哈尔滨工业大学工学硕士学位论文 美国的G.Miller博士从1987年开始从事蛇形机器人的研究工作,到目前为止 共设计并制作了S1,S2,S3,S5四代机器人,图1-7为S5。其研究己经达到相当 高的水平,该机器人的特点是:各个关节形状尺寸不同,高度模拟生物蛇,主 要是形态上的高度模拟:为二维结构,无法完成三维空间运动:依靠从动轮而 不是摩擦运动,运动速度很高,主要运动方式为游动。 另外,美国加利福尼亚学院的Chrikjian和Burdick首次从超冗余度机器人 角度,对蛇形机器人的机构和运动理论进行了研究,提出了采用变几何桁架结 构(VGT)作为蛇形机器人的基本构架形式。 1.2.1.3其它国家蛇形机器人的研究 瑞典的Nilsson研制了PIRAIA蛇形机器人。该蛇形机器人采用了特殊的机械 结构,具有很大的关节力矩,能够抬的很高6,1。如图1-8所示。此外,法国的 Bayraktaroglu、意大利的Poi等也进行了各有特色的蛇形机构的研制和控制方法 的研究。 图1-7 G.Miller的S5蛇形机器人 图1-8 Nilsson的蛇形机器人 1.2.2国内研究现状 在我国,蛇形机器人的研究才刚刚起步,虽然在国内也逐渐出现了对蛇形 机器人研究成功的报道,但国内的研究还大多处于探索阶段。哈尔滨工业大学 机器人研究所、上海交通大学等单位首先进行了蛇形机器人仿生方面的一些研 究8,1。上海交通大学于1999年3月研制了我国第一台微小型仿蛇机器人样机 [2,该机构由一系列刚性连杆连接而成,步进电机控制相邻两刚性杆之间的夹 角,使连杆可以在水平面内摆动,样机底面装有滚动轴承作为被动轮,用以改 变纵向和横向摩擦系数之比,其后又相继作了一些相关的理论研究1,22.2001 年,国防科学技术大学研制了一个蛇形机器人样机),如图1-9所示,该样机不 但可以实现平面内运动,而且采用密封外皮后,能在水面上实现蜿蜒运动。但 在技术层面上,还不十分完善。它的执行单元在结构上仿制了日本Hirose的机器 -4-
哈尔滨工业大学工学硕士学位论文 美国的G.Miller博士从 1987 年开始从事蛇形机器人的研究工作,到目前为止 共设计并制作了S1,S2,S3,S5 四代机器人,图 1-7 为S5[15]。其研究已经达到相当 高的水平,该机器人的特点是:各个关节形状尺寸不同,高度模拟生物蛇,主 要是形态上的高度模拟;为二维结构,无法完成三维空间运动;依靠从动轮而 不是摩擦运动,运动速度很高,主要运动方式为游动。 另外,美国加利福尼亚学院的 Chrikjian 和 Burdick 首次从超冗余度机器人 角度,对蛇形机器人的机构和运动理论进行了研究,提出了采用变几何桁架结 构(VGT)作为蛇形机器人的基本构架形式。 1.2.1.3 其它国家蛇形机器人的研究 瑞典的Nilsson研制了PIRAIA蛇形机器人。该蛇形机器人采用了特殊的机械 结构,具有很大的关节力矩,能够抬的很高[16,17]。如图 1-8 所示。此外,法国的 Bayraktaroglu、意大利的Poi等也进行了各有特色的蛇形机构的研制和控制方法 的研究。 图 1-7 G.Miller 的 S5 蛇形机器人 图 1-8 Nilsson 的蛇形机器人 1.2.2 国内研究现状 在我国,蛇形机器人的研究才刚刚起步,虽然在国内也逐渐出现了对蛇形 机器人研究成功的报道,但国内的研究还大多处于探索阶段。哈尔滨工业大学 机器人研究所、上海交通大学等单位首先进行了蛇形机器人仿生方面的一些研 究[18,19]。上海交通大学于 1999 年 3 月研制了我国第一台微小型仿蛇机器人样机 [20],该机构由一系列刚性连杆连接而成,步进电机控制相邻两刚性杆之间的夹 角,使连杆可以在水平面内摆动,样机底面装有滚动轴承作为被动轮,用以改 变纵向和横向摩擦系数之比,其后又相继作了一些相关的理论研究[21,22]。2001 年,国防科学技术大学研制了一个蛇形机器人样机[23],如图 1-9 所示,该样机不 但可以实现平面内运动,而且采用密封外皮后,能在水面上实现蜿蜒运动。但 在技术层面上,还不十分完善。它的执行单元在结构上仿制了日本Hirose的机器 - 4 -
哈尔滨工业大学工学硕士学位论文 蛇结构,在身体下端装有从动轮,以减小身体与地面之间的摩擦,但执行单元 只能采用平行连接方式(电机轴线相互平行),因此只能完成平面内的螺旋运 动,无法进行更深入的研究,这也是它最大的缺点。 中科院沈阳自动化所研究的蛇形机器人是围绕国家863计划研究项目“具 有环境适应能力的蛇形机器人的研究”展开的。研制出了一种新型的蛇形机器 人系统242,如图1-10所示。该蛇行机器人可实现多种适应环境的平面和空间 运动形式,从而为我国星球探测和灾难救援等领域的应用提供技术支持。 苏州大学研制的蛇形机器人如图1-11所示,其主要是对蛇的直线运动的模 拟,并取得了良好的实验效果,但精度稳定性问题还有待进一步研究2刃。此 外,东北大学等高校也己经开始蛇形机器人的相关研究工作,并取得了一定的 成果28.30 图1-9国防科学技术大学研制的蛇形机器人图1-10沈阳自动化所研制的蛇形机器人 图1-11苏州大学研制的蛇形机器人 1.3本课题的主要研究内容 (1)蛇的身体结构及运动形式的研究对蛇的身体结构和运动形式进行研 究,通过对生物蛇的身体结构的研究抽象出骨架模型,从而为仿生蛇的设计提 供指导,通过对运动形式的研究为仿生蛇的运动规划提供依据。 (2)仿生蛇的结构设计通过对生物蛇身体结构的研究,进行仿生蛇的结 构设计,并得出相关的性能参数。 -5-
哈尔滨工业大学工学硕士学位论文 蛇结构,在身体下端装有从动轮,以减小身体与地面之间的摩擦,但执行单元 只能采用平行连接方式(电机轴线相互平行),因此只能完成平面内的螺旋运 动,无法进行更深入的研究,这也是它最大的缺点。 中科院沈阳自动化所研究的蛇形机器人是围绕国家 863 计划研究项目“具 有环境适应能力的蛇形机器人的研究”展开的。研制出了一种新型的蛇形机器 人系统[24-26],,如图 1-10 所示。该蛇行机器人可实现多种适应环境的平面和空间 运动形式,从而为我国星球探测和灾难救援等领域的应用提供技术支持。 苏州大学研制的蛇形机器人如图 1-11 所示,其主要是对蛇的直线运动的模 拟,并取得了良好的实验效果,但精度稳定性问题还有待进一步研究[27]。此 外,东北大学等高校也已经开始蛇形机器人的相关研究工作,并取得了一定的 成果[28-30]。 图 1-9 国防科学技术大学研制的蛇形机器人 图 1-10 沈阳自动化所研制的蛇形机器人 图 1-11 苏州大学研制的蛇形机器人 1.3 本课题的主要研究内容 (1)蛇的身体结构及运动形式的研究 对蛇的身体结构和运动形式进行研 究,通过对生物蛇的身体结构的研究抽象出骨架模型,从而为仿生蛇的设计提 供指导,通过对运动形式的研究为仿生蛇的运动规划提供依据。 (2)仿生蛇的结构设计 通过对生物蛇身体结构的研究,进行仿生蛇的结 构设计,并得出相关的性能参数。 - 5 -
哈尔滨工业大学工学硕士学位论文 (3)仿生蛇的运动规划及控制通过对生物蛇的运动形式的研究,对仿生 蛇的运动形式进行规划,得出关节角度时间函数,并建立仿生蛇的控制系统。 (4)仿生蛇的运动仿真研究运用仿真软件对仿生蛇的各种运动形式进行 运动学和动力学仿真分析,通过运动学仿真去验证步态规划的正确性,通过动 力学仿真验证电机是否满足要求。 -6-
哈尔滨工业大学工学硕士学位论文 - 6 - (3)仿生蛇的运动规划及控制 通过对生物蛇的运动形式的研究,对仿生 蛇的运动形式进行规划,得出关节角度时间函数,并建立仿生蛇的控制系统。 (4)仿生蛇的运动仿真研究 运用仿真软件对仿生蛇的各种运动形式进行 运动学和动力学仿真分析,通过运动学仿真去验证步态规划的正确性,通过动 力学仿真验证电机是否满足要求
哈尔滨工业大学工学硕士学位论文 第2章 仿生蛇的结构设计 仿生蛇的结构设计建立在对自然界生物蛇的身体结构的理论分析之上,通 过对生物蛇的身体结构分析,抽象出其骨骼结构,从而进行仿生蛇的设计。仿 生蛇的结构设计包括身体关节结构、头部关节结构、驱动方案选择、仿生蛇的 整体结构等方面的内容。 2.1蛇的身体结构及运动形式分析 通过对生物蛇的身体结构的分析,抽象出其骨骼结构,为仿生蛇的设计提 供指导:通过对生物蛇的运动形式的分析,得出生物蛇运动过程中身体形状的 变化,从而为仿生蛇的运动规划提供指导。 2.1.1蛇的身体结构分析 蛇是无四肢动物中最庞大的一类,遍布于世界各地,大约有2500多种,分 为盲蛇科、蟒蛇科、游蛇科、蝰蛇科等11个蛇科。广泛的地理分布和悠久的进 化历史,充分证明了这一种群的适应性和运动的优越性。蛇类具有十分独特的 运动方式,它没有足,但靠躯体的摆动可以在地面上快速爬行,蛇类爬行的时 速为1.5公里左右。蛇类能做到这一点是与其独特的身体结构密切相关的。虽然 蛇类分为很多的种类,但是它们的主要身体结构十分的相似。 在长期的进化过程中,蛇类体形的变长是通过它自身脊椎骨数量的增加来 实现的,这样可以保持身体的柔性。通常脊椎骨多达200-400枚。蛇的脊椎骨的 一端有个球形的突起,而另一端有个球形凹陷,这样每根脊椎骨的突起可以和 相邻脊椎骨的凹陷结合形成一个“球铰”,如图2-1所示。球套关节由一系列的 表面形成,产生有限范围的水平和垂直运动。对于大多数蛇,脊骨运动范围为 水平10°~20°,垂直2°~3°。虽然关节的活动范围很小,但由于蛇的脊骨 数量庞大,通过相邻脊骨间微量变化的叠加就可以实现蛇体构型上的很大调 整。 另外,蛇的身体周身覆盖有排列规则的鳞片,其中对运动起重要作用的是 腹部鳞片,如图2-2所示。自然界中的蛇借助于腹鳞与地面的作用力向前运动, 腹鳞的主要特性是蛇在运动时,其法向摩擦系数大于切向摩擦系数,使得蛇在 移动时切向摩擦力很小,提高其运动效率
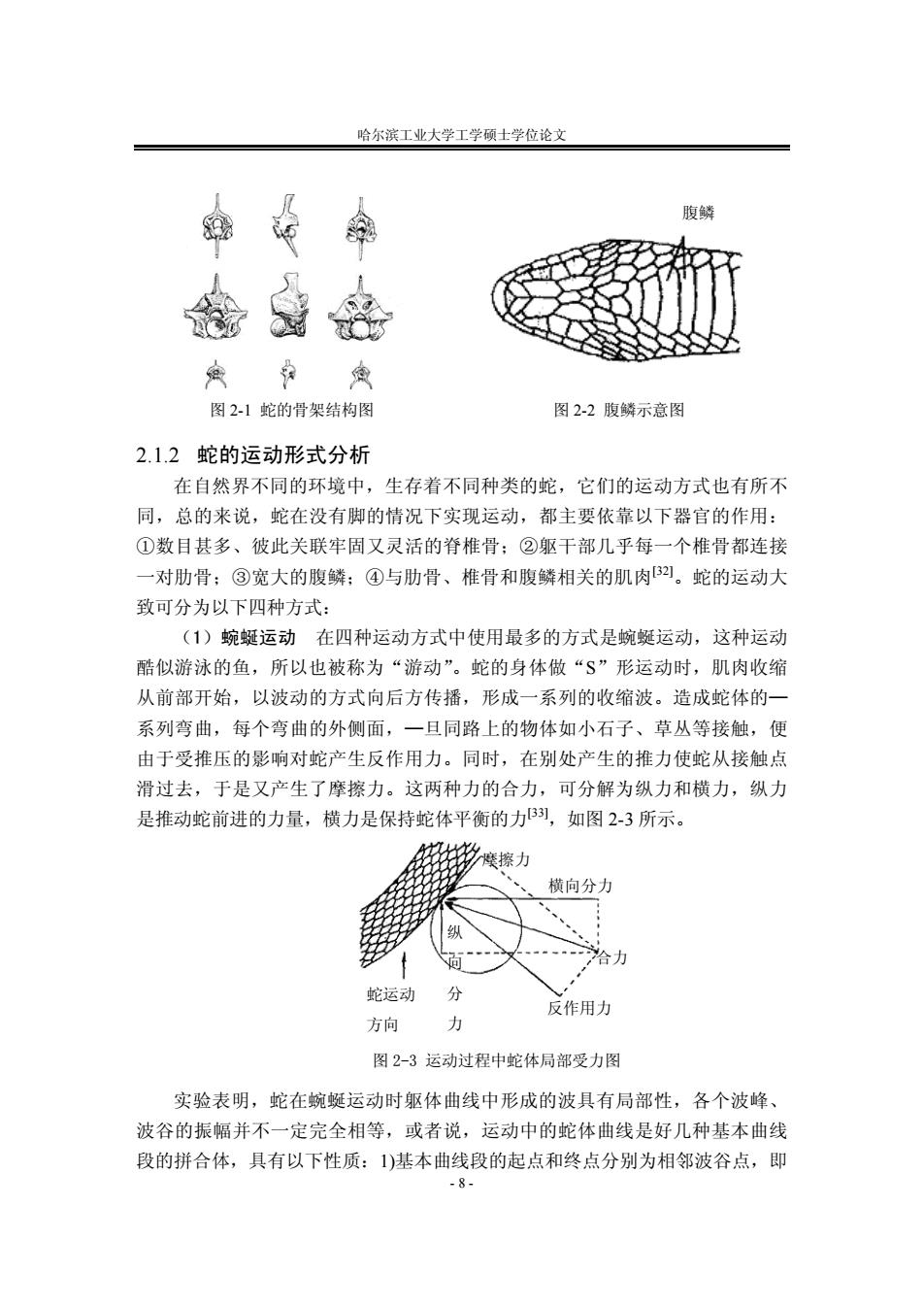
哈尔滨工业大学工学硕士学位论文 - 7 - 第2章 仿生蛇的结构设计 仿生蛇的结构设计建立在对自然界生物蛇的身体结构的理论分析之上,通 过对生物蛇的身体结构分析,抽象出其骨骼结构,从而进行仿生蛇的设计。仿 生蛇的结构设计包括身体关节结构、头部关节结构、驱动方案选择、仿生蛇的 整体结构等方面的内容。 2.1 蛇的身体结构及运动形式分析 通过对生物蛇的身体结构的分析,抽象出其骨骼结构,为仿生蛇的设计提 供指导;通过对生物蛇的运动形式的分析,得出生物蛇运动过程中身体形状的 变化,从而为仿生蛇的运动规划提供指导。 2.1.1 蛇的身体结构分析 蛇是无四肢动物中最庞大的一类,遍布于世界各地,大约有 2500 多种,分 为盲蛇科、蟒蛇科、游蛇科、蝰蛇科等 11 个蛇科。广泛的地理分布和悠久的进 化历史,充分证明了这一种群的适应性和运动的优越性。蛇类具有十分独特的 运动方式,它没有足,但靠躯体的摆动可以在地面上快速爬行,蛇类爬行的时 速为 1.5 公里左右。蛇类能做到这一点是与其独特的身体结构密切相关的。虽然 蛇类分为很多的种类,但是它们的主要身体结构十分的相似[31]。 在长期的进化过程中,蛇类体形的变长是通过它自身脊椎骨数量的增加来 实现的,这样可以保持身体的柔性。通常脊椎骨多达 200-400 枚。蛇的脊椎骨的 一端有个球形的突起,而另一端有个球形凹陷,这样每根脊椎骨的突起可以和 相邻脊椎骨的凹陷结合形成一个“球铰”, 如图 2-1 所示。球套关节由一系列的 表面形成,产生有限范围的水平和垂直运动。对于大多数蛇,脊骨运动范围为 水平 10°~20°,垂直 2°~3°。虽然关节的活动范围很小,但由于蛇的脊骨 数量庞大,通过相邻脊骨间微量变化的叠加就可以实现蛇体构型上的很大调 整。 另外,蛇的身体周身覆盖有排列规则的鳞片,其中对运动起重要作用的是 腹部鳞片,如图 2-2 所示。自然界中的蛇借助于腹鳞与地面的作用力向前运动, 腹鳞的主要特性是蛇在运动时,其法向摩擦系数大于切向摩擦系数,使得蛇在 移动时切向摩擦力很小,提高其运动效率
哈尔滨工业大学工学硕士学位论文 腹鳞 图2-1蛇的骨架结构图 图2-2腹鳞示意图 2.1.2蛇的运动形式分析 在自然界不同的环境中,生存着不同种类的蛇,它们的运动方式也有所不 同,总的来说,蛇在没有脚的情况下实现运动,都主要依靠以下器官的作用: ①数目甚多、彼此关联牢固又灵活的脊椎骨:②躯干部几乎每一个椎骨都连接 一对肋骨;③宽大的腹鳞:④与肋骨、椎骨和腹鳞相关的肌肉2。蛇的运动大 致可分为以下四种方式: (1)蜿蜒运动在四种运动方式中使用最多的方式是蜿蜒运动,这种运动 酷似游泳的鱼,所以也被称为“游动”。蛇的身体做“S”形运动时,肌肉收缩 从前部开始,以波动的方式向后方传播,形成一系列的收缩波。造成蛇体的一 系列弯曲,每个弯曲的外侧面,一旦同路上的物体如小石子、草丛等接触,便 由于受推压的影响对蛇产生反作用力。同时,在别处产生的推力使蛇从接触点 滑过去,于是又产生了摩擦力。这两种力的合力,可分解为纵力和横力,纵力 是推动蛇前进的力量,横力是保持蛇体平衡的力B,如图2-3所示。 摩擦力 横向分力 合力 蛇运动 分 反作用力 方向 力 图2-3运动过程中蛇体局部受力图 实验表明,蛇在蜿蜒运动时躯体曲线中形成的波具有局部性,各个波峰、 波谷的振幅并不一定完全相等,或者说,运动中的蛇体曲线是好几种基本曲线 段的拼合体,具有以下性质:1)基本曲线段的起点和终点分别为相邻波谷点,即 -8-
哈尔滨工业大学工学硕士学位论文 腹鳞 图 2-1 蛇的骨架结构图 图 2-2 腹鳞示意图 2.1.2 蛇的运动形式分析 在自然界不同的环境中,生存着不同种类的蛇,它们的运动方式也有所不 同,总的来说,蛇在没有脚的情况下实现运动,都主要依靠以下器官的作用: ①数目甚多、彼此关联牢固又灵活的脊椎骨;②躯干部几乎每一个椎骨都连接 一对肋骨;③宽大的腹鳞;④与肋骨、椎骨和腹鳞相关的肌肉[32]。蛇的运动大 致可分为以下四种方式: (1)蜿蜒运动 在四种运动方式中使用最多的方式是蜿蜒运动,这种运动 酷似游泳的鱼,所以也被称为“游动”。蛇的身体做“S”形运动时,肌肉收缩 从前部开始,以波动的方式向后方传播,形成一系列的收缩波。造成蛇体的— 系列弯曲,每个弯曲的外侧面,—旦同路上的物体如小石子、草丛等接触,便 由于受推压的影响对蛇产生反作用力。同时,在别处产生的推力使蛇从接触点 滑过去,于是又产生了摩擦力。这两种力的合力,可分解为纵力和横力,纵力 是推动蛇前进的力量,横力是保持蛇体平衡的力[33],如图 2-3 所示。 横向分力 合力 反作用力 纵 向 分 力 蛇运动 方向 图 2-3 运动过程中蛇体局部受力图 摩擦力 实验表明,蛇在蜿蜒运动时躯体曲线中形成的波具有局部性,各个波峰、 波谷的振幅并不一定完全相等,或者说,运动中的蛇体曲线是好几种基本曲线 段的拼合体,具有以下性质:1)基本曲线段的起点和终点分别为相邻波谷点,即 - 8 -