
轮式机器人常用传感器 (2)红外对管式避障传感器 外对管式避障传感器如图所示。 红外对管式避障传感器具有一对独立收 发管,检测距离可调,较宽供电范围, 2-30cm检测距离,便于安装,使用方 便。 ®0▣日目 e
轮式机器人常用传感器 (2)红外对管式避障传感器 外对管式避障传感器如图所示。 红外对管式避障传感器具有一对独立收 发管,检测距离可调,较宽供电范围, 2-30cm检测距离,便于安装,使用方 便
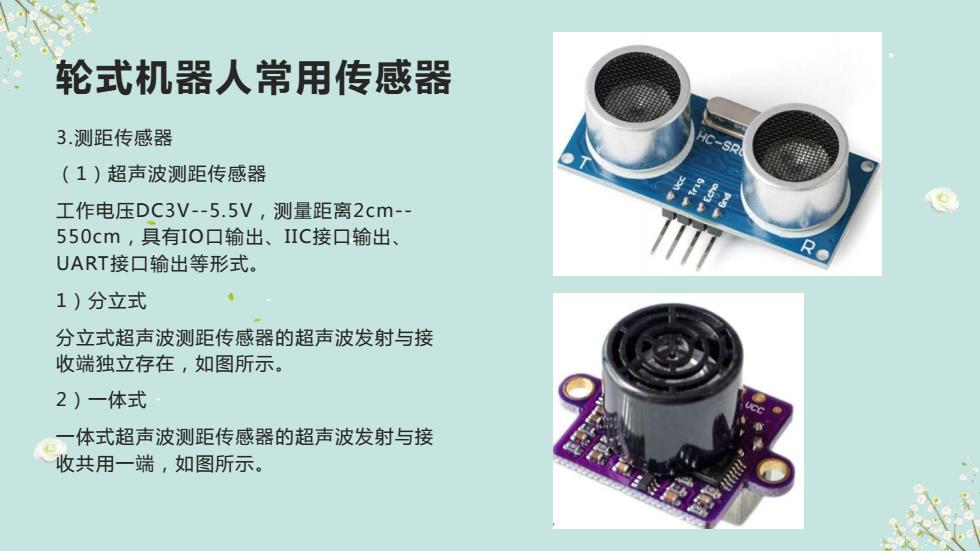
轮式机器人常用传感器 3.测距传感器 (1)超声波测距传感器 工作电压DC3V-5.5V,测量距离2cm- 550cm,具有IO口输出、IIC接口输出、 UART接口输出等形式。 1)分立式 分立式超声波测距传感器的超声波发射与接 收端独立存在,如图所示。 2)一体式 一体式超声波测距传感器的超声波发射与接 收共用一端,如图所示
轮式机器人常用传感器 3.测距传感器 (1)超声波测距传感器 工作电压DC3V-5.5V,测量距离2cm- 550cm,具有IO口输出、IIC接口输出、 UART接口输出等形式。 1)分立式 分立式超声波测距传感器的超声波发射与接 收端独立存在,如图所示。 2)一体式 一体式超声波测距传感器的超声波发射与接 收共用一端,如图所示

轮式机器人常用传感器 (2)红外测距传感器 红外测距传感器如图所示。 红外测距传感器采用三角测距方式测量距 离,测量精度不受被测物体材质、环境温 度、测量时间等条件影响。 红外测距传感器工作电压DC4.5V-5.5V 测量距离20cm-150cm,常采用模拟电 压输出,输出电压范围DCOV-Vcc
轮式机器人常用传感器 (2)红外测距传感器 红外测距传感器如图所示。 红外测距传感器采用三角测距方式测量距 离,测量精度不受被测物体材质、环境温 度、测量时间等条件影响。 红外测距传感器工作电压DC4.5V-5.5V, 测量距离20cm-150cm,常采用模拟电 压输出,输出电压范围DC0V-Vcc
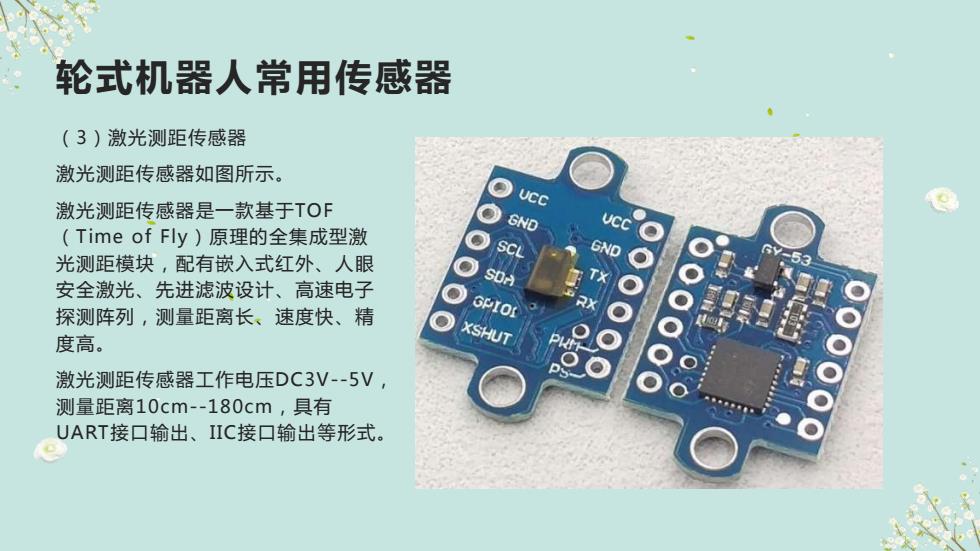
轮式机器人常用传感器 (3)激光测距传感器 激光测距传感器如图所示。 激光测距传感器是一款基于TOF VCC GND VCC (Time of Fly)原理的全集成型激 SCL 光测距模块,配有嵌入式红外、人眼 TX 安全激光、先进滤波设计、高速电子 SDA 探测阵列,测量距离长、速度快、精 GPIOL ●) 度高。 XSHUT 激光测距传感器工作电压DC3V-5V, DS- 测量距离10cm-180cm,具有 UART接口输出、IIC接口输出等形式
轮式机器人常用传感器 (3)激光测距传感器 激光测距传感器如图所示。 激光测距传感器是一款基于TOF (Time of Fly)原理的全集成型激 光测距模块,配有嵌入式红外、人眼 安全激光、先进滤波设计、高速电子 探测阵列,测量距离长、速度快、精 度高。 激光测距传感器工作电压DC3V-5V, 测量距离10cm-180cm,具有 UART接口输出、IIC接口输出等形式

轮式机器人简易开发软件 ●Linkboy软件是一套专门为痴迷技术的极客、业余IT玩家和机器人发烧友设计的集成化创意展示 平台,包含软件、电子、机械在内的一整套设计环境。 。Linkboy软件特点 1)自主可控的国产编程语言; 2)自主Python引擎; 3)首创性支持ARDUINO2560系统板; 4)所看即所得的图形化模块连线; 5)运行过程一目了然的模拟仿真; 6)面向对象编程思维模式; 7)事件驱动的多线程执行; 8)支持多种开源硬件等特点
轮式机器人简易开发软件 ● Linkboy软件是一套专门为痴迷技术的极客、业余IT玩家和机器人发烧友设计的集成化创意展示 平台,包含软件、电子、机械在内的一整套设计环境。 ● Linkboy软件特点 1)自主可控的国产编程语言; 2)自主Python引擎; 3)首创性支持ARDUINO 2560系统板; 4)所看即所得的图形化模块连线; 5)运行过程一目了然的模拟仿真; 6)面向对象编程思维模式; 7)事件驱动的多线程执行; 8)支持多种开源硬件等特点