哈尔滨工业大学工程硕士学位论文 中转。扑翼飞行器即可做一个小型的飞行式中继站,来完成信号的中转放大。同 样,扑翼飞行器可以实现很好的潜入实施电子干扰,功率不足可以通过增加飞行 器的数量来弥补。在一些特种作战环境下,人们无法直接进入,比如说核环境、 生化环境以及一些建筑物的内部,扑翼飞行器则可以轻松的进入,并且可以较长 时间的停留进行采样、监测和引导等任务。 在民用领域,扑翼飞行器也具有广泛的用途,比如环境监测、航空测绘、农 业勘测、灾情监测、道路监控、野外搜救、城区监视和机场驱鸟等 扑翼飞行器的设计,是一个多学科交叉的研究过程。其研制不仅会助推扑翼 空气动力学的发展,还涉及到许多相关领域的关键技术6),例如新型材料、部件 微型化、微型动力源、自主控制及数据通信等。扑翼飞行器在研究中对尺寸和质 量做了规定,这要求除了采用新型轻质材料,还要使机载控制部件如控制板、制 动器、陀螺仪、摄像头等在满足要求的情况下不断缩小尺寸。目前已有学者采用 电热记忆材料进行折叠翼的研究1],在微电机领域,出现了尺寸更小重量更轻的 直线电机,输出端输出往复的直线运动,适合研究尺寸更小的微扑翼飞行器。 扑翼飞行器是微型侦察机发展的新趋势,对新技术和气动理论的发展都有巨 大的推动作用,其研制不论在军事还是在民用领域,都具有重要的战略意义。 1.2国内外的研究现状 自从上世纪九十年代提出微型飞行器的概念之后,美国、德国、荷兰、日本、 印度、以色列等国家都相继成立了专项研究机构,投入大量科研经费,开展微型 飞行器及相关技术的研究,并且都取得了不小的成果18,1]。起初的研究重点主要 放在了固定翼和旋翼飞行器上,随着样机尺寸的越来越小,扑翼开始受到重视并 迅速发展。美国由于DARPA、NASA以及军方的资助,与大学、科研机构以及公 司合作研发,发展最快。我国的研究主要在一些高校进行,也都有可飞行的记录, 在样机研究和气动理论方面都相应的取得了不少成果。 1.2.1国外研究现状 扑翼样机的出现基本上都是上世纪90年代开始的,这是由工业技术和扑翼空 气动力学的发展水平决定的。其中有一些国家还进行了载人扑翼的研究,加拿大 多伦多大学研制的载人扑翼机,在1991年进行了该机14模型概念机的试飞,并 取得成功,美国FI组织认为这是第一次遥控机械驱动扑翼机的成功飞行202。 此后随着微型飞行器概念的提出,各国纷纷展开了小尺寸扑翼的研究
哈尔滨工业大学工程硕士学位论文 -4- 中转。扑翼飞行器即可做一个小型的飞行式中继站,来完成信号的中转放大。同 样,扑翼飞行器可以实现很好的潜入实施电子干扰,功率不足可以通过增加飞行 器的数量来弥补。在一些特种作战环境下,人们无法直接进入,比如说核环境、 生化环境以及一些建筑物的内部,扑翼飞行器则可以轻松的进入,并且可以较长 时间的停留进行采样、监测和引导等任务。 在民用领域,扑翼飞行器也具有广泛的用途,比如环境监测、航空测绘、农 业勘测、灾情监测、道路监控、野外搜救、城区监视和机场驱鸟等[15]。 扑翼飞行器的设计,是一个多学科交叉的研究过程。其研制不仅会助推扑翼 空气动力学的发展,还涉及到许多相关领域的关键技术[16],例如新型材料、部件 微型化、微型动力源、自主控制及数据通信等。扑翼飞行器在研究中对尺寸和质 量做了规定,这要求除了采用新型轻质材料,还要使机载控制部件如控制板、制 动器、陀螺仪、摄像头等在满足要求的情况下不断缩小尺寸。目前已有学者采用 电热记忆材料进行折叠翼的研究[17],在微电机领域,出现了尺寸更小重量更轻的 直线电机,输出端输出往复的直线运动,适合研究尺寸更小的微扑翼飞行器。 扑翼飞行器是微型侦察机发展的新趋势,对新技术和气动理论的发展都有巨 大的推动作用,其研制不论在军事还是在民用领域,都具有重要的战略意义。 1.2 国内外的研究现状 自从上世纪九十年代提出微型飞行器的概念之后,美国、德国、荷兰、日本、 印度、以色列等国家都相继成立了专项研究机构,投入大量科研经费,开展微型 飞行器及相关技术的研究,并且都取得了不小的成果[ 18,19]。起初的研究重点主要 放在了固定翼和旋翼飞行器上,随着样机尺寸的越来越小,扑翼开始受到重视并 迅速发展。美国由于 DARPA、NASA 以及军方的资助,与大学、科研机构以及公 司合作研发,发展最快。我国的研究主要在一些高校进行,也都有可飞行的记录, 在样机研究和气动理论方面都相应的取得了不少成果。 1.2.1 国外研究现状 扑翼样机的出现基本上都是上世纪 90 年代开始的,这是由工业技术和扑翼空 气动力学的发展水平决定的。其中有一些国家还进行了载人扑翼的研究,加拿大 多伦多大学研制的载人扑翼机,在 1991 年进行了该机 1/4 模型概念机的试飞,并 取得成功,美国 FAI 组织认为这是第一次遥控机械驱动扑翼机的成功飞行[20,21]。 此后随着微型飞行器概念的提出,各国纷纷展开了小尺寸扑翼的研究

哈尔滨工业大学工程硕士学位论文 1.2.1.1美国的研究现状 新兴技术的发展,美国一直走在世界的前列。由于重量和动力源的限制,其 中一些样机采用一些特殊的驱动方式。有代表性的如图1-4所示。图中)为美国乔 治亚理工大学研制的微型飞行器Entomopter22,2。它有的两对机翼,使用往复式化 学肌肉(RCM,Reciprocating Chemical Muscle)驱动。 a)乔治亚理工大学的Entomopter b)斯坦福研究中心的Mentor c)UC Berkeley研制的MFI d)Vanderbilt大学的CM 图1-4采用特殊驱动方式的扑翼样机 Entomopter的每一部分设计都具独特性,例如尾部的天线可以增加飞行器的平 衡,腿部可以在地面行走同时兼作燃料箱,还可以增大转动惯量以增加了横滚的 稳定性。研究者还期望它能在未来火星探测中发挥重要作用24.b)是在美国DARPA 的资助下,斯坦福研究中心(SI)和加拿大多伦多大学共同研制的微型扑翼飞行器 Mentor2],采用电致伸缩人造肌肉(EPAM)为动力,它是利用Wei-Fogh机制飞行的 多扑翼飞行器,可以实现前飞和悬停。c)是美国加州大学伯克利分校研制的微机械 飞虫MF26,采用压电石英驱动扑翼振动,尺寸1025mm,重量仅43mg。只能作 短暂的无控制飞行。d)是Vanderbilt大学的CM2)],利用压电原理驱动机翼翼展为 15cm,动力系统由锂电池供电。 此外有代表性的是加州理工学院的Microbat28),它是一个仿鸟的扑翼飞行器, 形式上已经接近近期的扑翼机,其驱动采用的是机械连杆机构,姿态通过平尾和 垂尾控制。该机在第一次试飞时只飞行了9秒,几经改进之后,在2002年8月成 功飞行25分钟,创造了当时扑翼飞行的世界记录。 -5-
哈尔滨工业大学工程硕士学位论文 -5- 1.2.1.1 美国的研究现状 新兴技术的发展,美国一直走在世界的前列。由于重量和动力源的限制,其 中一些样机采用一些特殊的驱动方式。有代表性的如图 1-4 所示。图中 a)为美国乔 治亚理工大学研制的微型飞行器 Entomopter[22,23]。它有的两对机翼,使用往复式化 学肌肉(RCM,Reciprocating Chemical Muscle)驱动。 a) 乔治亚理工大学的Entomopter b) 斯坦福研究中心的 Mentor c) UC Berkeley 研制的 MFI d) Vanderbilt 大学的 CIM 图 1-4 采用特殊驱动方式的扑翼样机 Entomopter 的每一部分设计都具独特性,例如尾部的天线可以增加飞行器的平 衡,腿部可以在地面行走同时兼作燃料箱,还可以增大转动惯量以增加了横滚的 稳定性。研究者还期望它能在未来火星探测中发挥重要作用[24]。b)是在美国 DARPA 的资助下,斯坦福研究中心(SRI)和加拿大多伦多大学共同研制的微型扑翼飞行器 Mentor[25],采用电致伸缩人造肌肉(EPAM)为动力,它是利用 Wei-Fogh 机制飞行的 多扑翼飞行器,可以实现前飞和悬停。c)是美国加州大学伯克利分校研制的微机械 飞虫 MFI[26],采用压电石英驱动扑翼振动,尺寸 10-25mm,重量仅 43mg。只能作 短暂的无控制飞行。d)是 Vanderbilt 大学的 CIM[27],利用压电原理驱动机翼翼展为 15cm,动力系统由锂电池供电。 此外有代表性的是加州理工学院的 Microbat[28],它是一个仿鸟的扑翼飞行器, 形式上已经接近近期的扑翼机,其驱动采用的是机械连杆机构,姿态通过平尾和 垂尾控制。该机在第一次试飞时只飞行了 9 秒,几经改进之后,在 2002 年 8 月成 功飞行 25 分钟,创造了当时扑翼飞行的世界记录

哈尔滨工业大学工程硕士学位论文 随着技术的成熟,扑翼飞行器倾向于稳定和智能化方向发展。伯克利分校的 Biomimetic Millisystems实验室在继MFI项目后,开展新型扑翼机项目Bird-botP] 的研发。该项目的目标是鲁棒智能控制实现室内飞行。该机所搭载的微控制CPU, 包含摄像头、陀螺仪、加速度传感器、通信模块在内,总重只有1.4克。 美国哈佛大学的微机器人实验室(Micro robotics Lab),在DARPA的资助下, 历时7年研制出的电子蝇Micro robotie Fly30-32,如图1-5b),它机身由碳纤维制成, 总重60mg,翼展3cm,扑动频率可达到每秒110次,目前己成功飞行。 a)UC Berkeley最新研发的iBird-bot b)哈佛大学研制的Micro robotic Fly 图1-5美国研制的两种新型微扑翼飞行器 美国扑翼飞行器的最新报道是美国Aero Vironment研发的超微飞行器Nano Air Vehicle):“蜂鸟”Nano Hummingbird3列。该飞行器是由DARPA资助,耗资 400万美元,历时5年时间研制完成。其重量10g,翼展16cm,续航能力10-20分 钟,采用无尾飞行方式,能够实现悬停、翻筋斗等高难度动作。如图1-6所示。其 姿态控制方式与直升机的姿态控制方式有很大相似之处。“蜂鸟”的出现是扑翼史 上的一个里程碑,它代表当前扑翼发展的最高水平。目前“蜂鸟”已可装配军队, 执行小区域以及室内的侦察任务。 图1-6美国航空环境公司的纳米蜂鸟机器人B] -6-
哈尔滨工业大学工程硕士学位论文 -6- 随着技术的成熟,扑翼飞行器倾向于稳定和智能化方向发展。伯克利分校的 Biomimetic Millisystems 实验室在继 MFI 项目后,开展新型扑翼机项目 iBird-bot[29] 的研发。该项目的目标是鲁棒智能控制实现室内飞行。该机所搭载的微控制 CPU, 包含摄像头、陀螺仪、加速度传感器、通信模块在内,总重只有 1.4 克。 美国哈佛大学的微机器人实验室(Micro robotics Lab),在 DARPA 的资助下, 历时 7 年研制出的电子蝇 Micro robotic Fly[30-32],如图 1-5b),它机身由碳纤维制成, 总重 60mg,翼展 3cm,扑动频率可达到每秒 110 次,目前已成功飞行。 a) UC Berkeley 最新研发的 iBird-bot b)哈佛大学研制的 Micro robotic Fly 图 1-5 美国研制的两种新型微扑翼飞行器 美国扑翼飞行器的最新报道是美国 Aero Vironment 研发的超微飞行器(Nano Air Vehicle):“蜂鸟”(Nano Hummingbird[33] )。该飞行器是由 DARPA 资助,耗资 400 万美元,历时 5 年时间研制完成。其重量 10g,翼展 16cm,续航能力 10-20 分 钟,采用无尾飞行方式,能够实现悬停、翻筋斗等高难度动作。如图 1-6 所示。其 姿态控制方式与直升机的姿态控制方式有很大相似之处。“蜂鸟”的出现是扑翼史 上的一个里程碑,它代表当前扑翼发展的最高水平。目前“蜂鸟”已可装配军队, 执行小区域以及室内的侦察任务。 图 1-6 美国航空环境公司的纳米蜂鸟机器人[33]
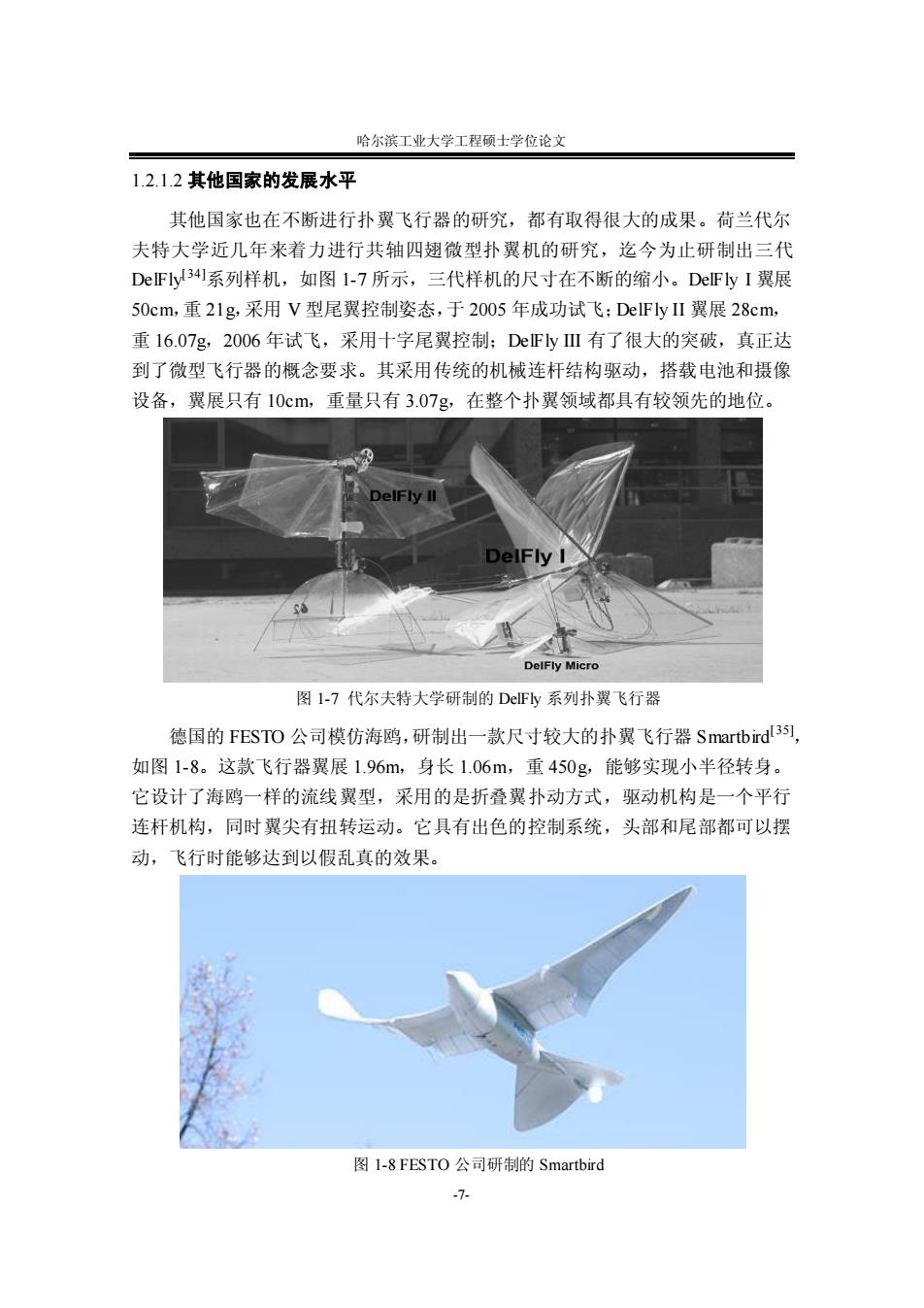
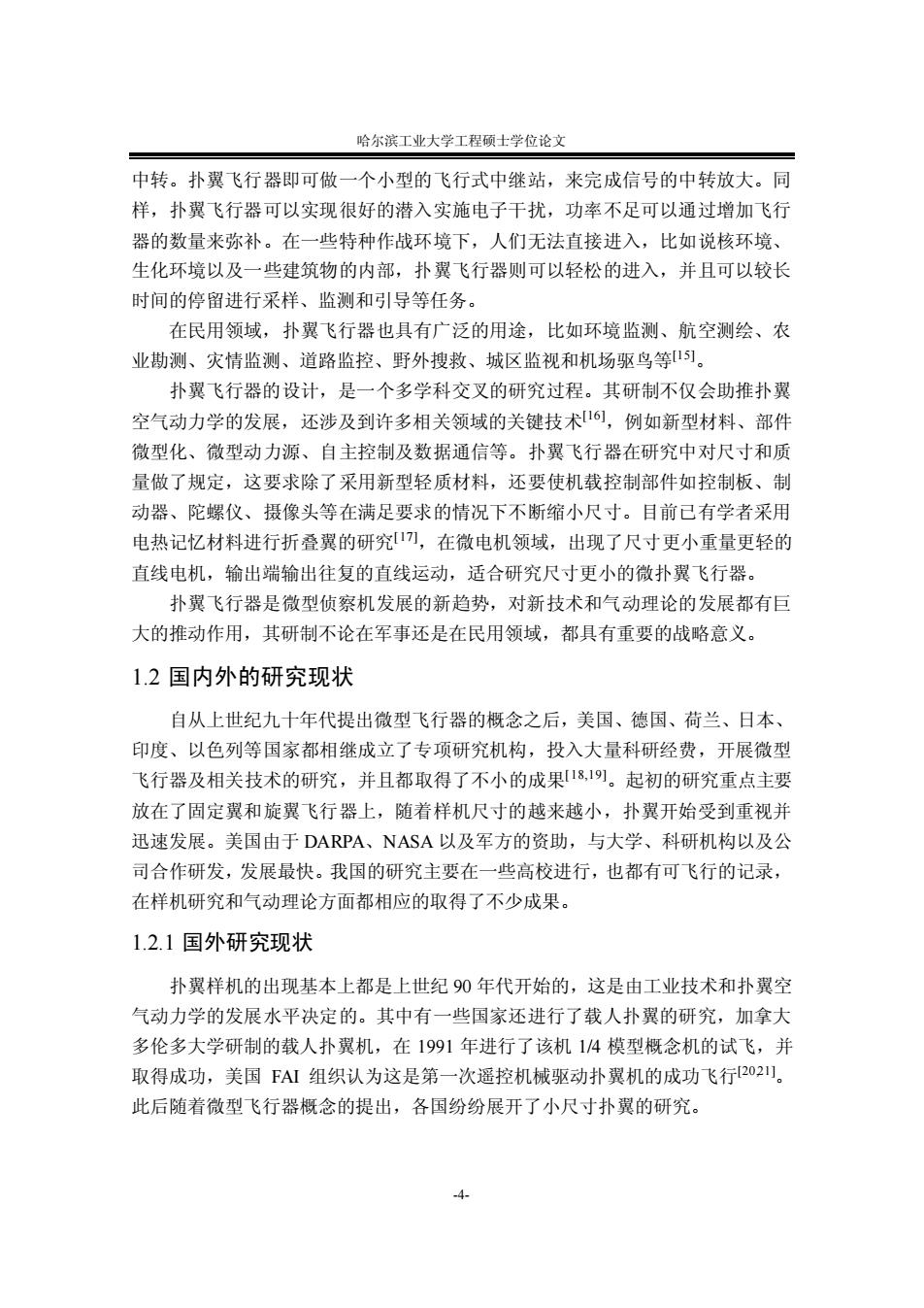
哈尔滨工业大学工程硕士学位论文 1.2.1.2其他国家的发展水平 其他国家也在不断进行扑翼飞行器的研究,都有取得很大的成果。荷兰代尔 夫特大学近几年来着力进行共轴四翅微型扑翼机的研究,迄今为止研制出三代 DeFy34系列样机,如图1-7所示,三代样机的尺寸在不断的缩小。DelFly I翼展 50cm,重21g,采用V型尾翼控制姿态,于2005年成功试飞:DelFly IⅡ翼展28cm, 重16.07g,2006年试飞,采用十字尾翼控制:DelFly III有了很大的突破,真正达 到了微型飞行器的概念要求。其采用传统的机械连杆结构驱动,搭载电池和摄像 设备,翼展只有10cm,重量只有3.07g,在整个扑翼领域都具有较领先的地位。 DelFly Il DelFly I DelFly Micro 图1-7代尔夫特大学研制的DeFy系列扑翼飞行器 德国的FESTO公司模仿海鸥,研制出一款尺寸较大的扑翼飞行器Smartbirdl3), 如图1-8。这款飞行器翼展1.96m,身长1.06m,重450g,能够实现小半径转身。 它设计了海鸥一样的流线翼型,采用的是折叠翼扑动方式,驱动机构是一个平行 连杆机构,同时翼尖有扭转运动。它具有出色的控制系统,头部和尾部都可以摆 动,飞行时能够达到以假乱真的效果。 图l-8 FESTO公司研制的Smartbird -7-
哈尔滨工业大学工程硕士学位论文 -7- 1.2.1.2 其他国家的发展水平 其他国家也在不断进行扑翼飞行器的研究,都有取得很大的成果。荷兰代尔 夫特大学近几年来着力进行共轴四翅微型扑翼机的研究,迄今为止研制出三代 DelFly[34]系列样机,如图 1-7 所示,三代样机的尺寸在不断的缩小。DelFly I 翼展 50cm,重 21g,采用 V 型尾翼控制姿态,于 2005 年成功试飞;DelFly II 翼展 28cm, 重 16.07g,2006 年试飞,采用十字尾翼控制;DelFly III 有了很大的突破,真正达 到了微型飞行器的概念要求。其采用传统的机械连杆结构驱动,搭载电池和摄像 设备,翼展只有 10cm,重量只有 3.07g,在整个扑翼领域都具有较领先的地位。 图 1-7 代尔夫特大学研制的 DelFly 系列扑翼飞行器 德国的 FESTO 公司模仿海鸥,研制出一款尺寸较大的扑翼飞行器 Smartbird[35], 如图 1-8。这款飞行器翼展 1.96m,身长 1.06m,重 450g,能够实现小半径转身。 它设计了海鸥一样的流线翼型,采用的是折叠翼扑动方式,驱动机构是一个平行 连杆机构,同时翼尖有扭转运动。它具有出色的控制系统,头部和尾部都可以摆 动,飞行时能够达到以假乱真的效果。 图 1-8 FESTO 公司研制的 Smartbird
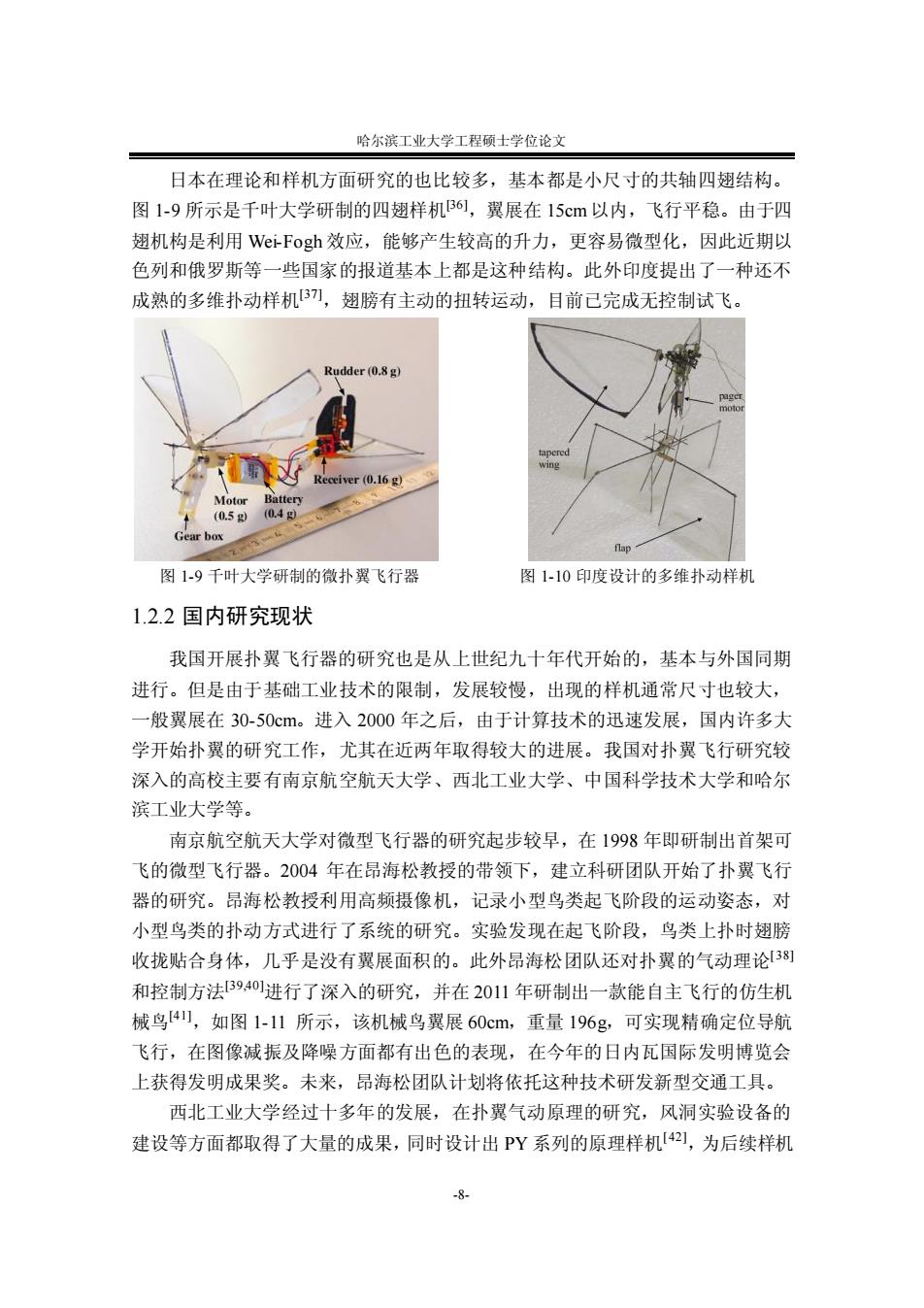
哈尔滨工业大学工程硕士学位论文 日本在理论和样机方面研究的也比较多,基本都是小尺寸的共轴四翅结构。 图1-9所示是千叶大学研制的四翅样机B6,翼展在15cm以内,飞行平稳。由于四 翅机构是利用Wei-Fogh效应,能够产生较高的升力,更容易微型化,因此近期以 色列和俄罗斯等一些国家的报道基本上都是这种结构。此外印度提出了一种还不 成熟的多维扑动样机刀,翅膀有主动的扭转运动,目前己完成无控制试飞。 Rudder(0.8 g) wing Receiver(0.16 g) Motor Battery (0.5g 0.4g Gear box flap 图1-9千叶大学研制的微扑翼飞行器 图1-10印度设计的多维扑动样机 1.2.2国内研究现状 我国开展扑翼飞行器的研究也是从上世纪九十年代开始的,基本与外国同期 进行。但是由于基础工业技术的限制,发展较慢,出现的样机通常尺寸也较大, 一般翼展在30-50cm。进入2000年之后,由于计算技术的迅速发展,国内许多大 学开始扑翼的研究工作,尤其在近两年取得较大的进展。我国对扑翼飞行研究较 深入的高校主要有南京航空航天大学、西北工业大学、中国科学技术大学和哈尔 滨工业大学等。 南京航空航天大学对微型飞行器的研究起步较早,在1998年即研制出首架可 飞的微型飞行器。2004年在昂海松教授的带领下,建立科研团队开始了扑翼飞行 器的研究。昂海松教授利用高频摄像机,记录小型鸟类起飞阶段的运动姿态,对 小型鸟类的扑动方式进行了系统的研究。实验发现在起飞阶段,鸟类上扑时翅膀 收拢贴合身体,几乎是没有翼展面积的。此外昂海松团队还对扑翼的气动理论[38) 和控制方法39,40进行了深入的研究,并在2011年研制出一款能自主飞行的仿生机 械鸟4,如图1-11所示,该机械鸟翼展60cm,重量196g,可实现精确定位导航 飞行,在图像减振及降噪方面都有出色的表现,在今年的日内瓦国际发明博览会 上获得发明成果奖。未来,昂海松团队计划将依托这种技术研发新型交通工具。 西北工业大学经过十多年的发展,在扑翼气动原理的研究,风洞实验设备的 建设等方面都取得了大量的成果,同时设计出PY系列的原理样机42),为后续样机 -8-
哈尔滨工业大学工程硕士学位论文 -8- 日本在理论和样机方面研究的也比较多,基本都是小尺寸的共轴四翅结构。 图 1-9 所示是千叶大学研制的四翅样机[36],翼展在 15cm以内,飞行平稳。由于四 翅机构是利用 Wei-Fogh 效应,能够产生较高的升力,更容易微型化,因此近期以 色列和俄罗斯等一些国家的报道基本上都是这种结构。此外印度提出了一种还不 成熟的多维扑动样机[37],翅膀有主动的扭转运动,目前已完成无控制试飞。 图 1-9 千叶大学研制的微扑翼飞行器 图 1-10 印度设计的多维扑动样机 1.2.2 国内研究现状 我国开展扑翼飞行器的研究也是从上世纪九十年代开始的,基本与外国同期 进行。但是由于基础工业技术的限制,发展较慢,出现的样机通常尺寸也较大, 一般翼展在 30-50cm。进入 2000 年之后,由于计算技术的迅速发展,国内许多大 学开始扑翼的研究工作,尤其在近两年取得较大的进展。我国对扑翼飞行研究较 深入的高校主要有南京航空航天大学、西北工业大学、中国科学技术大学和哈尔 滨工业大学等。 南京航空航天大学对微型飞行器的研究起步较早,在 1998 年即研制出首架可 飞的微型飞行器。2004 年在昂海松教授的带领下,建立科研团队开始了扑翼飞行 器的研究。昂海松教授利用高频摄像机,记录小型鸟类起飞阶段的运动姿态,对 小型鸟类的扑动方式进行了系统的研究。实验发现在起飞阶段,鸟类上扑时翅膀 收拢贴合身体,几乎是没有翼展面积的。此外昂海松团队还对扑翼的气动理论[38] 和控制方法[39,40]进行了深入的研究,并在 2011 年研制出一款能自主飞行的仿生机 械鸟[41],如图 1-11 所示,该机械鸟翼展 60cm,重量 196g,可实现精确定位导航 飞行,在图像减振及降噪方面都有出色的表现,在今年的日内瓦国际发明博览会 上获得发明成果奖。未来,昂海松团队计划将依托这种技术研发新型交通工具。 西北工业大学经过十多年的发展,在扑翼气动原理的研究,风洞实验设备的 建设等方面都取得了大量的成果,同时设计出 PY 系列的原理样机[42],为后续样机