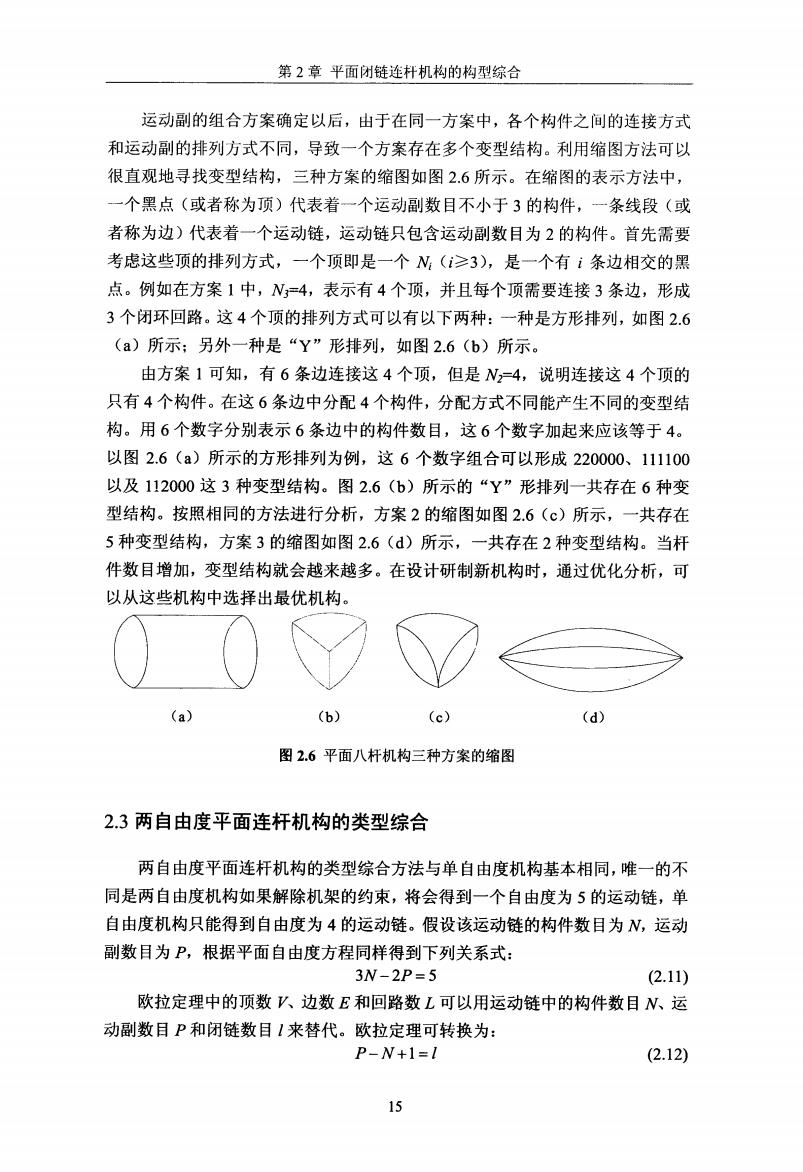
第2章平面闭链连杆机构的构型综合 运动副的组合方案确定以后,由于在同一方案中,各个构件之间的连接方式 和运动副的排列方式不同,导致一个方案存在多个变型结构。利用缩图方法可以 很直观地寻找变型结构,三种方案的缩图如图2.6所示。在缩图的表示方法中, 一个黑点(或者称为顶)代表着一个运动副数目不小于3的构件,一条线段(或 者称为边)代表着一个运动链,运动链只包含运动副数目为2的构件。首先需要 考虑这些顶的排列方式,一个顶即是一个N(i≥3),是一个有i条边相交的黑 点。例如在方案1中,N=4,表示有4个顶,并且每个顶需要连接3条边,形成 3个闭环回路。这4个顶的排列方式可以有以下两种:一种是方形排列,如图2.6 (a)所示:另外一种是“Y”形排列,如图2.6(b)所示。 由方案1可知,有6条边连接这4个顶,但是N2二4,说明连接这4个顶的 只有4个构件。在这6条边中分配4个构件,分配方式不同能产生不同的变型结 构。用6个数字分别表示6条边中的构件数目,这6个数字加起来应该等于4。 以图2.6(a)所示的方形排列为例,这6个数字组合可以形成220000、111100 以及112000这3种变型结构。图2.6(b)所示的“Y”形排列一共存在6种变 型结构。按照相同的方法进行分析,方案2的缩图如图2.6(c)所示,一共存在 5种变型结构,方案3的缩图如图2.6(d)所示,一共存在2种变型结构。当杆 件数目增加,变型结构就会越来越多。在设计研制新机构时,通过优化分析,可 以从这些机构中选择出最优机构。 (a) (b) (c) (d) 图2.6平面八杆机构三种方案的缩图 2.3两自由度平面连杆机构的类型综合 两自由度平面连杆机构的类型综合方法与单自由度机构基本相同,唯一的不 同是两自由度机构如果解除机架的约束,将会得到一个自由度为5的运动链,单 自由度机构只能得到自由度为4的运动链。假设该运动链的构件数目为N,运动 副数目为P,根据平面自由度方程同样得到下列关系式: 3N-2P=5 (2.11) 欧拉定理中的顶数V、边数E和回路数L可以用运动链中的构件数目N、运 动副数目P和闭链数目1来替代。欧拉定理可转换为: P-N+1=1 (2.12) 15
第2章平面闭链连杆机构的构型综合 运动副的组合方案确定以后,由于在同一方案中,各个构件之间的连接方式 和运动副的排列方式不同,导致一个方案存在多个变型结构。利用缩图方法可以 很直观地寻找变型结构,三种方案的缩图如图2.6所示。在缩图的表示方法中, 一个黑点(或者称为项)代表着一个运动副数目不小于3的构件,一条线段(或 者称为边)代表着一个运动链,运动链只包含运动副数目为2的构件。首先需要 考虑这些顶的排列方式,一个顶即是一个M(f≥3),是一个有i条边相交的黑 点。例如在方案1中,飓=4,表示有4个顶,并且每个顶需要连接3条边,形成 3个闭环回路。这4个项的排列方式可以有以下两种:一种是方形排列,如图2.6 (a)所示;另外一种是“Y”形排列,如图2.6(b)所示。 由方案1可知,有6条边连接这4个顶,但是尬=4,说明连接这4个顶的 只有4个构件。在这6条边中分配4个构件,分配方式不同能产生不同的变型结 构。用6个数字分别表示6条边中的构件数目,这6个数字加起来应该等于4。 以图2.6(a)所示的方形排列为例,这6个数字组合可以形成220000、111100 以及112000这3种变型结构。图2.6(b)所示的“Y”形排列一共存在6种变 型结构。按照相同的方法进行分析,方案2的缩图如图2.6(c)所示,一共存在 5种变型结构,方案3的缩图如图2.6(d)所示,一共存在2种变型结构。当杆 件数目增加,变型结构就会越来越多。在设计研制新机构时,通过优化分析,可 以从这些机构中选择出最优机构。 (a) (b) (C) (d) 图2.6平面八杆机构三种方案的缩图 2.3两自由度平面连杆机构的类型综合 两自由度平面连杆机构的类型综合方法与单自由度机构基本相同,唯一的不 同是两自由度机构如果解除机架的约束,将会得到一个自由度为5的运动链,单 自由度机构只能得到自由度为4的运动链。假设该运动链的构件数目为Ⅳ,运动 副数目为P,根据平面自由度方程同样得到下列关系式: 3N一2P=5 (2.11) 欧拉定理中的顶数从边数E和回路数三可以用运动链中的构件数目Ⅳ、运 动副数目P和闭链数目,来替代。欧拉定理可转换为: P一Ⅳ+1=, (2.12) 15
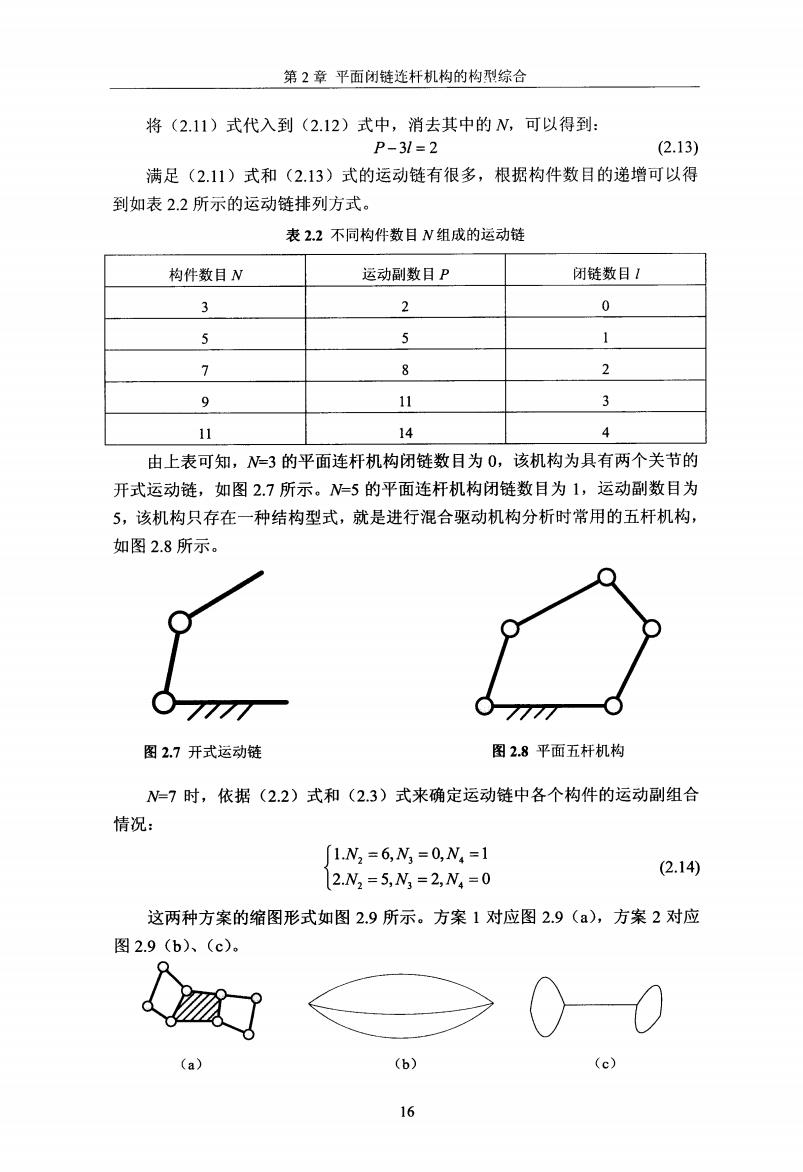
第2章平面闭链连杆机构的构型综合 将(2.11)式代入到(2.12)式中,消去其中的N,可以得到: P-3l=2 (2.13) 满足(2.11)式和(2.13)式的运动链有很多,根据构件数目的递增可以得 到如表2.2所示的运动链排列方式。 表2.2不同构件数目N组成的运动链 构件数目N 运动副数目P 闭链数目1 3 2 0 5 1 7 8 2 9 11 3 11 14 4 由上表可知,N=3的平面连杆机构闭链数目为0,该机构为具有两个关节的 开式运动链,如图2.7所示。N-5的平面连杆机构闭链数目为1,运动副数目为 5,该机构只存在一种结构型式,就是进行混合驱动机构分析时常用的五杆机构, 如图2.8所示。 7777 图2.7开式运动链 图2.8平面五杆机构 N=7时,依据(2.2)式和(2.3)式来确定运动链中各个构件的运动副组合 情况: 1N2=6,N3=0,N4=1 (2.14) 2.N2=5,N3=2,N4=0 这两种方案的缩图形式如图2.9所示。方案1对应图2.9(a),方案2对应 图2.9(b)、(c)。 (a) (b) (c) 16
第2章平面闭链连杆机构的构型综合 将(2.11)式代入到(2.12)式中,消去其中的Ⅳ,可以得到: P-31=2 (2.13) 满足(2.11)式和(2.13)式的运动链有很多,根据构件数目的递增可以得 到如表2.2所示的运动链排列方式。 表2.2不同构件数目Ⅳ组成的运动链 构件数目Ⅳ 运动副数目尸 闭链数目, 3 2 0 5 5 1 7 8 2 9 11 3 11 14 4 由上表可知,N=3的平面连杆机构闭链数目为0,该机构为具有两个关节的 开式运动链,如图2.7所示。N=5的平面连杆机构闭链数目为1,运动副数目为 5,该机构只存在一种结构型式,就是进行混合驱动机构分析时常用的五杆机构, 如图2.8所示。 图2.7开式运动链 图2.8平面五杆机构 N=7时,依据(2.2)式和(2.3)式来确定运动链中各个构件的运动副组合 情况: {21..Ⅳ2N2:=56,,Ⅳ3N3:=20,,Ⅳ4N4:=01 (2.14) 【2.Ⅳ2=5,Ⅳ3=2,Ⅳ4= ……7 这两种方案的缩图形式如图2.9所示。方案1对应图2.9(a),方案2对应 图2.9(b)、(c)。 (b) 16
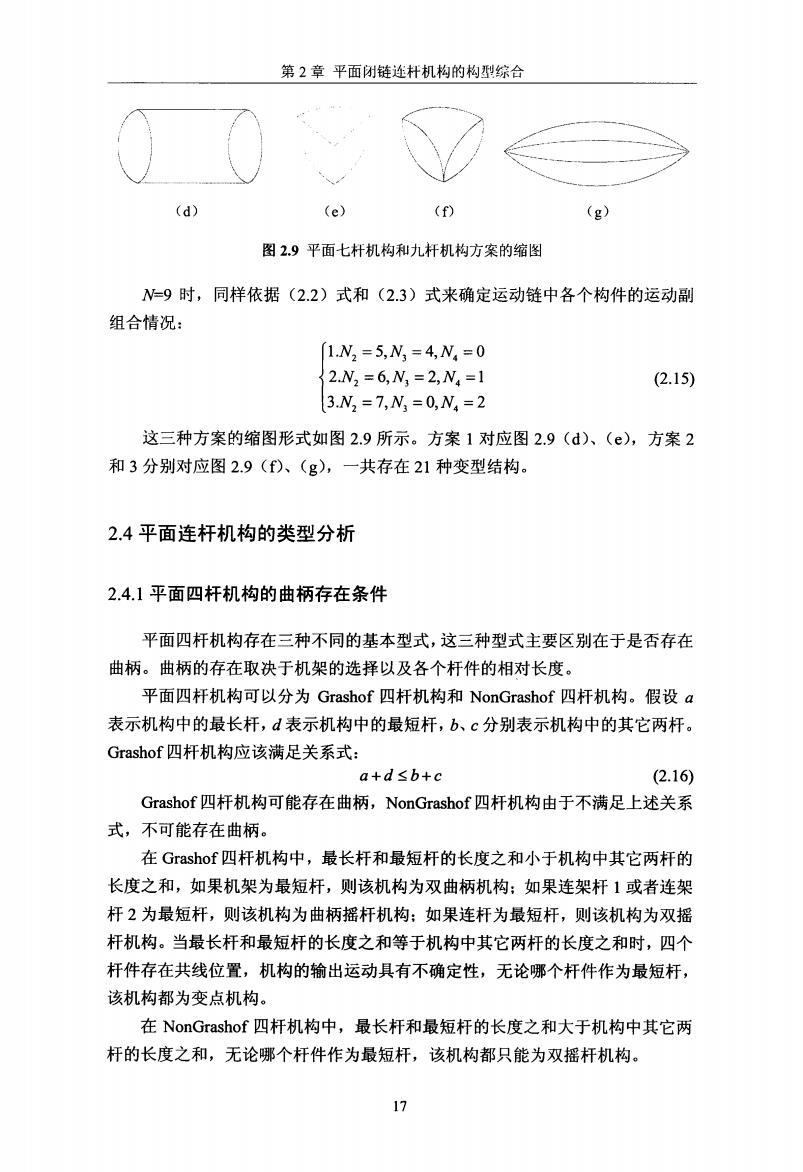
第2章平面闭链连杆机构的构型综合 (d) (e) (f) (g) 图29平面七杆机构和九杆机构方案的缩图 N=9时,同样依据(2.2)式和(2.3)式来确定运动链中各个构件的运动副 组合情况: 1.N2=5,N3=4,N4=0 2.W2=6,N3=2,N4=1 (2.15) 3.N2=7,N3=0,N4=2 这三种方案的缩图形式如图2.9所示。方案1对应图2.9(d)、(),方案2 和3分别对应图2.9(f)、(g),一共存在21种变型结构。 2.4平面连杆机构的类型分析 2.4.1平面四杆机构的曲柄存在条件 平面四杆机构存在三种不同的基本型式,这三种型式主要区别在于是否存在 曲柄。曲柄的存在取决于机架的选择以及各个杆件的相对长度。 平面四杆机构可以分为Grashof四杆机构和NonGrashof四杆机构。假设a 表示机构中的最长杆,d表示机构中的最短杆,b、c分别表示机构中的其它两杆。 Grashof四杆机构应该满足关系式: a+d≤b+c (2.16) Grashof四杆机构可能存在曲柄,NonGrashof四杆机构由于不满足上述关系 式,不可能存在曲柄。 在Grashof四杆机构中,最长杆和最短杆的长度之和小于机构中其它两杆的 长度之和,如果机架为最短杆,则该机构为双曲柄机构:如果连架杆1或者连架 杆2为最短杆,则该机构为曲柄摇杆机构:如果连杆为最短杆,则该机构为双摇 杆机构。当最长杆和最短杆的长度之和等于机构中其它两杆的长度之和时,四个 杆件存在共线位置,机构的输出运动具有不确定性,无论哪个杆件作为最短杆, 该机构都为变点机构。 在NonGrashof四杆机构中,最长杆和最短杆的长度之和大于机构中其它两 杆的长度之和,无论哪个杆件作为最短杆,该机构都只能为双摇杆机构。 17
第2章平面闭链连杆机构的构型综合 (d) ,’I,。 <~~≯ ‘\\、 /,; /一一~、、、、、 //一-一一~~~、、 j;/i/j《二二二二二≥ 、l\、,, \\沙/ \\~~…一一一/ (e) (f) (g) 图2.9平面七杆机构和九杆机构方案的缩图 N=9时,同样依据(2.2)式和(2.3)式来确定运动链中各个构件的运动副 组合情况: I 1.Ⅳ2=5,Ⅳ3=4,Ⅳ4=0 {2.Ⅳ2=6,Ⅳ3=2,Ⅳ4=1 (2.15) 13.Ⅳ2=7,Ⅳ3=o,Ⅳ4=2 这三种方案的缩图形式如图2.9所示。方案1对应图2.9(d)、(e),方案2 和3分别对应图2.9(f)、(g),一共存在21种变型结构。 2.4平面连杆机构的类型分析 2.4.1平面四杆机构的曲柄存在条件 平面四杆机构存在三种不同的基本型式,这三种型式主要区别在于是否存在 曲柄。曲柄的存在取决于机架的选择以及各个杆件的相对长度。 平面四杆机构可以分为Grashof四杆机构和NonGrashof四杆机构。假设a 表示机构中的最长杆,d表示机构中的最短杆,b、C分别表示机构中的其它两杆。 Grashof四杆机构应该满足关系式: a+d≤6+c (2.16) Grashof四杆机构可能存在曲柄,NonGrashof四杆机构由于不满足上述关系 式,不可能存在曲柄。 在Grashof四杆机构中,最长杆和最短杆的长度之和小于机构中其它两杆的 长度之和,如果机架为最短杆,则该机构为双曲柄机构;如果连架杆1或者连架 杆2为最短杆,则该机构为曲柄摇杆机构;如果连杆为最短杆,则该机构为双摇 杆机构。当最长杆和最短杆的长度之和等于机构中其它两杆的长度之和时,四个 杆件存在共线位置,机构的输出运动具有不确定性,无论哪个杆件作为最短杆, 该机构都为变点机构。 在NonGrashof四杆机构中,最长杆和最短杆的长度之和大于机构中其它两 杆的长度之和,无论哪个杆件作为最短杆,该机构都只能为双摇杆机构。 17
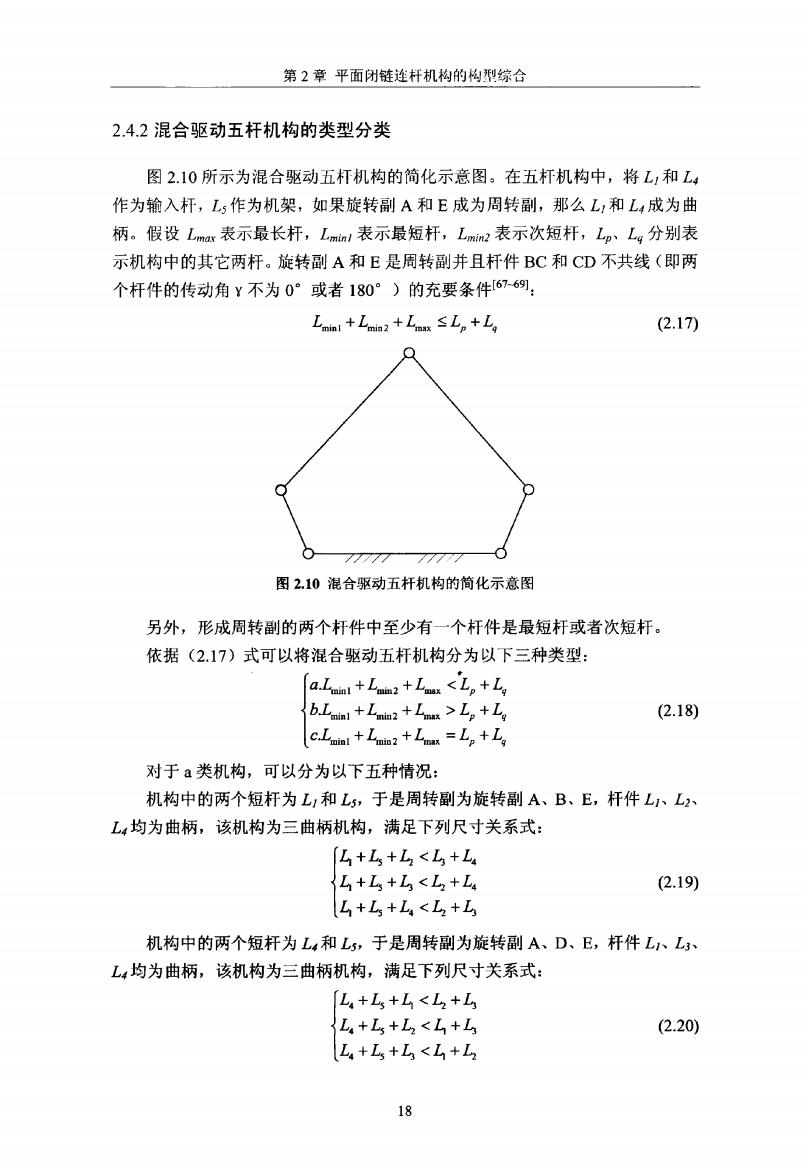
第2章平面闭链逆杆机构的构型综合 2.4.2混合驱动五杆机构的类型分类 图2.10所示为混合驱动五杆机构的简化示意图。在五杆机构中,将L,和L4 作为输入杆,L5作为机架,如果旋转副A和E成为周转副,那么L,和L4成为曲 柄。假设Lmar表示最长杆,Lmin表示最短杆,Lmim2表示次短杆,Lp、Lg分别表 示机构中的其它两杆。旋转副A和E是周转副并且杆件BC和CD不共线(即两 个杆件的传动角¥不为0°或者180°)的充要条件6769: Lminl Lmin2+Lms S Lp+Lo (2.17 7777 图2,10混合驱动五杆机构的简化示意图 另外,形成周转副的两个杆件中至少有一个杆件是最短杆或者次短杆。 依据(2.17)式可以将混合驱动五杆机构分为以下三种类型: a.Lul+La2+Lau<Zp+L, B.Lnin +Lmin2+L (2.18) C.Lmin!+Lmin2+Lm=p+ 对于a类机构,可以分为以下五种情况: 机构中的两个短杆为L,和L5,于是周转副为旋转副A、B、E,杆件L、L2、 L4均为曲柄,该机构为三曲柄机构,满足下列尺寸关系式: L+L+L<L+L L+L+L<L+L (2.19) L+Ls+L<L+L 机构中的两个短杆为L4和L5,于是周转副为旋转副A、D、E,杆件L、L3、 L4均为曲柄,该机构为三曲柄机构,满足下列尺寸关系式: L+L+L<L+L L+Ls+L<+L (2.20) L+Ls+L<L+L 18
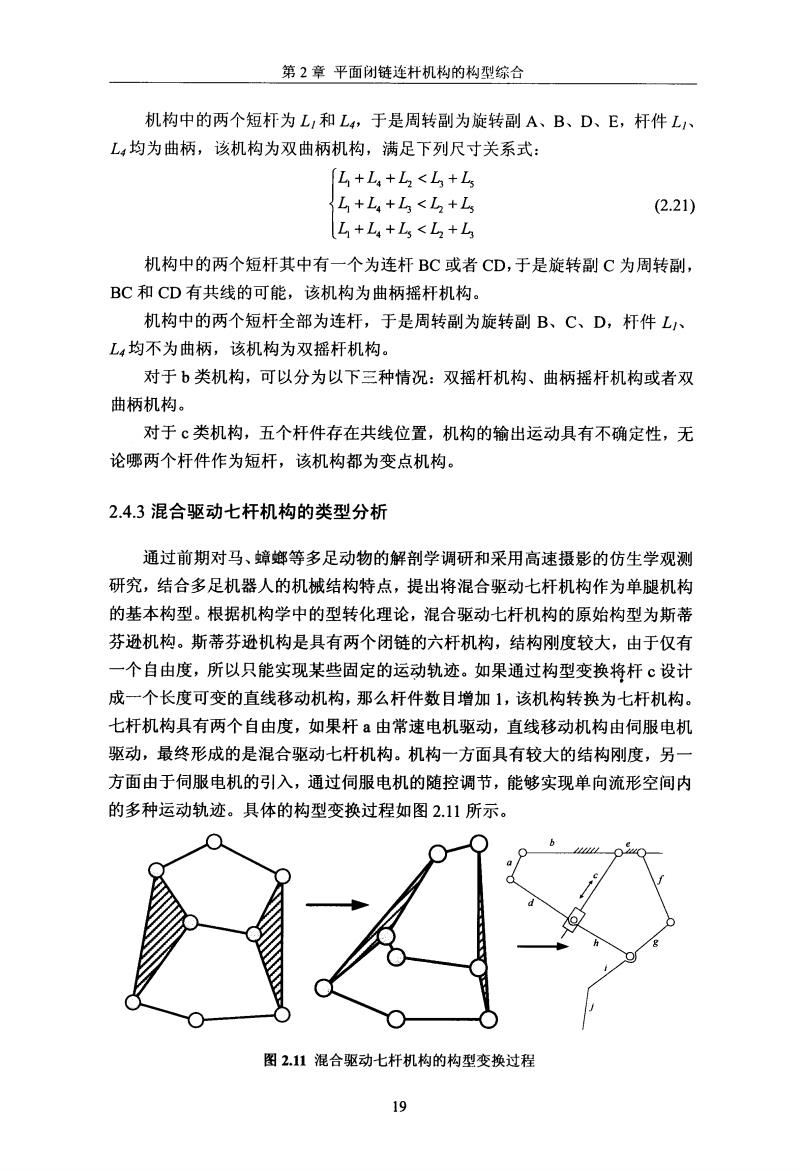
第2章平面闭链连杆机构的构型综合 机构中的两个短杆为L,和L4,于是周转副为旋转副A、B、D、E,杆件L、 L均为曲柄,该机构为双曲柄机构,满足下列尺寸关系式: 「亿+L,+L2<L+L L+L+L<L+L (2.21) L+L+L<L+L 机构中的两个短杆其中有一个为连杆BC或者CD,于是旋转副C为周转副, BC和CD有共线的可能,该机构为曲柄摇杆机构。 机构中的两个短杆全部为连杆,于是周转副为旋转副B、C、D,杆件L、 L4均不为曲柄,该机构为双摇杆机构。 对于b类机构,可以分为以下三种情况:双摇杆机构、曲柄摇杆机构或者双 曲柄机构。 对于℃类机构,五个杆件存在共线位置,机构的输出运动具有不确定性,无 论哪两个杆件作为短杆,该机构都为变点机构。 2.4.3混合驱动七杆机构的类型分析 通过前期对马、蟑螂等多足动物的解剖学调研和采用高速摄影的仿生学观测 研究,结合多足机器人的机械结构特点,提出将混合驱动七杆机构作为单腿机构 的基本构型。根据机构学中的型转化理论,混合驱动七杆机构的原始构型为斯蒂 芬逊机构。斯蒂芬逊机构是具有两个闭链的六杆机构,结构刚度较大,由于仅有 一个自由度,所以只能实现某些固定的运动轨迹。如果通过构型变换将杆℃设计 成一个长度可变的直线移动机构,那么杆件数目增加1,该机构转换为七杆机构。 七杆机构具有两个自由度,如果杆a由常速电机驱动,直线移动机构由伺服电机 驱动,最终形成的是混合驱动七杆机构。机构一方面具有较大的结构刚度,另一 方面由于伺服电机的引入,通过伺服电机的随控调节,能够实现单向流形空间内 的多种运动轨迹。具体的构型变换过程如图2.11所示。 图2.11混合驱动七杆机构的构型变换过程 19
第2章平面闭链连杆机构的构型综合 机构中的两个短杆为三,和厶,于是周转副为旋转副A、B、D、E,杆件£,、 厶均为曲柄,该机构为双曲柄机构,满足下列尺寸关系式: f厶+厶+厶<L3+厶 {厶+厶+厶<厶+厶 (2.21) 【厶+厶+厶<厶+厶 机构中的两个短杆其中有一个为连杆BC或者CD,于是旋转副C为周转副, BC和CD有共线的可能,该机构为曲柄摇杆机构。 机构中的两个短杆全部为连杆,于是周转副为旋转副B、C、D,杆件三,、 厶均不为曲柄,该机构为双摇杆机构。 对于b类机构,可以分为以下三种情况:双摇杆机构、曲柄摇杆机构或者双 曲柄机构。 对于C类机构,五个杆件存在共线位置,机构的输出运动具有不确定性,无 论哪两个杆件作为短杆,该机构都为变点机构。 2.4.3混合驱动七杆机构的类型分析 通过前期对马、蟑螂等多足动物的解剖学调研和采用高速摄影的仿生学观测 研究,结合多足机器人的机械结构特点,提出将混合驱动七杆机构作为单腿机构 的基本构型。根据机构学中的型转化理论,混合驱动七杆机构的原始构型为斯蒂 芬逊机构。斯蒂芬逊机构是具有两个闭链的六杆机构,结构刚度较大,由于仅有 一个自由度,所以只能实现某些固定的运动轨迹。如果通过构型变换将杆C设计 成一个长度可变的直线移动机构,那么杆件数目增加1,该机构转换为七杆机构。 七杆机构具有两个自由度,如果杆a由常速电机驱动,直线移动机构由伺服电机 驱动,最终形成的是混合驱动七杆机构。机构一方面具有较大的结构刚度,另一 方面由于伺服电机的引入,通过伺服电机的随控调节,能够实现单向流形空间内 的多种运动轨迹。具体的构型变换过程如图2.11所示。 图2.11混合驱动七杆机构的构型变换过程 19