
哈尔滨工业大学工学硕士学位论文 构。 (⑤)微传感和微驱动问题微型仿生机器人有些己不是传统常规机器人 的按比例缩小,它的开发涉及到电磁、机械、热、光、化学和生物等多学科。 对于微型仿生机器人的制造,需要解决一些工程上的问题。如动力源、驱动 方式、传感集成控制以及同外界的通讯等,实现微传感和微驱动的一个关键 技术是机电光一体结合的微加工技术。同时,在设计时必须考虑到尺寸效应、 新材料、新工艺等问题。 此外,还有能量代谢效率和仿生材料优化方面的问题。 1.3弹跳机器人的研究综述 1.3.1弹跳机器人的研究现状 弹跳机器人的优秀的越障能力很早就受到人们的关注。早在1969年美国 就有人研制弹跳机构以用于月球探索)。根据当时“阿波罗”号飞船登月时 的数据以及后期的试验与计算,列出了在月球上三种运动方式的比较(如 表1-1所示)。可见,弹跳机在星际探索中是一种非常高效的方式。由于弹 跳运动的突然性与爆发性有助于机器人躲避危险,所以随着近期反恐活动和 战场侦察的需要,国外许多研究机构又开始从事微小弹跳机构的研究,并陆 续研究出一些原型实验机。 表1-1三种运动方式比较2) Table 1-1 The comparison of three different movement type 运动方式 活动距离(km) 重量(kg) 有效载荷(kg) 持续性 弹跳机 30 450 3小时 喷气式 7 205 7 131kg推进燃料的消耗时间 漫游小车 17 1750 更大 数小时 麻省理工大学腿实验室的Raiberta教授在1984年设计了一个单腿机器人, 这是世界上第一个以跳跃方式运动的机器人,机器人的运动被限制在一个平 面内,腿部装有汽缸,作用相当于弹簧,因此它在地面上的运动类似于一个 带弹簧的倒立摆2-l4l。目前跳跃机构的理论分析多继承Raibert的气体推动模 型,分析阐述种种非线性动力学现象,并应用了很多非线性动力学分析工具。 基本模型如图1-1所示,机构有一个X方向的平移自由度以及足部和躯体之 间的旋转自由度,其跳跃与落地过程经过运动学与动力学分析与计算后,只
哈尔滨工业大学工学硕士学位论文 3 构。 (5) 微传感和微驱动问题 微型仿生机器人有些己不是传统常规机器人 的按比例缩小,它的开发涉及到电磁、机械、热、光、化学和生物等多学科。 对于微型仿生机器人的制造,需要解决一些工程上的问题。如动力源、驱动 方式、传感集成控制以及同外界的通讯等,实现微传感和微驱动的一个关键 技术是机电光一体结合的微加工技术。同时,在设计时必须考虑到尺寸效应、 新材料、新工艺等问题。 此外,还有能量代谢效率和仿生材料优化方面的问题。 1.3 弹跳机器人的研究综述 1.3.1 弹跳机器人的研究现状 弹跳机器人的优秀的越障能力很早就受到人们的关注。早在 1969 年美国 就有人研制弹跳机构以用于月球探索[11]。根据当时“阿波罗”号飞船登月时 的数据以及后期的试验与计算,列出了在月球上三种运动方式的比较(如 表 1-1 所示)。可见,弹跳机在星际探索中是一种非常高效的方式。由于弹 跳运动的突然性与爆发性有助于机器人躲避危险,所以随着近期反恐活动和 战场侦察的需要,国外许多研究机构又开始从事微小弹跳机构的研究,并陆 续研究出一些原型实验机。 表 1-1 三种运动方式比较[2] Table 1-1 The comparison of three different movement type 运动方式 活动距离(km) 重量(kg) 有效载荷(kg) 持续性 弹跳机 30 450 7 3 小时 喷气式 7 205 7 131kg 推进燃料的消耗时间 漫游小车 17 1750 更大 数小时 麻省理工大学腿实验室的Raibert教授在 1984 年设计了一个单腿机器人, 这是世界上第一个以跳跃方式运动的机器人,机器人的运动被限制在一个平 面内,腿部装有汽缸,作用相当于弹簧,因此它在地面上的运动类似于一个 带弹簧的倒立摆[12~14]。目前跳跃机构的理论分析多继承Raibert的气体推动模 型,分析阐述种种非线性动力学现象,并应用了很多非线性动力学分析工具。 基本模型如 图 1-1 所示,机构有一个X方向的平移自由度以及足部和躯体之 间的旋转自由度,其跳跃与落地过程经过运动学与动力学分析与计算后,只
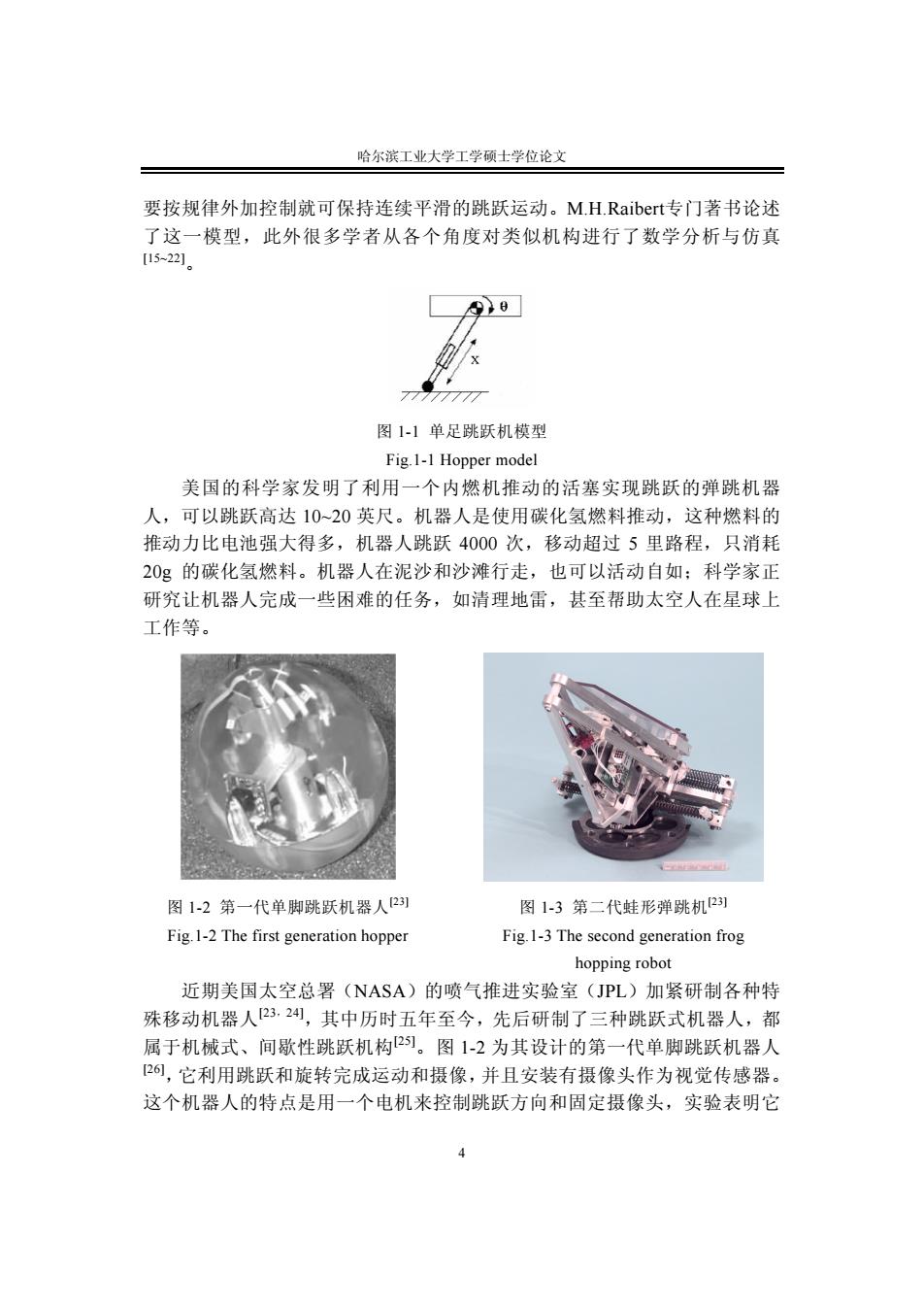
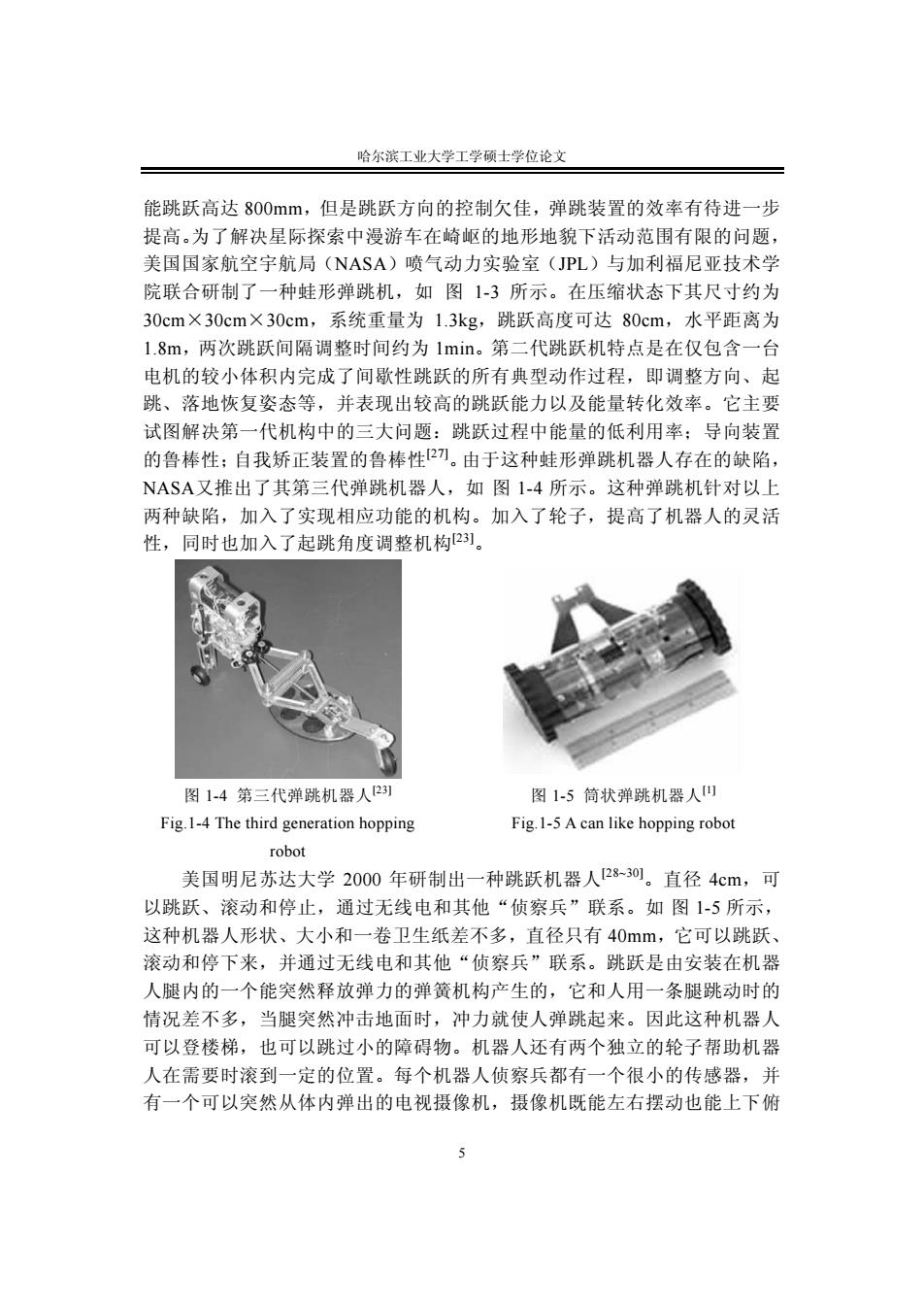
哈尔滨工业大学工学硕士学位论文 要按规律外加控制就可保持连续平滑的跳跃运动。MH.Raibert专门著书论述 了这一模型,此外很多学者从各个角度对类似机构进行了数学分析与仿真 [15-22]。 图1-1单足跳跃机模型 Fig.1-1 Hopper model 美国的科学家发明了利用一个内燃机推动的活塞实现跳跃的弹跳机器 人,可以跳跃高达10~20英尺。机器人是使用碳化氢燃料推动,这种燃料的 推动力比电池强大得多,机器人跳跃4000次,移动超过5里路程,只消耗 20g的碳化氢燃料。机器人在泥沙和沙滩行走,也可以活动自如:科学家正 研究让机器人完成一些困难的任务,如清理地雷,甚至帮助太空人在星球上 工作等。 图1-2第一代单脚跳跃机器人2) 图1-3第二代蛙形弹跳机2) Fig.1-2 The first generation hopper Fig.1-3 The second generation frog hopping robot 近期美国太空总署(NASA)的喷气推进实验室(JPL)加紧研制各种特 殊移动机器人23.2斗,其中历时五年至今,先后研制了三种跳跃式机器人,都 属于机械式、间歇性跳跃机构2]。图1-2为其设计的第一代单脚跳跃机器人 [2,它利用跳跃和旋转完成运动和摄像,并且安装有摄像头作为视觉传感器。 这个机器人的特点是用一个电机来控制跳跃方向和固定摄像头,实验表明它
哈尔滨工业大学工学硕士学位论文 4 要按规律外加控制就可保持连续平滑的跳跃运动。M.H.Raibert专门著书论述 了这一模型,此外很多学者从各个角度对类似机构进行了数学分析与仿真 [15~22]。 图 1-1 单足跳跃机模型 Fig.1-1 Hopper model 美国的科学家发明了利用一个内燃机推动的活塞实现跳跃的弹跳机器 人,可以跳跃高达 10~20 英尺。机器人是使用碳化氢燃料推动,这种燃料的 推动力比电池强大得多,机器人跳跃 4000 次,移动超过 5 里路程,只消耗 20g 的碳化氢燃料。机器人在泥沙和沙滩行走,也可以活动自如;科学家正 研究让机器人完成一些困难的任务,如清理地雷,甚至帮助太空人在星球上 工作等。 图 1-2 第一代单脚跳跃机器人[23] Fig.1-2 The first generation hopper 图 1-3 第二代蛙形弹跳机[23] Fig.1-3 The second generation frog hopping robot 近期美国太空总署(NASA)的喷气推进实验室(JPL)加紧研制各种特 殊移动机器人[23,24],其中历时五年至今,先后研制了三种跳跃式机器人,都 属于机械式、间歇性跳跃机构[25]。图 1-2 为其设计的第一代单脚跳跃机器人 [26],它利用跳跃和旋转完成运动和摄像,并且安装有摄像头作为视觉传感器。 这个机器人的特点是用一个电机来控制跳跃方向和固定摄像头,实验表明它
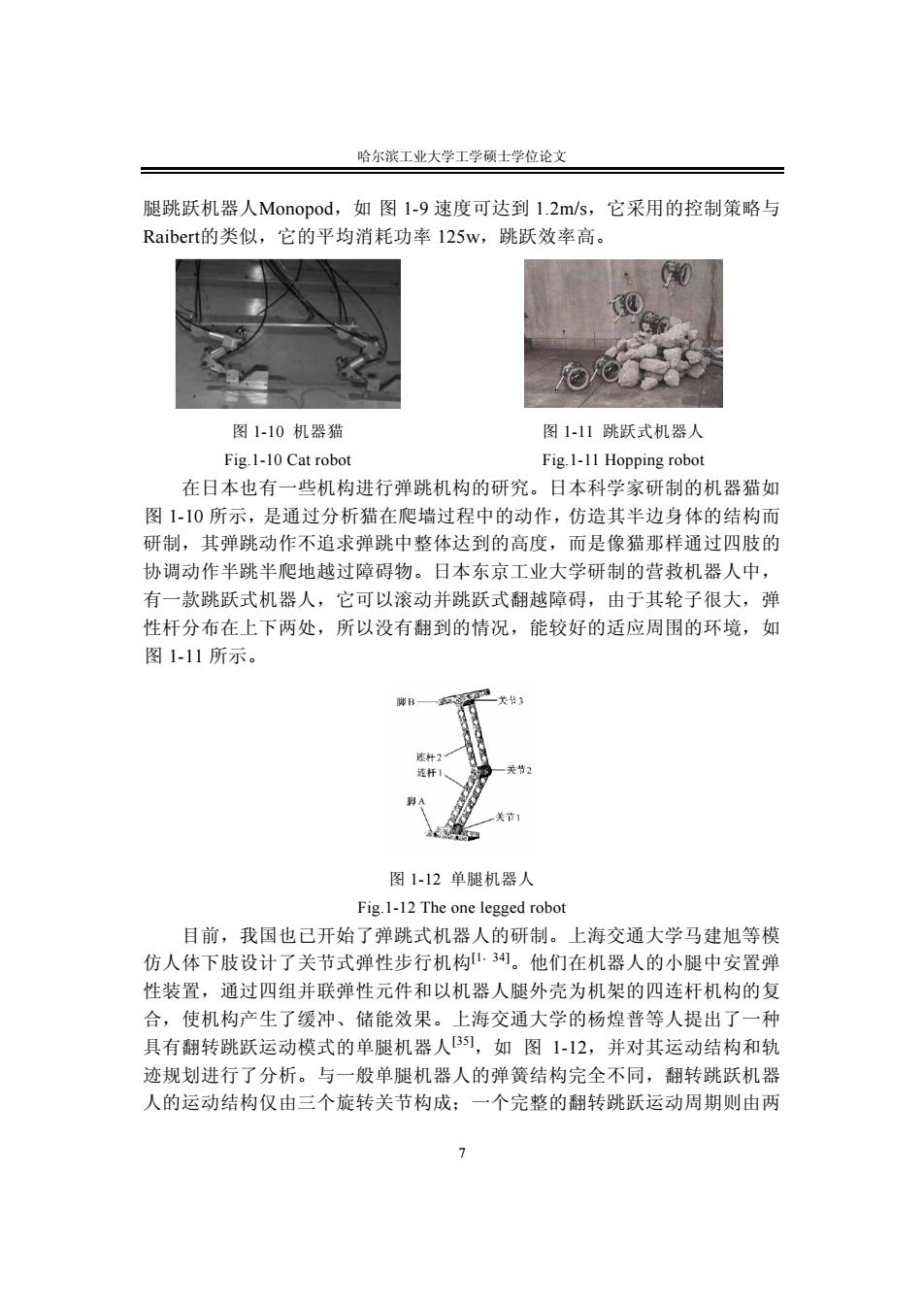
哈尔滨工业大学工学硕士学位论文 能跳跃高达800mm,但是跳跃方向的控制欠佳,弹跳装置的效率有待进一步 提高。为了解决星际探索中漫游车在崎岖的地形地貌下活动范围有限的问题, 美国国家航空宇航局(NASA)喷气动力实验室(JPL)与加利福尼亚技术学 院联合研制了一种蛙形弹跳机,如图1-3所示。在压缩状态下其尺寸约为 30cm×30cm×30cm,系统重量为1.3kg,跳跃高度可达80cm,水平距离为 1.8m,两次跳跃间隔调整时间约为1min。第二代跳跃机特点是在仅包含一台 电机的较小体积内完成了间歇性跳跃的所有典型动作过程,即调整方向、起 跳、落地恢复姿态等,并表现出较高的跳跃能力以及能量转化效率。它主要 试图解决第一代机构中的三大问题:跳跃过程中能量的低利用率:导向装置 的鲁棒性:自我矫正装置的鲁棒性2刀。由于这种蛙形弹跳机器人存在的缺陷, NASA又推出了其第三代弹跳机器人,如图1-4所示。这种弹跳机针对以上 两种缺陷,加入了实现相应功能的机构。加入了轮子,提高了机器人的灵活 性,同时也加入了起跳角度调整机构2) 图1-4第三代弹跳机器人2) 图1-5筒状弹跳机器人山 Fig.1-4 The third generation hopping Fig.1-5 A can like hopping robot robot 美国明尼苏达大学2000年研制出一种跳跃机器人28-30。直径4cm,可 以跳跃、滚动和停止,通过无线电和其他“侦察兵”联系。如图1-5所示, 这种机器人形状、大小和一卷卫生纸差不多,直径只有40mm,它可以跳跃、 滚动和停下来,并通过无线电和其他“侦察兵”联系。跳跃是由安装在机器 人腿内的一个能突然释放弹力的弹簧机构产生的,它和人用一条腿跳动时的 情况差不多,当腿突然冲击地面时,冲力就使人弹跳起来。因此这种机器人 可以登楼梯,也可以跳过小的障碍物。机器人还有两个独立的轮子帮助机器 人在需要时滚到一定的位置。每个机器人侦察兵都有一个很小的传感器,并 有一个可以突然从体内弹出的电视摄像机,摄像机既能左右摆动也能上下俯
哈尔滨工业大学工学硕士学位论文 5 能跳跃高达 800mm,但是跳跃方向的控制欠佳,弹跳装置的效率有待进一步 提高。为了解决星际探索中漫游车在崎岖的地形地貌下活动范围有限的问题, 美国国家航空宇航局(NASA)喷气动力实验室(JPL)与加利福尼亚技术学 院联合研制了一种蛙形弹跳机,如 图 1-3 所示。在压缩状态下其尺寸约为 30cm×30cm×30cm,系统重量为 1.3kg,跳跃高度可达 80cm,水平距离为 1.8m,两次跳跃间隔调整时间约为 1min。第二代跳跃机特点是在仅包含一台 电机的较小体积内完成了间歇性跳跃的所有典型动作过程,即调整方向、起 跳、落地恢复姿态等,并表现出较高的跳跃能力以及能量转化效率。它主要 试图解决第一代机构中的三大问题:跳跃过程中能量的低利用率;导向装置 的鲁棒性;自我矫正装置的鲁棒性[27]。由于这种蛙形弹跳机器人存在的缺陷, NASA又推出了其第三代弹跳机器人,如 图 1-4 所示。这种弹跳机针对以上 两种缺陷,加入了实现相应功能的机构。加入了轮子,提高了机器人的灵活 性,同时也加入了起跳角度调整机构[23]。 图 1-4 第三代弹跳机器人[23] Fig.1-4 The third generation hopping robot 图 1-5 筒状弹跳机器人[1] Fig.1-5 A can like hopping robot 美国明尼苏达大学 2000 年研制出一种跳跃机器人[28~30]。直径 4cm,可 以跳跃、滚动和停止,通过无线电和其他“侦察兵”联系。如 图 1-5 所示, 这种机器人形状、大小和一卷卫生纸差不多,直径只有 40mm,它可以跳跃、 滚动和停下来,并通过无线电和其他“侦察兵”联系。跳跃是由安装在机器 人腿内的一个能突然释放弹力的弹簧机构产生的,它和人用一条腿跳动时的 情况差不多,当腿突然冲击地面时,冲力就使人弹跳起来。因此这种机器人 可以登楼梯,也可以跳过小的障碍物。机器人还有两个独立的轮子帮助机器 人在需要时滚到一定的位置。每个机器人侦察兵都有一个很小的传感器,并 有一个可以突然从体内弹出的电视摄像机,摄像机既能左右摆动也能上下俯

哈尔滨工业大学工学硕士学位论文 仰,因此可以拍摄周围的全景:另一些侦察兵还配备有小的振动器和麦克风。 这种机器人可用于城市战争或帮助警察挫败处于包围之中的劫持人质的恐怖 分子。 Case Western Reserve University研究人员研制出由人工筋驱动的机械蟋 蟀B1,32,如图1-6。机械蟋蟀的腿部是由高分子管状纤维编织成的人工筋, 纤维内部通过微型空气压缩机充气。微控制器控制腿部微型阀门及空气压缩 机,使人工筋做出绷紧与收缩动作,驱动机械蟋蟀行走与弹跳。 图1-6小型机械蟋蟀 图1-7机器狗 Fig.1-6 A cricket micro robot Fig.1-7 Dog robot 仿生机器狗(图1-7),是基于仿生学思想,提出一种简化的狗后腿模 型,并设计的机器人,在跳跃时能储存能量,落地吸收冲击。它有关节形结 构腿,用两个液压驱动作为肌肉,用弹簧作为腱,弹簧的作用就像腓肠肌或 是跖肌,靠膝关节传递的能量使机器人向前运动。即使踝关节没有驱动器, 也可以控制它在平面上进行跳跃运动。 图1-8弓形单足弹跳机器人 图1-9 Monopod Fig.1-8 A bow leg hopping robot Fig.1-9 Monopod 当前除美国外很多国家也进行着弹跳机器人的研究。卡耐基梅隆大学与 瑞士联邦技术学院的Jean Christophe Zufferey等人研制了一种单足跳跃机构 [B),如图1-8所示。通过电机与滑轮装置拉紧绳索,使弹性杆收缩,跳跃时 通过触发装置瞬间释放绳索,弹性杆弹开质量块推动机构跃起。加拿大的单 6
哈尔滨工业大学工学硕士学位论文 6 仰,因此可以拍摄周围的全景;另一些侦察兵还配备有小的振动器和麦克风。 这种机器人可用于城市战争或帮助警察挫败处于包围之中的劫持人质的恐怖 分子。 Case Western Reserve University研究人员研制出由人工筋驱动的机械蟋 蟀[31,32],如 图 1-6。机械蟋蟀的腿部是由高分子管状纤维编织成的人工筋, 纤维内部通过微型空气压缩机充气。微控制器控制腿部微型阀门及空气压缩 机,使人工筋做出绷紧与收缩动作,驱动机械蟋蟀行走与弹跳。 图 1-6 小型机械蟋蟀 Fig.1-6 A cricket micro robot 图 1-7 机器狗 Fig.1-7 Dog robot 仿生机器狗(图 1-7),是基于仿生学思想,提出一种简化的狗后腿模 型,并设计的机器人,在跳跃时能储存能量,落地吸收冲击。它有关节形结 构腿,用两个液压驱动作为肌肉,用弹簧作为腱,弹簧的作用就像腓肠肌或 是跖肌,靠膝关节传递的能量使机器人向前运动。即使踝关节没有驱动器, 也可以控制它在平面上进行跳跃运动。 图 1-8 弓形单足弹跳机器人 Fig.1-8 A bow leg hopping robot 图 1-9 Monopod Fig.1-9 Monopod 当前除美国外很多国家也进行着弹跳机器人的研究。卡耐基梅隆大学与 瑞士联邦技术学院的Jean Christophe Zufferey等人研制了一种单足跳跃机构 [33],如 图 1-8 所示。通过电机与滑轮装置拉紧绳索,使弹性杆收缩,跳跃时 通过触发装置瞬间释放绳索,弹性杆弹开质量块推动机构跃起。加拿大的单
哈尔滨工业大学工学硕士学位论文 腿跳跃机器人Monopod,如图1-9速度可达到1.2m/s,它采用的控制策略与 Raibert的类似,它的平均消耗功率125w,跳跃效率高。 图1-10机器猫 图1-11跳跃式机器人 Fig.1-10 Cat robot Fig.1-11 Hopping robot 在日本也有一些机构进行弹跳机构的研究。日本科学家研制的机器猫如 图1-10所示,是通过分析猫在爬墙过程中的动作,仿造其半边身体的结构而 研制,其弹跳动作不追求弹跳中整体达到的高度,而是像猫那样通过四肢的 协调动作半跳半爬地越过障碍物。日本东京工业大学研制的营救机器人中, 有一款跳跃式机器人,它可以滚动并跳跃式翻越障碍,由于其轮子很大,弹 性杆分布在上下两处,所以没有翻到的情况,能较好的适应周围的环境,如 图1-11所示。 B 连杆 图1-12单腿机器人 Fig.1-12 The one legged robot 目前,我国也己开始了弹跳式机器人的研制。上海交通大学马建旭等模 仿人体下肢设计了关节式弹性步行机构,34。他们在机器人的小腿中安置弹 性装置,通过四组并联弹性元件和以机器人腿外壳为机架的四连杆机构的复 合,使机构产生了缓冲、储能效果。上海交通大学的杨煌普等人提出了一种 具有翻转跳跃运动模式的单腿机器人B],如图1-12,并对其运动结构和轨 迹规划进行了分析。与一般单腿机器人的弹簧结构完全不同,翻转跳跃机器 人的运动结构仅由三个旋转关节构成;一个完整的翻转跳跃运动周期则由两
哈尔滨工业大学工学硕士学位论文 7 腿跳跃机器人Monopod,如 图 1-9 速度可达到 1.2m/s,它采用的控制策略与 Raibert的类似,它的平均消耗功率 125w,跳跃效率高。 图 1-10 机器猫 Fig.1-10 Cat robot 图 1-11 跳跃式机器人 Fig.1-11 Hopping robot 在日本也有一些机构进行弹跳机构的研究。日本科学家研制的机器猫如 图 1-10 所示,是通过分析猫在爬墙过程中的动作,仿造其半边身体的结构而 研制,其弹跳动作不追求弹跳中整体达到的高度,而是像猫那样通过四肢的 协调动作半跳半爬地越过障碍物。日本东京工业大学研制的营救机器人中, 有一款跳跃式机器人,它可以滚动并跳跃式翻越障碍,由于其轮子很大,弹 性杆分布在上下两处,所以没有翻到的情况,能较好的适应周围的环境,如 图 1-11 所示。 图 1-12 单腿机器人 Fig.1-12 The one legged robot 目前,我国也已开始了弹跳式机器人的研制。上海交通大学马建旭等模 仿人体下肢设计了关节式弹性步行机构[1,34]。他们在机器人的小腿中安置弹 性装置,通过四组并联弹性元件和以机器人腿外壳为机架的四连杆机构的复 合,使机构产生了缓冲、储能效果。上海交通大学的杨煌普等人提出了一种 具有翻转跳跃运动模式的单腿机器人[35],如 图 1-12,并对其运动结构和轨 迹规划进行了分析。与一般单腿机器人的弹簧结构完全不同,翻转跳跃机器 人的运动结构仅由三个旋转关节构成;一个完整的翻转跳跃运动周期则由两