
轮式机器人常用传感器 1.寻迹传感器 (1)独立型红外反射式寻迹传感器 独立型红外反射式寻迹传感器如图所示。 TRCT5000型传感器是最常见的独立型红外 反射式寻迹传感器,具有体积小、重量轻、 安装灵活、供电范围宽等特点,常作为黑白 线检测传感器使用。 TRCT5000型传感器工作电压DC3.3V-5V 测量距离2cm-30cm,常采用1O口输出形 心式
轮式机器人常用传感器 1.寻迹传感器 (1)独立型红外反射式寻迹传感器 独立型红外反射式寻迹传感器如图所示。 TRCT5000型传感器是最常见的独立型红外 反射式寻迹传感器,具有体积小、重量轻、 安装灵活、供电范围宽等特点,常作为黑白 线检测传感器使用。 TRCT5000型传感器工作电压DC3.3V-5V, 测量距离2cm-30cm,常采用IO口输出形 式

轮式机器人常用传感器 (2)多路红外反射式寻迹传感器 多路红外反射式寻迹传感器如图所示。 多路红外反射式寻迹传感器是将多个 TRCT5000型传感器按一定间距集成在一 块电路板上使用。 与独立型相比较,具有较宽的检测范围、 较高的灵敏度、较强的抗干扰性、较稳定 的工作性能,能够同时获取较大面积内痕 68男眼 迹线的信息,更有利于准确定位。 多路红外反射式寻迹传感器电参数与独立 型红外反射式寻迹传感器基本一致
轮式机器人常用传感器 (2)多路红外反射式寻迹传感器 多路红外反射式寻迹传感器如图所示。 多路红外反射式寻迹传感器是将多个 TRCT5000型传感器按一定间距集成在一 块电路板上使用。 与独立型相比较,具有较宽的检测范围、 较高的灵敏度、较强的抗干扰性、较稳定 的工作性能,能够同时获取较大面积内痕 迹线的信息,更有利于准确定位。 多路红外反射式寻迹传感器电参数与独立 型红外反射式寻迹传感器基本一致
轮式机器人常用传感器 (3)可见光寻迹传感器 可见光(激光)寻迹传感器如图所示。 可见光寻迹传感器具有较强抗干扰能力、 宽供电范围、宽检测距离、自带升压模块 Senso 等功能。 可见光寻迹传感器工作电压DC2.5V-5V, 测量距离10cm-150cm,常采用10口输 出形式。 DOUT vcc e
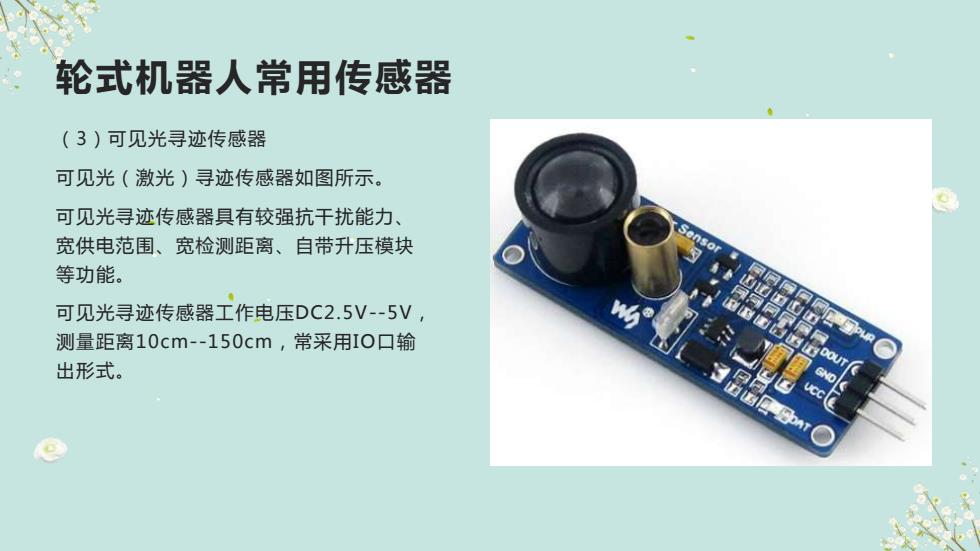
轮式机器人常用传感器 (3)可见光寻迹传感器 可见光(激光)寻迹传感器如图所示。 可见光寻迹传感器具有较强抗干扰能力、 宽供电范围、宽检测距离、自带升压模块 等功能。 可见光寻迹传感器工作电压DC2.5V-5V, 测量距离10cm-150cm,常采用IO口输 出形式

轮式机器人常用传感器 (4)智能灰度传感器 智能灰度传感器如图所示。 智能灰度传感器具有智能调节 灵敏度、串口/并口传输数据、 自带软件滤波输出、防反接保 护等功能。 智能灰度传感器工作电压 DC5V,有效测量高度 15mm-100mm,同时具有 IO口输出、UART接口输出形 式
轮式机器人常用传感器 (4)智能灰度传感器 智能灰度传感器如图所示。 智能灰度传感器具有智能调节 灵敏度、串口/并口传输数据、 自带软件滤波输出、防反接保 护等功能。 智能灰度传感器工作电压 DC5V,有效测量高度 15mm-100mm,同时具有 IO口输出、UART接口输出形 式

轮式机器人常用传感器 2避障传感器 (1)E18-D80NK型避障传感器 E18-D80NK型避障传感器如图所示。 E18-D80NK型避障传感器是一种集发射和接收 于一体的光电传感器。 E18-D80NK型避障传感器检测距离可根据需要 在10-80cm之间调节,受可见光干扰较小,易 于安装调试,使用方便,可有效检测传感器正面 障碍物。 e
轮式机器人常用传感器 2.避障传感器 (1)E18-D80NK型避障传感器 E18-D80NK型避障传感器如图所示。 E18-D80NK型避障传感器是一种集发射和接收 于一体的光电传感器。 E18-D80NK型避障传感器检测距离可根据需要 在10-80cm之间调节,受可见光干扰较小,易 于安装调试,使用方便,可有效检测传感器正面 障碍物