哈尔滨工业大学工学硕士学位论文 目 录 摘要 ABSTRACT......... 第1章绪论 ..1 1.1课题背景.… .1 1.2仿生跳跃机器人的研究现状 2 1.2.1国外研究现状 2 1.2.2国内研究现状 1.3气动肌肉驱动器综述 6 1.4主要研究内容 7 第2章仿青蛙跳跃机器人设计 8 2.1引言 2.2青蛙生物特征 6 2.2.1青蛙运动特征.… 2.2.2青蛙腿部伸肌分析 8 2.2.3影响肌肉作用效果的参数 10 2.3气动肌肉特性. 10 2.3.1气动肌肉模型介绍 10 2.3.2气动肌肉输出特性 2.3.3气动肌肉与生物肌肉对比 12 2.4机器人电气机械模型的建立 12 2.4.1机器人机构模型建立 12 2.4.2机器人机械机构设计 13 2.4.3机器人电气系统模型 16 2.5本章小结.… 16 第3章机器人运动学分析… 17 3.1引言… 17 3.2地面阶段运动学分析 17 3.2.1机器人运动模型的建立 17 3.2.2正运动学问题 19 3.2.3逆运动学问题 20 3.2.4地面阶段速度求解 22 --
哈尔滨工业大学工学硕士学位论文 - III - 目 录 摘 要...............................................................................................................................I ABSTRACT.....................................................................................................................II 第 1 章 绪 论 ................................................................................................................1 1.1 课题背景................................................................................................................1 1.2 仿生跳跃机器人的研究现状 ..............................................................................2 1.2.1 国外研究现状................................................................................................2 1.2.2 国内研究现状................................................................................................4 1.3 气动肌肉驱动器综述...........................................................................................6 1.4 主要研究内容 .......................................................................................................7 第 2 章 仿青蛙跳跃机器人设计 ...................................................................................8 2.1 引言 ........................................................................................................................8 2.2 青蛙生物特征 .......................................................................................................8 2.2.1 青蛙运动特征................................................................................................8 2.2.2 青蛙腿部伸肌分析 .......................................................................................8 2.2.3 影响肌肉作用效果的参数........................................................................ 10 2.3 气动肌肉特性 .................................................................................................... 10 2.3.1 气动肌肉模型介绍 .................................................................................... 10 2.3.2 气动肌肉输出特性 .....................................................................................11 2.3.3 气动肌肉与生物肌肉对比........................................................................ 12 2.4 机器人电气机械模型的建立 ........................................................................... 12 2.4.1 机器人机构模型建立 ................................................................................ 12 2.4.2 机器人机械机构设计 ................................................................................ 13 2.4.3 机器人电气系统模型 ................................................................................ 16 2.5 本章小结............................................................................................................. 16 第 3 章 机器人运动学分析 ........................................................................................ 17 3.1 引言 ..................................................................................................................... 17 3.2 地面阶段运动学分析........................................................................................ 17 3.2.1 机器人运动模型的建立 ............................................................................ 17 3.2.2 正运动学问题............................................................................................. 19 3.2.3 逆运动学问题............................................................................................. 20 3.2.4 地面阶段速度求解 .................................................................................... 22
哈尔滨工业大学工学硕士学位论文 3.3腾空阶段运动学分析 23 3.3.1机器人模型的建立 23 3.3.2正运动学问题 24 3.3.3逆运动学问题 26 3.4气动肌肉的运动学分析 27 3.4.1滑块位移… 27 3.4.2关节运动分析 28 34.3气动肌肉收缩量的计算 28 3.4.4气动肌肉运动学逆问题 30 3.5本章小结 32 第4章机器人动力学分析与关节轨迹规划 33 4.1引言 33 4.2起跳阶段动力学分析 33 4.2.1动力学方程的建立 。。 33 4.2.2起跳判据分析 36 4.3腾空阶段动力学分析 37 4.4着陆阶段动力学分析 40 4.4.1机器人落地过程 40 4.4.2动力学方程的建立 40 4.5跳跃轨迹规划 42 4.5.1轨迹规划模型的建立 42 4.5.2基于遗传算法的轨迹规划 44 4.6 MATLAB仿真结果 44 4.6.1轨迹规划结果 44 4.6.2动力学方程验证 48 4.7本章小结.… 49 第5章仿真与实验 50 5.1引言… 50 5.2跳跃机器人仿真 50 5.2.1基于ADAMS的虚拟仪器仿真 50 5.2.2运动学方程的验证 51 5.3仿青蛙弹跳腿起跳实验 53 5.3.1弹跳腿样机实验平台 53 5.3.2机器人跳跃实验 54 -V-
哈尔滨工业大学工学硕士学位论文 - IV - 3.3 腾空阶段运动学分析........................................................................................ 23 3.3.1 机器人模型的建立 .................................................................................... 23 3.3.2 正运动学问题............................................................................................. 24 3.3.3 逆运动学问题............................................................................................. 26 3.4 气动肌肉的运动学分析.................................................................................... 27 3.4.1 滑块位移 ..................................................................................................... 27 3.4.2 关节运动分析............................................................................................. 28 3.4.3 气动肌肉收缩量的计算 ............................................................................ 28 3.4.4 气动肌肉运动学逆问题 ............................................................................ 30 3.5 本章小结............................................................................................................. 32 第 4 章 机器人动力学分析与关节轨迹规划 ........................................................... 33 4.1 引言 ..................................................................................................................... 33 4.2 起跳阶段动力学分析........................................................................................ 33 4.2.1 动力学方程的建立 .................................................................................... 33 4.2.2 起跳判据分析............................................................................................. 36 4.3 腾空阶段动力学分析........................................................................................ 37 4.4 着陆阶段动力学分析........................................................................................ 40 4.4.1 机器人落地过程......................................................................................... 40 4.4.2 动力学方程的建立 .................................................................................... 40 4.5 跳跃轨迹规划 .................................................................................................... 42 4.5.1 轨迹规划模型的建立 ................................................................................ 42 4.5.2 基于遗传算法的轨迹规划........................................................................ 44 4.6 MATLAB 仿真结果 .............................................................................................. 44 4.6.1 轨迹规划结果............................................................................................. 44 4.6.2 动力学方程验证......................................................................................... 48 4.7 本章小结............................................................................................................. 49 第 5 章 仿真与实验..................................................................................................... 50 5.1 引言 ..................................................................................................................... 50 5.2 跳跃机器人仿真 ................................................................................................ 50 5.2.1 基于 ADAMS 的虚拟仪器仿真 ............................................................... 50 5.2.2 运动学方程的验证 .................................................................................... 51 5.3 仿青蛙弹跳腿起跳实验.................................................................................... 53 5.3.1 弹跳腿样机实验平台 ................................................................................ 53 5.3.2 机器人跳跃实验......................................................................................... 54
哈尔滨工业大学工学硕士学位论文 5.4本章小结 56 结论 57 参考文献 58 攻读学位期间发表的学术论文 61 哈尔滨工业大学学位论文原创性声明及使用授权说明.… 62 致谢. 63 -V-
哈尔滨工业大学工学硕士学位论文 - V - 5.4 本章小结............................................................................................................. 56 结 论............................................................................................................................ 57 参考文献........................................................................................................................ 58 攻读学位期间发表的学术论文 .................................................................................. 61 哈尔滨工业大学学位论文原创性声明及使用授权说明 ........................................ 62 致 谢............................................................................................................................ 63
哈尔滨工业大学工学硕士学位论文 第1章绪论 1.1课题背景 随着机器人技术的不断发展,机器人的移动方式在不断改进,跳跃机器人 能够比传统的轮式和履带式移动机器人更加适应非结构化环境。对有越障要求 以及危险工作环境的任务,跳跃机器人也能够充分发挥自身的移动优势,实现 更加灵活的自主运动和更加优秀的任务处理能力。 跳跃机器人运动轨迹为一系列离散的着地和起跳点,因此对不平整地面有 较好的适应性。在越障任务中,机器人可以跳跃超过自身尺寸数倍或者数十倍 的障碍以及沟壑,充分体现出跳跃运动方式的优势山。同时,在空间星系探索 中,例如月球等微重力环境下,跳跃运动能够实现更有效率的运动。此外, 在抢险救灾活动中,跳跃机器人具有的爆发性和灵活性等特点,有助于实现避 障,从而能够较好的应对各种不确定状况]。 生物在自然界中经过了数百万年的不断演变,身体功能在结构上实现了刚 性与柔性的完美统一,仿生研究因此有着广阔的素材空间。腿式跳跃机器人是 通过仿生学原理,将机器人的设计从生物形态上或者结构功能上转化为工程领 域中的样机4。腿式跳跃机器人的研究可以参考袋鼠,蝗虫,跳蚤,青蛙等生 物来进行研究。这些跳跃中,袋鼠的跳跃运动属于连续型跳跃,即两次跳跃的 时间间隔很小,在跳跃过程中动态的调整姿态和补充能量,这种方式有利于能 量在跳跃过程中的循环利用:而青蛙的运动属于间歇型跳跃,即在两次跳跃之 间存在明显的地面调整阶段,因而能够提高单次跳跃的水平。青蛙具有卓越的 跳跃能力,主要依靠弹跳后腿起跳,前腿进行着陆缓冲,具有较大的研究价值, 并且青蛙属于两栖动物,对日后进行两栖机器人的研究也有一定意义。起跳过 程经历时间短,爆发力强,起跳过程姿态不易控制,这些特点是研究驱动和控 制方面的难点。 目前更多种类的驱动得到研究并且逐渐应用到机器人中,从传统的电机、 发动机驱动方式,发展到以液压气动,生物能量,化学能量为能量源的驱动方 式,并且各自有着不同的优点。其中气动驱动方式,能源清洁,效率高,空气 有一定可压缩性,从而起到过载保护作用,适合应用到机器人的驱动中。 因此,研究以青蛙为原型的气动仿青蛙跳跃机器人有着重要意义。本文资 助来源于国家自然科学基金(51005052)“面向两栖应用的青蛙仿生机器人运动 机理研究
哈尔滨工业大学工学硕士学位论文 - 1 - 第1章 绪 论 1.1 课题背景 随着机器人技术的不断发展,机器人的移动方式在不断改进,跳跃机器人 能够比传统的轮式和履带式移动机器人更加适应非结构化环境。对有越障要求 以及危险工作环境的任务,跳跃机器人也能够充分发挥自身的移动优势,实现 更加灵活的自主运动和更加优秀的任务处理能力。 跳跃机器人运动轨迹为一系列离散的着地和起跳点,因此对不平整地面有 较好的适应性。在越障任务中,机器人可以跳跃超过自身尺寸数倍或者数十倍 的障碍以及沟壑,充分体现出跳跃运动方式的优势[ 1]。同时,在空间星系探索 中,例如月球等微重力环境下,跳跃运动能够实现更有效率的运动[2]。此外, 在抢险救灾活动中,跳跃机器人具有的爆发性和灵活性等特点,有助于实现避 障,从而能够较好的应对各种不确定状况[3]。 生物在自然界中经过了数百万年的不断演变,身体功能在结构上实现了刚 性与柔性的完美统一,仿生研究因此有着广阔的素材空间。腿式跳跃机器人是 通过仿生学原理,将机器人的设计从生物形态上或者结构功能上转化为工程领 域中的样机[4]。腿式跳跃机器人的研究可以参考袋鼠,蝗虫,跳蚤,青蛙等生 物来进行研究。这些跳跃中,袋鼠的跳跃运动属于连续型跳跃,即两次跳跃的 时间间隔很小,在跳跃过程中动态的调整姿态和补充能量,这种方式有利于能 量在跳跃过程中的循环利用;而青蛙的运动属于间歇型跳跃,即在两次跳跃之 间存在明显的地面调整阶段,因而能够提高单次跳跃的水平。青蛙具有卓越的 跳跃能力,主要依靠弹跳后腿起跳,前腿进行着陆缓冲,具有较大的研究价值, 并且青蛙属于两栖动物,对日后进行两栖机器人的研究也有一定意义。起跳过 程经历时间短,爆发力强,起跳过程姿态不易控制,这些特点是研究驱动和控 制方面的难点。 目前更多种类的驱动得到研究并且逐渐应用到机器人中,从传统的电机、 发动机驱动方式,发展到以液压气动,生物能量,化学能量为能量源的驱动方 式,并且各自有着不同的优点。其中气动驱动方式,能源清洁,效率高,空气 有一定可压缩性,从而起到过载保护作用,适合应用到机器人的驱动中。 因此,研究以青蛙为原型的气动仿青蛙跳跃机器人有着重要意义。本文资 助来源于国家自然科学基金(51005052) ―面向两栖应用的青蛙仿生机器人运动 机理研究‖
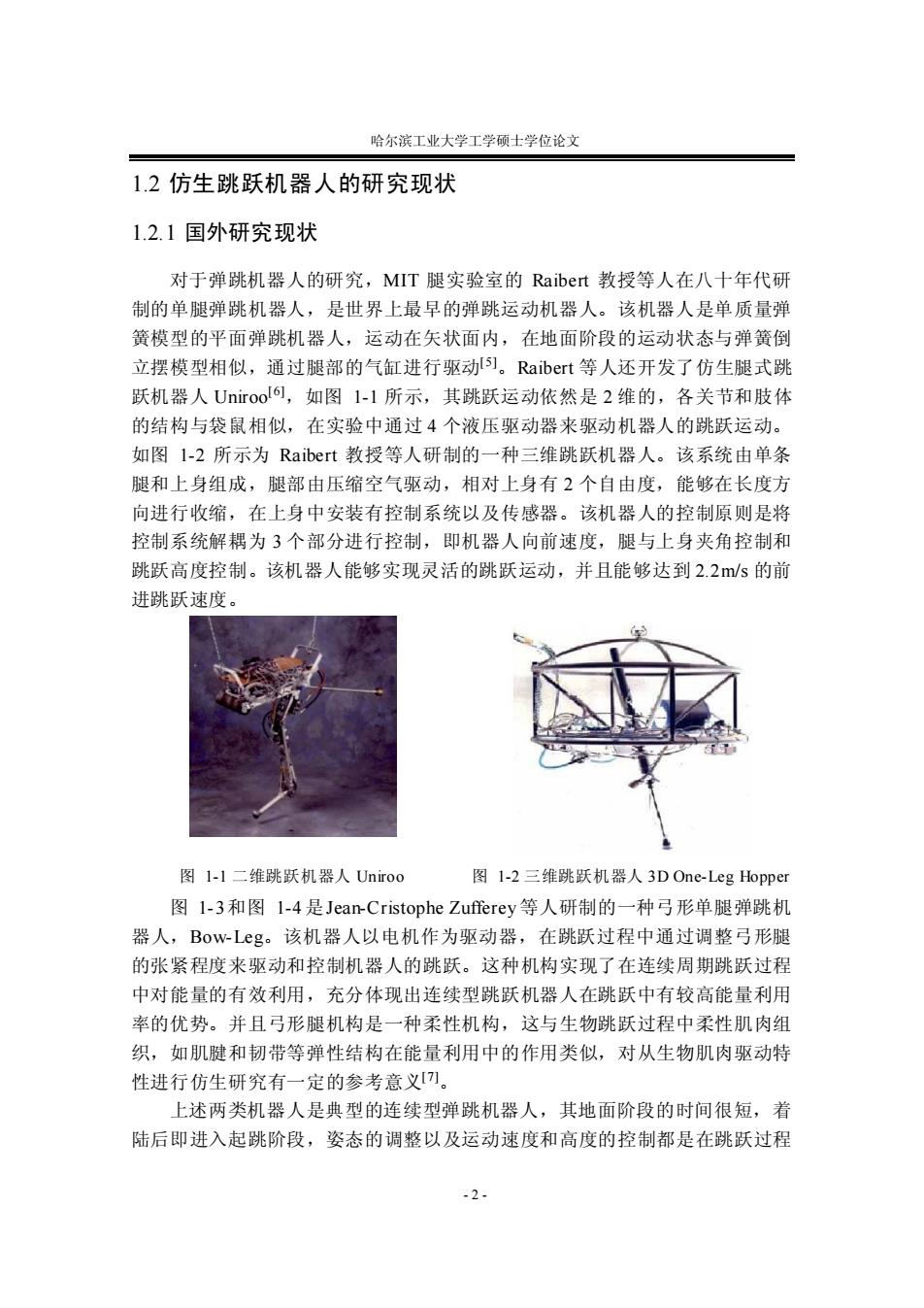
哈尔滨工业大学工学硕士学位论文 1.2仿生跳跃机器人的研究现状 1.2.1国外研究现状 对于弹跳机器人的研究,MIT腿实验室的Raibert教授等人在八十年代研 制的单腿弹跳机器人,是世界上最早的弹跳运动机器人。该机器人是单质量弹 簧模型的平面弹跳机器人,运动在矢状面内,在地面阶段的运动状态与弹簧倒 立摆模型相似,通过腿部的气缸进行驱动s]。Raibert等人还开发了仿生腿式跳 跃机器人Uniroo6,如图1-1所示,其跳跃运动依然是2维的,各关节和肢体 的结构与袋鼠相似,在实验中通过4个液压驱动器来驱动机器人的跳跃运动。 如图1-2所示为Raibert教授等人研制的一种三维跳跃机器人。该系统由单条 腿和上身组成,腿部由压缩空气驱动,相对上身有2个自由度,能够在长度方 向进行收缩,在上身中安装有控制系统以及传感器。该机器人的控制原则是将 控制系统解耦为3个部分进行控制,即机器人向前速度,腿与上身夹角控制和 跳跃高度控制。该机器人能够实现灵活的跳跃运动,并且能够达到2.2/s的前 进跳跃速度。 图1-1二维跳跃机器人Uniroo 图1-2三维跳跃机器人3DOne-Leg Hopper 图1-3和图1-4是Jean-Cristophe Zufferey等人研制的一种弓形单腿弹跳机 器人,Bow-Lg。该机器人以电机作为驱动器,在跳跃过程中通过调整弓形腿 的张紧程度来驱动和控制机器人的跳跃。这种机构实现了在连续周期跳跃过程 中对能量的有效利用,充分体现出连续型跳跃机器人在跳跃中有较高能量利用 率的优势。并且弓形腿机构是一种柔性机构,这与生物跳跃过程中柔性肌肉组 织,如肌腱和韧带等弹性结构在能量利用中的作用类似,对从生物肌肉驱动特 性进行仿生研究有一定的参考意义刀。 上述两类机器人是典型的连续型弹跳机器人,其地面阶段的时间很短,着 陆后即进入起跳阶段,姿态的调整以及运动速度和高度的控制都是在跳跃过程 -2
哈尔滨工业大学工学硕士学位论文 - 2 - 1.2 仿生跳跃机器人的研究现状 1.2.1 国外研究现状 对于弹跳机器人的研究,MIT 腿实验室的 Raibert 教授等人在八十年代研 制的单腿弹跳机器人,是世界上最早的弹跳运动机器人。该机器人是单质量弹 簧模型的平面弹跳机器人,运动在矢状面内,在地面阶段的运动状态与弹簧倒 立摆模型相似,通过腿部的气缸进行驱动[5]。Raibert 等人还开发了仿生腿式跳 跃机器人 Uniroo[6],如图 1-1 所示,其跳跃运动依然是 2 维的,各关节和肢体 的结构与袋鼠相似,在实验中通过 4 个液压驱动器来驱动机器人的跳跃运动。 如图 1-2 所示为 Raibert 教授等人研制的一种三维跳跃机器人。该系统由单条 腿和上身组成,腿部由压缩空气驱动,相对上身有 2 个自由度,能够在长度方 向进行收缩,在上身中安装有控制系统以及传感器。该机器人的控制原则是将 控制系统解耦为 3 个部分进行控制,即机器人向前速度,腿与上身夹角控制和 跳跃高度控制。该机器人能够实现灵活的跳跃运动,并且能够达到 2.2m/s 的前 进跳跃速度。 图 1-1 二维跳跃机器人 Uniroo 图 1-2 三维跳跃机器人 3D One-Leg Hopper 图 1-3和图 1-4 是Jean-Cristophe Zufferey等人研制的一种弓形单腿弹跳机 器人,Bow-Leg。该机器人以电机作为驱动器,在跳跃过程中通过调整弓形腿 的张紧程度来驱动和控制机器人的跳跃。这种机构实现了在连续周期跳跃过程 中对能量的有效利用,充分体现出连续型跳跃机器人在跳跃中有较高能量利用 率的优势。并且弓形腿机构是一种柔性机构,这与生物跳跃过程中柔性肌肉组 织,如肌腱和韧带等弹性结构在能量利用中的作用类似,对从生物肌肉驱动特 性进行仿生研究有一定的参考意义[7]。 上述两类机器人是典型的连续型弹跳机器人,其地面阶段的时间很短,着 陆后即进入起跳阶段,姿态的调整以及运动速度和高度的控制都是在跳跃过程