
哈尔滨工业大学工学硕士学位论文 个行走阶段和一个飞行阶段组成。 南京航空航天大学刘壮志提出多种机器人实现方案,对单杆弹跳机构和 六杆弹跳机构完成了理论分析和设计制作,分析了弹跳机器人运动序列规划 及控制问题。对五种典型弹跳机构进行了运动学及动力学分析,研究了落地 碰撞和能量消耗问题3。 1.3.2弹跳机器人的类型 弹跳机器人的本体部分为弹跳机构。目前弹跳机构构造有两类方法: 一类是方式是利用简单机构产生弹力,这种方法机构自由度少,动力学模型 简单,实现起来相对容易。根据其能量积累方式的不同可分为钟摆型刀、弹 射型、混合型。另一类是模仿自然界生物的弹跳动作的仿生弹跳机构,如前 面所述的机械蟋蟀。其特点是自由度多,运动灵活,对环境的适应能力强, 但其跳跃运动需要多关节协同工作,实现稳定运动难度较大。因此目前仍处 于理论探索和试验研究阶段。故按弹跳机构的运动机理不同可以将跳跃机器 人分为弹跳式机器人、仿生跳跃机器人和其他类型的弹跳机器人。其他类型 弹跳机器人采用一些特殊能源方式,比如气体爆炸产生的爆炸力来实现弹跳, 如前面所述的利用碳化氢作燃料的弹跳活塞机构。 另外,弹跳机器人从运动形式上一般分为连续弹跳机器人和间歇弹跳机 器人两类。一种作连续性的弹跳运动,即足部接触地面后在很短的时间内再 次弹跳,机构的能量补充、姿态调整、起跳参数设置和着落点预测都是动态 完成的。前面的弓形单足弹跳机器人就是这种类型。另外一类弹跳机器人作 间隙性运动,即经过一次弹跳后,需要短暂的时间来进行位姿调整、能量存 储和地形预测等,为再次弹跳做准备。间歇性弹跳机器人的运动速度或频率 没有连续性弹跳机器人快,其运动基本可分为起跳、飞行、落地(可能翻转)、 调整、再次起跳4个阶段,比连续性弹跳多了一个地面调整过程。这一过程 主要是重新存储弹性势能,调整弹跳方位,进行地形预测,并且如果发生落 地翻转,还要设法回复到预备弹跳的姿态。间歇性弹跳不像连续性弹跳那样 要在每时每刻都保持对机构姿态的绝对控制,它可以分段控制,即控制机构 积累能量并向预定方向释放后,在飞行过程中不再加以控制,当机构落地后 再进行调整。这种方式明显简化了控制过程,而且不影响弹跳机构的实际功 能。前面所述的蛙形弹跳机就是间歇性弹跳机器人
哈尔滨工业大学工学硕士学位论文 8 个行走阶段和一个飞行阶段组成。 南京航空航天大学刘壮志提出多种机器人实现方案,对单杆弹跳机构和 六杆弹跳机构完成了理论分析和设计制作,分析了弹跳机器人运动序列规划 及控制问题。对五种典型弹跳机构进行了运动学及动力学分析,研究了落地 碰撞和能量消耗问题[39]。 1.3.2 弹跳机器人的类型 弹跳机器人的本体部分为弹跳机构。目前弹跳机构构造有两类方法[2]: 一类是方式是利用简单机构产生弹力,这种方法机构自由度少,动力学模型 简单,实现起来相对容易。根据其能量积累方式的不同可分为钟摆型[37]、弹 射型、混合型。另一类是模仿自然界生物的弹跳动作的仿生弹跳机构,如前 面所述的机械蟋蟀。其特点是自由度多,运动灵活,对环境的适应能力强, 但其跳跃运动需要多关节协同工作,实现稳定运动难度较大。因此目前仍处 于理论探索和试验研究阶段。故按弹跳机构的运动机理不同可以将跳跃机器 人分为弹跳式机器人、仿生跳跃机器人和其他类型的弹跳机器人。其他类型 弹跳机器人采用一些特殊能源方式,比如气体爆炸产生的爆炸力来实现弹跳, 如前面所述的利用碳化氢作燃料的弹跳活塞机构。 另外,弹跳机器人从运动形式上一般分为连续弹跳机器人和间歇弹跳机 器人两类。一种作连续性的弹跳运动,即足部接触地面后在很短的时间内再 次弹跳,机构的能量补充、姿态调整、起跳参数设置和着落点预测都是动态 完成的。前面的弓形单足弹跳机器人就是这种类型。另外一类弹跳机器人作 间隙性运动,即经过一次弹跳后,需要短暂的时间来进行位姿调整、能量存 储和地形预测等,为再次弹跳做准备。间歇性弹跳机器人的运动速度或频率 没有连续性弹跳机器人快,其运动基本可分为起跳、飞行、落地(可能翻转)、 调整、再次起跳 4 个阶段,比连续性弹跳多了一个地面调整过程。这一过程 主要是重新存储弹性势能,调整弹跳方位,进行地形预测,并且如果发生落 地翻转,还要设法回复到预备弹跳的姿态。间歇性弹跳不像连续性弹跳那样 要在每时每刻都保持对机构姿态的绝对控制,它可以分段控制,即控制机构 积累能量并向预定方向释放后,在飞行过程中不再加以控制,当机构落地后 再进行调整。这种方式明显简化了控制过程,而且不影响弹跳机构的实际功 能。前面所述的蛙形弹跳机就是间歇性弹跳机器人
哈尔滨工业大学工学硕士学位论文 1.4本课题的主要研究内容 本课题主要进行仿青蛙跳跃机器人运动机理的研究。首先确定一套实验 方法来获取青蛙跳跃运动的轨迹信息,并进行实验,研究生物运动机理:通 过对青蛙生物特征和跳跃运动轨迹的研究,抽象出仿青蛙跳跃机器人机构模 型,然后针对模型进行运动学、动力学研究及青蛙简化模型的运动仿真,进 一步揭示青蛙跳跃运动机理:最后基于分析结果,进行机构设计计算及仿真。 (1)收集国内外相关资料,设计研究及实验方法,制定实验方案。依照 方案进行实验,拍摄青蛙的跳跃过程,并从中提取青蛙各关节点的运动轨迹, 以备后续研究使用。 (2)在熟悉和掌握国内外跳跃机器人文献资料的基础上,结合己有的实 验数据,研究总结青蛙的结构特征、运动步态,主要跳跃运动特征和各运动 参数等,在此基础上分析青蛙的跳跃机理。为仿青蛙跳跃机器人的研究提供 原始数据和研究方向。 (3)为了从仿生学的角度研究青蛙的跳跃运动机理,通过分析青蛙运动 结构,确定各结构尺寸和各运动关节转角及其变化范围,建立仿青蛙跳跃机 器人机构模型。建立运动学模型的坐标系,研究各坐标系之间的转换矩阵, 并研究仿青蛙跳跃机器人的运动学分析的正问题和逆问题。基于分析和实验 相关数据,在计算机上对建立的仿青蛙跳跃机构运动模型进行仿真。 (4)利用青蛙的跳跃运动机理,对应用于仿青蛙跳跃机器人的机构模型 进行分析,最终将上述理论分析基础应用于实际设计中,并利用机构的仿真 来论证这种跳跃机理的实用性。 9
哈尔滨工业大学工学硕士学位论文 9 1.4 本课题的主要研究内容 本课题主要进行仿青蛙跳跃机器人运动机理的研究。首先确定一套实验 方法来获取青蛙跳跃运动的轨迹信息,并进行实验,研究生物运动机理;通 过对青蛙生物特征和跳跃运动轨迹的研究,抽象出仿青蛙跳跃机器人机构模 型,然后针对模型进行运动学、动力学研究及青蛙简化模型的运动仿真,进 一步揭示青蛙跳跃运动机理;最后基于分析结果,进行机构设计计算及仿真。 (1) 收集国内外相关资料,设计研究及实验方法,制定实验方案。依照 方案进行实验,拍摄青蛙的跳跃过程,并从中提取青蛙各关节点的运动轨迹, 以备后续研究使用。 (2) 在熟悉和掌握国内外跳跃机器人文献资料的基础上,结合己有的实 验数据,研究总结青蛙的结构特征、运动步态,主要跳跃运动特征和各运动 参数等,在此基础上分析青蛙的跳跃机理。为仿青蛙跳跃机器人的研究提供 原始数据和研究方向。 (3) 为了从仿生学的角度研究青蛙的跳跃运动机理,通过分析青蛙运动 结构,确定各结构尺寸和各运动关节转角及其变化范围,建立仿青蛙跳跃机 器人机构模型。建立运动学模型的坐标系,研究各坐标系之间的转换矩阵, 并研究仿青蛙跳跃机器人的运动学分析的正问题和逆问题。基于分析和实验 相关数据,在计算机上对建立的仿青蛙跳跃机构运动模型进行仿真。 (4) 利用青蛙的跳跃运动机理,对应用于仿青蛙跳跃机器人的机构模型 进行分析,最终将上述理论分析基础应用于实际设计中,并利用机构的仿真 来论证这种跳跃机理的实用性

哈尔滨工业大学工学硕士学位论文 第2章青蛙空间运动轨迹提取及分析 2.1引言 利用青蛙各个关节点随时间变化的三维坐标,可以得到青蛙运动姿态和 跳跃轨迹的变化规律,这些信息是运动机理分析的基础,如何获取这些数据 是研究中的一项不可缺少的技术。针对青蛙运动轨迹难以获得的问题,本章 提出一种空间运动轨迹提取方法,仅采用一台高速摄像机获取生物运动轨迹 的三维信息,并对此方法的正确性进行了实验验证,在此基础上,分析了该 方法在生物运动轨迹获取时的误差。编制了运动轨迹提取程序,简化了数据 处理的过程。最后通过实验验证了该方法的有效性,并获取了青蛙跳跃时的 运动信息。 2.2青蛙运动轨迹提取方法 为了收集青蛙跳跃过程中的运动信息,提出这种简易青蛙运动轨迹的提 取方法。这种方案的主要特点是需要的设备比较少,仅需要一台高速摄像机 即可提取出三维的信息,操作起来也比较方便。 2.2.1轨迹提取系统的建立 提取生物跳跃运动轨迹的三维信息,关键在于提取出各个时刻生物关节 点的三维信息,利用获得的各时刻关节点坐标,即可反映出运动轨迹的信息。 为提取关节点的三维信息,建立如图2-1所示系统,由一台高速摄像机、 一块平面镜、一个三轴坐标系标尺及需观察的研究对象组成。其中标尺上为 三维的笛卡尔坐标,标尺的竖直三角行部分为竖直向上的y坐标轴和水平向右 的x坐标轴,标尺的水平矩形部分标示出与x坐标轴和y坐标轴相垂直的并用右 手坐标系确定的z坐标轴,各坐标轴上均标有刻度。 实验布置的右视图如图2-2所示,镜面与地面之间的夹角为45度,镜 中成的像即为研究对象运动的俯视图,因此,利用一台摄像机即可同时捕捉 到研究对象运动的俯视图和前视图,从而利用这两个视图的信息,可得出研 究对象关节点的三维坐标。图中Lb、Ln、Lh、Lh、H,各数据的具体含 10
哈尔滨工业大学工学硕士学位论文 10 第2章 青蛙空间运动轨迹提取及分析 2.1 引言 利用青蛙各个关节点随时间变化的三维坐标,可以得到青蛙运动姿态和 跳跃轨迹的变化规律,这些信息是运动机理分析的基础,如何获取这些数据 是研究中的一项不可缺少的技术。针对青蛙运动轨迹难以获得的问题,本章 提出一种空间运动轨迹提取方法,仅采用一台高速摄像机获取生物运动轨迹 的三维信息,并对此方法的正确性进行了实验验证,在此基础上,分析了该 方法在生物运动轨迹获取时的误差。编制了运动轨迹提取程序,简化了数据 处理的过程。最后通过实验验证了该方法的有效性,并获取了青蛙跳跃时的 运动信息。 2.2 青蛙运动轨迹提取方法 为了收集青蛙跳跃过程中的运动信息,提出这种简易青蛙运动轨迹的提 取方法。这种方案的主要特点是需要的设备比较少,仅需要一台高速摄像机 即可提取出三维的信息,操作起来也比较方便。 2.2.1 轨迹提取系统的建立 提取生物跳跃运动轨迹的三维信息,关键在于提取出各个时刻生物关节 点的三维信息,利用获得的各时刻关节点坐标,即可反映出运动轨迹的信息。 为提取关节点的三维信息,建立如 图 2-1 所示系统,由一台高速摄像机、 一块平面镜、一个三轴坐标系标尺及需观察的研究对象组成。其中标尺上为 三维的笛卡尔坐标,标尺的竖直三角行部分为竖直向上的y坐标轴和水平向右 的x坐标轴,标尺的水平矩形部分标示出与x坐标轴和y坐标轴相垂直的并用右 手坐标系确定的z坐标轴,各坐标轴上均标有刻度。 实验布置的右视图如 图 2-2 所示,镜面与地面之间的夹角为 45 度,镜 中成的像即为研究对象运动的俯视图,因此,利用一台摄像机即可同时捕捉 到研究对象运动的俯视图和前视图,从而利用这两个视图的信息,可得出研 究对象关节点的三维坐标。图中 Lobv 、 Lrv 、 Lobh、 Lrh、 H ,各数据的具体含
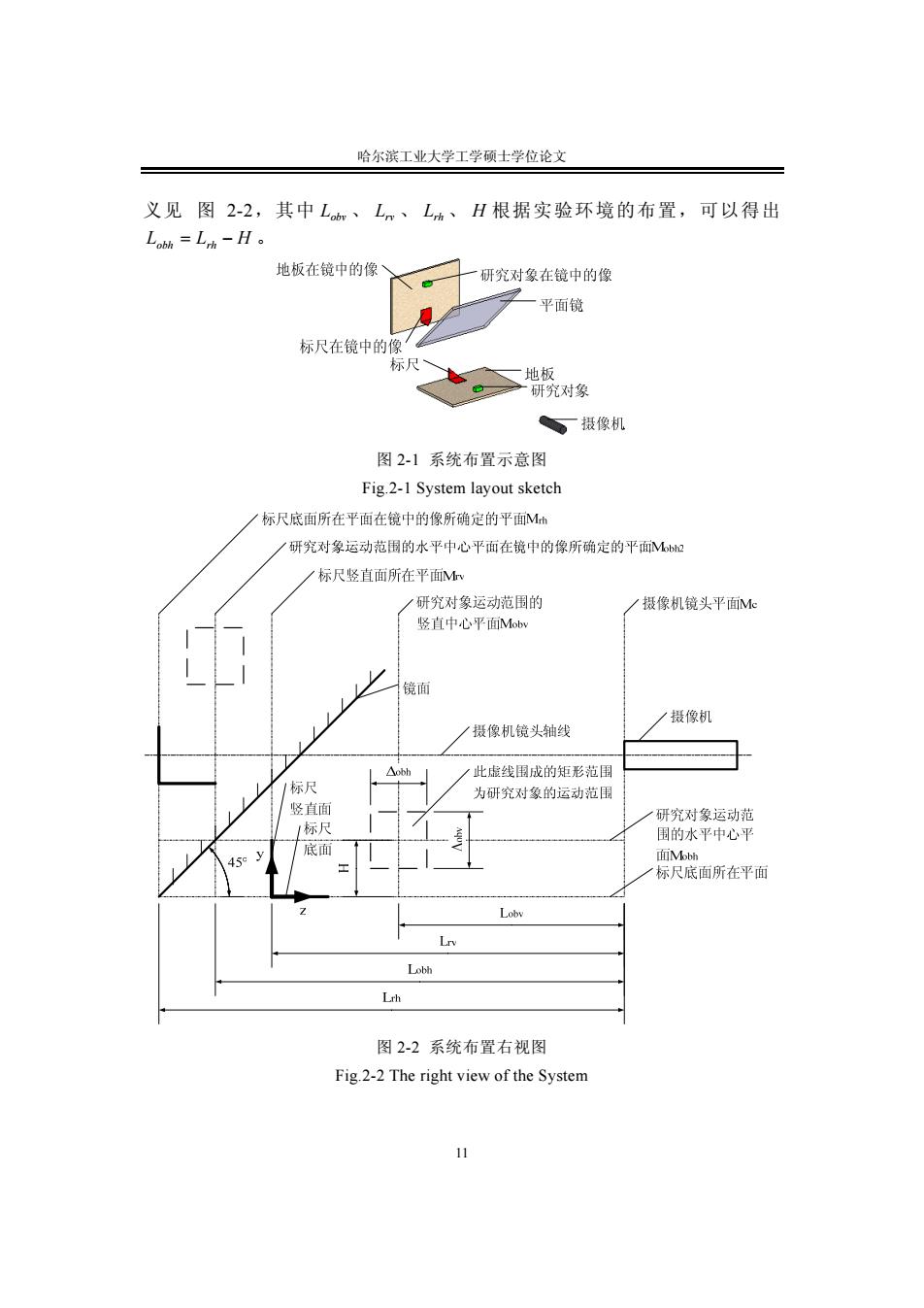
哈尔滨工业大学工学硕士学位论文 义见图2-2,其中L、Ln、Lh、H根据实验环境的布置,可以得出 Lobh=Lh-H。 地板在镜中的像 研究对象在镜中的像 平面镜 标尺在镜中的 标尺 地 研究对象 摄像机 图2-1系统布置示意图 Fig.2-1 System layout sketch 标尺底面所在平面在镜中的像所确定的平Mh 研究对象运动范围的水平中心平面在镜中的像所确定的平面Mb加 标尺竖直面所在平面Mv 研究对象运动范围的 摄像机镜头平面Me 竖直中心平面Mobv 镜面 摄像机 摄像机镜头轴线 △obh 此虚线围成的矩形范围 标尺 为研究对象的运动范围 竖直面 “研究对象运动范 /标尺 围的水平中心平 底面 45 面obM 标尺底面所在平面 Lrv Lobh Lrh 图2-2系统布置右视图 Fig.2-2 The right view of the System 11
哈尔滨工业大学工学硕士学位论文 11 义见 图 2-2,其中 Lobv 、 Lrv 、 Lrh 、 H 根据实验环境的布置,可以得出 Lobh = Lrh − H 。 图 2-1 系统布置示意图 Fig.2-1 System layout sketch 图 2-2 系统布置右视图 Fig.2-2 The right view of the System

哈尔滨工业大学工学硕士学位论文 2.2.2青蛙关节点的提取 基于上述实验平台获取的图像信息及相关数据,通过如下处理可获得青 蛙关节点的三维坐标。分为两个步骤:()利用图像求解研究对象关节点在图 像中各个坐标轴上的投影:(b)进行透视效果的修正(由于摄像机是基于小孔 成像原理进行图像录制的,因此需要对透视效果的影响进行修正)。 2.2.2.1关节点在图像中各个坐标轴上投影由上述实验安排,摄像机采集出 的图像的示意图如图2-3所示(仅取研究对象上一个关节点进行分析)。其 中点A为标尺竖直面上的原点,AA为标尺上的x轴,A,A为标尺上的y轴: A4A,在标尺底面上,为标尺上的z轴。由于标尺有刻度,故A42、AA、AA 的实际长度已知。研究对象欲被分析的关节点在前视图中的为点A。,在镜中 的像(即在俯视图中的点)为点A,。 镜面部分 + + 摄像机采集的图像 图2-3摄像机拍摄的图像的示意图 Fig.2-3 The sketch of the image shot by a camera 下面求解关节点在各个坐标轴上的投影。首先求解关节点在x、y、z轴 中某一轴上的投影。 令欲求维度的坐标值为x(x坐标,y坐标或z坐标),相应维度的坐 标轴起点为P(,)、终点为P(:,乃),目标关节点为P(:2,y2),坐标轴起 点与终点之间的实际长度为L: 当x0=x时,xa由式(2-1)确定。 (y2-yo)Lsa (2-1) y1-Yo 当y。=乃时,x由式(2-2)确定。 12
哈尔滨工业大学工学硕士学位论文 12 2.2.2 青蛙关节点的提取 基于上述实验平台获取的图像信息及相关数据,通过如下处理可获得青 蛙关节点的三维坐标。分为两个步骤:(a)利用图像求解研究对象关节点在图 像中各个坐标轴上的投影;(b)进行透视效果的修正(由于摄像机是基于小孔 成像原理进行图像录制的,因此需要对透视效果的影响进行修正)。 2.2.2.1 关节点在图像中各个坐标轴上投影 由上述实验安排,摄像机采集出 的图像的示意图如 图 2-3 所示(仅取研究对象上一个关节点进行分析)。其 中点 A1为标尺竖直面上的原点, A1A2 为标尺上的x轴, A1A3为标尺上的y轴; A4A5 在标尺底面上,为标尺上的z轴。由于标尺有刻度,故 A1A2 、A1A3、A4A5 的实际长度已知。研究对象欲被分析的关节点在前视图中的为点 A6 ,在镜中 的像(即在俯视图中的点)为点 A7 。 图 2-3 摄像机拍摄的图像的示意图 Fig.2-3 The sketch of the image shot by a camera 下面求解关节点在各个坐标轴上的投影。首先求解关节点在 x、y、z 轴 中某一轴上的投影。 令欲求维度的坐标值为 target x (x 坐标,y 坐标或 z 坐标),相应维度的坐 标轴起点为 ( ) 0 0 0 P x , y 、终点为 ( ) 1 1 1 P x , y ,目标关节点为 ( ) 2 2 2 P x , y ,坐标轴起 点与终点之间的实际长度为 Lfact ; 当 0 1 x = x 时, target x 由式(2-1)确定。 ( ) 0 2 0 fact target y y y y L x − − = 1 (2-1) 当 0 1 y = y 时, target x 由式(2-2)确定