哈尔滨工业大学工学硕士学位论文 第2章仿青蛙跳跃机器人设计 2.1引言 青蛙的生物结构是在自然界中经过长期进化形成的刚性与柔性完美结合的 有机体,本章通过对青蛙跳跃的运动特征以及跳跃过程中腿部肌肉的伸缩情况 进行分析,得出影响肌肉作用效果的因素;为了能够有效模仿生物肌肉的特性, 采用Mckibben型气动肌肉作为驱动,设计并研制了一种以气动肌肉为驱动的 仿青蛙弹跳机构。 2.2青蛙生物特征 2.2.1青蛙运动特征 总结之前的研究和查阅相关资料可知,青蛙的质量分布主要集中在躯干, 四肢占的比重很小:青蛙大腿和小腿的长度基本相等,大臂和小臂的长度基本 相等,脚掌长而有一定柔性,指间有璞,这样的脚有利于跳跃和游泳;四肢中, 两条后腿运动规律相似,是完成跳跃运动的主要部位。在起跳前,青蛙以一种 坐姿将后腿完全弯曲于身体下方,从而支撑身体的大部分重量,前肢只承担小 部分自身重量。起跳时,肌肉通过收缩驱动后腿和身体的伸展,从而反作用于 地面,产生起跳的推进力,跳向空中。在空中阶段,青蛙的前肢开始伸展,同 时后腿在起跳后开始收腿,以做好着陆的姿态准备。在着地时,一般前肢先与 地面接触,支撑身体并减速,直到后腿接触地面,并且此时的运动可以看作身 体相对于前肢肩关节的转动和缓冲运动。最终,后腿着地后,开始支撑大部分 重量,完成一次跳跃运动,进入地面调整阶段,准备下一周期的跳跃。 2.2.2青蛙腿部伸肌分析 青蛙腿部肌肉收缩后驱动腿和身体的伸展,从而产生推进力实现在不同地 形环境中的运动。跳跃过程腿部伸肌起主要作用,腿部肌肉在一次跳跃过程中 充分收缩,由于青蛙跳跃属于间歇型跳跃,减小了往复周期运动带来的肌肉疲 劳等因素影响,因此青蛙肌肉的收缩特性在每次跳跃过程中基本相同。后腿包 含的主要肌肉为:半膜肌,髋关节的伸肌:跖肌,踝关节的伸肌:臂肌和股二 头肌,膝关节的伸肌。跳跃时,这四种肌肉的开始收缩时刻基本相同,但是关 节的伸展却有细微的延迟,这种现象与生物肌骨骼系统中的柔性组织有关,例 -8-
哈尔滨工业大学工学硕士学位论文 - 8 - 第2章 仿青蛙跳跃机器人设计 2.1 引言 青蛙的生物结构是在自然界中经过长期进化形成的刚性与柔性完美结合的 有机体,本章通过对青蛙跳跃的运动特征以及跳跃过程中腿部肌肉的伸缩情况 进行分析,得出影响肌肉作用效果的因素;为了能够有效模仿生物肌肉的特性, 采用 Mckibben 型气动肌肉作为驱动,设计并研制了一种以气动肌肉为驱动的 仿青蛙弹跳机构。 2.2 青蛙生物特征 2.2.1 青蛙运动特征 总结之前的研究和查阅相关资料可知,青蛙的质量分布主要集中在躯干, 四肢占的比重很小;青蛙大腿和小腿的长度基本相等,大臂和小臂的长度基本 相等,脚掌长而有一定柔性,指间有蹼,这样的脚有利于跳跃和游泳;四肢中, 两条后腿运动规律相似,是完成跳跃运动的主要部位。在起跳前,青蛙以一种 坐姿将后腿完全弯曲于身体下方,从而支撑身体的大部分重量,前肢只承担小 部分自身重量。起跳时,肌肉通过收缩驱动后腿和身体的伸展,从而反作用于 地面,产生起跳的推进力,跳向空中。在空中阶段,青蛙的前肢开始伸展,同 时后腿在起跳后开始收腿,以做好着陆的姿态准备。在着地时,一般前肢先与 地面接触,支撑身体并减速,直到后腿接触地面,并且此时的运动可以看作身 体相对于前肢肩关节的转动和缓冲运动。最终,后腿着地后,开始支撑大部分 重量,完成一次跳跃运动,进入地面调整阶段,准备下一周期的跳跃[26]。 2.2.2 青蛙腿部伸肌分析 青蛙腿部肌肉收缩后驱动腿和身体的伸展,从而产生推进力实现在不同地 形环境中的运动。跳跃过程腿部伸肌起主要作用,腿部肌肉在一次跳跃过程中 充分收缩,由于青蛙跳跃属于间歇型跳跃,减小了往复周期运动带来的肌肉疲 劳等因素影响,因此青蛙肌肉的收缩特性在每次跳跃过程中基本相同。后腿包 含的主要肌肉为:半膜肌,髋关节的伸肌;跖肌,踝关节的伸肌;臂肌和股二 头肌,膝关节的伸肌。跳跃时,这四种肌肉的开始收缩时刻基本相同,但是关 节的伸展却有细微的延迟,这种现象与生物肌骨骼系统中的柔性组织有关,例
哈尔滨工业大学工学硕士学位论文 如肌腱和韧带等。髋关节的运动比膝关节和踝关节略微提前或者说髋关节的初 始伸展速度更大。髋关节和膝关节的伸肌在地面结束时刻,即双脚跳离地面时 完成收缩运动,而驱动踝关节伸展的跖肌则通常在起跳后才完成其收缩过程2] 文献27,28]对青蛙在跳跃和游泳时的肌肉运动情况进行了实验,并得出青 蛙弹跳后腿中肌肉的一些特性。首先,在拮抗肌或者外力的作用下,肌肉会产 生拉伸运动。肌肉在被动拉伸时,肌肉纤维会吸收或转化部分机械能(拉伸未 超过其刚度范围),将这种能量储存在像肌腱和韧带这样的弹性结构中。其次, 肌肉工作在长度几乎不改变的等长收缩状态时,肌肉只产生很大的拉力,却不 产生有用功或驱动。这种情况下,肌肉一般对关节稳定性或者将弹性应变能储 存到肌腱等柔性组织中非常有利。此外,在青蛙跳跃过程中还普遍存在一种肌 肉预张紧现象,在肌肉通过收缩驱动后腿伸展前,其首先被外力或者其他肢体 带动,拉伸一段位移,其作用属于被动拉伸,这种现象一般有利于肌肉在跳跃 过程中实现更大的输出。 半膜肌是一种双关节肌肉,横跨髋关节和膝关节,主要作用在髋关节上。 跳跃时,该肌肉总是在跳跃开始时刻前很小一段时间内率先运动,收缩率为0.25。 臀肌和股二头肌也是一个双关节肌肉,不同于半膜肌,它们主要作用在膝关节 上,并且臀肌是腿部这些肌肉中最小的,而股二头肌有复杂的羽状结构,是这 几种肌肉中最大的肌肉。臀肌活动开始于起跳开始时刻前,股二头肌收缩相对 滞后一些,收缩率分别为0.2和0.28,收缩速度不恒定,前半段比后半段慢。 半膜肌和股二头肌收缩速度最大,臀肌收缩速度相对较小,这可能与肌肉组织 特性和安装位置有关。腓肠肌是一种双关节羽状肌肉,横跨膝关节和踝关节连 入脚底肌腱。主要作用是伸展踝关节。跳跃过程中,腓肠肌活动于跳跃开始时 刻前很短时间内,并持续很长时间,收缩率为0.18,而收缩速度是这些肌肉中 最慢的,在前半阶段的速度明显慢于后半阶段。腿部肌肉一般情况下会出现预 张紧情况。该现象出现于跳跃开始时刻前后,持续很短一段时间,然后肌肉才 开始收缩。因此出现该现象时肌肉收缩就会有相应的延迟。每种肌肉出现该现 象的程度不一,腓肠肌预张紧持续大约起跳过程的一半时间,而臀肌和股二头 肌的预张紧现象却没有对收缩率和收缩速度造成太大影响29。 综上所述,肌肉组织结构、大小和位置是不同的,因此其收缩率和收缩速 度并不是统一和恒定的,肌肉的初始作用时刻与作用持续时间也不一致。肌肉 收缩过程中普遍存在一种预张紧现象,这种情况下,与肌肉相连的弹性结构能 够储存能量,在起跳时迅速释放会,有助于提高驱动能力,例如在腓肠肌的肌 腱储存能量,并在起跳阶段最后时刻快速释放能量,考虑到肌肉的收缩特性曲 线与肌肉的激励程度和收缩率有关,这种现象的作用是使肌肉工作在一种合适
哈尔滨工业大学工学硕士学位论文 - 9 - 如肌腱和韧带等。髋关节的运动比膝关节和踝关节略微提前或者说髋关节的初 始伸展速度更大。髋关节和膝关节的伸肌在地面结束时刻,即双脚跳离地面时 完成收缩运动,而驱动踝关节伸展的跖肌则通常在起跳后才完成其收缩过程[27]。 文献[27,28]对青蛙在跳跃和游泳时的肌肉运动情况进行了实验,并得出青 蛙弹跳后腿中肌肉的一些特性。首先,在拮抗肌或者外力的作用下,肌肉会产 生拉伸运动。肌肉在被动拉伸时,肌肉纤维会吸收或转化部分机械能(拉伸未 超过其刚度范围),将这种能量储存在像肌腱和韧带这样的弹性结构中。其次, 肌肉工作在长度几乎不改变的等长收缩状态时,肌肉只产生很大的拉力,却不 产生有用功或驱动。这种情况下,肌肉一般对关节稳定性或者将弹性应变能储 存到肌腱等柔性组织中非常有利。此外,在青蛙跳跃过程中还普遍存在一种肌 肉预张紧现象,在肌肉通过收缩驱动后腿伸展前,其首先被外力或者其他肢体 带动,拉伸一段位移,其作用属于被动拉伸,这种现象一般有利于肌肉在跳跃 过程中实现更大的输出。 半膜肌是一种双关节肌肉,横跨髋关节和膝关节,主要作用在髋关节上。 跳跃时,该肌肉总是在跳跃开始时刻前很小一段时间内率先运动,收缩率为 0.25。 臀肌和股二头肌也是一个双关节肌肉,不同于半膜肌,它们主要作用在膝关节 上,并且臀肌是腿部这些肌肉中最小的,而股二头肌有复杂的羽状结构,是这 几种肌肉中最大的肌肉。臀肌活动开始于起跳开始时刻前,股二头肌收缩相对 滞后一些,收缩率分别为 0.2 和 0.28,收缩速度不恒定,前半段比后半段慢。 半膜肌和股二头肌收缩速度最大,臀肌收缩速度相对较小,这可能与肌肉组织 特性和安装位置有关。腓肠肌是一种双关节羽状肌肉,横跨膝关节和踝关节连 入脚底肌腱。主要作用是伸展踝关节。跳跃过程中,腓肠肌活动于跳跃开始时 刻前很短时间内,并持续很长时间,收缩率为 0.18,而收缩速度是这些肌肉中 最慢的,在前半阶段的速度明显慢于后半阶段。腿部肌肉一般情况下会出现预 张紧情况。该现象出现于跳跃开始时刻前后,持续很短一段时间,然后肌肉才 开始收缩。因此出现该现象时肌肉收缩就会有相应的延迟。每种肌肉出现该现 象的程度不一,腓肠肌预张紧持续大约起跳过程的一半时间,而臀肌和股二头 肌的预张紧现象却没有对收缩率和收缩速度造成太大影响[29]。 综上所述,肌肉组织结构、大小和位置是不同的,因此其收缩率和收缩速 度并不是统一和恒定的,肌肉的初始作用时刻与作用持续时间也不一致。肌肉 收缩过程中普遍存在一种预张紧现象,这种情况下,与肌肉相连的弹性结构能 够储存能量,在起跳时迅速释放会,有助于提高驱动能力,例如在腓肠肌的肌 腱储存能量,并在起跳阶段最后时刻快速释放能量,考虑到肌肉的收缩特性曲 线与肌肉的激励程度和收缩率有关,这种现象的作用是使肌肉工作在一种合适
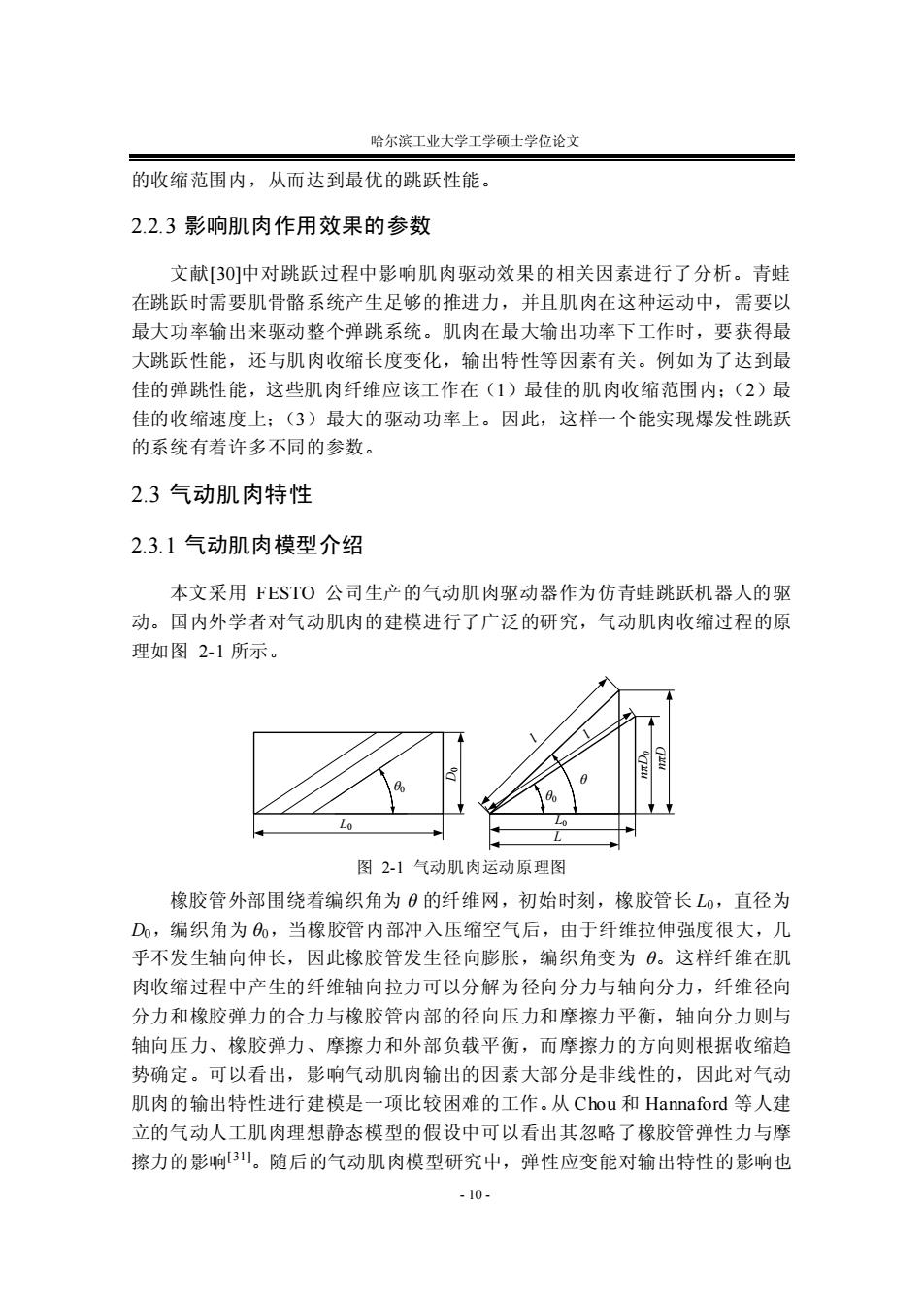
哈尔滨工业大学工学硕士学位论文 的收缩范围内,从而达到最优的跳跃性能。 2.2.3影响肌肉作用效果的参数 文献[30]中对跳跃过程中影响肌肉驱动效果的相关因素进行了分析。青蛙 在跳跃时需要肌骨骼系统产生足够的推进力,并且肌肉在这种运动中,需要以 最大功率输出来驱动整个弹跳系统。肌肉在最大输出功率下工作时,要获得最 大跳跃性能,还与肌肉收缩长度变化,输出特性等因素有关。例如为了达到最 佳的弹跳性能,这些肌肉纤维应该工作在(1)最佳的肌肉收缩范围内:(2)最 佳的收缩速度上:(3)最大的驱动功率上。因此,这样一个能实现爆发性跳跃 的系统有着许多不同的参数。 2.3气动肌肉特性 2.3.1气动肌肉模型介绍 本文采用FESTO公司生产的气动肌肉驱动器作为仿青蛙跳跃机器人的驱 动。国内外学者对气动肌肉的建模进行了广泛的研究,气动肌肉收缩过程的原 理如图2-1所示。 % Lo 图2-1气动肌肉运动原理图 橡胶管外部围绕着编织角为0的纤维网,初始时刻,橡胶管长L0,直径为 D,编织角为,当橡胶管内部冲入压缩空气后,由于纤维拉伸强度很大,几 乎不发生轴向伸长,因此橡胶管发生径向膨胀,编织角变为0。这样纤维在肌 肉收缩过程中产生的纤维轴向拉力可以分解为径向分力与轴向分力,纤维径向 分力和橡胶弹力的合力与橡胶管内部的径向压力和摩擦力平衡,轴向分力则与 轴向压力、橡胶弹力、摩擦力和外部负载平衡,而摩擦力的方向则根据收缩趋 势确定。可以看出,影响气动肌肉输出的因素大部分是非线性的,因此对气动 肌肉的输出特性进行建模是一项比较困难的工作。从Chou和Hannaford等人建 立的气动人工肌肉理想静态模型的假设中可以看出其忽略了橡胶管弹性力与摩 擦力的影响3。随后的气动肌肉模型研究中,弹性应变能对输出特性的影响也 -10-
哈尔滨工业大学工学硕士学位论文 - 10 - 的收缩范围内,从而达到最优的跳跃性能。 2.2.3 影响肌肉作用效果的参数 文献[30]中对跳跃过程中影响肌肉驱动效果的相关因素进行了分析。青蛙 在跳跃时需要肌骨骼系统产生足够的推进力,并且肌肉在这种运动中,需要以 最大功率输出来驱动整个弹跳系统。肌肉在最大输出功率下工作时,要获得最 大跳跃性能,还与肌肉收缩长度变化,输出特性等因素有关。例如为了达到最 佳的弹跳性能,这些肌肉纤维应该工作在(1)最佳的肌肉收缩范围内;(2)最 佳的收缩速度上;(3)最大的驱动功率上。因此,这样一个能实现爆发性跳跃 的系统有着许多不同的参数。 2.3 气动肌肉特性 2.3.1 气动肌肉模型介绍 本文采用 FESTO 公司生产的气动肌肉驱动器作为仿青蛙跳跃机器人的驱 动。国内外学者对气动肌肉的建模进行了广泛的研究,气动肌肉收缩过程的原 理如图 2-1 所示。 θ0 L0 D0 θ0 θ L0 L l l nπD0 nπD 图 2-1 气动肌肉运动原理图 橡胶管外部围绕着编织角为 θ 的纤维网,初始时刻,橡胶管长 L0,直径为 D0,编织角为 θ0,当橡胶管内部冲入压缩空气后,由于纤维拉伸强度很大,几 乎不发生轴向伸长,因此橡胶管发生径向膨胀,编织角变为 θ。这样纤维在肌 肉收缩过程中产生的纤维轴向拉力可以分解为径向分力与轴向分力,纤维径向 分力和橡胶弹力的合力与橡胶管内部的径向压力和摩擦力平衡,轴向分力则与 轴向压力、橡胶弹力、摩擦力和外部负载平衡,而摩擦力的方向则根据收缩趋 势确定。可以看出,影响气动肌肉输出的因素大部分是非线性的,因此对气动 肌肉的输出特性进行建模是一项比较困难的工作。从 Chou 和 Hannaford 等人建 立的气动人工肌肉理想静态模型的假设中可以看出其忽略了橡胶管弹性力与摩 擦力的影响[31]。随后的气动肌肉模型研究中,弹性应变能对输出特性的影响也
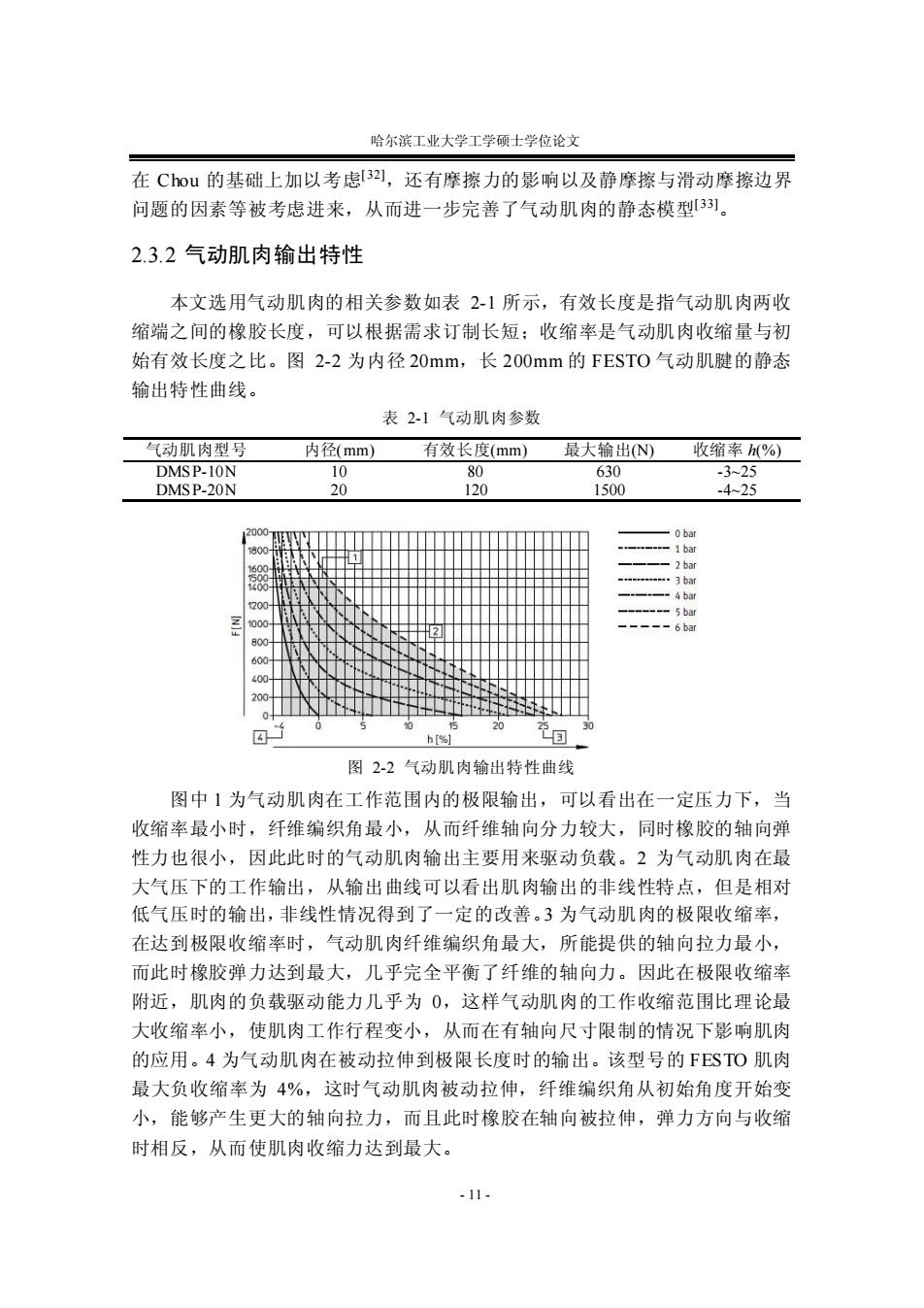
哈尔滨工业大学工学硕士学位论文 在Cou的基础上加以考虑32],还有摩擦力的影响以及静摩擦与滑动摩擦边界 问题的因素等被考虑进来,从而进一步完善了气动肌肉的静态模型33]。 2.3.2气动肌肉输出特性 本文选用气动肌肉的相关参数如表21所示,有效长度是指气动肌肉两收 缩端之间的橡胶长度,可以根据需求订制长短;收缩率是气动肌肉收缩量与初 始有效长度之比。图2-2为内径20mm,长200mm的FEST0气动肌腱的静态 输出特性曲线。 表2-1气动肌肉参数 气动肌肉型号 内径(mm) 有效长度(mm) 最大输出N) 收缩率h%) DMSP-10N 1 80 630 -325 DMSP-20N 20 120 1500 -425 2oo0W 0bar 1800-十 ---1bar 1 2bar 3bar 4bar 200 -----5b3r 1000 2 ---6bar 800 600 400 200 25 h[% 图2-2气动肌肉输出特性曲线 图中1为气动肌肉在工作范围内的极限输出,可以看出在一定压力下,当 收缩率最小时,纤维编织角最小,从而纤维轴向分力较大,同时橡胶的轴向弹 性力也很小,因此此时的气动肌肉输出主要用来驱动负载。2为气动肌肉在最 大气压下的工作输出,从输出曲线可以看出肌肉输出的非线性特点,但是相对 低气压时的输出,非线性情况得到了一定的改善。3为气动肌肉的极限收缩率, 在达到极限收缩率时,气动肌肉纤维编织角最大,所能提供的轴向拉力最小, 而此时橡胶弹力达到最大,几乎完全平衡了纤维的轴向力。因此在极限收缩率 附近,肌肉的负载驱动能力几乎为0,这样气动肌肉的工作收缩范围比理论最 大收缩率小,使肌肉工作行程变小,从而在有轴向尺寸限制的情况下影响肌肉 的应用。4为气动肌肉在被动拉伸到极限长度时的输出。该型号的FESTO肌肉 最大负收缩率为4%,这时气动肌肉被动拉伸,纤维编织角从初始角度开始变 小,能够产生更大的轴向拉力,而且此时橡胶在轴向被拉伸,弹力方向与收缩 时相反,从而使肌肉收缩力达到最大。 -11
哈尔滨工业大学工学硕士学位论文 - 11 - 在 Chou 的基础上加以考虑[32],还有摩擦力的影响以及静摩擦与滑动摩擦边界 问题的因素等被考虑进来,从而进一步完善了气动肌肉的静态模型[33]。 2.3.2 气动肌肉输出特性 本文选用气动肌肉的相关参数如表 2-1 所示,有效长度是指气动肌肉两收 缩端之间的橡胶长度,可以根据需求订制长短;收缩率是气动肌肉收缩量与初 始有效长度之比。图 2-2 为内径 20mm,长 200mm 的 FESTO 气动肌腱的静态 输出特性曲线。 表 2-1 气动肌肉参数 气动肌肉型号 内径(mm) 有效长度(mm) 最大输出(N) 收缩率 h(%) DMSP-10N 10 80 630 -3~25 DMSP-20N 20 120 1500 -4~25 图 2-2 气动肌肉输出特性曲线 图中 1 为气动肌肉在工作范围内的极限输出,可以看出在一定压力下,当 收缩率最小时,纤维编织角最小,从而纤维轴向分力较大,同时橡胶的轴向弹 性力也很小,因此此时的气动肌肉输出主要用来驱动负载。2 为气动肌肉在最 大气压下的工作输出,从输出曲线可以看出肌肉输出的非线性特点,但是相对 低气压时的输出,非线性情况得到了一定的改善。3 为气动肌肉的极限收缩率, 在达到极限收缩率时,气动肌肉纤维编织角最大,所能提供的轴向拉力最小, 而此时橡胶弹力达到最大,几乎完全平衡了纤维的轴向力。因此在极限收缩率 附近,肌肉的负载驱动能力几乎为 0,这样气动肌肉的工作收缩范围比理论最 大收缩率小,使肌肉工作行程变小,从而在有轴向尺寸限制的情况下影响肌肉 的应用。4 为气动肌肉在被动拉伸到极限长度时的输出。该型号的 FESTO 肌肉 最大负收缩率为 4%,这时气动肌肉被动拉伸,纤维编织角从初始角度开始变 小,能够产生更大的轴向拉力,而且此时橡胶在轴向被拉伸,弹力方向与收缩 时相反,从而使肌肉收缩力达到最大
哈尔滨工业大学工学硕士学位论文 综上,气动肌肉驱动器与传统电机驱动相比,更具有爆发力。通过调整合 适的关节半径,产生的输出转矩大于电机输出。虽然气动肌肉的收缩范围小, 但适用与仿生关节转动特点,即关节转动范围一般不超过半周。同时,气动肌 肉可以在高输出的同时,实现低速或者反向运动而不减小驱动使用寿命,能够 很好的适应关节转动过程中的停滞与反转,比电机等更适合作为关节驱动。 2.3.3气动肌肉与生物肌肉对比 与生物肌肉相比,气动肌肉的收缩率和柔韧性较差,瞬时极限爆发力不如 生物肌肉,但是气动肌肉的输出功率大,从而可以弥补收缩率方面的不足。青 蛙肌肉在被动拉伸时,在较大收缩之后才产生输出力,柔韧性非常好2),而气 动肌肉在0bar充气压力下的被动拉伸极限仅为原长4%,增大初始气压可以增 加被动拉伸效果,不过这样会减小肌肉的主动收缩范围。气动肌肉的被动拉伸 是对肌肉工作范围的一种调整方式,将这种被动拉伸应用到机器人设计中,实 现与青蛙在跳跃过程中出现的预张紧现象相似的作用。生物肌肉和气动肌肉都 有着变刚度的特点,这点有利于在仿生机器人关节中的应用。综上,气动肌肉 有着与生物肌肉相似的输出特性,比较适合用于从生物肌骨骼系统层面上的仿 生研究,根据两者特性的不同,在工程领域设计中进行结构的优化和匹配。 2.4机器人电气机械模型的建立 2.4.1机器人机构模型建立 青蛙卓越的跳跃能力来自于其长而有力的后腿,从准备起跳阶段青蛙后腿 几乎完全折叠到离地时刻青蛙后腿的全完伸展,后腿关节在短时间内进行了大 范围转动,并且在一次最大距离跳跃下,腿部肌肉的收缩也达到了最大输出状 态。而前腿在着陆时的运动类似于倒立摆模型的着陆阶段,将其抽象为肩关节 的旋转自由度和肩与地面间的平移自由度组成。由于青蛙在向前跳跃过程中左 右两侧肢体的运动规律基本一致,因此在机构模型建立时可以只考虑单侧模型, 气动肌肉驱动的机构模型示意图如图2-3所示。 生物肌肉自身有较大柔韧性,通过肌腱等柔性件与骨骼相连,直接作用于 骨骼上,效率高:而且一个关节通常由肌肉群形成拮抗肌形式将关节转动与关 节刚度解耦。气动肌肉由于结构尺寸相对生物肌肉较大,横向不能受力和产生 位移,因此将气动肌肉直接与骨骼相连,从而没有复杂的传动装置,使用弹簧 进行关节的复位等操作。 -12-
哈尔滨工业大学工学硕士学位论文 - 12 - 综上,气动肌肉驱动器与传统电机驱动相比,更具有爆发力。通过调整合 适的关节半径,产生的输出转矩大于电机输出。虽然气动肌肉的收缩范围小, 但适用与仿生关节转动特点,即关节转动范围一般不超过半周。同时,气动肌 肉可以在高输出的同时,实现低速或者反向运动而不减小驱动使用寿命,能够 很好的适应关节转动过程中的停滞与反转,比电机等更适合作为关节驱动。 2.3.3 气动肌肉与生物肌肉对比 与生物肌肉相比,气动肌肉的收缩率和柔韧性较差,瞬时极限爆发力不如 生物肌肉,但是气动肌肉的输出功率大,从而可以弥补收缩率方面的不足。青 蛙肌肉在被动拉伸时,在较大收缩之后才产生输出力,柔韧性非常好[29],而气 动肌肉在 0bar 充气压力下的被动拉伸极限仅为原长 4%,增大初始气压可以增 加被动拉伸效果,不过这样会减小肌肉的主动收缩范围。气动肌肉的被动拉伸 是对肌肉工作范围的一种调整方式,将这种被动拉伸应用到机器人设计中,实 现与青蛙在跳跃过程中出现的预张紧现象相似的作用。生物肌肉和气动肌肉都 有着变刚度的特点,这点有利于在仿生机器人关节中的应用。综上,气动肌肉 有着与生物肌肉相似的输出特性,比较适合用于从生物肌骨骼系统层面上的仿 生研究,根据两者特性的不同,在工程领域设计中进行结构的优化和匹配。 2.4 机器人电气机械模型的建立 2.4.1 机器人机构模型建立 青蛙卓越的跳跃能力来自于其长而有力的后腿,从准备起跳阶段青蛙后腿 几乎完全折叠到离地时刻青蛙后腿的全完伸展,后腿关节在短时间内进行了大 范围转动,并且在一次最大距离跳跃下,腿部肌肉的收缩也达到了最大输出状 态。而前腿在着陆时的运动类似于倒立摆模型的着陆阶段,将其抽象为肩关节 的旋转自由度和肩与地面间的平移自由度组成。由于青蛙在向前跳跃过程中左 右两侧肢体的运动规律基本一致,因此在机构模型建立时可以只考虑单侧模型, 气动肌肉驱动的机构模型示意图如图 2-3 所示。 生物肌肉自身有较大柔韧性,通过肌腱等柔性件与骨骼相连,直接作用于 骨骼上,效率高;而且一个关节通常由肌肉群形成拮抗肌形式将关节转动与关 节刚度解耦。气动肌肉由于结构尺寸相对生物肌肉较大,横向不能受力和产生 位移,因此将气动肌肉直接与骨骼相连,从而没有复杂的传动装置,使用弹簧 进行关节的复位等操作