哈尔滨工业大学工程硕士学位论文 的设计提供了有力的指导和支持。其中学校下属的爱生公司研制的ASN-211,是 一款比较成熟的扑翼样机,该机的扑翼采用传统的平面连杆机构驱动,重220g, 翼展60cm,航速6-10m/s。其扑翼是采用鸟类翼型的上表面弧线设计而成的仿生 薄片翼。该机在2010年的珠海航展上展出,是一种具有自主巡航能力的飞行器, 如图1-12所示。 图1-11南京航空航天大学的仿生机械鸟 图1-12西北工业大学的ASN-211 哈尔滨工业大学深圳研究生院从2004年开始,在周超英[434教授的带领下, 建立计算机数值模拟实验室,基于计算流体力学理论,展开对扑翼的升力机理、 柔性翼的空气动力学以及昆虫在低雷诺数下的飞行机理等方面研究,得出大量的 理论成果。这些理论成果在世界上也处于先进水平,对扑翼样机的研发有很大的 指导作用。样机的研发工作从2009年开始,如图1-13所示,经过两年的时间,设计 出首款翼展28cm,重19.2g的微型扑翼样机,该样机于2011年12月完成无控制试飞。 扑翼飞行的姿态控制是个难点,未来的研究除了在开发新型小尺寸样机之外,对 控制技术也展开研究。 图1-13哈工大深研院研制的微型扑翼飞行器
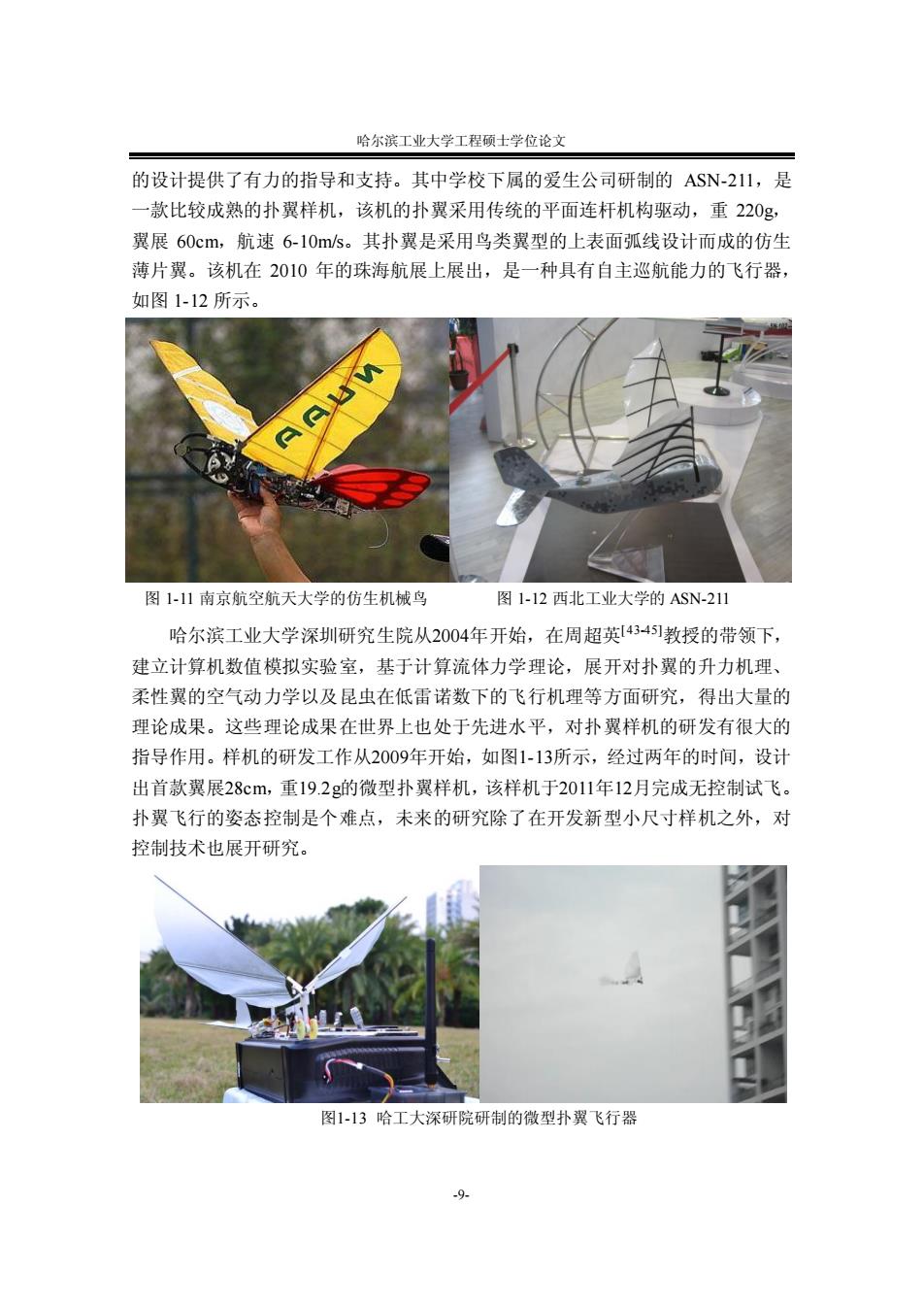
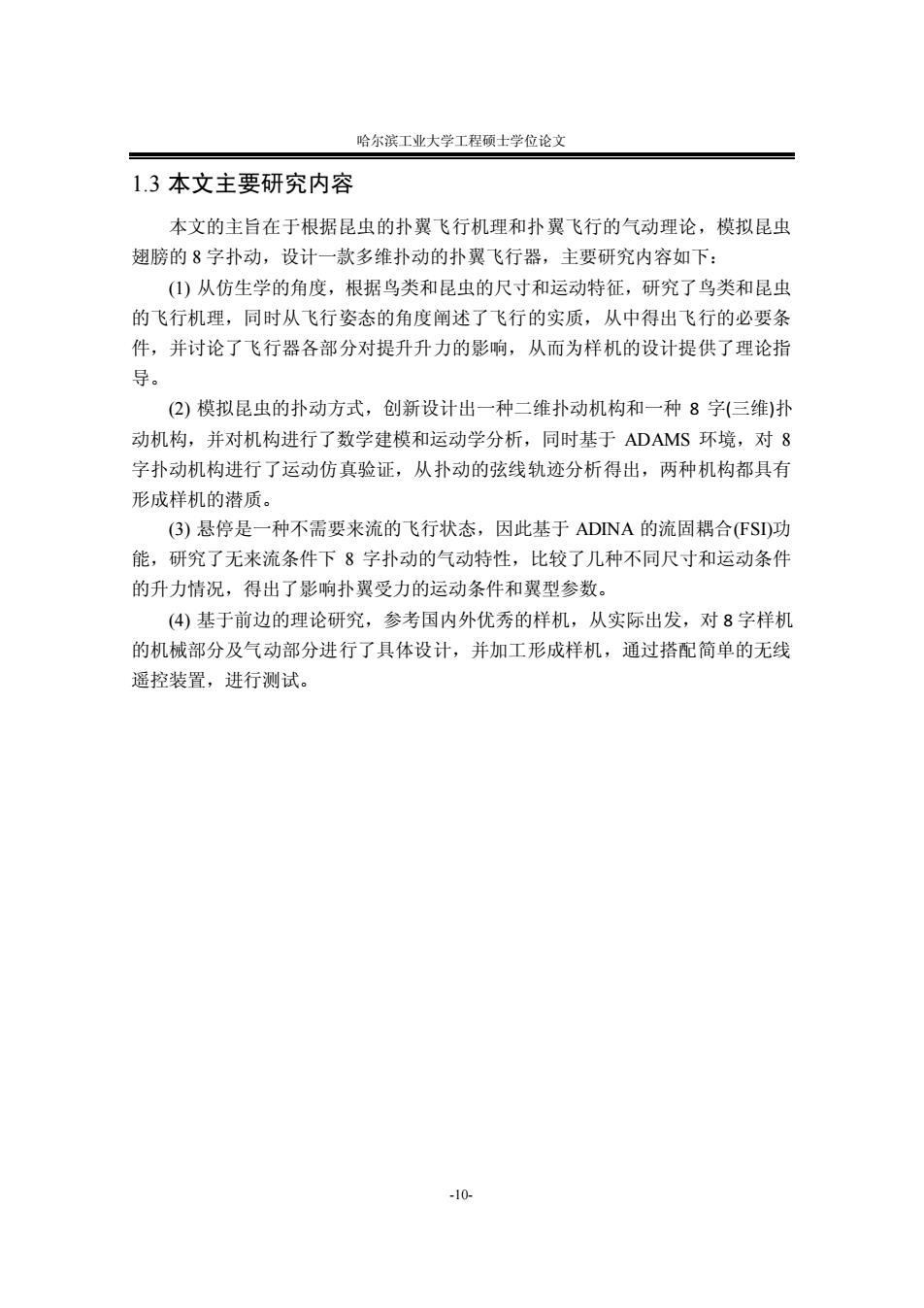
哈尔滨工业大学工程硕士学位论文 -9- 的设计提供了有力的指导和支持。其中学校下属的爱生公司研制的 ASN-211,是 一款比较成熟的扑翼样机,该机的扑翼采用传统的平面连杆机构驱动,重 220g, 翼展 60cm,航速 6-10m/s。其扑翼是采用鸟类翼型的上表面弧线设计而成的仿生 薄片翼。该机在 2010 年的珠海航展上展出,是一种具有自主巡航能力的飞行器, 如图 1-12 所示。 图 1-11 南京航空航天大学的仿生机械鸟 图 1-12 西北工业大学的 ASN-211 哈尔滨工业大学深圳研究生院从2004年开始,在周超英[43-45]教授的带领下, 建立计算机数值模拟实验室,基于计算流体力学理论,展开对扑翼的升力机理、 柔性翼的空气动力学以及昆虫在低雷诺数下的飞行机理等方面研究,得出大量的 理论成果。这些理论成果在世界上也处于先进水平,对扑翼样机的研发有很大的 指导作用。样机的研发工作从2009年开始,如图1-13所示,经过两年的时间,设计 出首款翼展28cm,重19.2g的微型扑翼样机,该样机于2011年12月完成无控制试飞。 扑翼飞行的姿态控制是个难点,未来的研究除了在开发新型小尺寸样机之外,对 控制技术也展开研究。 图1-13 哈工大深研院研制的微型扑翼飞行器
哈尔滨工业大学工程硕士学位论文 1.3本文主要研究内容 本文的主旨在于根据昆虫的扑翼飞行机理和扑翼飞行的气动理论,模拟昆虫 翅膀的8字扑动,设计一款多维扑动的扑翼飞行器,主要研究内容如下: (1)从仿生学的角度,根据鸟类和昆虫的尺寸和运动特征,研究了鸟类和昆虫 的飞行机理,同时从飞行姿态的角度阐述了飞行的实质,从中得出飞行的必要条 件,并讨论了飞行器各部分对提升升力的影响,从而为样机的设计提供了理论指 导。 (2)模拟昆虫的扑动方式,创新设计出一种二维扑动机构和一种8字(三维)扑 动机构,并对机构进行了数学建模和运动学分析,同时基于ADAMS环境,对8 字扑动机构进行了运动仿真验证,从扑动的弦线轨迹分析得出,两种机构都具有 形成样机的潜质。 (3)悬停是一种不需要来流的飞行状态,因此基于ADNA的流固耦合(FSI)功 能,研究了无来流条件下8字扑动的气动特性,比较了几种不同尺寸和运动条件 的升力情况,得出了影响扑翼受力的运动条件和翼型参数。 (4)基于前边的理论研究,参考国内外优秀的样机,从实际出发,对8字样机 的机械部分及气动部分进行了具体设计,并加工形成样机,通过搭配简单的无线 遥控装置,进行测试。 -10-
哈尔滨工业大学工程硕士学位论文 -10- 1.3 本文主要研究内容 本文的主旨在于根据昆虫的扑翼飞行机理和扑翼飞行的气动理论,模拟昆虫 翅膀的 8 字扑动,设计一款多维扑动的扑翼飞行器,主要研究内容如下: (1) 从仿生学的角度,根据鸟类和昆虫的尺寸和运动特征,研究了鸟类和昆虫 的飞行机理,同时从飞行姿态的角度阐述了飞行的实质,从中得出飞行的必要条 件,并讨论了飞行器各部分对提升升力的影响,从而为样机的设计提供了理论指 导。 (2) 模拟昆虫的扑动方式,创新设计出一种二维扑动机构和一种 8 字(三维)扑 动机构,并对机构进行了数学建模和运动学分析,同时基于 ADAMS 环境,对 8 字扑动机构进行了运动仿真验证,从扑动的弦线轨迹分析得出,两种机构都具有 形成样机的潜质。 (3) 悬停是一种不需要来流的飞行状态,因此基于 ADINA 的流固耦合(FSI)功 能,研究了无来流条件下 8 字扑动的气动特性,比较了几种不同尺寸和运动条件 的升力情况,得出了影响扑翼受力的运动条件和翼型参数。 (4) 基于前边的理论研究,参考国内外优秀的样机,从实际出发,对 8 字样机 的机械部分及气动部分进行了具体设计,并加工形成样机,通过搭配简单的无线 遥控装置,进行测试
哈尔滨工业大学工程硕士学位论文 第2章扑翼飞行机理分析 鸟类和昆虫在长期的进化过程中,形成了其独特的组织特征,这些特征使它 们可以很好的完成各种复杂的飞行任务。生物翅膀的特殊材质,有助于鸟类和昆 虫的飞行,但是对升力的贡献不是主要的,而且某种程度上是可以复制的。同时, 在固定翼的空气动力学中,也提供了一个直观的现象,就是如果机翼配置合适, 只要有足够的推力维持足够速度的来流,飞机就能够飞行。而与固定翼飞机不同 的是,鸟类和昆虫的推进和举升都是由翅膀扑动完成。因此,鸟类和昆虫翅膀的 运动成为研究扑翼飞行过程中的关键问题。近百年来,学者们致力于通过研究鸟 类和昆虫翅膀的运动轨迹、扑动频率、翅膀附近流场特性以及翅膀尺度等问题来 揭示扑翼飞行的原理。本章主要从运动特征和气动特性两方面来说明。 此外,固定翼飞机的产生是利用鸟类滑翔的原理,并且经过上百年的发展, 固定翼飞行的空气动力学也已经趋于成熟。在研究扑翼飞行的过程中发现,这些 原本受鸟类启发而发展成熟的理论,反过来也可以解释鸟类飞行的某些关键问题, 这是以往学者们在研究过程中所忽略的。本章将会在鸟类飞行机理和飞行姿态部 分进行相应的阐述。 本章的研究主要针对双翅的情况,蜻蜓的前后扑翼和共轴四翼这些四翅的情 况,具有特殊的空气动力特性,本文不做讨论。 2.1鸟类飞行机理的分析 2.1.1鸟类翅膀的运动特征 鸟类翅膀最大的特点就是可以折叠,这是因为鸟类独有的灵活的关节和可以 开合的羽毛。这些特征可以使鸟类在不同的飞行状态得到不同的翼展面积。鸟类 翅膀的结构如图2-1所示,其中桨形羽可以收拢和展开,对飞行影响最大。桨形羽 又分为初级飞羽和次级飞羽,初级飞羽又叫初级拨风羽,主要产生推力,在翅膀 扑动的过程中,初级飞羽做大幅度的扭转运动,同时带动次级飞羽做小角度的扭 转。次级飞羽段与前缘合起来,相当于固定翼飞机的机翼,主要产生升力。 鸟类翅膀的扑动基本上分为下扑和上扑两个阶段,同时在扑动的过程中,还 伴随着翅膀的折叠收拢和展开。 ()下扑阶段:在下扑过程中,翅膀展开至最大面积,从最高点下扑至最低点, 翅膀基本上保持展开状态。这一阶段占用一个扑动周期的大部分时间,是提供升 力的主要阶段: -11-
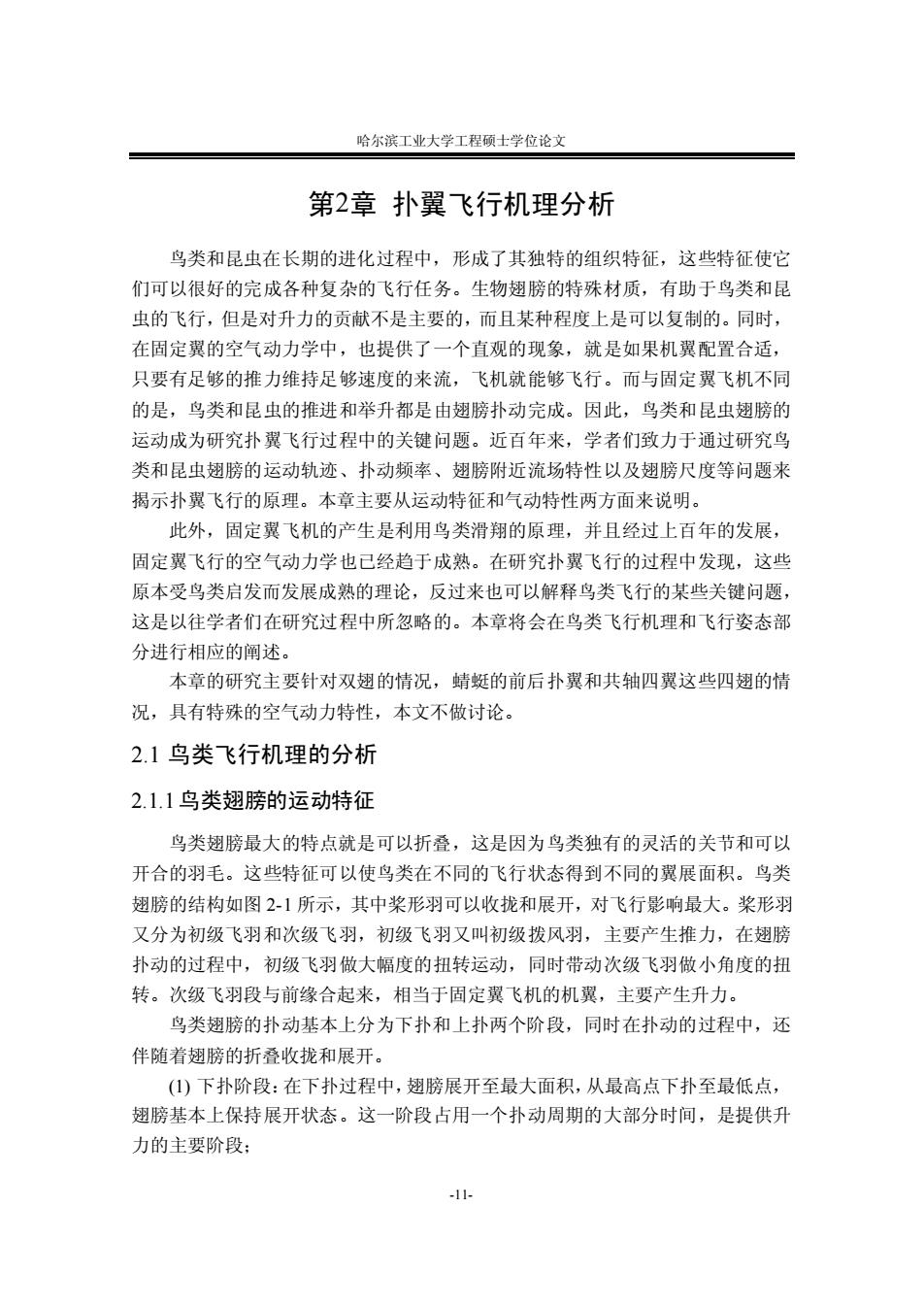
哈尔滨工业大学工程硕士学位论文 -11- 第2章 扑翼飞行机理分析 鸟类和昆虫在长期的进化过程中,形成了其独特的组织特征,这些特征使它 们可以很好的完成各种复杂的飞行任务。生物翅膀的特殊材质,有助于鸟类和昆 虫的飞行,但是对升力的贡献不是主要的,而且某种程度上是可以复制的。同时, 在固定翼的空气动力学中,也提供了一个直观的现象,就是如果机翼配置合适, 只要有足够的推力维持足够速度的来流,飞机就能够飞行。而与固定翼飞机不同 的是,鸟类和昆虫的推进和举升都是由翅膀扑动完成。因此,鸟类和昆虫翅膀的 运动成为研究扑翼飞行过程中的关键问题。近百年来,学者们致力于通过研究鸟 类和昆虫翅膀的运动轨迹、扑动频率、翅膀附近流场特性以及翅膀尺度等问题来 揭示扑翼飞行的原理。本章主要从运动特征和气动特性两方面来说明。 此外,固定翼飞机的产生是利用鸟类滑翔的原理,并且经过上百年的发展, 固定翼飞行的空气动力学也已经趋于成熟。在研究扑翼飞行的过程中发现,这些 原本受鸟类启发而发展成熟的理论,反过来也可以解释鸟类飞行的某些关键问题, 这是以往学者们在研究过程中所忽略的。本章将会在鸟类飞行机理和飞行姿态部 分进行相应的阐述。 本章的研究主要针对双翅的情况,蜻蜓的前后扑翼和共轴四翼这些四翅的情 况,具有特殊的空气动力特性,本文不做讨论。 2.1 鸟类飞行机理的分析 2.1.1鸟类翅膀的运动特征 鸟类翅膀最大的特点就是可以折叠,这是因为鸟类独有的灵活的关节和可以 开合的羽毛。这些特征可以使鸟类在不同的飞行状态得到不同的翼展面积。鸟类 翅膀的结构如图 2-1 所示,其中桨形羽可以收拢和展开,对飞行影响最大。桨形羽 又分为初级飞羽和次级飞羽,初级飞羽又叫初级拨风羽,主要产生推力,在翅膀 扑动的过程中,初级飞羽做大幅度的扭转运动,同时带动次级飞羽做小角度的扭 转。次级飞羽段与前缘合起来,相当于固定翼飞机的机翼,主要产生升力。 鸟类翅膀的扑动基本上分为下扑和上扑两个阶段,同时在扑动的过程中,还 伴随着翅膀的折叠收拢和展开。 (1) 下扑阶段:在下扑过程中,翅膀展开至最大面积,从最高点下扑至最低点, 翅膀基本上保持展开状态。这一阶段占用一个扑动周期的大部分时间,是提供升 力的主要阶段;
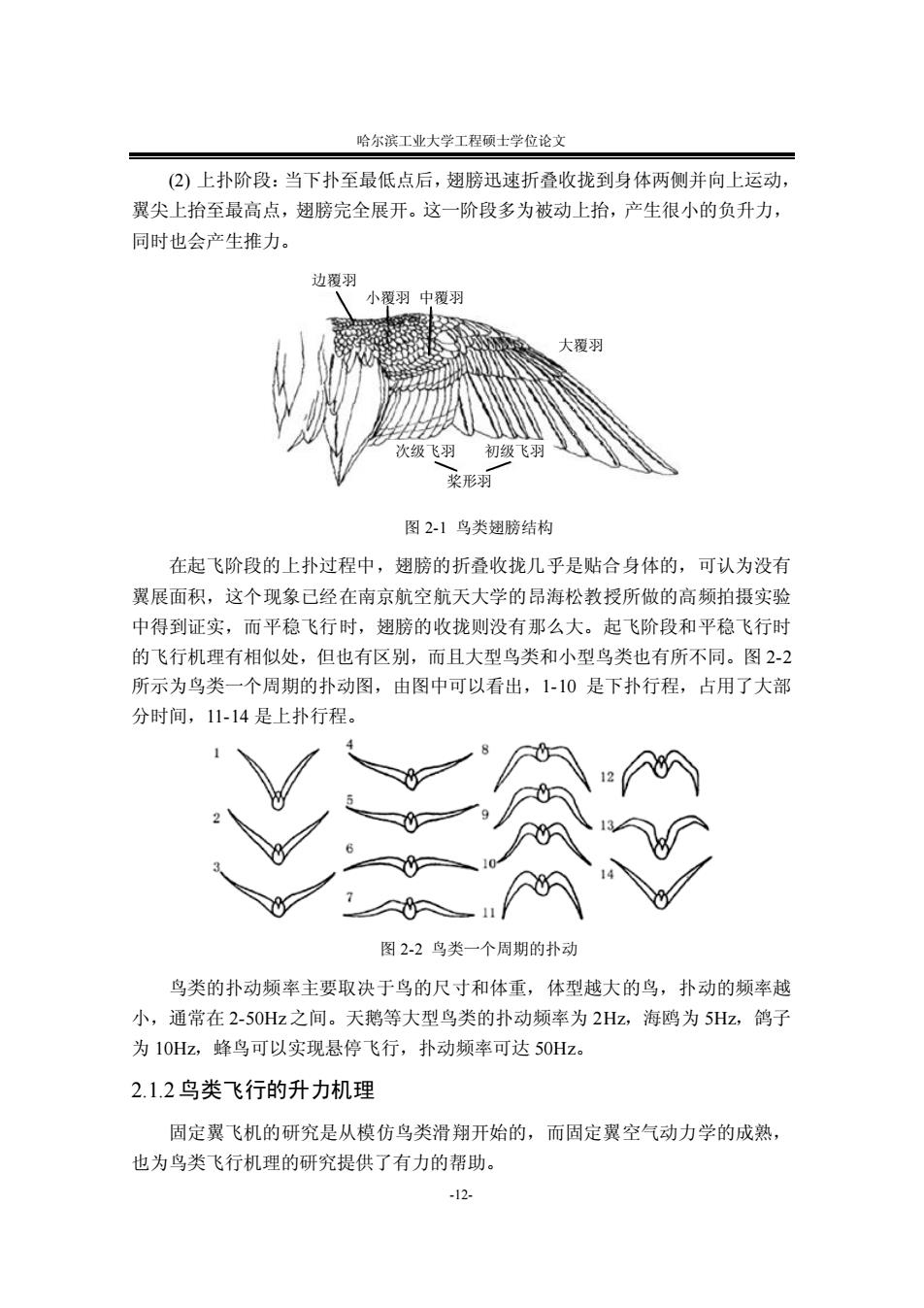
哈尔滨工业大学工程硕士学位论文 (2)上扑阶段:当下扑至最低点后,翅膀迅速折叠收拢到身体两侧并向上运动, 翼尖上抬至最高点,翅膀完全展开。这一阶段多为被动上抬,产生很小的负升力, 同时也会产生推力。 边覆羽 小覆羽中覆羽 大覆羽 次级飞羽 初级飞羽 桨形羽 图2-1鸟类翅膀结构 在起飞阶段的上扑过程中,翅膀的折叠收拢几乎是贴合身体的,可认为没有 翼展面积,这个现象己经在南京航空航天大学的昂海松教授所做的高频拍摄实验 中得到证实,而平稳飞行时,翅膀的收拢则没有那么大。起飞阶段和平稳飞行时 的飞行机理有相似处,但也有区别,而且大型鸟类和小型鸟类也有所不同。图2-2 所示为鸟类一个周期的扑动图,由图中可以看出,1-10是下扑行程,占用了大部 分时间,11-14是上扑行程。 人 图2-2鸟类一个周期的扑动 鸟类的扑动频率主要取决于鸟的尺寸和体重,体型越大的鸟,扑动的频率越 小,通常在2-50Hz之间。天鹅等大型鸟类的扑动频率为2Hz,海鸥为5Hz,鸽子 为10Hz,蜂鸟可以实现悬停飞行,扑动频率可达50Hz。 2.1.2鸟类飞行的升力机理 固定翼飞机的研究是从模仿鸟类滑翔开始的,而固定翼空气动力学的成熟, 也为鸟类飞行机理的研究提供了有力的帮助。 -12-
哈尔滨工业大学工程硕士学位论文 -12- (2) 上扑阶段:当下扑至最低点后,翅膀迅速折叠收拢到身体两侧并向上运动, 翼尖上抬至最高点,翅膀完全展开。这一阶段多为被动上抬,产生很小的负升力, 同时也会产生推力。 次级飞羽 初级飞羽 桨形羽 大覆羽 小覆羽 中覆羽 边覆羽 图 2-1 鸟类翅膀结构 在起飞阶段的上扑过程中,翅膀的折叠收拢几乎是贴合身体的,可认为没有 翼展面积,这个现象已经在南京航空航天大学的昂海松教授所做的高频拍摄实验 中得到证实,而平稳飞行时,翅膀的收拢则没有那么大。起飞阶段和平稳飞行时 的飞行机理有相似处,但也有区别,而且大型鸟类和小型鸟类也有所不同。图 2-2 所示为鸟类一个周期的扑动图,由图中可以看出,1-10 是下扑行程,占用了大部 分时间,11-14 是上扑行程。 图 2-2 鸟类一个周期的扑动 鸟类的扑动频率主要取决于鸟的尺寸和体重,体型越大的鸟,扑动的频率越 小,通常在 2-50Hz 之间。天鹅等大型鸟类的扑动频率为 2Hz,海鸥为 5Hz,鸽子 为 10Hz,蜂鸟可以实现悬停飞行,扑动频率可达 50Hz。 2.1.2鸟类飞行的升力机理 固定翼飞机的研究是从模仿鸟类滑翔开始的,而固定翼空气动力学的成熟, 也为鸟类飞行机理的研究提供了有力的帮助
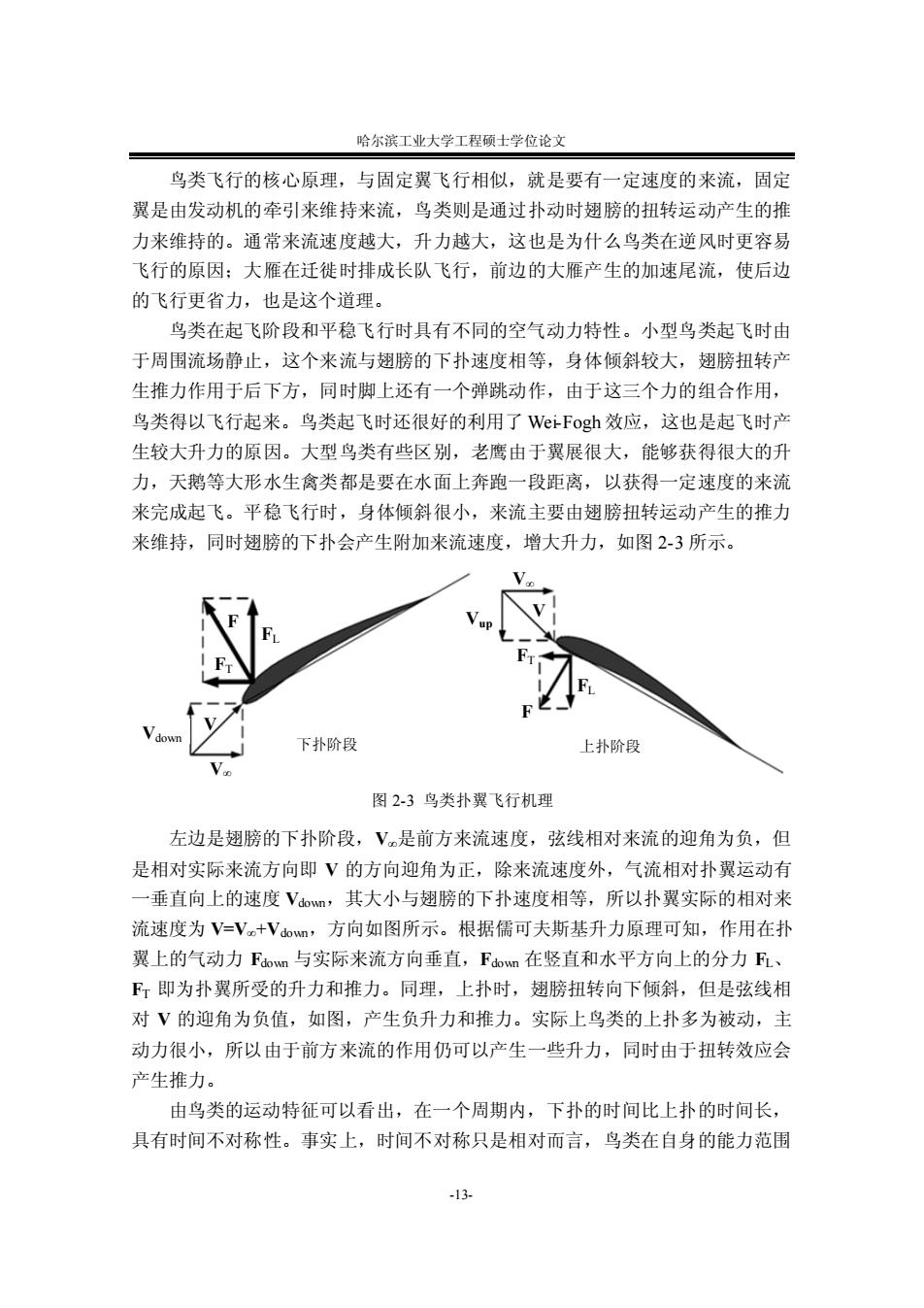
哈尔滨工业大学工程硕士学位论文 鸟类飞行的核心原理,与固定翼飞行相似,就是要有一定速度的来流,固定 翼是由发动机的牵引来维持来流,鸟类则是通过扑动时翅膀的扭转运动产生的推 力来维持的。通常来流速度越大,升力越大,这也是为什么鸟类在逆风时更容易 飞行的原因:大雁在迁徙时排成长队飞行,前边的大雁产生的加速尾流,使后边 的飞行更省力,也是这个道理。 鸟类在起飞阶段和平稳飞行时具有不同的空气动力特性。小型鸟类起飞时由 于周围流场静止,这个来流与翅膀的下扑速度相等,身体倾斜较大,翅膀扭转产 生推力作用于后下方,同时脚上还有一个弹跳动作,由于这三个力的组合作用, 鸟类得以飞行起来。鸟类起飞时还很好的利用了Wei-Fogh效应,这也是起飞时产 生较大升力的原因。大型鸟类有些区别,老鹰由于翼展很大,能够获得很大的升 力,天鹅等大形水生禽类都是要在水面上奔跑一段距离,以获得一定速度的来流 来完成起飞。平稳飞行时,身体倾斜很小,来流主要由翅膀扭转运动产生的推力 来维持,同时翅膀的下扑会产生附加来流速度,增大升力,如图2-3所示。 下扑阶段 上扑阶段 图2-3鸟类扑翼飞行机理 左边是翅膀的下扑阶段,V是前方来流速度,弦线相对来流的迎角为负,但 是相对实际来流方向即V的方向迎角为正,除来流速度外,气流相对扑翼运动有 垂直向上的速度Vom,其大小与翅膀的下扑速度相等,所以扑翼实际的相对来 流速度为V=V+Vom,方向如图所示。根据儒可夫斯基升力原理可知,作用在扑 翼上的气动力Fom与实际来流方向垂直,Fdom在竖直和水平方向上的分力FL、 FT即为扑翼所受的升力和推力。同理,上扑时,翅膀扭转向下倾斜,但是弦线相 对V的迎角为负值,如图,产生负升力和推力。实际上鸟类的上扑多为被动,主 动力很小,所以由于前方来流的作用仍可以产生一些升力,同时由于扭转效应会 产生推力。 由鸟类的运动特征可以看出,在一个周期内,下扑的时间比上扑的时间长, 具有时间不对称性。事实上,时间不对称只是相对而言,鸟类在自身的能力范围 -13-
哈尔滨工业大学工程硕士学位论文 -13- 鸟类飞行的核心原理,与固定翼飞行相似,就是要有一定速度的来流,固定 翼是由发动机的牵引来维持来流,鸟类则是通过扑动时翅膀的扭转运动产生的推 力来维持的。通常来流速度越大,升力越大,这也是为什么鸟类在逆风时更容易 飞行的原因;大雁在迁徙时排成长队飞行,前边的大雁产生的加速尾流,使后边 的飞行更省力,也是这个道理。 鸟类在起飞阶段和平稳飞行时具有不同的空气动力特性。小型鸟类起飞时由 于周围流场静止,这个来流与翅膀的下扑速度相等,身体倾斜较大,翅膀扭转产 生推力作用于后下方,同时脚上还有一个弹跳动作,由于这三个力的组合作用, 鸟类得以飞行起来。鸟类起飞时还很好的利用了 Wei-Fogh 效应,这也是起飞时产 生较大升力的原因。大型鸟类有些区别,老鹰由于翼展很大,能够获得很大的升 力,天鹅等大形水生禽类都是要在水面上奔跑一段距离,以获得一定速度的来流 来完成起飞。平稳飞行时,身体倾斜很小,来流主要由翅膀扭转运动产生的推力 来维持,同时翅膀的下扑会产生附加来流速度,增大升力,如图 2-3 所示。 下扑阶段 上扑阶段 V∞ V V∞ V FT FL F F FT FL Vup Vdown 图 2-3 鸟类扑翼飞行机理 左边是翅膀的下扑阶段,V∞是前方来流速度,弦线相对来流的迎角为负,但 是相对实际来流方向即 V 的方向迎角为正,除来流速度外,气流相对扑翼运动有 一垂直向上的速度 Vdown,其大小与翅膀的下扑速度相等,所以扑翼实际的相对来 流速度为 V=V∞+Vdown,方向如图所示。根据儒可夫斯基升力原理可知,作用在扑 翼上的气动力 Fdown 与实际来流方向垂直,Fdown 在竖直和水平方向上的分力 FL、 FT 即为扑翼所受的升力和推力。同理,上扑时,翅膀扭转向下倾斜,但是弦线相 对 V 的迎角为负值,如图,产生负升力和推力。实际上鸟类的上扑多为被动,主 动力很小,所以由于前方来流的作用仍可以产生一些升力,同时由于扭转效应会 产生推力。 由鸟类的运动特征可以看出,在一个周期内,下扑的时间比上扑的时间长, 具有时间不对称性。事实上,时间不对称只是相对而言,鸟类在自身的能力范围