
⊙y4 ⊙4k 图2-9用于线路-变压器维的电流速断保护 图2-10限时电流速断动作特性的分析 允许的,因为保护2和保护1安装在不同的地点,使用的是不同的电流互感器和继电器, 因此它们之间的特性很难完全一样,如果正好遇到保护1的电流速断出现负误桌,其保折 范围比计算值缩小,而保护2的限时速断是正误差,其保护范围比计算值增大,那么实际 上,当计算的保护范围末端短路时,就会出现保护1的电流速断已不能动作,而保产2的 限时速断仍然会起动的情况。由于故障位于线路B-C的范围以内,当其电流速断不动之 后、本应由保护1的限时速断切除故障,而如果保护2的限时速断也起动了,其结果就是 两个保护的限时速断同时动作于跳瞒,因而保护2失去了选择性。为了避免这种情况的发 生、就不能采用两个电流相等的整定方法,而必须采用1“:·2>':!,引入可靠系数 K”,得 I:.3=K"1‘:.1 (2·14) 对K”,考虑到短路电流中的非周期分量已经衰减,故可选取得比速断保护的K:小一些. 般取为1.1-1.2。 2动作时限的选挥 从以上分析中已经得出,限时速断的动作时限,应选择得比下一条线路速断保护的 动作时限(高出一个时间阶段,即 (215) 从尽快切除故障的观点来看,:应越小越好,但是为了保证两个保护之间动作的选择 性,其值又不能选择得太小。现以线路B-C上发生故障时,保护2与保护1的配合关系为 例,说明确定!的原则如下: (1)41应包括故障线路断路器DL的跳闸时间'。L,(即从操作电流送入跳闸线圈 TQ的解间算起,直到电弧熄灭的瞬间为止),因为在这~段时间里,故章并未消除。因 此保护2在故障电流的作用下仍处于起动状态。 (2)应包括故障线路保护1中时间继电器的实际动作时间比整定值:{要大:!才 能动作。〈当保护1为速断保护时,保护装登中不用时间继电器,即可以不考虑这一项的 影响) (3)r应包括保护2中时间继电器可能比预定的时间提早,:动作闭合它
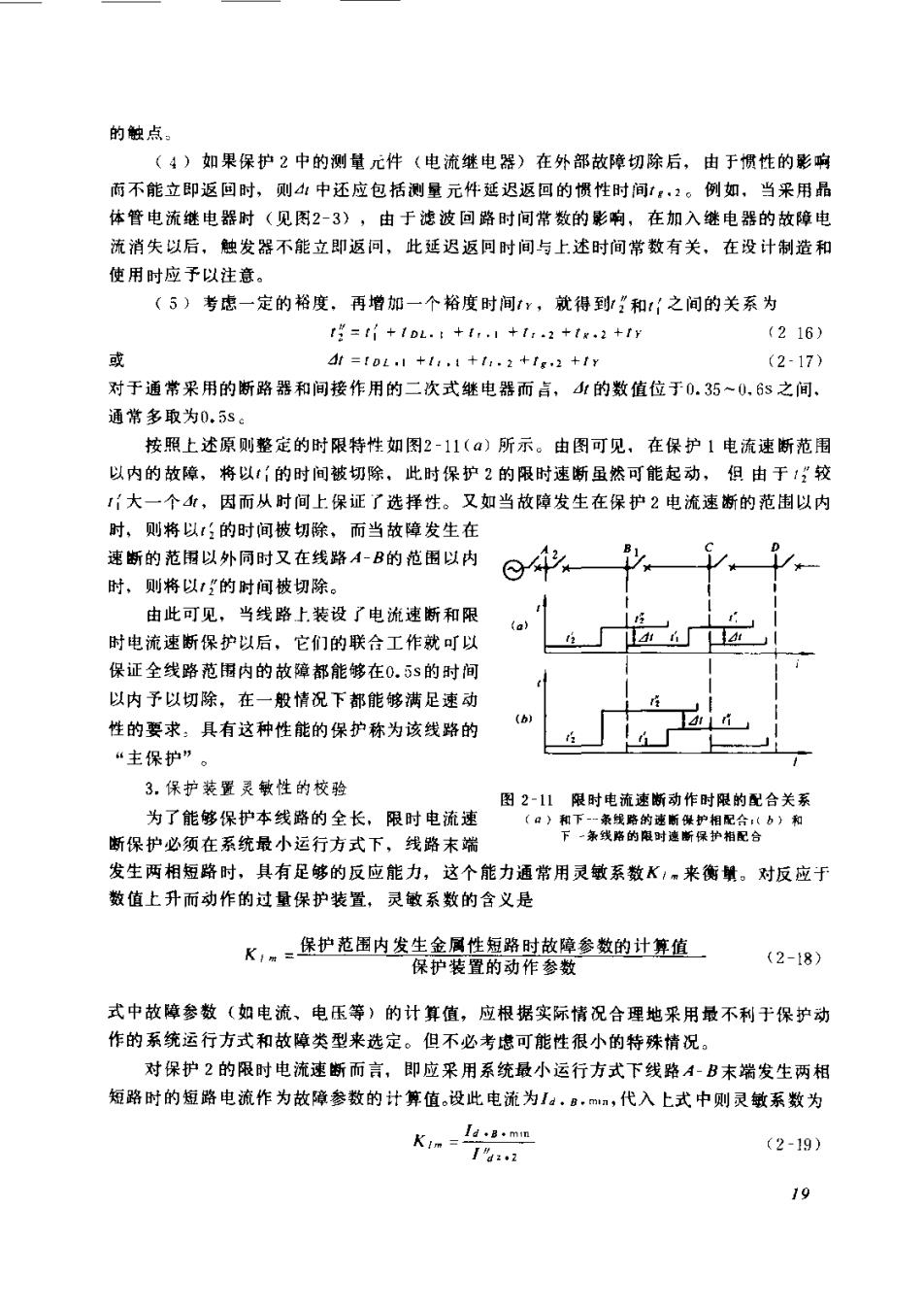
的触点。 (4)如果保护2中的测量元件《电流继电器)在外部故障切除后,由于惯性的影响 而不能立即返回时,则山中还应包括测量元件延迟返回的惯性时间1,2。例如,当采用品 体管电流继电器时(见图2-3),由于滤波回路时间常数的影响,在加入继电器的放障电 流消失以后,触发器不能立即返问,此延迟返回时间与上述时间常数有关,在设计制造和 使用时应予以注意。 (5)考虑一定的裕度,再增加一个裕度时间1,就得到和{之间的关系为 t=ti+1DL.t+I,,1+1r.2+1g,2+1y (216) =f01+1+12+1g2+1y (2-17) 对于通常采用的断路器和间接作用的二次式继电器而言,的数值位于0.35~0,6s之间, 通常多取为0.5s 按照上述原则整定的时限特性如图2-11()所示。由图可见,在保护1电流速断范围 以内的故障,将以的时间被切除,此时保护2的限时速断虽然可能起动,但由于!较 大一个重,因而从时间上保证了选择性。又如当故障发生在保护2电流速断的范制以内 时、则将以的时间被切除,而当放障发生在 速断的范围以外同时又在线路A-B的范围以内 ⊙华, 时、则将以1的时间被切除。 由此可见,当线路上.装设了电流速断和限 (a) 时电流速断保护以后、它们的联合工作就可以 保证全线路范围内的故障都能够在0.5s的时间 以内予以切除,在一般情况下都能够满足速动 性的要求,具有这种性能的保护称为该线路的 “主保护” 3.保护装置灵敏性的校验 图2-1山限时电流速断动作时限的配合关系 为了能够保护本线路的全长,限时电流速 断保护必须在系统最小运行方式下,线路末端 发生两相短路时,具有足够的反应能力,这个能力通常用灵敏系数K:,来衡鳞,对反应于 数值上升而动作的过量保护装置,灵敏系数的含义是 K,。。保护范围内发生金属性短路时越障参数的计算值 保护装登的动作参数 (2-18 式中故障参数(如电流、电压等)的计算值,应根据实际情况合理地采用最不利于保护动 作的系统运行方式和故障类型来选定。但不必考虑可能性很小的特殊情况。 对保护2的限时电流速断而言,即应采用系统最小运行方式下线路A-B末端发生两相 短路时的短路电流作为故障参数的计算值,设此电流为I。,a,m,代入上式中则灵敏系数为 Kim =la.mm 1”:,2 (2-19) 19

为了保证在线路末端短路时,保护装置一定能够动作,对限时电流速断保护应要求 K1则>1.3~1,5(参见附录二) 为什么在进行校验时必须满足以上要求?这是考虑到当线路末端短路时,可能会出现 一些不利于保护起动的因素,而在实际上存在这些因素时,为使保护仍然能够动作,显然 就必须留一定的裕度。不利于保护起动的因素如下: 〔1)故障点一般都不是金属性短路,而是存在有过渡电阻,它将使短路电流减小, 因而不利于保护装置动作: 〔2)实际的短路电流由于计算误差或其他原因而小于计算值: (3)保护装置所使用的电流互感器、在短路电流通过的情况下,一般都具有负误 差,因此使实际流入保护装置的电流小于按额定变比折合的数值: (4)保护装登中的继电器,其实际起动数值可能其有的正误差; 〔5)紫虎一定的裕度 当校验灵敏系数不能满足要求时,那就意味着将来真正发生内部故降时,由十上述不 利因素的影响保护可能起动不了,也就是达不到保护线路全长的月的,这是不允许的。为 了解决这个问题,通常都是考虑进一步延伸限时电流速断的保护范围,使之与下一条线路 的限时电流速断相配合,这样其动作时限就应该选择得比下一条线路限时速断的时限再腐 一个41,~·般取为1~1.25,按照这个原则整定的时限特性如图211(b)所示, 此时 1=1"+d0 (2-201 因此、保护范围的伸长,必然导致动作时限的升高。 4,限时电流速断保护的单相原理接线 限时电流速断保护的单相原理接线如图2-12所示,它和电流速断保护接线(见图26) 的主要区别是用时间继电器代替了原来的中间继电器,这样当电流继电器动作后,还必须 经过时间继电器的延时:才能动作于跳闸。而如果在:以前故障已经切除,则电流继电器 立即返回,整个保护随即复归原状,而不会形成误动作。 四、定时限过电流保护 过电流保护通常是指其起动电流按照躲开最大负荷电流来整定的一种保护装置。它在 正常运行时不应该起动,而在电网发生故障时,则能反应于电流的增大而动作,在一般情 况下,它不仅能够保护本线路的全长,而且也能保护相邻线路的全长,以起到后备保护的 作用。 1,工作原理和整定计算的基本原则 为保证在正常运行情况下过电流保护绝不动作,显然保护装置的起动电流必须整定得 大于该线路上可能出现的最大负荷电流1:m。然而,在实际上确定保护装咒的起动电流 时,还必须考虑在外部故障切除后,保护装置是否能够返回的问题。例如在图213所示的 网络接线中,当山点短路时,短路电流将通过保护5、4、3,这些保护都要起动、但是 按照选择性的要求应由保护3动作切除故障,然后保护4和5由于电流已经减小而立即返 回原位, 20

⊙ LH 图212限时电流速断保护的单 图213选择过电淡保护起动电流和 相惊罪接线图 动作时间的博络图 实际上当外部放障切除后,流经保护4的电流是仍然在继续运行中的负荷电流还必 须考虑到,由于短路时电乐降低、变电所B母线上所接负荷的电动机被制动,因此、在散 障切除后电压恢复时,电动机要有-·个自起动的过程。电动机的自起动电流要大下它正常 工作的电流、因此、引入一个自起动系数K:g来表示自起动时最大电流1·m与常运行 时最大负荷电流I·m之比,即 I:q.max =K:alf.ma 保护4和5在这个电流的作用下必须立即返回。为此应使保护装置的返问电流1大于 1:gm。引入可靠系数:,则 (2.2) 由于保护装置的起动与返回是通过电流继电器来实现的,因此,继电器返叫电流‘起动电 流之间的关系也就代表若保护装置返回电流与起动电流之间的关系。根括《27)式引入继 电器的返回系数KA,则保护装置的起动电流即为 1. (222) 式中 K4一一可靠系数,般采用1.15一1.25: K:。一一自起动系数,数值大于1,应由网络其体接线和负荷性质确定: K一 一电流继电器的返回系数,一般采用0.5。 由这一关系可见,当越小时,则保护装置的起动电流越大,因而其灵敏性就越差, 这是不利的。这就是为什么要求过电流继电器应有较高的返回系数的原因 2按选择性的要求整定过电流保护的动作时限 如图2-14所示,假定在每个电气元件上均装有过电流保护.各保护装置的起动电流均 按照躲开被保护元件上各自的最大负荷电流来整定。这样当山点短路时,保护1~。在却 路电流的作用下都可能起动,但要满足选择性的要求,应该只有保护1动作,切除故降, 而保护?~5在故障切除之后应立即返回。这个要求只有依靠使各保护装军带有不同的时 限来满足, 保护1位于电网的最末端,只要动机内部故障,它就可以解时动作子以切除,即 21
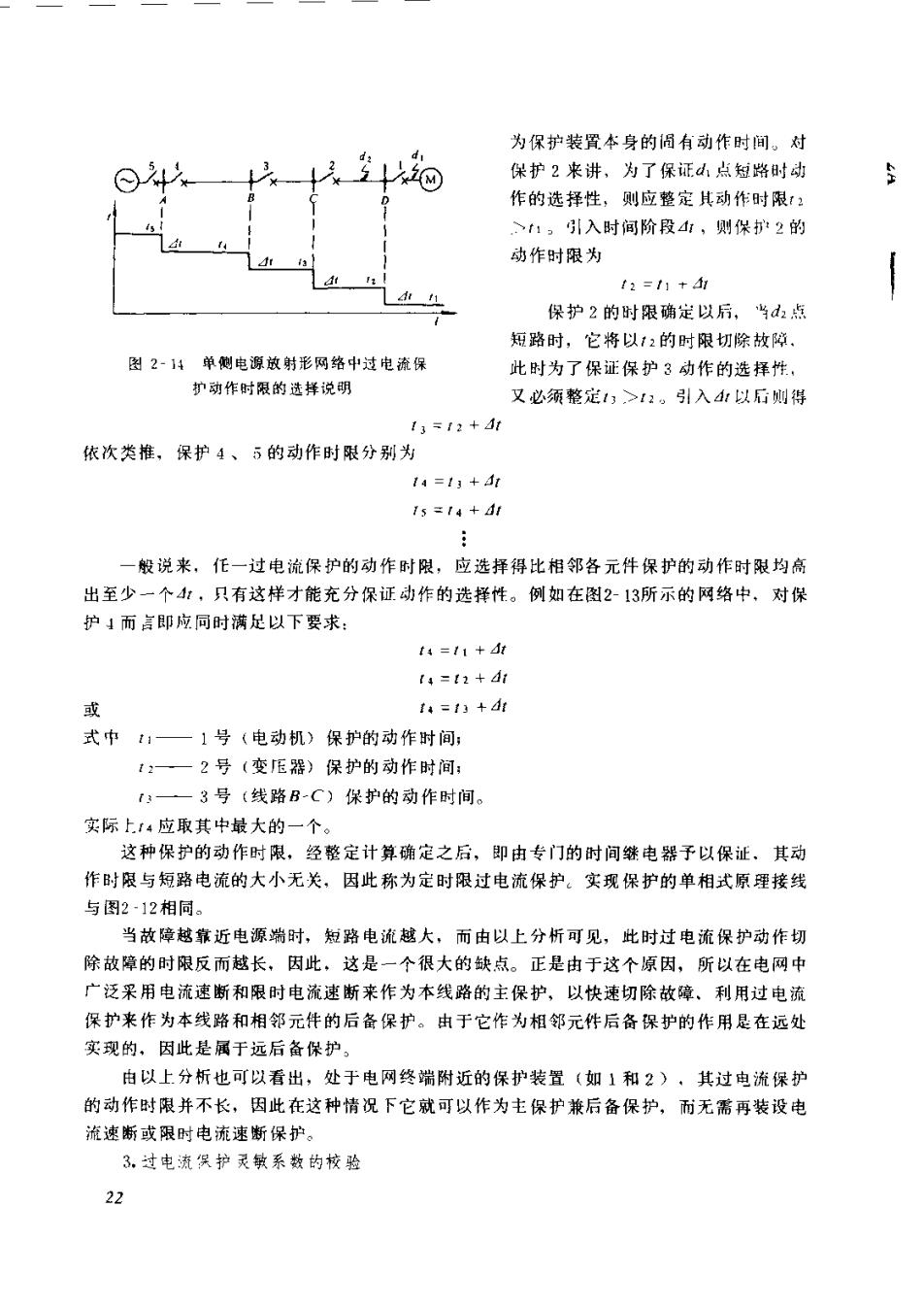
为保护装置本身的同有动作时间。对 ⊙ 保护2来讲,为了保证山点短路时动 作的选择性,则应整定其动作时限:3 >t:,引入时间阶段山,则保护2的 动作时限为 保护2的时限确定以后,当山2点 短路时,它将以1:的时限切除故降 图214单侧电源放射形网络中过电流保 此时为了保证保护3动作的选择性 护动作时限的选择说明 又必须整定1)>12。引入:以后侧得 依次类推,保护4、5的动作时限分别为 14=1+ 1s=14+dn 一般说来,作一过电流保护的动作时限,应选择得比相邻各元件保护的动作时限均高 出至少一个:,只有这样才能充分保证动作的选择性。例如在图213所示的网络中,对保 护」而言即应同时满足以下要求: 4=11+ 1=11+4t 或 14=13+i 式中1一】号电动机)保护的动作时间 t2一一2号(变压器)保护的动作时间: t- -3号(线路B-C)保护的动作时间。 实际上4应取其中最大的一个 这种保护的动作时限,经整定计算确定之后,即由专门的时间继电器子以保证、其动 作时限与短路电流的大小无关,因此称为定时限过电流保护。实现保护的单相式原理接线 与图212相同。 当故障越靠近电源端时,短路电流越大,而由以上分析可见,此时过电流保护动作切 除故障的时限反而越长,因此,这是一个很大的缺点。正是由于这个原因,所以在电网中 广泛采用电流速断和限时电流速断来作为本线路的主保护,以快速切除故障、利用过电流 保护来作为本线路和相邻元件的后备保护。由于它作为相邻元件后备保护的作用是在远处 实现的,因此是属干远后备保护 由以上分析也可以看出,处于电网终端附近的保护装置〔如1和2),其过电流保护 的动作时限并不长,因此在这种情况下它就可以作为主保护兼后备保护,而无需再装设电 流速断或限时电流速断保护。 3.过电流保护灵敏系数的校验