
第3卷第1期 智能系统学报 Vol.3 Ng 1 2008年2月 CAAI Transactions on Intelligent Systems Fcb.2008 基于灰色预测的自适应内模PD双重控制器设计 吴晓威张井岗赵志诚 (太原科技大学电子与信息工程学院,山西太原030024) 摘要:针对一类非线性系统,提出一种基于灰色预测的自适应内模PD双重控制方法.把由系统的输入输出数据 得到的灰色预测模型作为系统的内部模型,并在基本的内模控制结构上增加PD控制器,加快了跟踪误差收敛速 度,内模控制的性能明显改善.仿真结果表明,该控制方法简单而有效,内模PD双重控制较单一内模控制具有更 好的系统性能 关键词:内模控制;PD控制;灰色预测模型 中图分类号:TP273文献标识码:A文章编号:1673-4785(2008)01-0071-06 Design of a dual controller with an ada ptive internal model and PID in conjunction with grey prediction WU Xiao-wei,ZHAN G Jing gang,ZHAO Zhi-cheng (College of Electronics and Information Engineering,Taiyuan University of Science &Technology,Taiyuan 030024,China) Abstract:A dual controller strategy with an adaptive internal model in conjunction with grey prediction and PID controller is presented for nonlinear systems.The grey prediction model,which was obtained from in- put-output data,was employed as the internal model of the system.A PID controller was added to the o- riginal IMC structure in order to speed up tracking of error convergence and improve IMC controller per- formance.Simulation results demonstrate that the proposed control strategy is simpler and more effective, indicating that a dual IMC and PID controller has better performance than a controller with only IMC. Keywords:internal model control;grey prediction model;nonlinear system 内模控制(internal model control,IMC)的概非线性系统).Volterra级数需要相当多的被估计 念是l982年由Garcia和Morari提出的,由于它具 参数才能取得满意的精度,这在很大程度上限制了 有跟踪调节性能好、鲁棒性强、能消除不可预测干扰 这种方法的应用 的影响、设计简单等优点,已经成为工业过程控制系 灰色预测控制是一种将控制理论和灰色系统理 统的一类有效控制结构).目前内模控制已推广到 论相结合的新型控制方法.这种控制方法具有对模 非线性系统,并在非线性系统领域中取得了显著成 型精度要求低、在线估计参数少、计算方便、控制综 果.目前非线性内模控制常见模型为:神经网络模 合效果好等优点,目前被广泛应用于工业过程控制 型51、小波神经网络模型61、模糊系统模型1、Vo-领域.文中将灰色预测GM(1,2)模型作为系统的内 terra级数模型,、模糊神经网络模型o1等,这些部模型.该模型只要在线检测过程的输入和输出数 方法在一定程度上改善了控制性能,但他们也存在 据,而不需要复杂的辨识过程,计算简单.在基本的 一些问题.采用神经网络、模糊系统建模方案,一般 内模控制结构上增加PD控制器,使得跟踪误差较 仅给出训练算法,算法的收敛性和系统稳定性分析 快收敛,内模控制的性能明显改善,仿真结果表明 往往停留在定性分析上,而且常局限于某一特定的 该控制方法简单而有效,内模/PD控制较单一内 模控制具有更好的系统性能」 收稿日期:2007-0717. 基金项目:山西省自然科学基金资助项目(2007011049);山西省教育 1灰色预测模型 厅科技资助顶目(20051311). 通讯作者:吴晓威.Email:wxwei2002467@126.com 这里采用灰色预测GM(1,2)模型 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
第 3 卷第 1 期 智 能 系 统 学 报 Vol. 3 №. 1 2008 年 2 月 CAA I Transactions on Intelligent Systems Feb. 2008 基于灰色预测的自适应内模 PID 双重控制器设计 吴晓威 ,张井岗 ,赵志诚 (太原科技大学 电子与信息工程学院 ,山西 太原 030024) 摘 要 :针对一类非线性系统 ,提出一种基于灰色预测的自适应内模 PID 双重控制方法. 把由系统的输入输出数据 得到的灰色预测模型作为系统的内部模型 ,并在基本的内模控制结构上增加 PID 控制器 ,加快了跟踪误差收敛速 度 , 内模控制的性能明显改善. 仿真结果表明 ,该控制方法简单而有效 , 内模 PID 双重控制较单一内模控制具有更 好的系统性能. 关键词 :内模控制 ; PID 控制 ;灰色预测模型 中图分类号 : TP273 文献标识码 :A 文章编号 :167324785 (2008) 0120071206 Design of a dual controller with an adaptive internal model and PID in conjunction with grey prediction WU Xiao2wei , ZHAN G Jing2gang , ZHAO Zhi2cheng (College of Electronics and Information Engineering , Taiyuan University of Science &Technology , Taiyuan 030024 , China) Abstract :A dual controller strategy wit h an adaptive internal model in conjunction wit h grey prediction and PID controller is presented for nonlinear systems. The grey prediction model , which was obtained from in2 p ut2outp ut data , was employed as the internal model of the system. A PID controller was added to t he o2 riginal IMC struct ure in order to speed up tracking of error convergence and improve IMC controller per2 formance. Simulation results demonstrate t hat the proposed control strategy is simpler and more effective , indicating t hat a dual IMC and PID controller has better performance t han a controller wit h only IMC. Keywords : internal model control ; grey prediction model ; nonlinear system 收稿日期 :2007207217. 基金项目 :山西省自然科学基金资助项目(2007011049) ;山西省教育 厅科技资助项目(20051311) . 通讯作者 :吴晓威. E2mail :wxwei2002467 @126. com. 内模控制 (internal model control , IMC) 的概 念是 1982 年由 Garcia 和 Morari 提出的 , 由于它具 有跟踪调节性能好、鲁棒性强、能消除不可预测干扰 的影响、设计简单等优点 ,已经成为工业过程控制系 统的一类有效控制结构[122 ] . 目前内模控制已推广到 非线性系统 ,并在非线性系统领域中取得了显著成 果. 目前非线性内模控制常见模型为 :神经网络模 型[325 ] 、小波神经网络模型[6 ] 、模糊系统模型[ 7 ] 、Vol2 terra 级数模型[829 ] 、模糊神经网络模型[ 10211 ] 等 ,这些 方法在一定程度上改善了控制性能 ,但他们也存在 一些问题. 采用神经网络、模糊系统建模方案 , 一般 仅给出训练算法 ,算法的收敛性和系统稳定性分析 往往停留在定性分析上 ,而且常局限于某一特定的 非线性系统[2 ] . Volterra 级数需要相当多的被估计 参数才能取得满意的精度 ,这在很大程度上限制了 这种方法的应用. 灰色预测控制是一种将控制理论和灰色系统理 论相结合的新型控制方法. 这种控制方法具有对模 型精度要求低、在线估计参数少、计算方便、控制综 合效果好等优点 ,目前被广泛应用于工业过程控制 领域. 文中将灰色预测 GM (1 ,2) 模型作为系统的内 部模型. 该模型只要在线检测过程的输入和输出数 据 ,而不需要复杂的辨识过程 ,计算简单. 在基本的 内模控制结构上增加 PID 控制器 ,使得跟踪误差较 快收敛 ,内模控制的性能明显改善. 仿真结果表明 , 该控制方法简单而有效 , 内模/ PID 控制较单一内 模控制具有更好的系统性能. 1 灰色预测模型 这里采用灰色预测 GM (1 ,2) 模型

·72 智能系统学报 第3卷 设可测得其输入和输出时间序列如下: 输入: 令2-PD控制 uk) 0=(u01),02,…(w), 蓉制u因对象 b(k) 1 输出: 灰色预 ( y0=(y0(1),y0(2,y0(). (2) 测模型 e) 对序列1)和(2)进行一次累加生成1-AG0, "(d=∑(W,i=1,2,r, 3) 图1基于灰色预测内模PD结构图 Fig.I Block diagram of adaptive internal model and "0=Wi=1,2.r (4) PID dual controller based on grey prediction 利用一次累加生成数据列(3)和(4),可建立 将式(12)化简为 GM1,2)灰微分方程 (1-a)y0(k+1)=民小u(k+1).13) yo(k2+ax(d=bW(H」 5) 式中:a=1-Ta,B=Tb,T为采样周期. 式中:z"(材为背景值, 所以,系统的估计脉冲传递函数为 ”(内=之k)+”内 6) 1-41 (14) GM(1,2)白化方程 可将过程模型G分解为2部分,即 dd+w"()=bm"(0 7 d(n) Gr(=)=Gr.(=)Gr.(=) 15) 式中:a为发展系数,反映y的发展态势:系数b的 式中 Gp+(E=Σ1, 大小反映控制变量u对行为变量y@的影响大小与 影响极性“+”为促进,“.”为抑制.这些参数利用 tin.(s)te 31 1·5, (16) 最小二乘法求解 14<1. =(BTB)BY. 8) 为保证控制器可实现,取 Gsuc =n()f=). 17) 式中: -02)92 式中:)=之为内模控制器的可实现因 (9) 子,这里选为滤波器形式所以,内模控制器 … GMc=L-a业,L.1 L-(n ( B (1-) (18) 将方程7)离散化,得到 式中:aB由灰色预测模型得到. y"(k+)=1-Tay"(d+Tbr"(W.(10) 文中采用等维信息GM(1,2)模型,就是在增加 将式10)乘以差分算子的平方△=1·:1(:1为滞 最新信息的同时,去掉最老信息,在滚动建模时保持 后算子),经整理得 数据个数不变,然后在此基础上建立灰色预测模型. y(k+1)(1-Ta)y(k)Tbu(k). 灰色预测控制的参数,随着系统的运行进行,不断的 (11) 自动更新,具有很强的自适应性 2.2P1D控制设计 2基于灰色预测的双重控制策略 图1在基本内模控制的基础上,加入PD控制 2.1灰色内模控制器 器,用设定值y,(:与实际输出值y(的差作用于 基本的内模控制结构如图1虚框内所示.其中 PD控制器. d为扰动,h为内模控制器的输出,a为PD控制 图1中PD控制器取增量形式: 器的输出.滤波器F可增强系统的鲁棒性,平滑噪 △边(材=kp(a(W-a(k-1))+ke2(W+ 声,柔化快变信号,以改善系统响应的过渡过程, ka(a(W-2a(k-1)+a(k-2).19) 由式11)可以得到 式中:kp、k、k:分别为比例、积分和微分时间常数。 (1-1-Taz)yo(k+1)=Tbz1u0(k+1) b()=地(k-1)+△(), 20) 12) 段(付=r材-y(材 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
设可测得其输入和输出时间序列如下 : 输入 : u (0) = ( u (0) (1) , u (0) (2) , …u (0) ( r) ) , (1) 输出 : y (0) = ( y (0) (1) , y (0) (2) , …y (0) ( r) ) . (2) 对序列(1) 和(2) 进行一次累加生成 12A GO , u (1) ( i) = ∑ i k = 1 u (0) ( k) , i = 1 ,2 , …, r, (3) y (1) ( i) = ∑ i k = 1 y (0) ( k) , i = 1 ,2 , …, r. (4) 利用一 次 累 加 生 成 数 据 列 ( 3 ) 和 ( 4 ) , 可 建 立 GM (1 ,2) 灰微分方程 y (0) ( k′) + az (1) ( k) = bu (1) ( k) . (5) 式中 :z (1) ( k) 为背景值 , z (1) ( k) = 1 2 ( y (1) ( k - 1) + y (1) ( k) ) , (6) GM (1 ,2) 白化方程 d y (1) ( t) d ( t) + ay (1) ( t) = bu (1) ( t) . (7) 式中 : a 为发展系数 ,反映 y (0) 的发展态势;系数 b的 大小反映控制变量 u 对行为变量 y (0) 的影响大小与 影响极性“( + ”为促进“, - ”为抑制) . 这些参数利用 最小二乘法求解 a b = (B T B) - 1 BY. (8) 式中 : B = - z (1) (2) u (1) (2) - z (1) (3) u (1) (3) … … - z (1) ( n) u (1) ( n) . (9) 将方程(7) 离散化 ,得到 y (1) ( k + 1) = (1 - Ta) y (1) ( k) + Tbu (1) ( k) . (10) 将式(10) 乘以差分算子的平方Δ= 1 - z - 1 ( z - 1为滞 后算子) ,经整理得 y (0) ( k + 1) = (1 - Ta) y (0) ( k) + Tbu (0) ( k) . (11) 2 基于灰色预测的双重控制策略 2. 1 灰色内模控制器 基本的内模控制结构如图 1 虚框内所示. 其中 d 为扰动 , u1 为内模控制器的输出 , u2 为 PID 控制 器的输出. 滤波器 F 可增强系统的鲁棒性 ,平滑噪 声 ,柔化快变信号 ,以改善系统响应的过渡过程. 由式(11) 可以得到 (1 - (1 - Ta) z - 1 ) y (0) ( k + 1) = Tbz - 1 u (0) ( k + 1) . (12) 图 1 基于灰色预测内模 PID 结构图 Fig. 1 Block diagram of adaptive internal model and PID dual controller based on grey prediction 将式(12) 化简为 (1 - αz - 1 ) y (0) ( k + 1) =βz - 1 u( k + 1) . (13) 式中 :α= 1 - T a ,β= Tb, T 为采样周期. 所以 ,系统的估计脉冲传递函数为 G ^ P = βz - 1 1 - αz - 1 . (14) 可将过程模型G ^ P 分解为 2 部分 ,即 G ^ P ( z - 1 ) = G ^ P+ ( z - 1 ) G ^ P- ( z - 1 ) . (15) 式中 : G ^ P+ ( z - 1 ) = z - 1 , G ^ P- ( z - 1 ) = G ^ P ( z - 1 ) z - 1 = β (1 - αz - 1 ) , (16) |α| < 1. 为保证控制器可实现 ,取 GIMC = G ^ - 1 P- ( z - 1 ) f ( z - 1 ) . (17) 式中 : f ( z - 1 ) = 1 - λ 1 - λz - 1 为内模控制器的可实现因 子 ,这里选为滤波器形式. 所以 ,内模控制器 GIMC = (1 - αz - 1 ) β · 1 - λ (1 - λz - 1 ) . (18) 式中 :α、β由灰色预测模型得到. 文中采用等维信息 GM (1 ,2) 模型 ,就是在增加 最新信息的同时 ,去掉最老信息 ,在滚动建模时保持 数据个数不变 ,然后在此基础上建立灰色预测模型. 灰色预测控制的参数 ,随着系统的运行进行 ,不断的 自动更新 ,具有很强的自适应性. 2. 2 PI D 控制设计 图 1 在基本内模控制的基础上 ,加入 PID 控制 器 ,用设定值 y r ( k) 与实际输出值 y ( k) 的差作用于 PID 控制器. 图 1 中 PID 控制器取增量形式 : Δu2 ( k) = k p ( e2 ( k) - e2 ( k - 1) ) + kie2 ( k) + kd ( e2 ( k) - 2e2 ( k - 1) + e2 ( k - 2) ) . (19) 式中 : k p 、ki 、k d 分别为比例、积分和微分时间常数. u2 ( k) = u2 ( k - 1) +Δu2 ( k) , e2 ( k) = r( k) - y ( k) . (20) · 27 · 智 能 系 统 学 报 第 3 卷
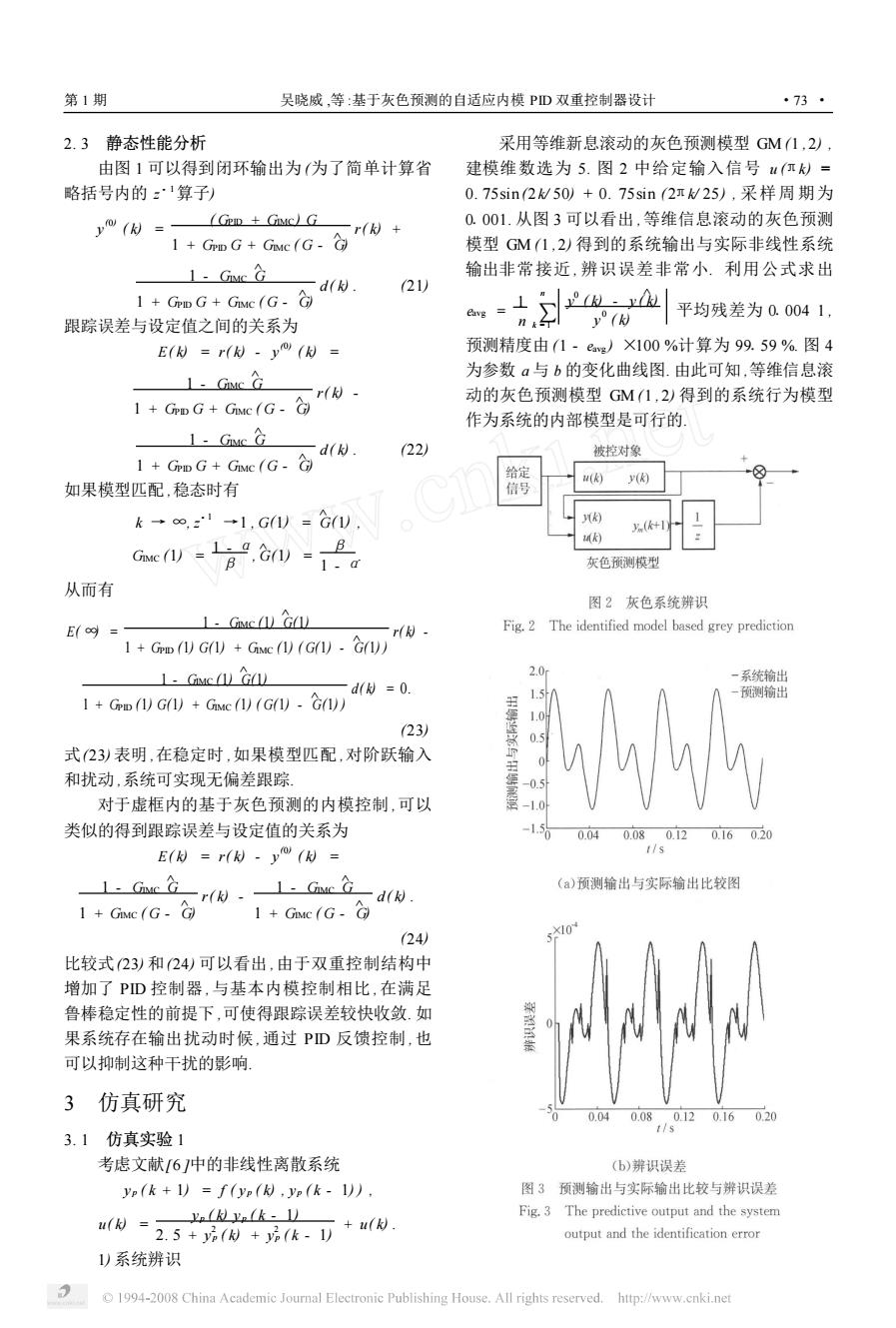
第1期 吴晓威,等:基于灰色预测的自适应内模PD双重控制器设计 ·73 2.3静态性能分析 采用等维新息滚动的灰色预测模型GM(1,2), 由图1可以得到闭环输出为(为了简单计算省 建模维数选为5.图2中给定输入信号“mk)= 略括号内的z1算子) 0.75sin(2M50)+0.75sin(2rM25),采样周期为 yO(付=LGD+GiC)G r(+ 0.001.从图3可以看出,等维信息滚动的灰色预测 1+GPID G+GMC(G-G) 模型GM(1,2)得到的系统输出与实际非线性系统 1.Gisc 输出非常接近,辨识误差非常小.利用公式求出 d(k 21) 1+GPIDG+GIMC(G-G) 平均残差为0.0041, 跟踪误差与设定值之间的关系为 ny°(材 E(W=r(材-y0(付= 预测精度由1-ee)×100%计算为99.59%.图4 1-GiMc G 为参数a与b的变化曲线图.由此可知,等维信息滚 r(k- 动的灰色预测模型GM(1,2)得到的系统行为模型 1+GPD G+GMC (G-G) 作为系统的内部模型是可行的, 1-Give d(k 22) 被控对象 1+GPID G+GMc(G-G) 给定 y(k) 如果模型匹配,稳态时有 信号 k→∞,z1→1,G1)=G) cw-合aW=2 ) 灰色预测模型 从而有 图2灰色系统辨识 1-Gc(D)G(D) E(o9 Fig.2 The identified model based grey prediction 1+GPID (1)G(1)GMc (1)(G(1)-G(1)) 1.Guc(D)G( 2. 系统输出 d=0. 1+GP(1)G(1)GMc(1)(G(1)-G(1) (23) 0.5 式23)表明,在稳定时,如果模型匹配,对阶跃输入 和扰动,系统可实现无偏差跟踪 0.5 对于虚框内的基于灰色预测的内模控制,可以 类似的得到跟踪误差与设定值的关系为 0.04 0.080.12 0.160.20 E(W=r(-y(材= 1/s 1-Gouc -r()-1-Guc (a)预测输出与实际输出比较图 1+GiMc(G-G 1 Gose (G. -d( (24) x10 比较式23)和24)可以看出,由于双重控制结构中 增加了PD控制器,与基本内模控制相比,在满足 鲁棒稳定性的前提下,可使得跟踪误差较快收敛.如 果系统存在输出扰动时候,通过PD反馈控制,也 可以抑制这种干扰的影响」 3仿真研究 0.04 0.080120.160.20 3.1仿真实验1 t/s 考虑文献[6中的非线性离散系统 (b)辨识误差 yp(k +1)f(ye(k).yp(k-1)). 图3预测输出与实际输出比较与辨识误差 vo(k)ynck-1 Fig.3 The predictive output and the system 州=2.5十房利+房k.D+0, output and the identification error 1)系统辨识 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
2. 3 静态性能分析 由图 1 可以得到闭环输出为 (为了简单计算省 略括号内的 z - 1算子) y (0) ( k) = ( GPID + GIMC ) G 1 + GPID G + GIMC ( G - G ^ ) r( k) + 1 - GIMC G ^ 1 + GPID G + GIMC ( G - G ^ ) d ( k) . (21) 跟踪误差与设定值之间的关系为 E( k) = r( k) - y (0) ( k) = 1 - GIMC G ^ 1 + GPID G + GIMC ( G - G ^ ) r( k) - 1 - GIMC G ^ 1 + GPID G + GIMC ( G - G ^ ) d ( k) . (22) 如果模型匹配 ,稳态时有 k → ∞, z - 1 →1 , G(1) = G ^ (1) , GIMC (1) = 1 - α β , G ^ (1) = β 1 - α . 从而有 E( ∞) = 1 - GIMC (1) G ^ (1) 1 + GPID (1) G(1) + GIMC (1) ( G(1) - G ^ (1) ) r( k) - 1 - GIMC (1) G ^ (1) 1 + GPID (1) G(1) + GIMC (1) ( G(1) - G ^ (1) ) d( k) = 0. (23) 式(23) 表明 ,在稳定时 ,如果模型匹配 ,对阶跃输入 和扰动 ,系统可实现无偏差跟踪. 对于虚框内的基于灰色预测的内模控制 ,可以 类似的得到跟踪误差与设定值的关系为 E( k) = r( k) - y (0) ( k) = 1 - GIMC G ^ 1 + GIMC ( G - G ^ ) r( k) - 1 - GIMC G ^ 1 + GIMC ( G - G ^ ) d ( k) . (24) 比较式(23) 和(24) 可以看出 ,由于双重控制结构中 增加了 PID 控制器 ,与基本内模控制相比 ,在满足 鲁棒稳定性的前提下 ,可使得跟踪误差较快收敛. 如 果系统存在输出扰动时候 ,通过 PID 反馈控制 ,也 可以抑制这种干扰的影响. 3 仿真研究 3. 1 仿真实验 1 考虑文献[6 ]中的非线性离散系统 y p ( k + 1) = f ( y p ( k) , y p ( k - 1) ) , u( k) = y p ( k) y p ( k - 1) 2. 5 + y 2 p ( k) + y 2 p ( k - 1) + u( k) . 1) 系统辨识 采用等维新息滚动的灰色预测模型 GM (1 ,2) , 建模维数选为 5. 图 2 中给定输入信号 u (πk) = 0. 75sin (2 k/ 50) + 0. 75sin ( 2πk/ 25) , 采样周期为 01001. 从图 3 可以看出 ,等维信息滚动的灰色预测 模型 GM (1 , 2) 得到的系统输出与实际非线性系统 输出非常接近 , 辨识误差非常小. 利用公式求出 eavg = 1 n ∑ n k = 1 y 0 ( k) - y ( k) ^ y 0 ( k) 平均残差为 01004 1 , 预测精度由 (1 - eavg ) ×100 %计算为 99159 %. 图 4 为参数 a 与 b 的变化曲线图. 由此可知 ,等维信息滚 动的灰色预测模型 GM (1 , 2) 得到的系统行为模型 作为系统的内部模型是可行的. 第 1 期 吴晓威 ,等 :基于灰色预测的自适应内模 PID 双重控制器设计 · 37 ·

·74 智能系统学报 第3卷 0 y(k+1)=0.5sin(y(d)+3u(d+ sin(y(k)u(k) 0.5 1+y2( 采用等维新息滚动的灰色预测模型GM1,2), -1.0 建模维数选为5.在图2中,给定输入信号u()= sin(2r/10)+sin(2r/25),从图6中可以看出,预 测输出与系统的实际输出非常接近,预测误差也非 20 常小,最大误差为0.0443,平均误差为0.0068.预 0.04 0.080.120.16020 测精度为99.32%.图7为参数a与b的变化曲 t/s 线图 (a)参数a的变化曲线图 一系统输出 一预测输出 0.040.080.120.16020 0.040.080.120.16020 (a)预测输出与实际输出比较图 11s 310 (b)参数b的变化曲线图 图4参数a,b的变化曲线图 Fig.4 The change of the parameters of a and b 2)输出跟踪研究: 给定参考输入r(付为方波信号.仿真中可实现 因子入=0.5.PD控制器的参数为kp=0.1,k= 0.07,k:=0.在图5中,实线为文中方法,虚线为文 0.040.080.120.160.20 献[6]采用小波神经网络内模加PD控制器方法, 1/S 文中所提方法比文献[6方法响应速度快,控制效果 更好 (b)辨识误差 图6预测输出与实际输出比较与辨识误差 2.0 Fig.6 The predictive output and the system 6 output and the identification error 12 2.0 0.8 1.0 0.4 0 6 图52种控制方案的输出比较图 Fig.5 Simulation results of the different controller 206 0.040.080.120.16020 3.2仿真实验2 1/5 考虑文献[4]中的非线性系统: (a)参数a的变化曲线图 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved. http://www.cnki.net
2) 输出跟踪研究 : 给定参考输入 r( k) 为方波信号. 仿真中可实现 因子λ= 015. PID 控制器的参数为 k p = 011 , ki = 0107 , kd = 0. 在图 5 中 , 实线为文中方法 ,虚线为文 献[6 ]采用小波神经网络内模加 PID 控制器方法. 文中所提方法比文献[6 ]方法响应速度快 ,控制效果 更好. 图 5 2 种控制方案的输出比较图 Fig. 5 Simulation results of the different controller 3. 2 仿真实验 2 考虑文献[4 ]中的非线性系统 : y ( k + 1) = 0. 5sin ( y ( k) ) + 3 u( k) + sin ( y ( k) u( k) ) 1 + y 2 ( k) . 采用等维新息滚动的灰色预测模型 GM (1 ,2) , 建模维数选为 5. 在图 2 中 ,给定输入信号 u ( k) = sin (2πk/ 10) + sin (2πk/ 25) ,从图 6 中可以看出 ,预 测输出与系统的实际输出非常接近 ,预测误差也非 常小 ,最大误差为 01044 3 ,平均误差为 01006 8. 预 测精度为 99132 %. 图 7 为参数 a 与 b 的变化曲 线图. · 47 · 智 能 系 统 学 报 第 3 卷

第1期 吴晓威,等:基于灰色预测的自适应内模PD双重控制器设计 ·75 [2]周涌,陈庆伟,胡维礼.内模控制研究的新发展[U]. 控制理论与应用,2004,21(3):475482。 ZHOU Yong,CHEN Qingwei,HU Weili.New develop- ments of research on internal model control [J].Control Theory Applications,2004,21(3):475-482. [3]LI S,LIJ H.IMC-PID control of ultrar sonic motor ser- vo system based on neural network[C]//Proceedings of the 6th World Congress on Control and Automation. 0.04 0.080.120.160.20 Dalian,China,2006. 1/s [4 ]LI H X,DENG H.An approximate internal model-based neural control for unknown nonlinear discrete processes b)参数b的变化曲线图 [J].IEEE Transactions on Neural Networks,2006,17 图7参数a、b的变化曲线图 (3):695670. Fig.7 The change of the parameters of a and b (5]HABER R E,AL IQUE J R.Nonlinear internal model 图8中可实现因子选为入=0.7.PD控制器的参数 control using neural networks:an application for machi- 为kp=0.01,k=0.1,ka=0.01.实线为文中方法, ning processes[J].Neural Comput&Applic,2004,13: 虚线为文献[4]采用基于神经网络的逼近内模控制 4755 方法.从图中可以看出文中方法响应速度快,控制效 [6]吕朝霞,吴晓蓓,郭建,等.基于小波网络的非线性内 模控制[J].控制与决策,2001,16(1):6568 果明显改善 LU'Zhaoxia,WU Xiaobei,GUO Jian,et al.Nonlinear 2.0 internal model control based on wavelet network [J]. 6 Control and Decision,2001,16(1):65-68. [7]HABER R E.Nonlinear internal model control using 12 neural networks and fuzzy logic:application to an elec- 0.8 tromechanical process [J].LNCS,2006,2657:351- 360. 0.4 [8]党映农,韩崇昭.基于Volterra级数模型的内模控制方 法0].西安交通大学学报,2001,35(4):385389 1/s DANG Yingnong,HAN Chongzhao.Internal model con trol for uncertain Volterra series system [J ]Journal of 图82种挖制方案的输出比较图 Xian Jiaotong University,2001,35(4):385-389. Fig.8 Simulation results of the different controller [9]刘士荣,林卫星,俞金寿,等.非线性动态系统神经模糊 建模与内模/PD双重控制系统设计[J],控制理论与应 4结束语 用,2004,21(4):553-560. LIU Shirong,L IN Weixing,YU jinshou,et al.Neuro- 针对非线性系统,提出一种基于灰色预测的自 fuzzy modeling for nonlinear dynamic systems and double 适应内模/PD双重控制方法.该控制方法结合了灰 control system design with internal model control and 色预测、内模控制和PD控制器的优点.与基本内 PID control [J ]Control Theory Applications,2004 模控制相比,在满足鲁棒稳定前提下,可使得跟踪误 21(4):553-560. 差较快收敛.如果系统存在输出扰动时候,通过PD [10]HE MJ,CAI WJ,WU B F.Design of decentralized 反馈控制,也可以抑制这种干扰的影响.仿真结果表 IMC-PID controller based on dRi analysis[J].American 明该方法的有效性 Institute of Chemical Engineers,2006,52(11):3852- 3863. 参考文献: [11]LI C Y,HUANG T L.Optimal design for the grey prediction PID controller for power system stabilizers by [1]赵曜.内模控制发展综述[U].信息与控制,2000,29 evolutionary programming [C]//Proceedings of the (6):526531. 2004 IEEE International Conference on Networking, ZHAO Yao.A survey of development of internal model Sensing Control.Taipei,China,2004. control[J ]Information and Control,2000,29(6):526- [12]DINGC C,LEE K T.Optimal design for power system 531 dynamic stabilizer by grey prediction PID control[C]// 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
(b) 参数 b的变化曲线图 图 7 参数 a、b的变化曲线图 Fig. 7 The change of the parameters of a and b 图 8 中可实现因子选为λ= 017. PID 控制器的参数 为 k p = 0101 , ki = 011 , k d = 0101. 实线为文中方法 , 虚线为文献[4 ]采用基于神经网络的逼近内模控制 方法. 从图中可以看出文中方法响应速度快 ,控制效 果明显改善. 图 8 2 种控制方案的输出比较图 Fig. 8 Simulation results of the different controller 4 结束语 针对非线性系统 ,提出一种基于灰色预测的自 适应内模/ PID 双重控制方法. 该控制方法结合了灰 色预测、内模控制和 PID 控制器的优点. 与基本内 模控制相比 ,在满足鲁棒稳定前提下 ,可使得跟踪误 差较快收敛. 如果系统存在输出扰动时候 ,通过 PID 反馈控制 ,也可以抑制这种干扰的影响. 仿真结果表 明该方法的有效性. 参考文献 : [1 ]赵 曜. 内模控制发展综述[J ]. 信息与控制 , 2000 , 29 (6) : 5262531. ZHAO Yao. A survey of development of internal model control[J ]. Information and Control , 2000 , 29 (6) :5262 531. [2 ]周 涌 , 陈庆伟 , 胡维礼. 内模控制研究的新发展[J ]. 控制理论与应用 , 2004 , 21 (3) : 4752482. ZHOU Yong ,CHEN Qingwei , HU Weili. New develop2 ments of research on internal model control[J ]. Control Theory & Applications , 2004 , 21 (3) : 4752482. [3 ]L I S , L IJ H. IMC2PID control of ultra2sonic motor ser2 vo system based on neural network[ C]/ / Proceedings of the 6th World Congress on Control and Automation. Dalian , China , 2006. [ 4 ]L I H X , DEN G H. An approximate internal model2based neural control for unknown nonlinear discrete processes [J ]. IEEE Transactions on Neural Networks , 2006 , 17 (3) : 6952670. [5 ] HABER R E , AL IQU E J R. Nonlinear internal model control using neural networks: an application for machi2 ning processes[J ]. Neural Comput & Applic , 2004 ,13 : 47255. [6 ]吕朝霞 ,吴晓蓓 , 郭 建 , 等. 基于小波网络的非线性内 模控制[J ]. 控制与决策 ,2001 ,16 (1) :65268. LU¨Zhaoxia , WU Xiaobei , GUO Jian , et al. Nonlinear internal model control based on wavelet network [J ]. Control and Decision ,2001 ,16 (1) :65268. [ 7 ] HABER R E. Nonlinear internal model control using neural networks and fuzzy logic : application to an elec2 tromechanical process [J ]. LNCS , 2006 , 2657 : 3512 360. [8 ]党映农 ,韩崇昭. 基于 Volterra 级数模型的内模控制方 法[J ] . 西安交通大学学报 ,2001 ,35 (4) :3852389. DAN G Yingnong , HAN Chongzhao. Internal model con2 trol for uncertain Volterra series system [J ]. Journal of Xi’an Jiaotong University , 2001 ,35 (4) :3852389. [9 ]刘士荣 ,林卫星 ,俞金寿 ,等. 非线性动态系统神经模糊 建模与内模/ PID 双重控制系统设计[J ]. 控制理论与应 用 ,2004 ,21 (4) :5532560. L IU Shirong , L IN Weixing , YU jinshou , et al. Neuro2 fuzzy modeling for nonlinear dynamic systems and double control system design with internal model control and PID control[J ]. Control Theory & Applications ,2004 , 21 (4) :5532560. [10 ] HE M J , CAI W J ,WU B F. Design of decentralized IMC2PID controller based on dRi analysis[J ]. American Institute of Chemical Engineers , 2006 , 52 ( 11) : 38522 3863. [11 ]L I C Y , HUAN G T L. Optimal design for the grey prediction PID controller for power system stabilizers by evolutionary programming [ C ]/ / Proceedings of the 2004 IEEE International Conference on Networking , Sensing & Control. Taipei , China ,2004. [12 ]DIN G C C , L EE K T. Optimal design for power system dynamic stabilizer by grey prediction PID control[ C]/ / 第 1 期 吴晓威 ,等 :基于灰色预测的自适应内模 PID 双重控制器设计 · 57 ·