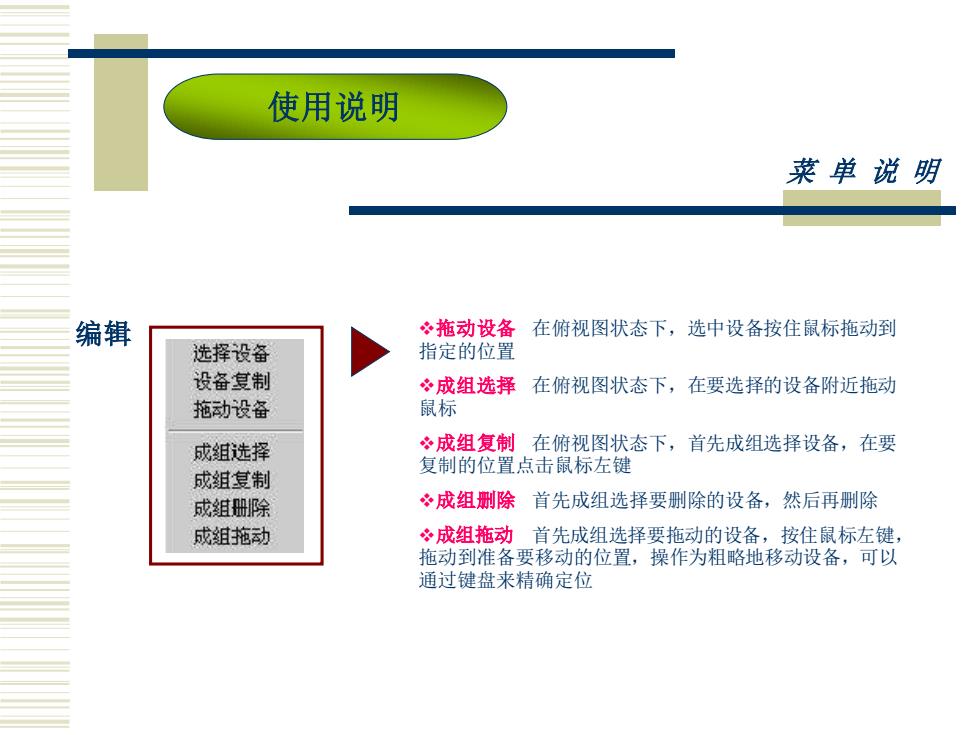
❖拖动设备 在俯视图状态下,选中设备按住鼠标拖动到 指定的位置 ❖成组选择 在俯视图状态下,在要选择的设备附近拖动 鼠标 ❖成组复制 在俯视图状态下,首先成组选择设备,在要 复制的位置点击鼠标左键 ❖成组删除 首先成组选择要删除的设备,然后再删除 ❖成组拖动 首先成组选择要拖动的设备,按住鼠标左键, 拖动到准备要移动的位置,操作为粗略地移动设备,可以 通过键盘来精确定位 使用说明 菜 单 说 明 编辑
❖拖动设备 在俯视图状态下,选中设备按住鼠标拖动到 指定的位置 ❖成组选择 在俯视图状态下,在要选择的设备附近拖动 鼠标 ❖成组复制 在俯视图状态下,首先成组选择设备,在要 复制的位置点击鼠标左键 ❖成组删除 首先成组选择要删除的设备,然后再删除 ❖成组拖动 首先成组选择要拖动的设备,按住鼠标左键, 拖动到准备要移动的位置,操作为粗略地移动设备,可以 通过键盘来精确定位 使用说明 菜 单 说 明 编辑
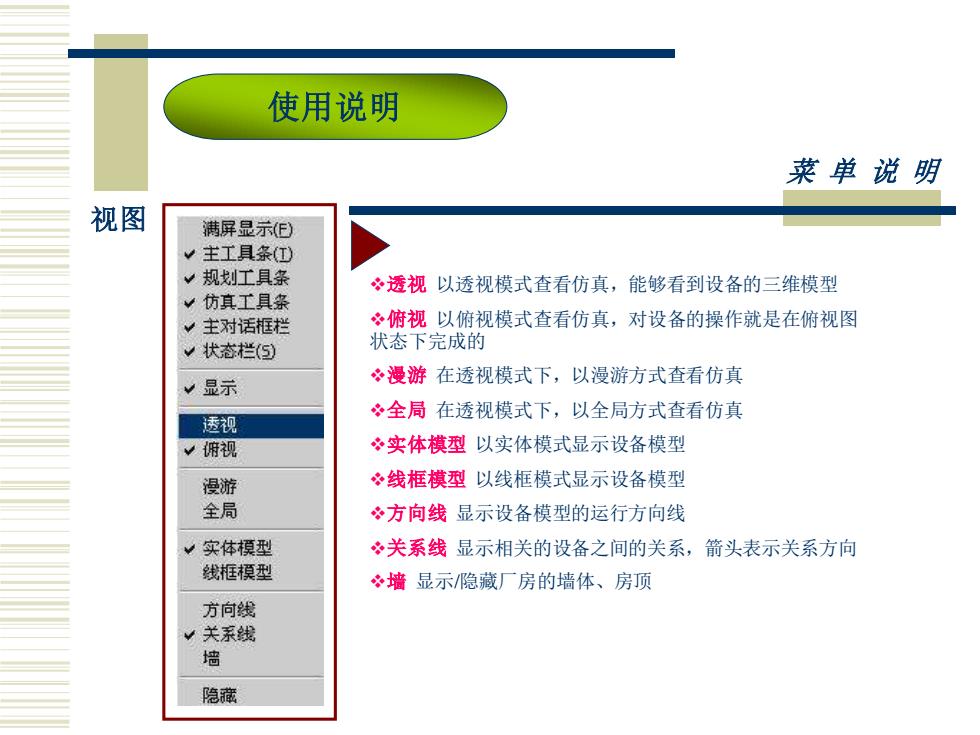
使用说明 菜 单 说 明 ❖透视 以透视模式查看仿真,能够看到设备的三维模型 ❖俯视 以俯视模式查看仿真,对设备的操作就是在俯视图 状态下完成的 ❖漫游 在透视模式下,以漫游方式查看仿真 ❖全局 在透视模式下,以全局方式查看仿真 ❖实体模型 以实体模式显示设备模型 ❖线框模型 以线框模式显示设备模型 ❖方向线 显示设备模型的运行方向线 ❖关系线 显示相关的设备之间的关系,箭头表示关系方向 ❖墙 显示/隐藏厂房的墙体、房顶 视图
使用说明 菜 单 说 明 ❖透视 以透视模式查看仿真,能够看到设备的三维模型 ❖俯视 以俯视模式查看仿真,对设备的操作就是在俯视图 状态下完成的 ❖漫游 在透视模式下,以漫游方式查看仿真 ❖全局 在透视模式下,以全局方式查看仿真 ❖实体模型 以实体模式显示设备模型 ❖线框模型 以线框模式显示设备模型 ❖方向线 显示设备模型的运行方向线 ❖关系线 显示相关的设备之间的关系,箭头表示关系方向 ❖墙 显示/隐藏厂房的墙体、房顶 视图
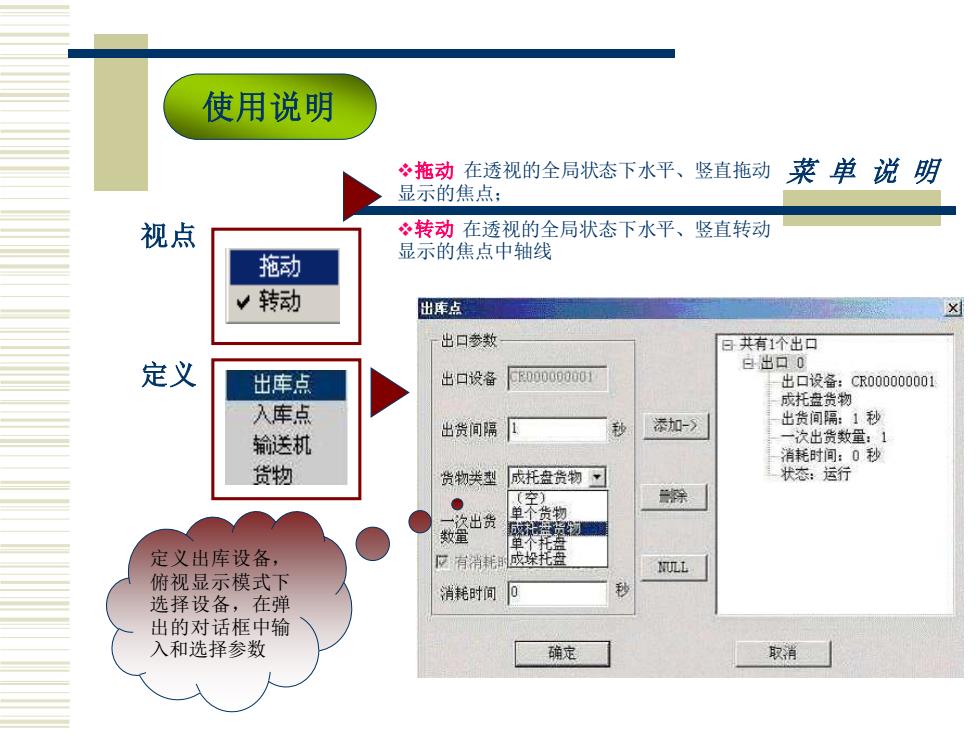
❖拖动 在透视的全局状态下水平、竖直拖动 显示的焦点; ❖转动 在透视的全局状态下水平、竖直转动 显示的焦点中轴线 定义出库设备, 俯视显示模式下 选择设备,在弹 出的对话框中输 入和选择参数 使用说明 菜 单 说 明 视点 定义
❖拖动 在透视的全局状态下水平、竖直拖动 显示的焦点; ❖转动 在透视的全局状态下水平、竖直转动 显示的焦点中轴线 定义出库设备, 俯视显示模式下 选择设备,在弹 出的对话框中输 入和选择参数 使用说明 菜 单 说 明 视点 定义
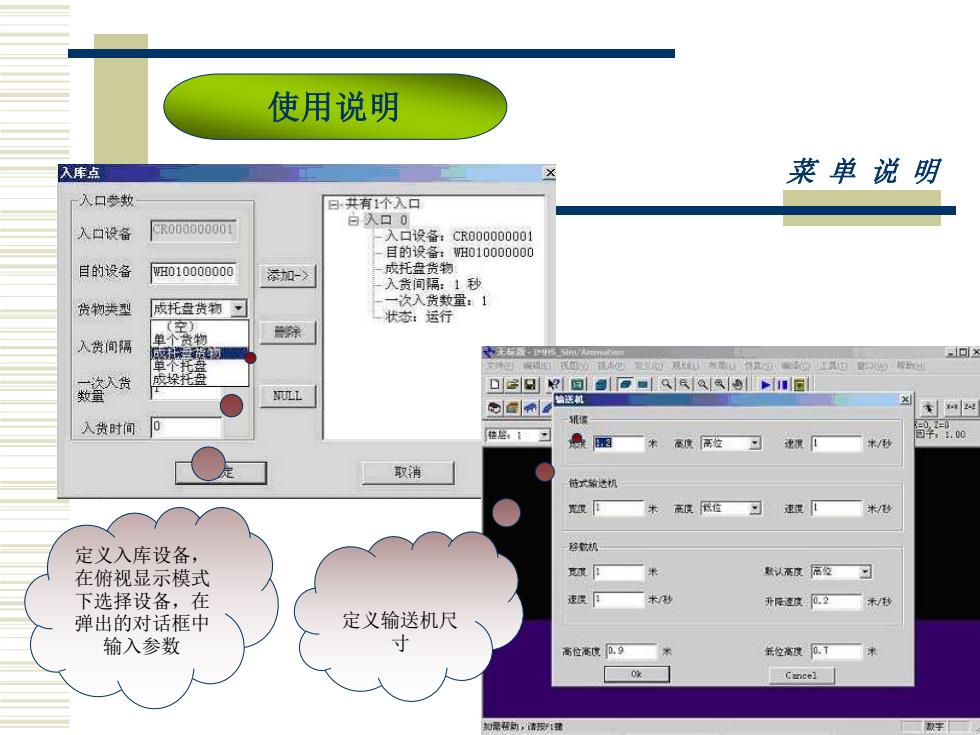
定义入库设备, 在俯视显示模式 下选择设备,在 弹出的对话框中 输入参数 定义输送机尺 寸 使用说明 菜 单 说 明
定义入库设备, 在俯视显示模式 下选择设备,在 弹出的对话框中 输入参数 定义输送机尺 寸 使用说明 菜 单 说 明
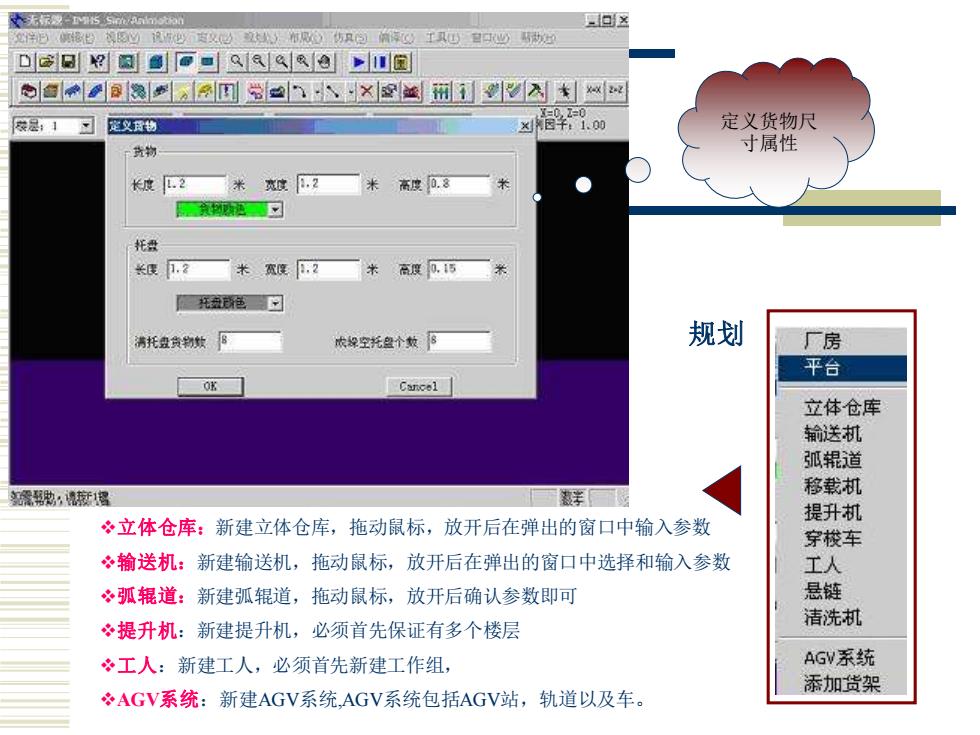
定义货物尺 寸属性 ❖立体仓库:新建立体仓库,拖动鼠标,放开后在弹出的窗口中输入参数 ❖输送机:新建输送机,拖动鼠标,放开后在弹出的窗口中选择和输入参数 ❖弧辊道:新建弧辊道,拖动鼠标,放开后确认参数即可 ❖提升机:新建提升机,必须首先保证有多个楼层 ❖工人:新建工人,必须首先新建工作组, ❖AGV系统:新建AGV系统,AGV系统包括AGV站,轨道以及车。 规划
定义货物尺 寸属性 ❖立体仓库:新建立体仓库,拖动鼠标,放开后在弹出的窗口中输入参数 ❖输送机:新建输送机,拖动鼠标,放开后在弹出的窗口中选择和输入参数 ❖弧辊道:新建弧辊道,拖动鼠标,放开后确认参数即可 ❖提升机:新建提升机,必须首先保证有多个楼层 ❖工人:新建工人,必须首先新建工作组, ❖AGV系统:新建AGV系统,AGV系统包括AGV站,轨道以及车。 规划