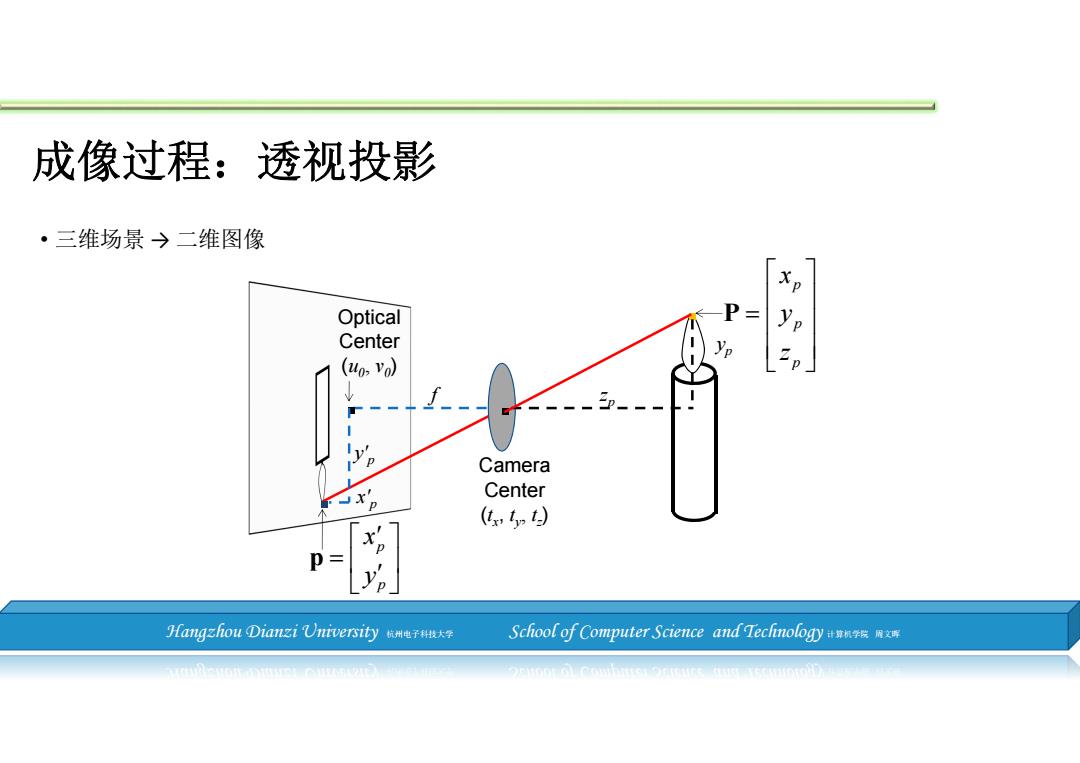
成像过程:透视投影 ·三维场景→二维图像 Optical P= Center (uo vo) Camera Center (tx,ty D) p= Hangzhou D1 ianzi Univer亦it内y航州电子技大学 School of Computer Science and Technology
Hangzhou Dianzi University 杭州电子科技大学 School of Computer Science and Technology 计算机学院 周文晖 成像过程:透视投影 • 三维场景 → 二维图像 Camera Center (tx, ty, tz) p p p x y z . P . . f zp yp p p x y p . Optical Center (u0, v0) y'p x'p
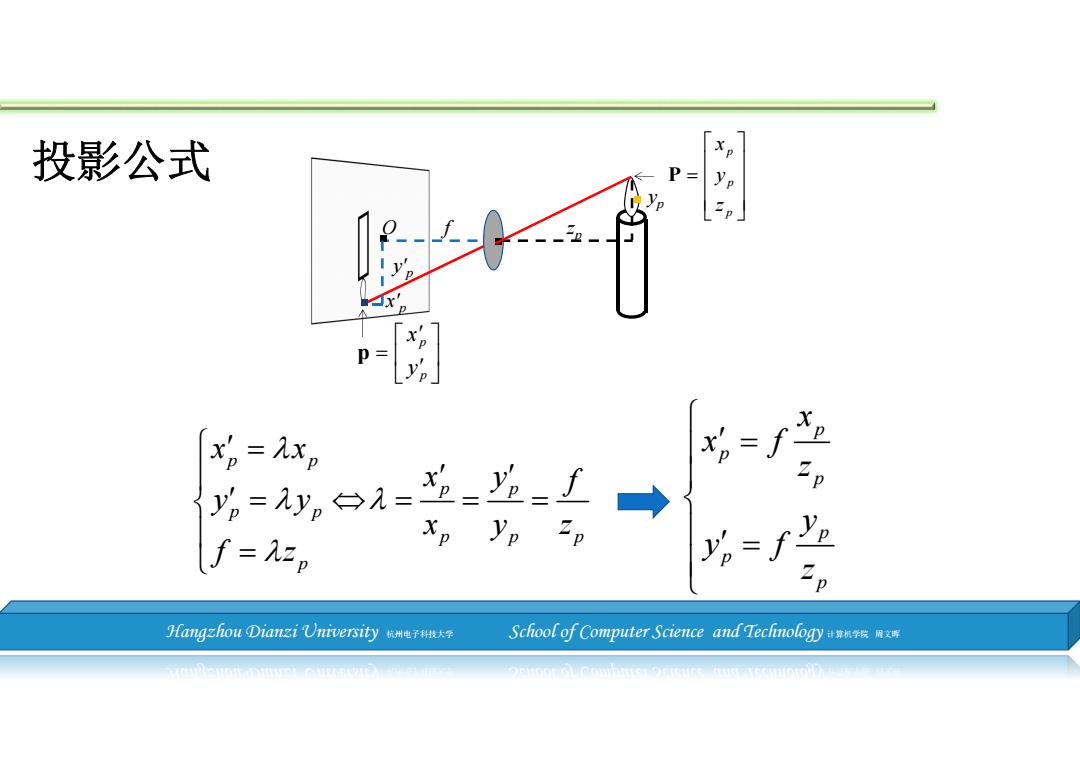
投影公式 P= [ x2=元xp → Xp yp f=元2p y,=、 Hangzhou Dianzi Univer方ity杭州电子技大年 School of Computer Science and Technology算机学mx年
Hangzhou Dianzi University 杭州电子科技大学 School of Computer Science and Technology 计算机学院 周文晖 投影公式 p p p x y z P . . . f zp yp p p x y p . y'p x'p p p p p p p p pp p x x x y f y y x y z f z O p p p p p p x x f z y y f z
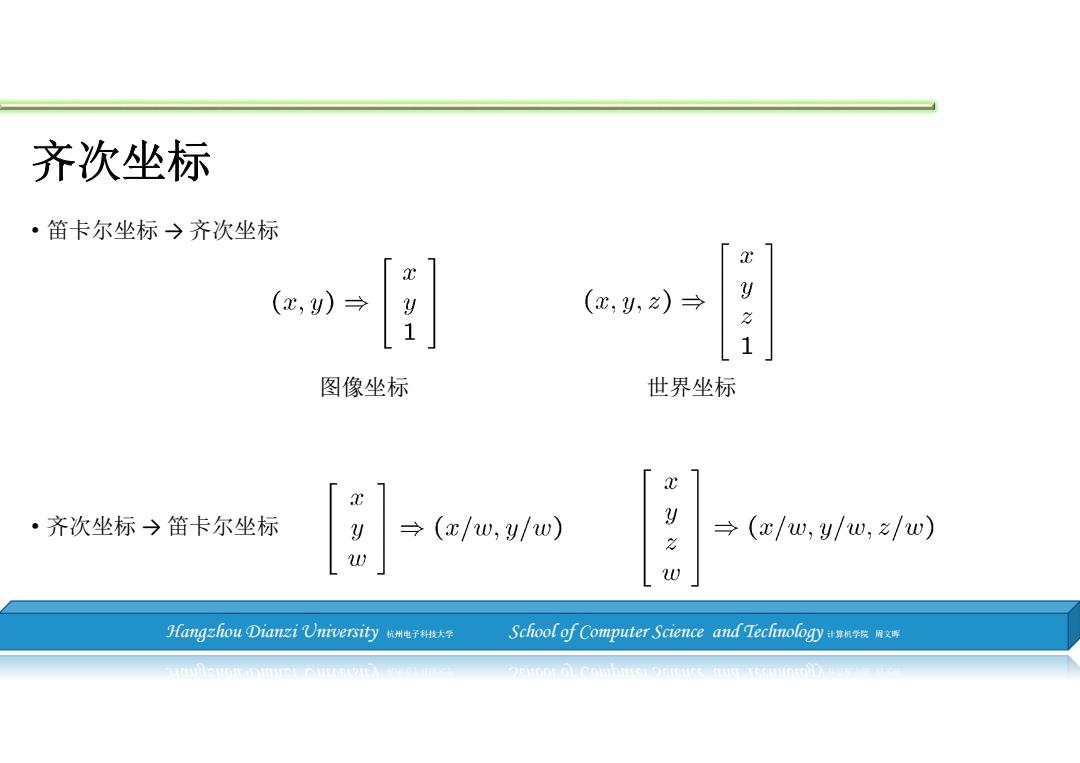
齐次坐标 ·笛卡尔坐标→齐次坐标 (x,y)→ 91 (c,y,z)→ y 都 图像坐标 世界坐标 ·齐次坐标→笛卡尔坐标 , →(x/w,y/w) y →(x/,y/w,z/w) 0 Hangzhou D1 ianzi Univer容ity板州电子H技大学 School of Computer Science and Technology
Hangzhou Dianzi University 杭州电子科技大学 School of Computer Science and Technology 计算机学院 周文晖 齐次坐标 • 笛卡尔坐标 → 齐次坐标 • 齐次坐标 → 笛卡尔坐标 图像坐标 世界坐标
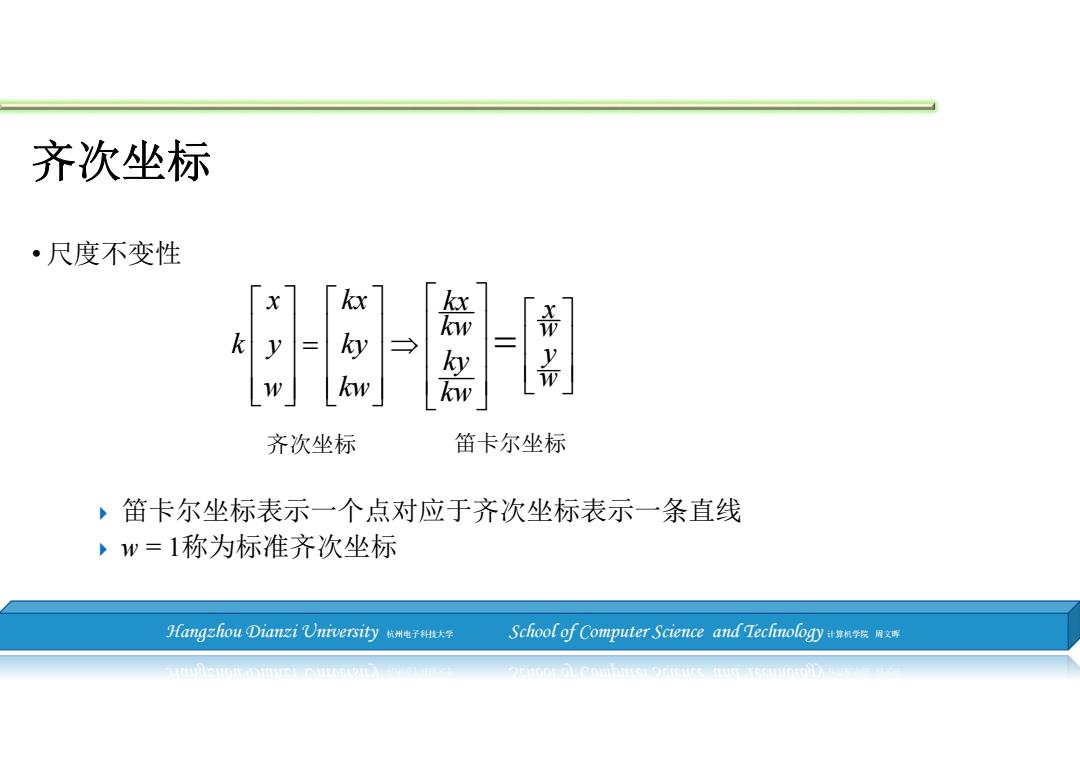
齐次坐标 ·尺度不变性 「kx k 三 y → 年 齐次坐标 笛卡尔坐标 ,笛卡尔坐标表示一个点对应于齐次坐标表示一条直线 ,w=1称为标准齐次坐标 Hangzhou Dianzi Univer方ity杭州电子技大年 School of Computer Science and Technology
Hangzhou Dianzi University 杭州电子科技大学 School of Computer Science and Technology 计算机学院 周文晖 齐次坐标 • 尺度不变性 kx x kw w y ky w kw x kx k y ky w kw 齐次坐标 笛卡尔坐标 笛卡尔坐标表示一个点对应于齐次坐标表示一条直线 w = 1称为标准齐次坐标
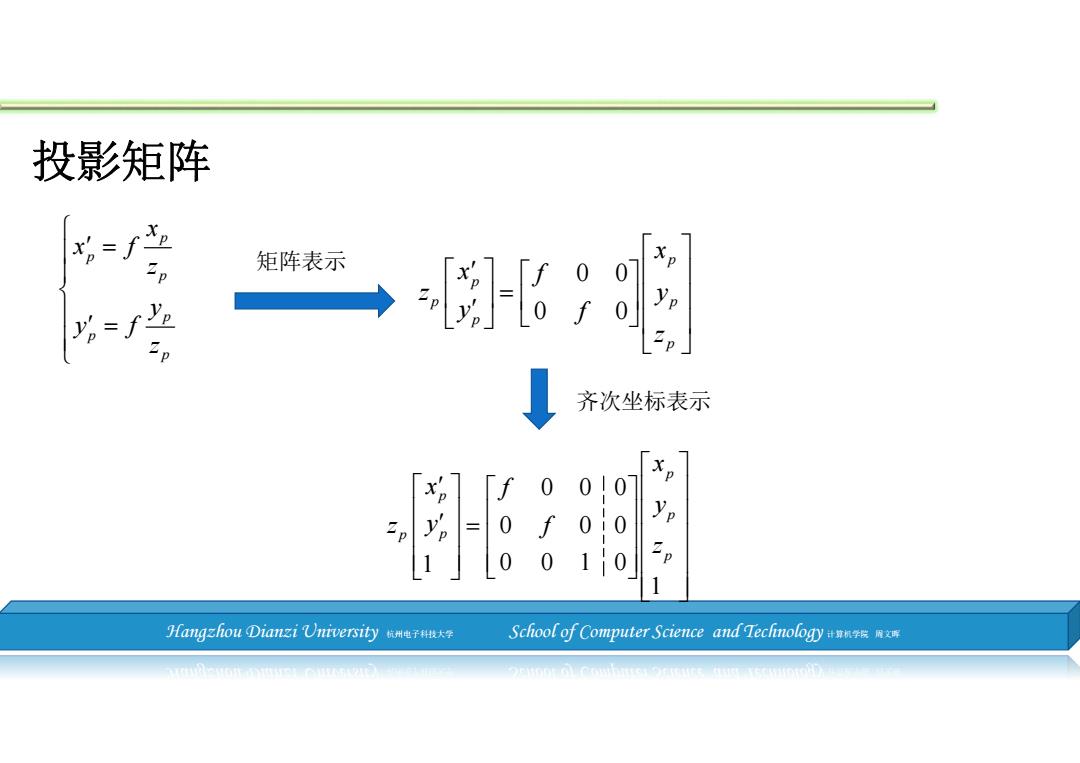
投影矩阵 x=f2 :8 矩阵表示 Yp =f 齐次坐标表示 「f 000 0 f 00 Yp 1 0 0 10 Hangzhou①1 mzi Univer亦t内y杭州电子大学 School of Computer Science and Technology
Hangzhou Dianzi University 杭州电子科技大学 School of Computer Science and Technology 计算机学院 周文晖 投影矩阵 矩阵表示 p p p p p p x x f z y y f z 000 0 00 1 0 010 1 p p p p p p x x f y z f y z 0 0 0 0 p p p p p p x x f z y y f z 齐次坐标表示