按平台高度可分为:地面遥感(<50m):基础研究, 测量地物波谱特性,或将地物实测波谱与遥感影像进行 对比,消除误差,开展定量遥感研究。 航空遥感(<80km,飞机飞艇汽球无人机):平台低, 空分较航天高,可用于大比例测绘或高分影像的获取。 第五章航空遥感:航空遥感更多的是使用光学相机或可见 光到近红外波段对地面进行拍照,本章介绍了航空遥感的 主要形式(垂直拍摄、倾斜拍摄;大中小比例尺等)、航 空像片的物理和几何特征等概念。中心投影和立体观察
按平台高度可分为:地面遥感(<50m):基础研究, 测量地物波谱特性,或将地物实测波谱与遥感影像进行 对比,消除误差,开展定量遥感研究。 航空遥感(<80km,飞机飞艇汽球无人机):平台低, 空分较航天高,可用于大比例测绘或高分影像的获取。 2.机动灵活,信息获取方便,不似航天受轨道的限制。 3.可作为各种星载遥感仪器的先行检验者;缺点是:1. 平台低,观察范围不如航天大。2.平台不稳定,由于多 种因素的存在,图像几何畸变较大。3.拍摄成本高,难 以象航天一样对地面实现重复观测。 第五章航空遥感:航空遥感更多的是使用光学相机或可见 光到近红外波段对地面进行拍照,本章介绍了航空遥感的 主要形式(垂直拍摄、倾斜拍摄;大中小比例尺等)、航 空像片的物理和几何特征等概念。中心投影和立体观察
上节内容复习:光电传感器:电视摄像机(波段范 围窄,电复为胶片)、光机扫描仪(镜头摆动,逐 点逐行扫描,从紫外到热红外,使用最广泛,不足 是停留在某一点上的时间较少,空分难提高)、CCD 式传感器(电荷耦合元件,排成线阵列或面阵列, 系统稳定,空分较高,是目前传感器的发展趋势, 不足是只限于2um以内) ■成像光谱仪:同时获得数十个以上的连续窄波段, 成像同时还可获得地物的圆滑光谱曲线。有利于发 现反射峰或吸收谷,从而辨别地物细微特征(差异)
◼ 上节内容复习:光电传感器:电视摄像机(波段范 围窄,电复为胶片)、光机扫描仪(镜头摆动,逐 点逐行扫描,从紫外到热红外,使用最广泛,不足 是停留在某一点上的时间较少,空分难提高)、CCD 式传感器(电荷耦合元件,排成线阵列或面阵列, 系统稳定,空分较高,是目前传感器的发展趋势, 不足是只限于2um以内) ◼ 成像光谱仪:同时获得数十个以上的连续窄波段, 成像同时还可获得地物的圆滑光谱曲线。有利于发 现反射峰或吸收谷,从而辨别地物细微特征(差异)
按平台高度可分为:地面遥感(<50m)、航空遥感 (<80km,飞机飞艇汽球无人机):1.平台低,空分 高,可用于大比例测绘或高分影像的获取。2机动灵活 信息获取方便,不受轨道限制。3.可作为各种星载遥感 仪器的先行检验者;缺点是:1平台低,观察范围小。 2.平台不稳定,图像几何畸变大。3.拍摄成本高,难以 象航天一样对地面实现重复观测。 第五章航空遥感:中心投影和立体观察
按平台高度可分为:地面遥感(<50m)、 航空遥感 (<80km,飞机飞艇汽球无人机):1.平台低,空分 高,可用于大比例测绘或高分影像的获取。2.机动灵活, 信息获取方便,不受轨道限制。3.可作为各种星载遥感 仪器的先行检验者;缺点是:1.平台低,观察范围小。 2.平台不稳定,图像几何畸变大。3.拍摄成本高,难以 象航天一样对地面实现重复观测。 第五章航空遥感:中心投影和立体观察
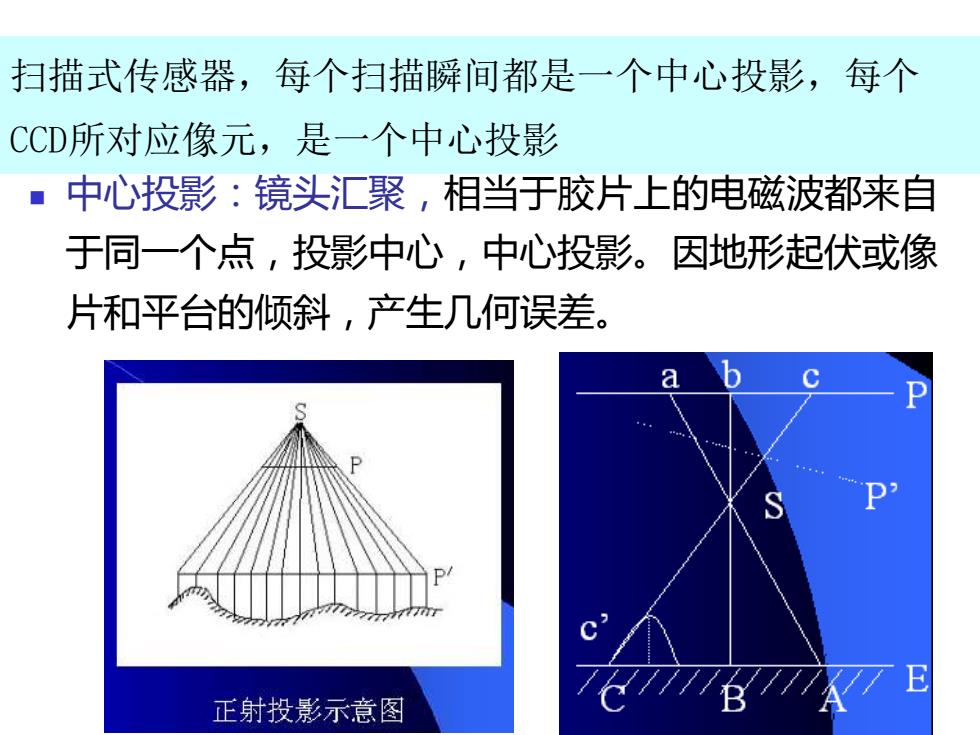
扫描式传感器,每个扫描瞬间都是一个中心投影,每个 CCD所对应像元,是一个中心投影 ■中心投影:镜头汇聚,相当于胶片上的电磁波都来自 于同一个点,投影中心,中心投影。因地形起伏或像 片和平台的倾斜,产生几何误差。 a 正射投影示意图
◼ 投影方式有很多种 中心投影,P100,按光线方向可分为中心式投影和 平行投影(正射投影)。 ◼ 中心投影:镜头汇聚,相当于胶片上的电磁波都来自 于同一个点,投影中心,中心投影。因地形起伏或像 片和平台的倾斜,产生几何误差。 扫描式传感器,每个扫描瞬间都是一个中心投影,每个 CCD所对应像元,是一个中心投影
在航空遥感中,地形起伏造成的几何误差远比航天遥 感明显。但图像中心部分的变形较小,航空遥感在拍 摄时,相邻两张照片之间会有较大重叠(为消除几何 误差或是实现立体观察)
◼ 在航空遥感中,地形起伏造成的几何误差远比航天遥 感明显。但图像中心部分的变形较小,航空遥感在拍 摄时,相邻两张照片之间会有较大重叠(为消除几何 误差或是实现立体观察)