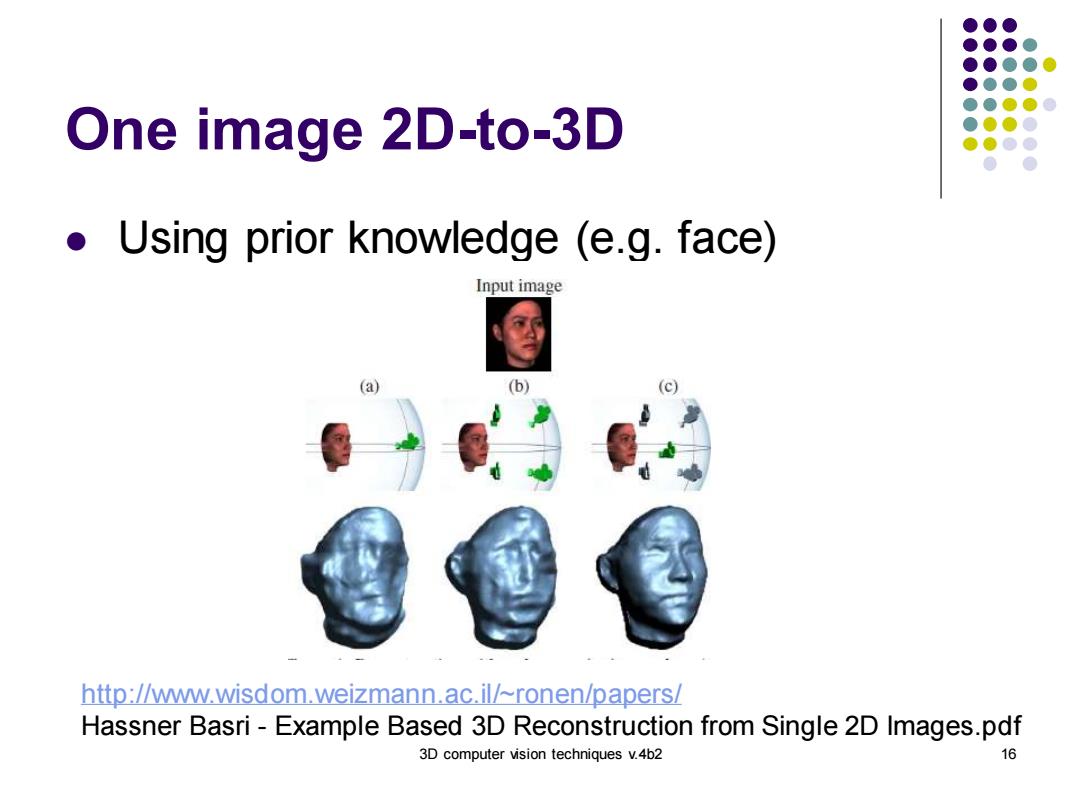
One image 2D-to-3D Using prior knowledge (e.g.face) Input image (a) (b) http://www.wisdom.weizmann.ac.il/-ronen/papers/ Hassner Basri-Example Based 3D Reconstruction from Single 2D Images.pdf 3D computer vision techniques v.4b2 16
3D computer vision techniques v.4b2 16 One image 2D-to-3D ⚫ Using prior knowledge (e.g. face) http://www.wisdom.weizmann.ac.il/~ronen/papers/ Hassner Basri - Example Based 3D Reconstruction from Single 2D Images.pdf
Two-image 2D-to-3D reconstruction 3D computer vision techniques v.4b2 17
3D computer vision techniques v.4b2 17 Two-image 2D-to-3D reconstruction
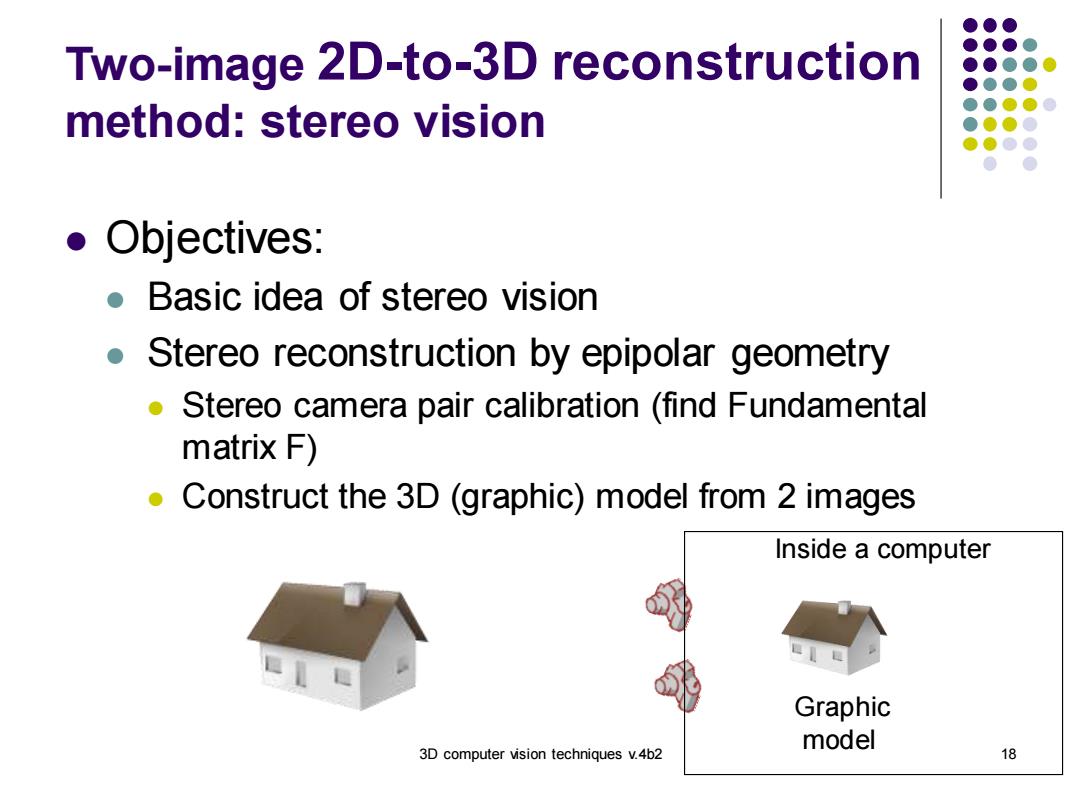
Two-image 2D-to-3D reconstruction method:stereo vision ●Objectives: Basic idea of stereo vision ● Stereo reconstruction by epipolar geometry Stereo camera pair calibration (find Fundamental matrix F) Construct the 3D(graphic)model from 2 images Inside a computer Graphic model 3D computer vision techniques v.4b2 18
3D computer vision techniques v.4b2 18 Two-image 2D-to-3D reconstruction method: stereo vision ⚫ Objectives: ⚫ Basic idea of stereo vision ⚫ Stereo reconstruction by epipolar geometry ⚫ Stereo camera pair calibration (find Fundamental matrix F) ⚫ Construct the 3D (graphic) model from 2 images Graphic model Inside a computer
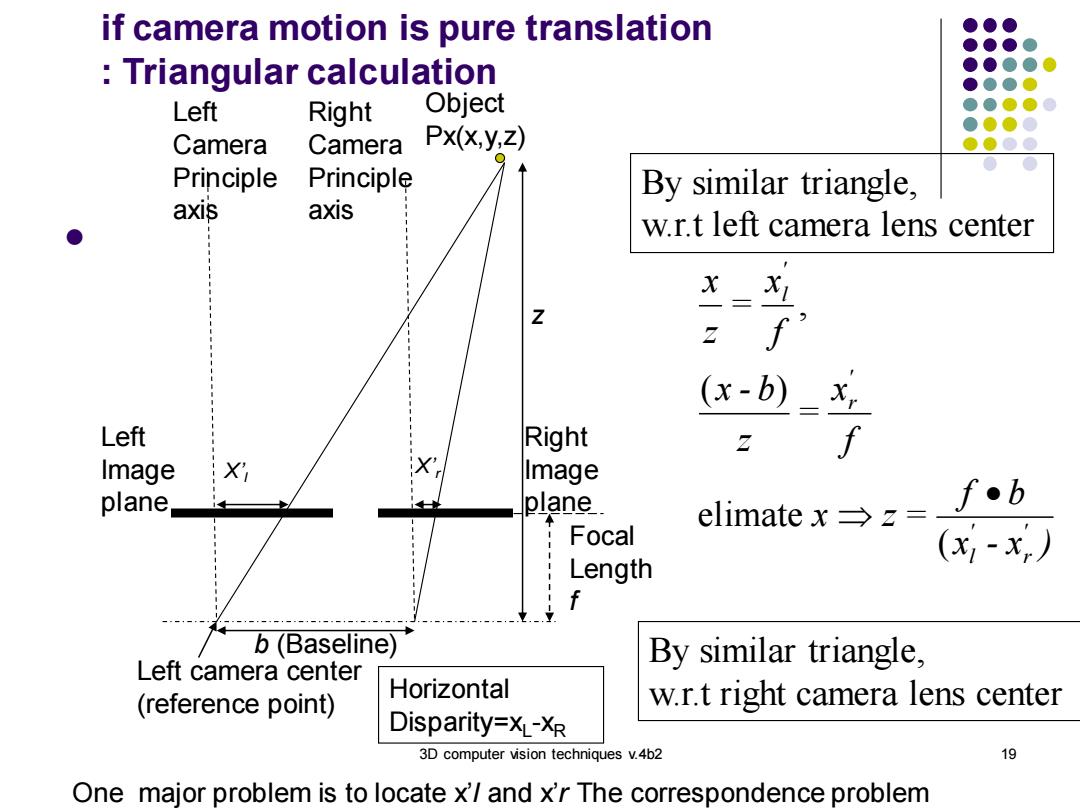
if camera motion is pure translation Triangular calculation Left Right Object Camera Camera Px(x,y,Z) Principle Principle By similar triangle, axis axis ● w.r.t left camera lens center X-X Z (x-b) Left Right Image Image plane plane f·b elimate x→z= Focal (x-x,) Length f b(Baseline) By similar triangle, Left camera center Horizontal (reference point) w.r.t right camera lens center Disparity=XL-XR 3D computer vision techniques v.4b2 19 One major problem is to locate x/and x'r The correspondence problem
3D computer vision techniques v.4b2 19 ⚫ X’l X’r Focal Length f Object Px(x,y,z) z Left camera center (reference point) Horizontal Disparity=xL -xR b (Baseline) Left Camera Principle axis Right Camera Principle axis Left Image plane Right Image plane , ( ) elimate ( ' l ' r ' ' l r x x = z f x - b x = z f f b x z = x - x ) • By similar triangle, w.r.t left camera lens center By similar triangle, w.r.t right camera lens center if camera motion is pure translation : Triangular calculation One major problem is to locate x’l and x’r The correspondence problem
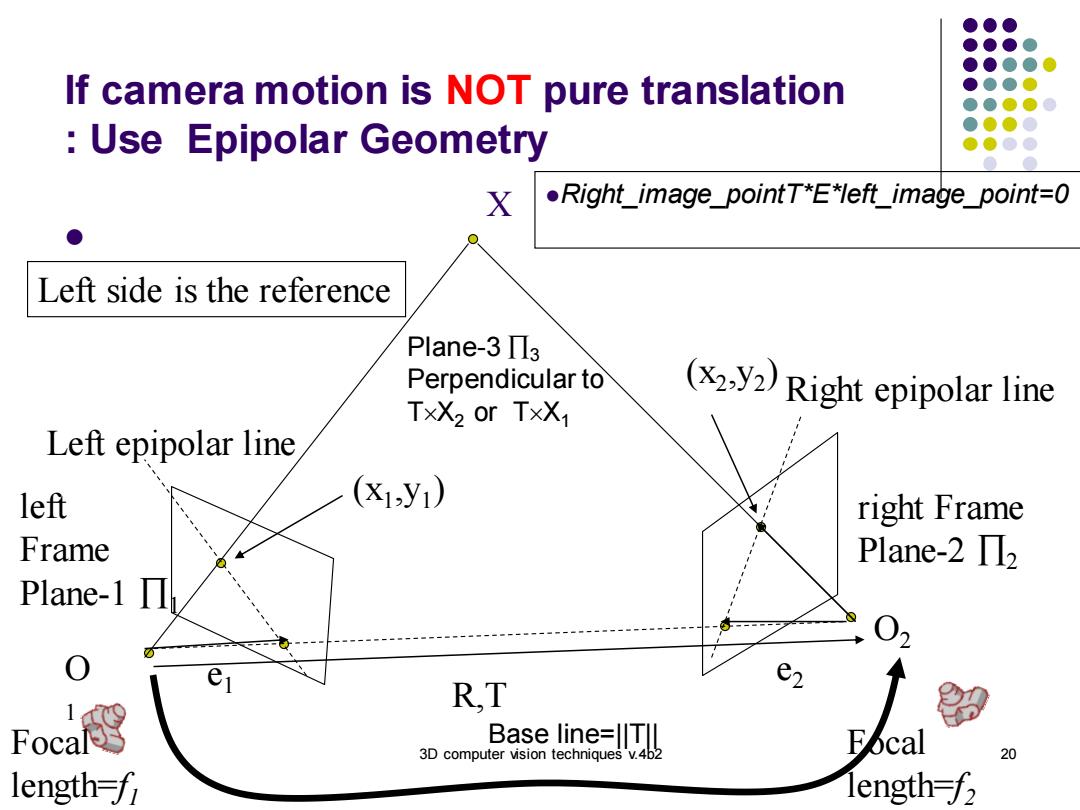
If camera motion is NOT pure translation Use Epipolar Geometry X .Right image_pointT*E*left_image_point=0 Left side is the reference Plane-3Π3 Perpendicular to TxX2 or TxX1 (X)Right epipolar line Left epipolar line left (X1y1) right Frame Frame Plane-2Π2 Plane-1Π e R.T 0 meae ine Eocal 20 length-f length-f2
3D computer vision techniques v.4b2 20 If camera motion is NOT pure translation : Use Epipolar Geometry ⚫ X O2 O 1 right Frame Plane-2 2 left Frame Plane-1 1 e1 e2 Left epipolar line Right epipolar line R,T (x1 ,y1 ) (x2 ,y2 ) Left side is the reference Focal length=f1 Focal length=f2 Base line=||T|| Plane-3 3 Perpendicular to TX2 or TX1 ⚫Right_image_pointT*E*left_image_point=0