哈尔滨工业大学工学硕士学位论文 图1-7泡沫镍材料水面连续跳跃机器人 区别于水面跳跃机器人,水面滑行机器人比较受到关注,其对支撑力的要求 相较跳跃机器人较低,对滑行机器人的研究了解将有助于分析跳跃机器人静态情 况及蓄力过程。当前国内外研究成果中水面滑行机器人最高速度达到20cm/s[I8-22], 动力源以电机为主,如图1-8为2011年清华大学吴立成教授研制的水面滑行机器 人[20,231。 B 图1-8水黾滑行机器人23) 目前的水面滑行机器人能够较好地实现包括直线行走及转弯动作,但是并未 能实现从运动机理上模仿水黾,推进方式以旋转腿部实现推进。由于机器人未采 用类似水黾腿部摆动的方式,运动效率相对较低,与水黾滑行特点不同,在运动 过程中腿部对水面进行了破坏。 与水面跳跃相接近的另一项运动形式就是水面奔跑,与水面跳跃又有不同的 是,水面奔跑对材料超疏水性的要求较低,以高速运动在水面保持状态,相同点 在于运动过程需要较大的冲量。对水面奔跑机器人的了解将有助于机器人运动轨 迹分析及结构设计。 蛇怪蜥蜴是一种能够在水面快速奔跑的生物,这项技能为其增加了更大的生 存概率。2006年卡耐基梅隆大学的Metin Sittil24-2针对该种生物的运动奔跑过程进 行高速拍摄,通过类似图1-9的方式进行腿部动作分解。根据生物腿部运动轨迹对 机器人腿部采用连杆结构设计,机器人实际水面奔跑速度超过1m/s。为保持机器 人在奔跑过程中的姿态平衡,增加尾部结构用于保持身体平衡,机器人如图1-10 所示。 在水面奔跑机器人的设计过程中,对蜥蜴腿部运动进行了描述并根据设计的 机构进行了相应的参数化改变,通过连杆机构近似地复现了蜥蜴腿部运动情况, -7
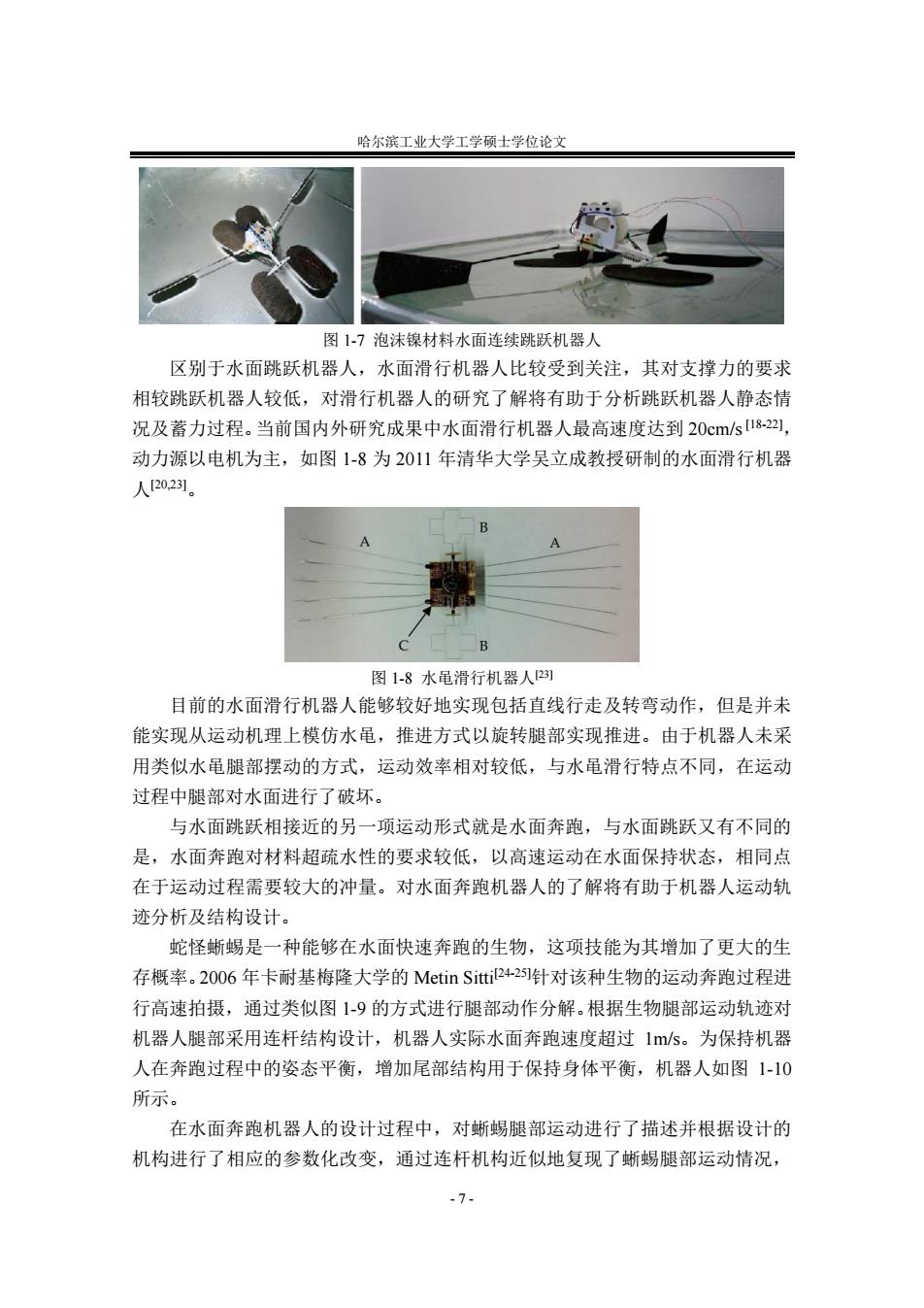
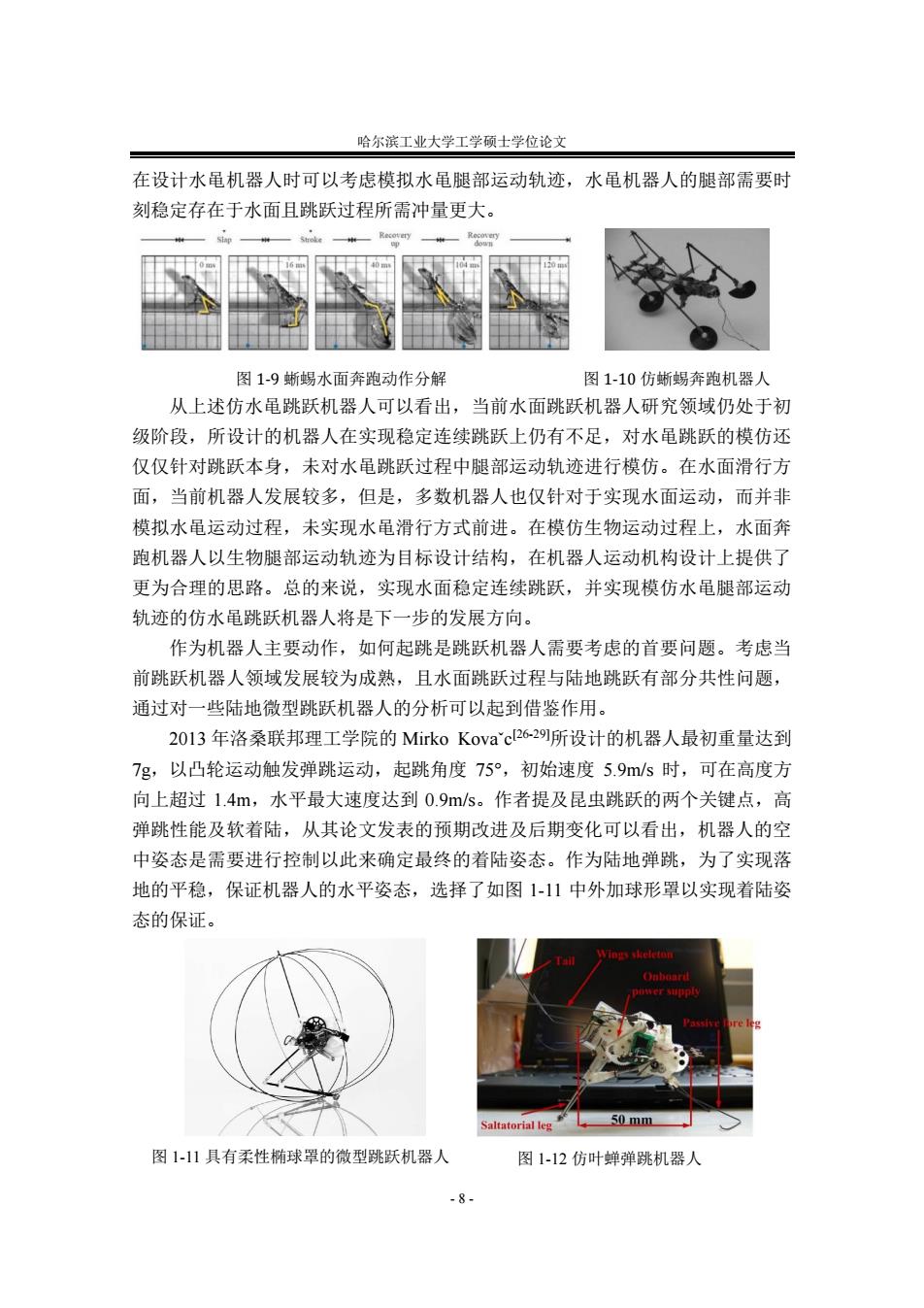
哈尔滨工业大学工学硕士学位论文 - 7 - 图 1-7 泡沫镍材料水面连续跳跃机器人 区别于水面跳跃机器人,水面滑行机器人比较受到关注,其对支撑力的要求 相较跳跃机器人较低,对滑行机器人的研究了解将有助于分析跳跃机器人静态情 况及蓄力过程。当前国内外研究成果中水面滑行机器人最高速度达到 20cm/s[18-22], 动力源以电机为主,如图 1-8 为 2011 年清华大学吴立成教授研制的水面滑行机器 人[20,23]。 图 1-8 水黾滑行机器人[23] 目前的水面滑行机器人能够较好地实现包括直线行走及转弯动作,但是并未 能实现从运动机理上模仿水黾,推进方式以旋转腿部实现推进。由于机器人未采 用类似水黾腿部摆动的方式,运动效率相对较低,与水黾滑行特点不同,在运动 过程中腿部对水面进行了破坏。 与水面跳跃相接近的另一项运动形式就是水面奔跑,与水面跳跃又有不同的 是,水面奔跑对材料超疏水性的要求较低,以高速运动在水面保持状态,相同点 在于运动过程需要较大的冲量。对水面奔跑机器人的了解将有助于机器人运动轨 迹分析及结构设计。 蛇怪蜥蜴是一种能够在水面快速奔跑的生物,这项技能为其增加了更大的生 存概率。2006 年卡耐基梅隆大学的 Metin Sitti[24-25]针对该种生物的运动奔跑过程进 行高速拍摄,通过类似图 1-9 的方式进行腿部动作分解。根据生物腿部运动轨迹对 机器人腿部采用连杆结构设计,机器人实际水面奔跑速度超过 1m/s。为保持机器 人在奔跑过程中的姿态平衡,增加尾部结构用于保持身体平衡,机器人如图 1-10 所示。 在水面奔跑机器人的设计过程中,对蜥蜴腿部运动进行了描述并根据设计的 机构进行了相应的参数化改变,通过连杆机构近似地复现了蜥蜴腿部运动情况
哈尔滨工业大学工学硕士学位论文 在设计水黾机器人时可以考虑模拟水黾腿部运动轨迹,水黾机器人的腿部需要时 刻稳定存在于水面且跳跃过程所需冲量更大。 图1-9蜥蜴水面奔跑动作分解 图1-10仿蜥蜴奔跑机器人 从上述仿水黾跳跃机器人可以看出,当前水面跳跃机器人研究领域仍处于初 级阶段,所设计的机器人在实现稳定连续跳跃上仍有不足,对水黾跳跃的模仿还 仅仅针对跳跃本身,未对水黾跳跃过程中腿部运动轨迹进行模仿。在水面滑行方 面,当前机器人发展较多,但是,多数机器人也仅针对于实现水面运动,而并非 模拟水黾运动过程,未实现水黾滑行方式前进。在模仿生物运动过程上,水面奔 跑机器人以生物腿部运动轨迹为目标设计结构,在机器人运动机构设计上提供了 更为合理的思路。总的来说,实现水面稳定连续跳跃,并实现模仿水黾腿部运动 轨迹的仿水黾跳跃机器人将是下一步的发展方向。 作为机器人主要动作,如何起跳是跳跃机器人需要考虑的首要问题。考虑当 前跳跃机器人领域发展较为成熟,且水面跳跃过程与陆地跳跃有部分共性问题, 通过对一些陆地微型跳跃机器人的分析可以起到借鉴作用。 2013年洛桑联邦理工学院的Mirko Kova'c26-2所设计的机器人最初重量达到 7g,以凸轮运动触发弹跳运动,起跳角度75°,初始速度5.9/s时,可在高度方 向上超过1.4m,水平最大速度达到0.9ms。作者提及昆虫跳跃的两个关键点,高 弹跳性能及软着陆,从其论文发表的预期改进及后期变化可以看出,机器人的空 中姿态是需要进行控制以此来确定最终的着陆姿态。作为陆地弹跳,为了实现落 地的平稳,保证机器人的水平姿态,选择了如图1-11中外加球形罩以实现着陆姿 态的保证。 Wings skeleton Onboard power supply Saltatorial leg 50 mm 图1-11具有柔性椭球罩的微型跳跃机器人 图1-12仿叶蝉弹跳机器人 8
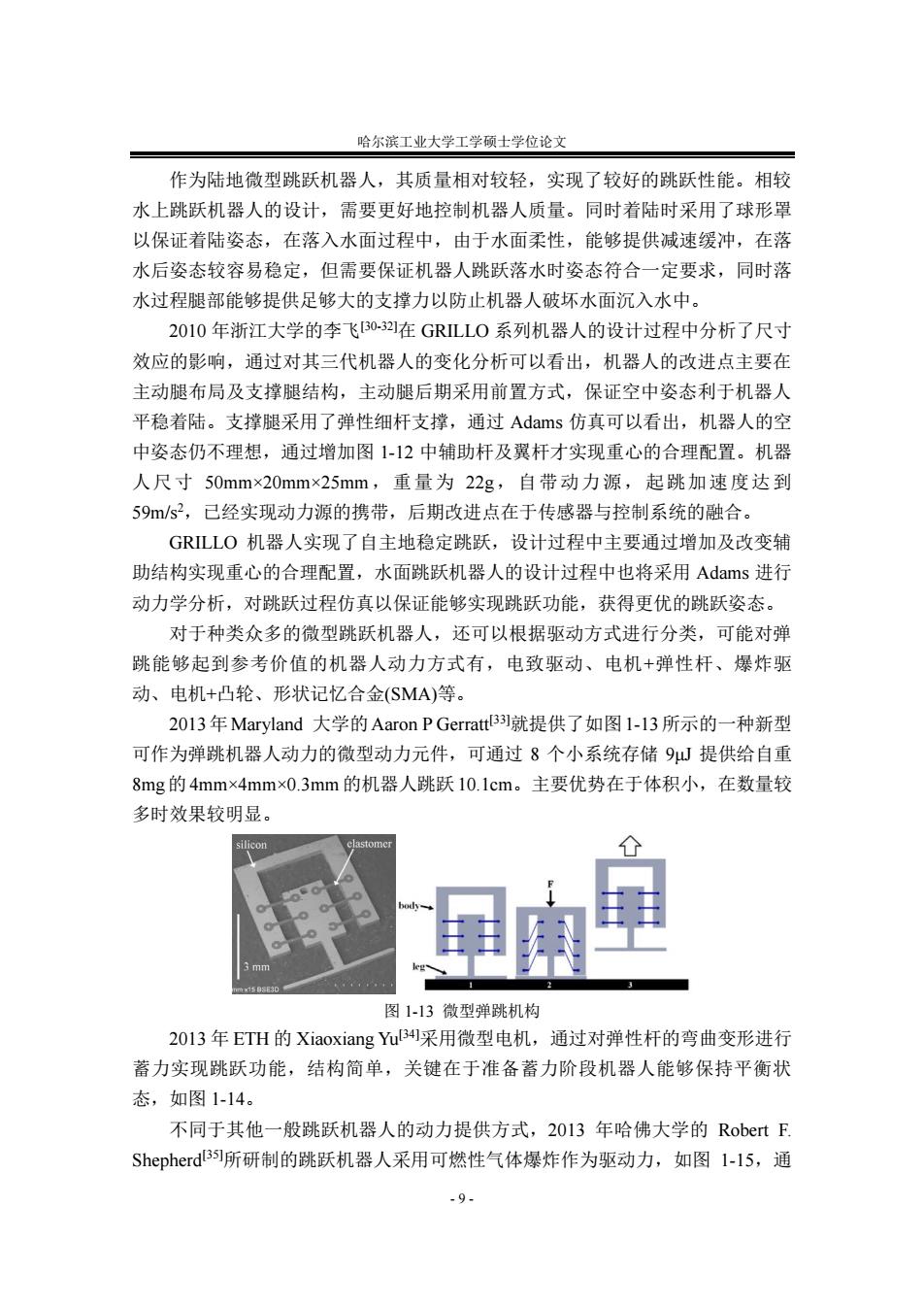
哈尔滨工业大学工学硕士学位论文 - 8 - 在设计水黾机器人时可以考虑模拟水黾腿部运动轨迹,水黾机器人的腿部需要时 刻稳定存在于水面且跳跃过程所需冲量更大。 从上述仿水黾跳跃机器人可以看出,当前水面跳跃机器人研究领域仍处于初 级阶段,所设计的机器人在实现稳定连续跳跃上仍有不足,对水黾跳跃的模仿还 仅仅针对跳跃本身,未对水黾跳跃过程中腿部运动轨迹进行模仿。在水面滑行方 面,当前机器人发展较多,但是,多数机器人也仅针对于实现水面运动,而并非 模拟水黾运动过程,未实现水黾滑行方式前进。在模仿生物运动过程上,水面奔 跑机器人以生物腿部运动轨迹为目标设计结构,在机器人运动机构设计上提供了 更为合理的思路。总的来说,实现水面稳定连续跳跃,并实现模仿水黾腿部运动 轨迹的仿水黾跳跃机器人将是下一步的发展方向。 作为机器人主要动作,如何起跳是跳跃机器人需要考虑的首要问题。考虑当 前跳跃机器人领域发展较为成熟,且水面跳跃过程与陆地跳跃有部分共性问题, 通过对一些陆地微型跳跃机器人的分析可以起到借鉴作用。 2013 年洛桑联邦理工学院的 Mirko Kovaˇc[26-29]所设计的机器人最初重量达到 7g,以凸轮运动触发弹跳运动,起跳角度 75°,初始速度 5.9m/s 时,可在高度方 向上超过 1.4m,水平最大速度达到 0.9m/s。作者提及昆虫跳跃的两个关键点,高 弹跳性能及软着陆,从其论文发表的预期改进及后期变化可以看出,机器人的空 中姿态是需要进行控制以此来确定最终的着陆姿态。作为陆地弹跳,为了实现落 地的平稳,保证机器人的水平姿态,选择了如图 1-11 中外加球形罩以实现着陆姿 态的保证。 图 1-11 具有柔性椭球罩的微型跳跃机器人 图 1-12 仿叶蝉弹跳机器人 图 1-9 蜥蜴水面奔跑动作分解 图 1-10 仿蜥蜴奔跑机器人
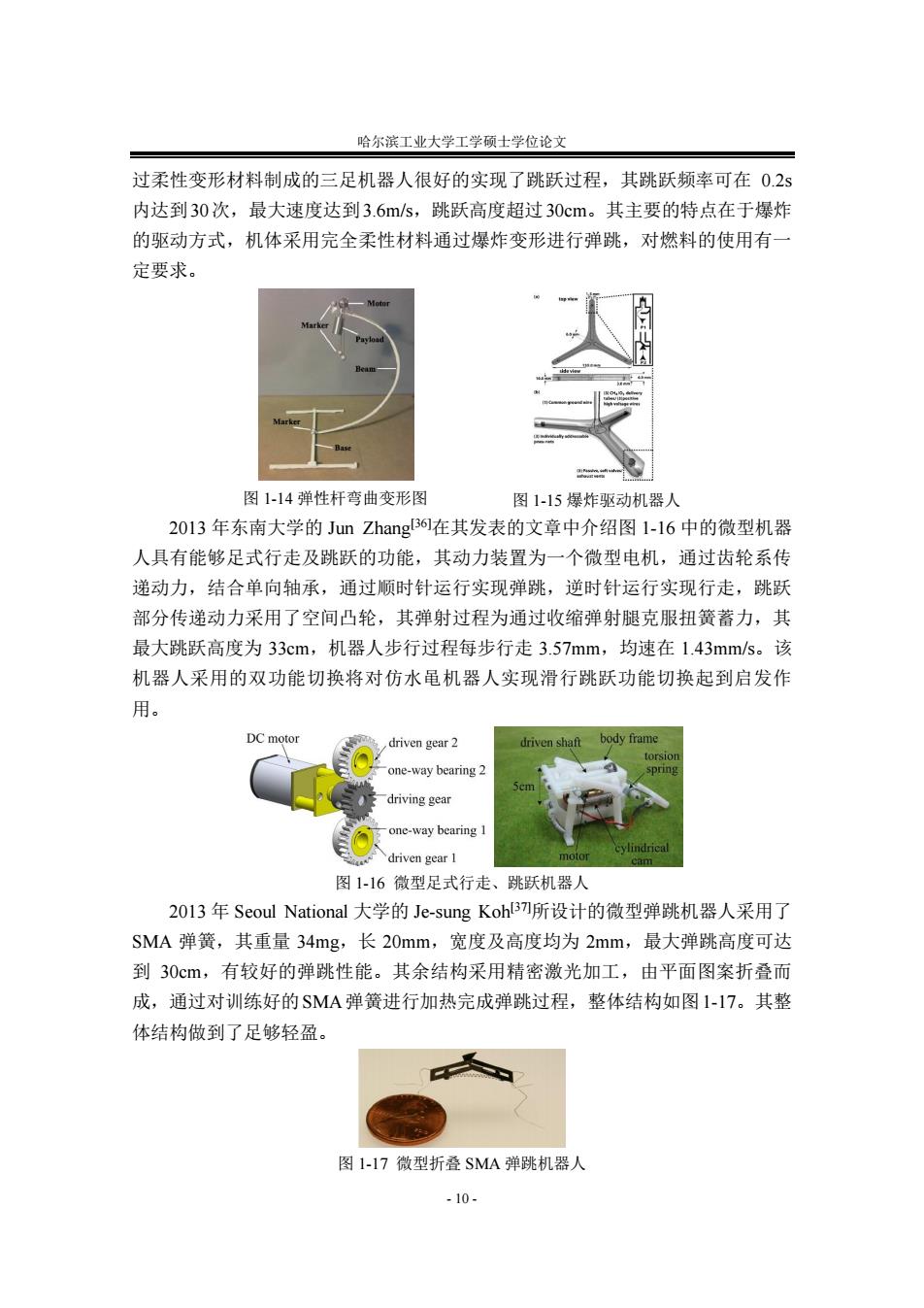
哈尔滨工业大学工学硕士学位论文 作为陆地微型跳跃机器人,其质量相对较轻,实现了较好的跳跃性能。相较 水上跳跃机器人的设计,需要更好地控制机器人质量。同时着陆时采用了球形罩 以保证着陆姿态,在落入水面过程中,由于水面柔性,能够提供减速缓冲,在落 水后姿态较容易稳定,但需要保证机器人跳跃落水时姿态符合一定要求,同时落 水过程腿部能够提供足够大的支撑力以防止机器人破坏水面沉入水中。 2010年浙江大学的李飞[30-32]在GLLO系列机器人的设计过程中分析了尺寸 效应的影响,通过对其三代机器人的变化分析可以看出,机器人的改进点主要在 主动腿布局及支撑腿结构,主动腿后期采用前置方式,保证空中姿态利于机器人 平稳着陆。支撑腿采用了弹性细杆支撑,通过Adams仿真可以看出,机器人的空 中姿态仍不理想,通过增加图1-12中辅助杆及翼杆才实现重心的合理配置。机器 人尺寸50mm×20mm×25mm,重量为22g,自带动力源,起跳加速度达到 59/s2,已经实现动力源的携带,后期改进点在于传感器与控制系统的融合。 GRILLO机器人实现了自主地稳定跳跃,设计过程中主要通过增加及改变辅 助结构实现重心的合理配置,水面跳跃机器人的设计过程中也将采用Adams进行 动力学分析,对跳跃过程仿真以保证能够实现跳跃功能,获得更优的跳跃姿态。 对于种类众多的微型跳跃机器人,还可以根据驱动方式进行分类,可能对弹 跳能够起到参考价值的机器人动力方式有,电致驱动、电机+弹性杆、爆炸驱 动、电机+凸轮、形状记忆合金(SMA)等。 2013年Maryland大学的Aaron P Gerratt!3]就提供了如图1-l3所示的一种新型 可作为弹跳机器人动力的微型动力元件,可通过8个小系统存储9山提供给自重 8mg的4mm×4mm×0.3mm的机器人跳跃10.1cm。主要优势在于体积小,在数量较 多时效果较明显。 图1-13微型弹跳机构 20l3年ETH的Xiaoxiang Yul34采用微型电机,通过对弹性杆的弯曲变形进行 蓄力实现跳跃功能,结构简单,关键在于准备蓄力阶段机器人能够保持平衡状 态,如图1-14。 不同于其他一般跳跃机器人的动力提供方式,2013年哈佛大学的Robert F. Shepherd3可所研制的跳跃机器人采用可燃性气体爆炸作为驱动力,如图1-l5,通 -9-
哈尔滨工业大学工学硕士学位论文 - 9 - 作为陆地微型跳跃机器人,其质量相对较轻,实现了较好的跳跃性能。相较 水上跳跃机器人的设计,需要更好地控制机器人质量。同时着陆时采用了球形罩 以保证着陆姿态,在落入水面过程中,由于水面柔性,能够提供减速缓冲,在落 水后姿态较容易稳定,但需要保证机器人跳跃落水时姿态符合一定要求,同时落 水过程腿部能够提供足够大的支撑力以防止机器人破坏水面沉入水中。 2010 年浙江大学的李飞[30-32]在 GRILLO 系列机器人的设计过程中分析了尺寸 效应的影响,通过对其三代机器人的变化分析可以看出,机器人的改进点主要在 主动腿布局及支撑腿结构,主动腿后期采用前置方式,保证空中姿态利于机器人 平稳着陆。支撑腿采用了弹性细杆支撑,通过 Adams 仿真可以看出,机器人的空 中姿态仍不理想,通过增加图 1-12 中辅助杆及翼杆才实现重心的合理配置。机器 人尺寸 50mm×20mm×25mm,重量为 22g,自带动力源,起跳加速度达到 59m/s2,已经实现动力源的携带,后期改进点在于传感器与控制系统的融合。 GRILLO 机器人实现了自主地稳定跳跃,设计过程中主要通过增加及改变辅 助结构实现重心的合理配置,水面跳跃机器人的设计过程中也将采用 Adams 进行 动力学分析,对跳跃过程仿真以保证能够实现跳跃功能,获得更优的跳跃姿态。 对于种类众多的微型跳跃机器人,还可以根据驱动方式进行分类,可能对弹 跳能够起到参考价值的机器人动力方式有,电致驱动、电机+弹性杆、爆炸驱 动、电机+凸轮、形状记忆合金(SMA)等。 2013年Maryland 大学的Aaron P Gerratt[33]就提供了如图1-13所示的一种新型 可作为弹跳机器人动力的微型动力元件,可通过 8 个小系统存储 9μJ 提供给自重 8mg的4mm×4mm×0.3mm 的机器人跳跃10.1cm。主要优势在于体积小,在数量较 多时效果较明显。 图 1-13 微型弹跳机构 2013 年 ETH 的 Xiaoxiang Yu[34]采用微型电机,通过对弹性杆的弯曲变形进行 蓄力实现跳跃功能,结构简单,关键在于准备蓄力阶段机器人能够保持平衡状 态,如图 1-14。 不同于其他一般跳跃机器人的动力提供方式,2013 年哈佛大学的 Robert F. Shepherd[35]所研制的跳跃机器人采用可燃性气体爆炸作为驱动力,如图 1-15,通
哈尔滨工业大学工学硕士学位论文 过柔性变形材料制成的三足机器人很好的实现了跳跃过程,其跳跃频率可在0.2s 内达到30次,最大速度达到3.6m/s,跳跃高度超过30cm。其主要的特点在于爆炸 的驱动方式,机体采用完全柔性材料通过爆炸变形进行弹跳,对燃料的使用有一 定要求。 图1-14弹性杆弯曲变形图 图1-15爆炸驱动机器人 2013年东南大学的Jun Zhang3在其发表的文章中介绍图1-16中的微型机器 人具有能够足式行走及跳跃的功能,其动力装置为一个微型电机,通过齿轮系传 递动力,结合单向轴承,通过顺时针运行实现弹跳,逆时针运行实现行走,跳跃 部分传递动力采用了空间凸轮,其弹射过程为通过收缩弹射腿克服扭簧蓄力,其 最大跳跃高度为33cm,机器人步行过程每步行走3.57mm,均速在1.43mm/s。该 机器人采用的双功能切换将对仿水黾机器人实现滑行跳跃功能切换起到启发作 用。 DC motor driven gear 2 driven shaft body frame torsion one-way bearing 2 5D1n driving gear one-way bearing 1 driven gear 1 ●n 图1-16微型足式行走、跳跃机器人 2013年Seoul National大学的Je-sung Koh!3刀所设计的微型弹跳机器人采用了 SMA弹簧,其重量34mg,长20mm,宽度及高度均为2mm,最大弹跳高度可达 到30cm,有较好的弹跳性能。其余结构采用精密激光加工,由平面图案折叠而 成,通过对训练好的SMA弹簧进行加热完成弹跳过程,整体结构如图1-17。其整 体结构做到了足够轻盈。 图1-17微型折叠SMA弹跳机器人 -10-
哈尔滨工业大学工学硕士学位论文 - 10 - 过柔性变形材料制成的三足机器人很好的实现了跳跃过程,其跳跃频率可在 0.2s 内达到30次,最大速度达到3.6m/s,跳跃高度超过30cm。其主要的特点在于爆炸 的驱动方式,机体采用完全柔性材料通过爆炸变形进行弹跳,对燃料的使用有一 定要求。 2013 年东南大学的 Jun Zhang[36]在其发表的文章中介绍图 1-16 中的微型机器 人具有能够足式行走及跳跃的功能,其动力装置为一个微型电机,通过齿轮系传 递动力,结合单向轴承,通过顺时针运行实现弹跳,逆时针运行实现行走,跳跃 部分传递动力采用了空间凸轮,其弹射过程为通过收缩弹射腿克服扭簧蓄力,其 最大跳跃高度为 33cm,机器人步行过程每步行走 3.57mm,均速在 1.43mm/s。该 机器人采用的双功能切换将对仿水黾机器人实现滑行跳跃功能切换起到启发作 用。 图 1-16 微型足式行走、跳跃机器人 2013 年 Seoul National 大学的 Je-sung Koh[37]所设计的微型弹跳机器人采用了 SMA 弹簧,其重量 34mg,长 20mm,宽度及高度均为 2mm,最大弹跳高度可达 到 30cm,有较好的弹跳性能。其余结构采用精密激光加工,由平面图案折叠而 成,通过对训练好的SMA弹簧进行加热完成弹跳过程,整体结构如图1-17。其整 体结构做到了足够轻盈。 图 1-17 微型折叠 SMA 弹跳机器人 图 1-14 弹性杆弯曲变形图 图 1-15 爆炸驱动机器人
哈尔滨工业大学工学硕士学位论文 与陆地跳跃不同,为实现跳跃功能,水面上蓄力装置受重量影响较大,且水 面弹跳效率低于陆地跳跃,对蓄力装置要求质量轻且能提供较大冲量。同时,水 面跳跃与地面跳跃同样面临重心配置问题,在陆地上某些机器人采用通过外加球 形罩等方式实现,但考虑水面环境,在水面跳跃中需要通过对重心的合理配置来 保证其落在水面过程中不刺破水面且能够稳定降落。在动力选择上,相较于陆地 机器人众多的动力方式,水面跳跃机器人将采用相对较轻的方案以保证水面运动 稳定性。可以看出水面微型跳跃机器人设计过程中所面临的问题在陆地跳跃机器 人的设计过程中有所体现并且更加苛刻。 1.3主要研究内容 仿生水黾机器人的研究是一项综合仿生学、微机电系统集成、纳米材料以及 表面化学等学科的交叉前沿课题,要实现突破性的成果,需要长期大量的工作。 目前对于仿生水黾跳跃机器人的研究还处于起步阶段,当前所面临的关键问题主 要可以分为两类。 (1)仿生水黾机器人的机理研究 对于仿生机器人的研究,需要针对静态、动态情况进行更深入的分析,需要 分析超疏水性材料在机器人水面滑行、跳跃过程中与水面之间的微观作用机理, 以及机器人处于水-空气界面时静止、运动时受到的各种作用力的影响,进而更好 地实现对仿生水黾机器人的结构设计及运动控制。 (2)仿生水黾跳跃机器人的研制 仿生水黾跳跃机器人重点针对其跳跃过程进行模仿,己经涵盖了仿水黾机器 人的主要难点。复杂的功能需求和尽可能小的自重成为了研制过程的关键问题, 需要涉及机器人微型化,结构设计的优化,驱动控制的节能、轻量化等问题。 针对所面临的关键问题及课题需求,所进行课题的主要研究内容包含以下四 个方面:仿生水黾机器人腿部受力分析,仿生水黾机器人腿部运动受力测试,疏 水性材料水面分离运动微观机理分析,仿生水黾机器人的研制与实验研究。 (1)仿生水黾机器人腿部受力分析。主要内容包含:生物水黾运动过程分 析:对生物水黾受力进行分析:设计仿生水黾机器人腿部形式:对腿部受力建立 受力分析,分别对支撑腿、多腿支撑以及主动腿各类受力情况进行展开,优化机 器人腿部设计。 (2)仿生水黾机器人腿部运动受力测试。主要内容包含:分析腿部运动受力 情况:确定实验平台功能及测试原理:对实验平台进行误差分析:给定实验平台 技术参数并设计制作:对静态情况下材料受力进行测定;对恒定速度变角度情况 -11-
哈尔滨工业大学工学硕士学位论文 - 11 - 与陆地跳跃不同,为实现跳跃功能,水面上蓄力装置受重量影响较大,且水 面弹跳效率低于陆地跳跃,对蓄力装置要求质量轻且能提供较大冲量。同时,水 面跳跃与地面跳跃同样面临重心配置问题,在陆地上某些机器人采用通过外加球 形罩等方式实现,但考虑水面环境,在水面跳跃中需要通过对重心的合理配置来 保证其落在水面过程中不刺破水面且能够稳定降落。在动力选择上,相较于陆地 机器人众多的动力方式,水面跳跃机器人将采用相对较轻的方案以保证水面运动 稳定性。可以看出水面微型跳跃机器人设计过程中所面临的问题在陆地跳跃机器 人的设计过程中有所体现并且更加苛刻。 1.3 主要研究内容 仿生水黾机器人的研究是一项综合仿生学、微机电系统集成、纳米材料以及 表面化学等学科的交叉前沿课题,要实现突破性的成果,需要长期大量的工作。 目前对于仿生水黾跳跃机器人的研究还处于起步阶段,当前所面临的关键问题主 要可以分为两类。 (1)仿生水黾机器人的机理研究 对于仿生机器人的研究,需要针对静态、动态情况进行更深入的分析,需要 分析超疏水性材料在机器人水面滑行、跳跃过程中与水面之间的微观作用机理, 以及机器人处于水-空气界面时静止、运动时受到的各种作用力的影响,进而更好 地实现对仿生水黾机器人的结构设计及运动控制。 (2)仿生水黾跳跃机器人的研制 仿生水黾跳跃机器人重点针对其跳跃过程进行模仿,已经涵盖了仿水黾机器 人的主要难点。复杂的功能需求和尽可能小的自重成为了研制过程的关键问题, 需要涉及机器人微型化,结构设计的优化,驱动控制的节能、轻量化等问题。 针对所面临的关键问题及课题需求,所进行课题的主要研究内容包含以下四 个方面:仿生水黾机器人腿部受力分析,仿生水黾机器人腿部运动受力测试,疏 水性材料水面分离运动微观机理分析,仿生水黾机器人的研制与实验研究。 (1)仿生水黾机器人腿部受力分析。主要内容包含:生物水黾运动过程分 析;对生物水黾受力进行分析;设计仿生水黾机器人腿部形式;对腿部受力建立 受力分析,分别对支撑腿、多腿支撑以及主动腿各类受力情况进行展开,优化机 器人腿部设计。 (2)仿生水黾机器人腿部运动受力测试。主要内容包含:分析腿部运动受力 情况;确定实验平台功能及测试原理;对实验平台进行误差分析;给定实验平台 技术参数并设计制作;对静态情况下材料受力进行测定;对恒定速度变角度情况