四肢行走 ·用四肢行走的动物,为了在运动中使身体重心位 于适当位置以维持平衡,当先举起一腿时,重心 便会落在由其余三条腿所组成的三角形内 一举起腿就使脚离开地面,负荷因子变为零 一体重落在其他三只脚上,这三只脚的负荷因子各不 相同
四肢行走 • 用四肢行走的动物,为了在运动中使身体重心位 于适当位置以维持平衡,当先举起一腿时,重心 便会落在由其余三条腿所组成的三角形内 – 举起腿就使脚离开地面,负荷因子变为零 – 体重落在其他三只脚上,这三只脚的负荷因子各不 相同
双腿行走 ·人和鸟类以双腿行走,体重由双腿交替负担 (b (a) 人行走时腿的用力方向 力矢量的分析:重心约在臀部稍上处, 腿对躯体所用的力等于脚对地面所用 的力
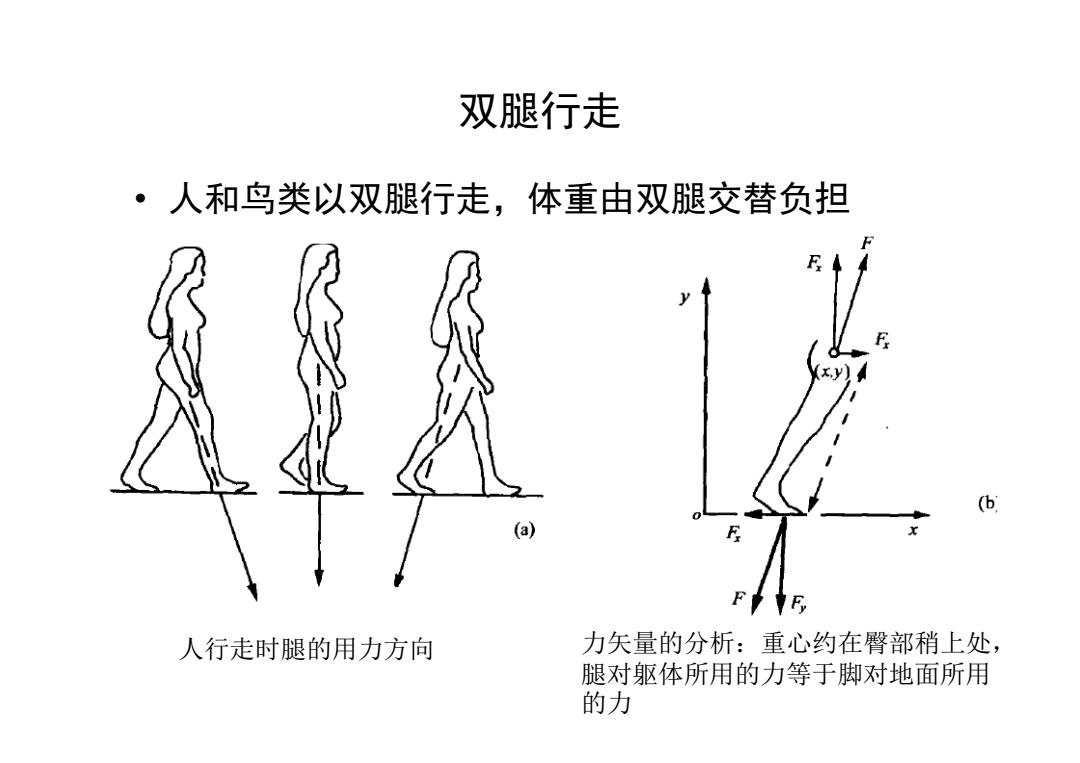
双腿行走 • 人和鸟类以双腿行走,体重由双腿交替负担 人行走时腿的用力方向 力矢量的分析:重心约在臀部稍上处, 腿对躯体所用的力等于脚对地面所用 的力
双腿行走 oE 四肢行走或双腿行走,脚的负荷因子是不同的 ·设计一种带有电功率转送器的踏板,当人或动物 在上面走过时可记录脚在不同方向力的组成,这 对研究步法很有帮助
双腿行走 • 四肢行走或双腿行走,脚的负荷因子是不同的 • 设计一种带有电功率转送器的踏板,当人或动物 在上面走过时可记录脚在不同方向力的组成,这 对研究步法很有帮助

步法的影响因素 ·动物的步法受到多种因素的影响 一跨步的频率和长度,影响身体的稳定性 一地面的情况和坡度 冰雪弯道、坡道
步法的影响因素 • 动物的步法受到多种因素的影响 – 跨步的频率和长度,影响身体的稳定性 – 地面的情况和坡度 冰雪弯道、坡道
哺乳动物四肢形态的特点 of 哺乳动物按照四肢形态的特点,分为蹠行类、趾 行类和蹄形类 一蹠行类:例如熊和人类,它们与地面接触的包括从 跟骨向前的中后足骨和指骨或趾骨,这说明躯体的 重量全部由脚支撑 远节趾骨 中节趾骨 近节趾骨 跖骨 中间楔骨 内侧楔骨 外侧楔骨 足舟学 散骨 距骨 跟骨 熊 熊掌 置学加 脚掌 足骨上面观
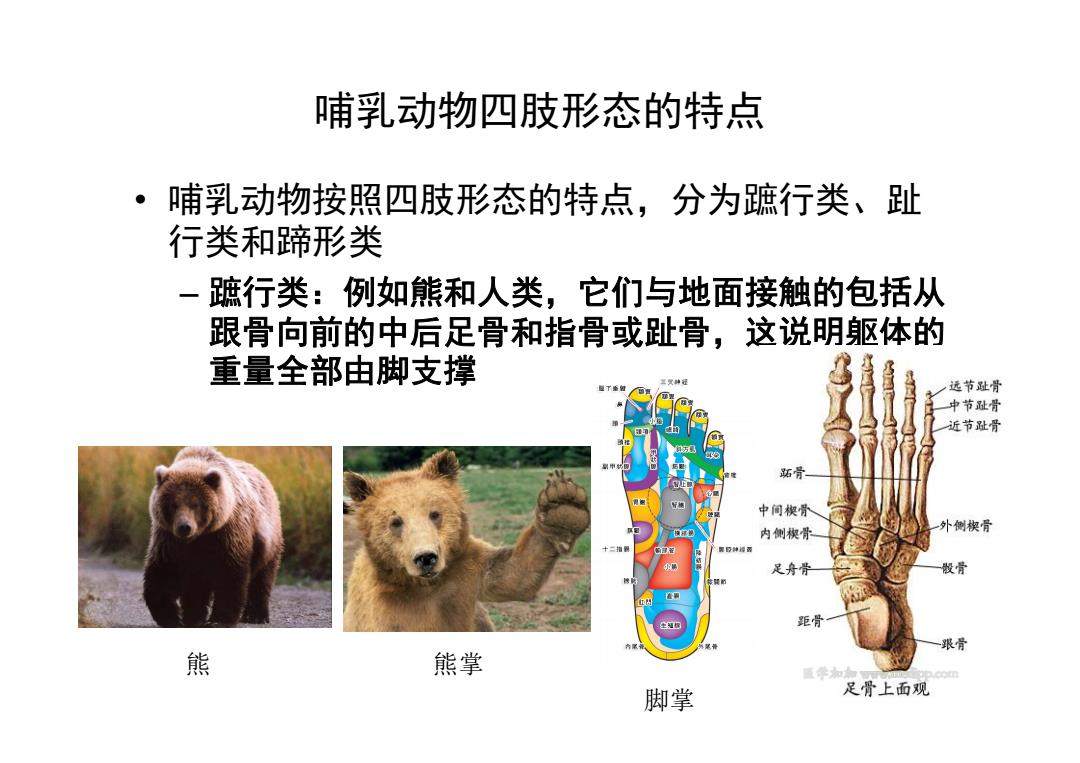
哺乳动物四肢形态的特点 • 哺乳动物按照四肢形态的特点,分为蹠行类、趾 行类和蹄形类 – 蹠行类:例如熊和人类,它们与地面接触的包括从 跟骨向前的中后足骨和指骨或趾骨,这说明躯体的 重量全部由脚支撑 熊 熊掌 脚掌