
南昌航空大学硕士学位论文 第一章绪论 (⑤)“机械蝴蝶”[17 “机械蝴蝶”由以色列航空工业公司的微型机器人实验室研制而成,它是一 款新型机器昆虫,如图1-5所示。“机械蝴蝶”翼展20cm,重12g,它的机载设 备有发动机、传感器、通讯系统及转向系统,它可以模拟蝴蝶上下拍动翅膀推动 其前进。 图1-5机械蝴蝶 1.2.2国内研究现状 与国外相比,国内在仿生微型扑翼飞行器的研究方面起步较晚。由于微型扑 翼飞行器应用前景广泛、使用价值高,微型扑翼飞行器的研究在国内也成为了热 门话题。在国内,主要有西北工业大学、南京航空航天大学、北京航空航天大学、 清华大学等机构正在进行有关仿生微型扑翼飞行器方面的研究,虽然取得了一些 成果,但与国外相比还是有一定的差距。 由南京航空航天大学昂海松8,1判指导,设计制作的“黄莺”微小型可控扑翼 飞行器,如图1-6所示。翼展为24cm,重量为38g,能在空中飞行6min,飞行 高度可达50m,可遥控飞行的航程达2000m,由自行研制的重量不到1g的超微 型无芯舵机控制。具有噪声小、飞行稳定、控制灵活等优点。 西北工业大学的方宗德20,21,2等人,以鸟类的飞行参数为基础进行统计分 析,拟合出了仿鸟扑翼飞行的公式,并根据这些公式对仿生微扑翼飞行进行了初 步设计,最后制作出了仿鸟微扑翼飞行器样机,如图1-7所示。全机重约16.5g, 翼展230mm,扑翼频率10.5Hz,可自由飞行15~21s。该机的驱动机构采用的是 聚合物锂电池和微型直流电动机驱动,它的机架采用的是碳纤维,机翼采用的是 聚酯薄膜柔性机翼
南昌航空大学硕士学位论文 第一章 绪 论 5 (5) “机械蝴蝶”[17] “机械蝴蝶”由以色列航空工业公司的微型机器人实验室研制而成,它是一 款新型机器昆虫,如图 1-5 所示。“机械蝴蝶”翼展 20cm,重 12g,它的机载设 备有发动机、传感器、通讯系统及转向系统,它可以模拟蝴蝶上下拍动翅膀推动 其前进。 图 1-5 机械蝴蝶 1.2.2 国内研究现状 与国外相比,国内在仿生微型扑翼飞行器的研究方面起步较晚。由于微型扑 翼飞行器应用前景广泛、使用价值高,微型扑翼飞行器的研究在国内也成为了热 门话题。在国内,主要有西北工业大学、南京航空航天大学、北京航空航天大学、 清华大学等机构正在进行有关仿生微型扑翼飞行器方面的研究,虽然取得了一些 成果,但与国外相比还是有一定的差距。 由南京航空航天大学昂海松[18,19] 指导,设计制作的“黄莺”微小型可控扑翼 飞行器,如图 1-6 所示。翼展为 24cm,重量为 38g,能在空中飞行 6min,飞行 高度可达 50m,可遥控飞行的航程达 2000m,由自行研制的重量不到 1g 的超微 型无芯舵机控制。具有噪声小、飞行稳定、控制灵活等优点。 西北工业大学的方宗德[20,21,22] 等人,以鸟类的飞行参数为基础进行统计分 析,拟合出了仿鸟扑翼飞行的公式,并根据这些公式对仿生微扑翼飞行进行了初 步设计,最后制作出了仿鸟微扑翼飞行器样机,如图 1-7 所示。全机重约 16.5g, 翼展 230mm,扑翼频率 10.5Hz,可自由飞行 15~21s。该机的驱动机构采用的是 聚合物锂电池和微型直流电动机驱动,它的机架采用的是碳纤维,机翼采用的是 聚酯薄膜柔性机翼
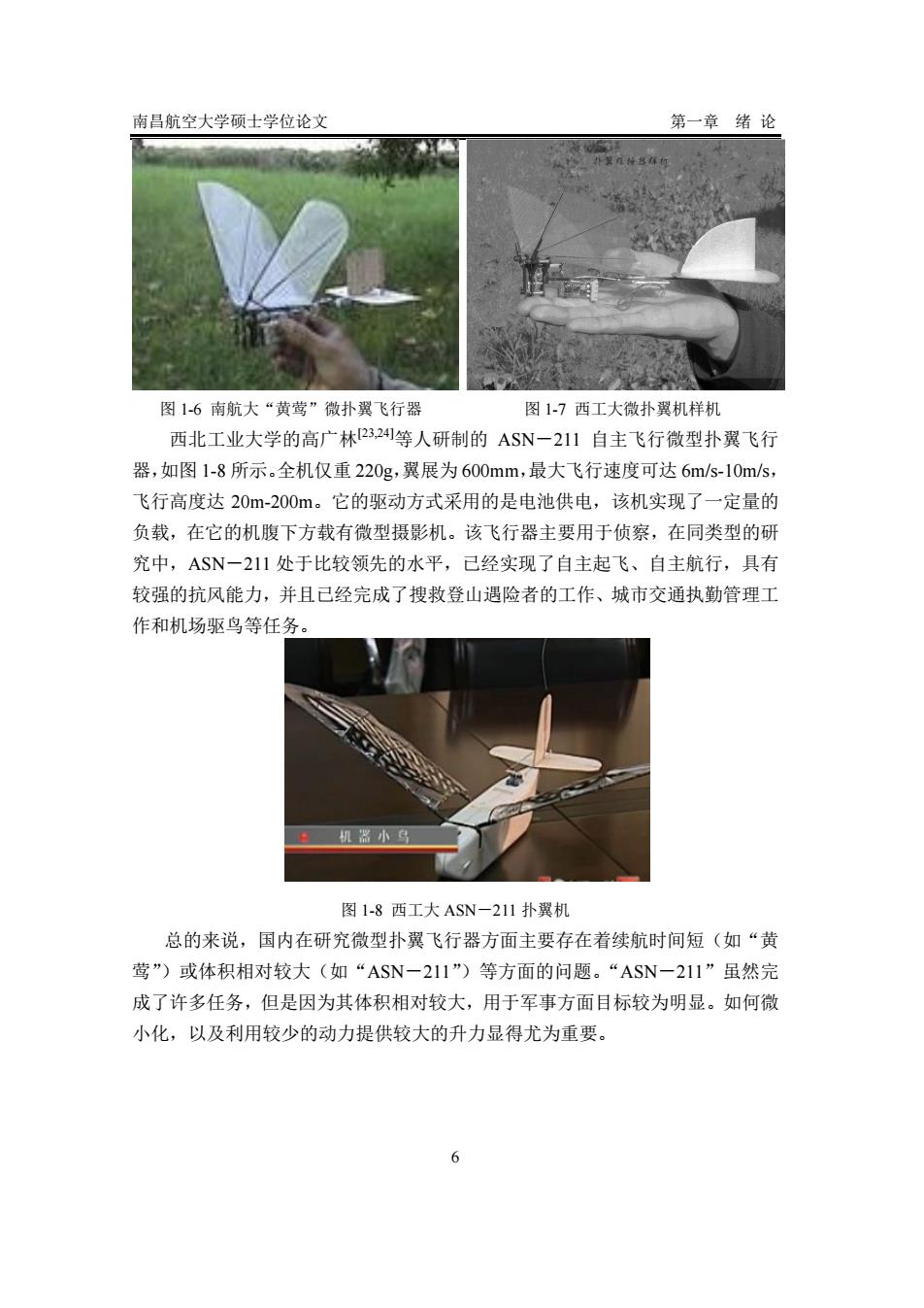
南昌航空大学硕士学位论文 第一章绪论 图1-6南航大“黄莺”微扑翼飞行器 图1-7西工大微扑翼机样机 西北工业大学的高广林23,24等人研制的ASN一211自主飞行微型扑翼飞行 器,如图1-8所示。全机仅重220g,翼展为600mm,最大飞行速度可达6m/s-10m/s, 飞行高度达20m-200m。它的驱动方式采用的是电池供电,该机实现了一定量的 负载,在它的机腹下方载有微型摄影机。该飞行器主要用于侦察,在同类型的研 究中,ASN一211处于比较领先的水平,己经实现了自主起飞、自主航行,具有 较强的抗风能力,并且己经完成了搜救登山遇险者的工作、城市交通执勤管理工 作和机场驱鸟等任务。 。机器小乌 图1-8西工大ASN-211扑翼机 总的来说,国内在研究微型扑翼飞行器方面主要存在着续航时间短(如“黄 莺”)或体积相对较大(如“ASN一211”)等方面的问题。“ASN一211”虽然完 成了许多任务,但是因为其体积相对较大,用于军事方面目标较为明显。如何微 小化,以及利用较少的动力提供较大的升力显得尤为重要。 6
南昌航空大学硕士学位论文 第一章 绪 论 6 图 1-6 南航大“黄莺”微扑翼飞行器 图 1-7 西工大微扑翼机样机 西北工业大学的高广林[23,24] 等人研制的 ASN-211 自主飞行微型扑翼飞行 器,如图 1-8 所示。全机仅重 220g,翼展为 600mm,最大飞行速度可达 6m/s-10m/s, 飞行高度达 20m-200m。它的驱动方式采用的是电池供电,该机实现了一定量的 负载,在它的机腹下方载有微型摄影机。该飞行器主要用于侦察,在同类型的研 究中,ASN-211 处于比较领先的水平,已经实现了自主起飞、自主航行,具有 较强的抗风能力,并且已经完成了搜救登山遇险者的工作、城市交通执勤管理工 作和机场驱鸟等任务。 图 1-8 西工大 ASN-211 扑翼机 总的来说,国内在研究微型扑翼飞行器方面主要存在着续航时间短(如“黄 莺”)或体积相对较大(如“ASN-211”)等方面的问题。“ASN-211”虽然完 成了许多任务,但是因为其体积相对较大,用于军事方面目标较为明显。如何微 小化,以及利用较少的动力提供较大的升力显得尤为重要

南昌航空大学硕士学位论文 第一章绪论 1.3本文的研究目的及意义 1.3.1微型扑翼飞行器的研究目的 微型扑翼飞行器的研究是一项高、精、尖,且涉及学科较多的研究项目,包 括:空气动力学、材料学、微机械电子系统、新型传感器、新型通讯系统和信号 系统、微型制动器、微型高密度能源等2]。要成功地将其应用于实践,还需要克 服很多的困难。它是当前国内外研究的一个热点问题,其在国防、军事、民用领 域有着固定翼飞行器和旋翼飞行器无可比拟的优势。对微扑翼飞行器的研究不仅 可以推动各门学科领域技术的进一步发展,还能为我国在国防、军事、民用等领 域做出突出的贡献。 此课题的研究目的旨在借鉴前人研究的成果基础上,对凤蝶的气动外形特性 进行分析,对凤蝶的飞行机理进行重要的研究,并对相应尺寸的翼型进行建模、 气动流场计算等,确定翼型的选择和各尺寸参数在流体力学分析软件中可行后, 进行扑动机构的设计分析及运动仿真,为以后仿蝴蝶微扑翼飞行器的进一步发展 和实用化提供一些参考。 1.3.2拟解决的技术问题 在对微型扑翼飞行器的研制过程中,涉及到许多技术性的问题,本论文针对 在课题研究过程中遇到的部分技术问题进行分析与解决。 1、有关蝴蝶非定常空气动力学的飞行机理26,27,2: 微型飞行器在空气动力学特性方面与常规飞行器有很大程度的不同。常规飞 行器的雷诺数相对较高,其外形及气动力的设计已经趋于成熟,但是微型飞行器 的飞行时速较低,故其飞行雷诺数也较低,只有2×10左右。对于昆虫而言,其 翅膀运动的雷诺数更小,只有10~104,有的昆虫雷诺数甚至为10的量级。微型 扑翼飞行器主要利用了非定常气动力和高升力机制。由于其尺寸小,飞行速度低, 雷诺数小,因此不能用常规飞行器的定常流理论来对其进行研究和试验2,30,3别, 且有关蝴蝶的飞行机理的研究相对较少。本论文通过流体力学软件对仿蝴蝶翼型 周围的流场进行了模拟和数值计算,得出了有关其飞行机理的结论。 2、有关扑翼机构的设计分析与仿真B2,3: 7
南昌航空大学硕士学位论文 第一章 绪 论 7 1.3 本文的研究目的及意义 1.3.1 微型扑翼飞行器的研究目的 微型扑翼飞行器的研究是一项高、精、尖,且涉及学科较多的研究项目,包 括:空气动力学、材料学、微机械电子系统、新型传感器、新型通讯系统和信号 系统、微型制动器、微型高密度能源等[25] 。要成功地将其应用于实践,还需要克 服很多的困难。它是当前国内外研究的一个热点问题,其在国防、军事、民用领 域有着固定翼飞行器和旋翼飞行器无可比拟的优势。对微扑翼飞行器的研究不仅 可以推动各门学科领域技术的进一步发展,还能为我国在国防、军事、民用等领 域做出突出的贡献。 此课题的研究目的旨在借鉴前人研究的成果基础上,对凤蝶的气动外形特性 进行分析,对凤蝶的飞行机理进行重要的研究,并对相应尺寸的翼型进行建模、 气动流场计算等,确定翼型的选择和各尺寸参数在流体力学分析软件中可行后, 进行扑动机构的设计分析及运动仿真,为以后仿蝴蝶微扑翼飞行器的进一步发展 和实用化提供一些参考。 1.3.2 拟解决的技术问题 在对微型扑翼飞行器的研制过程中,涉及到许多技术性的问题,本论文针对 在课题研究过程中遇到的部分技术问题进行分析与解决。 1、有关蝴蝶非定常空气动力学的飞行机理[26,27,28] : 微型飞行器在空气动力学特性方面与常规飞行器有很大程度的不同。常规飞 行器的雷诺数相对较高,其外形及气动力的设计已经趋于成熟,但是微型飞行器 的飞行时速较低,故其飞行雷诺数也较低,只有 2×105 左右。对于昆虫而言,其 翅膀运动的雷诺数更小,只有 102 ~104 ,有的昆虫雷诺数甚至为 10 的量级。微型 扑翼飞行器主要利用了非定常气动力和高升力机制。由于其尺寸小,飞行速度低, 雷诺数小,因此不能用常规飞行器的定常流理论来对其进行研究和试验 [29,30,31] , 且有关蝴蝶的飞行机理的研究相对较少。本论文通过流体力学软件对仿蝴蝶翼型 周围的流场进行了模拟和数值计算,得出了有关其飞行机理的结论。 2、有关扑翼机构的设计分析与仿真 [32,33] :
南昌航空大学硕士学位论文 第一章绪论 目前一些文献资料中所设计的扑动机构有曲柄滑块机构,凸轮弹簧机构、单 曲柄双摇杆机构等,这些机构都存在一些问题,不是质量较重就是存在扑翼角差, 或者设计加工较为复杂。要设计出一种质量较轻、尺寸较小、且结构简单的扑翼 机构就显得特别重要了。本论文在以平面四杆机构的运动原理基础上,以解析法 设计急回特性的扑翼机构,这是一种新型的设计方法,设计出了一种齿轮减速装 置的曲柄摇杆扑翼机构,该机构在结构上和运动上左右完全对称并且制作简单, 运动分析和仿真结果可靠。 1.4本文的内容安排 本论文将在借鉴国内外已有的研究成果的基础上,对于自然界中蝴蝶的飞行 机理进行研究,借助于软件和三维测试仪器建立蝴蝶翼的动力学模型,用空气动 力学的理论对其进行动力学的计算,并进行初步的结构设计及机构分析,根据分 析结果建立模型并仿真试验。主要研究内容如下: 第1章:绪论,本章主要介绍了国内外微型扑翼飞行器的发展现状及研究背 景。它与传统的飞行器不同,涉及的研究领域非常复杂。 第2章:从昆虫的飞行方式及翅膀的扑动模式入手,分析了一些昆虫以及蝴 蝶的低雷诺数飞行机理,为仿生扑翼机的设计提供了理论依据。以凤蝶为例,对 翅翼的三维形态进行测量及形态结构研究,并对其运动进行分析,为建立仿蝴蝶 翼型及扑翼机构提供数据。 第3章:建立仿蝴蝶翼型的二维流场分析装置,用得到的尺寸参数和运动参 数建立翼型,在软件下数值模拟出翼型在不同状态下的空气动力学特性,进行动 力学仿真、测试,试验其可行性。 第4章:扑翼机构的设计与建模分析。本章介绍并比较了几种类型的扑翼机 构,在以平面四杆机构运动原理的基础上,以解析法设计急回特性的扑翼机构, 并对机构进行运动分析,接着根据运动分析结果在三维软件solidworks中建立了 扑翼机构的三维模型及仿真分析。 第5章:结论和展望,对本论文研究工作的总结,并对未来研究工作的展望。 8
南昌航空大学硕士学位论文 第一章 绪 论 8 目前一些文献资料中所设计的扑动机构有曲柄滑块机构,凸轮弹簧机构、单 曲柄双摇杆机构等,这些机构都存在一些问题,不是质量较重就是存在扑翼角差, 或者设计加工较为复杂。要设计出一种质量较轻、尺寸较小、且结构简单的扑翼 机构就显得特别重要了。本论文在以平面四杆机构的运动原理基础上,以解析法 设计急回特性的扑翼机构,这是一种新型的设计方法,设计出了一种齿轮减速装 置的曲柄摇杆扑翼机构,该机构在结构上和运动上左右完全对称并且制作简单, 运动分析和仿真结果可靠。 1.4 本文的内容安排 本论文将在借鉴国内外已有的研究成果的基础上,对于自然界中蝴蝶的飞行 机理进行研究,借助于软件和三维测试仪器建立蝴蝶翼的动力学模型,用空气动 力学的理论对其进行动力学的计算,并进行初步的结构设计及机构分析,根据分 析结果建立模型并仿真试验。主要研究内容如下: 第 1 章:绪论,本章主要介绍了国内外微型扑翼飞行器的发展现状及研究背 景。它与传统的飞行器不同,涉及的研究领域非常复杂。 第 2 章:从昆虫的飞行方式及翅膀的扑动模式入手,分析了一些昆虫以及蝴 蝶的低雷诺数飞行机理,为仿生扑翼机的设计提供了理论依据。以凤蝶为例,对 翅翼的三维形态进行测量及形态结构研究,并对其运动进行分析,为建立仿蝴蝶 翼型及扑翼机构提供数据。 第 3 章:建立仿蝴蝶翼型的二维流场分析装置,用得到的尺寸参数和运动参 数建立翼型,在软件下数值模拟出翼型在不同状态下的空气动力学特性,进行动 力学仿真、测试,试验其可行性。 第 4 章:扑翼机构的设计与建模分析。本章介绍并比较了几种类型的扑翼机 构,在以平面四杆机构运动原理的基础上,以解析法设计急回特性的扑翼机构, 并对机构进行运动分析,接着根据运动分析结果在三维软件 solidworks 中建立了 扑翼机构的三维模型及仿真分析。 第 5 章:结论和展望,对本论文研究工作的总结,并对未来研究工作的展望

南昌航空大学硕士学位论文 第2章昆虫扑翼飞行原理及蝴蝶翅形态结构 第2章 昆虫扑翼飞行原理及蝴蝶翅形态结构 昆虫的是如何利用非定常空气动力学克服阻力及自身重力来获得高升力 的?昆虫是怎样控制飞行动作来达到高超的飞行技巧的?近年的研究表明,昆虫 在拍动翅膀时产生的非定常升力是定常升力的2~3倍,足够克服昆虫的自身重 量,并且还有足够的余量来进行自由飞行。在大量低雷诺数流场下的扑翼研究中, 升力及推力产生的主要原因是有涡的生成。 2.1昆虫扑翼飞行原理 2.1.1雷诺数 对于昆虫在低速条件下的飞行机理研究需要对雷诺数有一定的理解。在粘性 不可压缩流体的运动中,起主要作用的是惯性力和粘性力,表征这两个力之间关 系的特征参数即是雷诺数B两,记作R。雷诺数的定义如下: Re=V (2-1) 式中:V一一截面的平均速度; L一一流场的特征长度: V一一流体的运动粘度。 雷诺数表示作用于流体微团的惯性力与粘性力之比。雷诺数小表示粘性力的 影响较为明显,大则表示惯性力的影响较为明显。雷诺数很小的流动,其粘性影 响遍及整个流场。雷诺数很大的流动,其粘性只影响物面附近的边界层或尾迹。 对于昆虫的飞行而言,它周围的流场属于雷诺数很小的流动。雷诺数的大小对粘 性流体的流动特性起着决定性的作用。对于流体的惯性力与粘性力可忽略的流动 称之为低雷诺数流动。 各阶段雷诺数下的效果示意图,如图2-1所示。 蝴蝶在扑翼飞行的过程中,飞行速度很小,翅膀拍动频率低,粘性力占主要 地位,主要依靠的是非定常空气动力学来完成飞行等动作,因此蝴蝶的飞行雷诺 9
南昌航空大学硕士学位论文 第 2 章 昆虫扑翼飞行原理及蝴蝶翅形态结构 9 第 2 章 昆虫扑翼飞行原理及蝴蝶翅形态结构 昆虫的是如何利用非定常空气动力学克服阻力及自身重力来获得高升力 的?昆虫是怎样控制飞行动作来达到高超的飞行技巧的?近年的研究表明,昆虫 在拍动翅膀时产生的非定常升力是定常升力的 2~3 倍,足够克服昆虫的自身重 量,并且还有足够的余量来进行自由飞行。在大量低雷诺数流场下的扑翼研究中, 升力及推力产生的主要原因是有涡的生成。 2.1 昆虫扑翼飞行原理 2.1.1 雷诺数 对于昆虫在低速条件下的飞行机理研究需要对雷诺数有一定的理解。在粘性 不可压缩流体的运动中,起主要作用的是惯性力和粘性力,表征这两个力之间关 系的特征参数即是雷诺数[34] ,记作 Re。雷诺数的定义如下: n VL Re = (2-1) 式中:V——截面的平均速度; L——流场的特征长度; n ——流体的运动粘度。 雷诺数表示作用于流体微团的惯性力与粘性力之比。雷诺数小表示粘性力的 影响较为明显,大则表示惯性力的影响较为明显。雷诺数很小的流动,其粘性影 响遍及整个流场。雷诺数很大的流动,其粘性只影响物面附近的边界层或尾迹。 对于昆虫的飞行而言,它周围的流场属于雷诺数很小的流动。雷诺数的大小对粘 性流体的流动特性起着决定性的作用。对于流体的惯性力与粘性力可忽略的流动 称之为低雷诺数流动。 各阶段雷诺数下的效果示意图,如图 2-1 所示。 蝴蝶在扑翼飞行的过程中,飞行速度很小,翅膀拍动频率低,粘性力占主要 地位,主要依靠的是非定常空气动力学来完成飞行等动作,因此蝴蝶的飞行雷诺