哈尔滨工业大学工学硕士学位论文 有较多的成果,不过当前滑行方面相关的流体理论还未完善,在跳跃领域的研究 也相对较少,多侧重于观察性质,还未扩展至完备的理论层面。 各类水面生物的流体相关参数对比见表1-1。表中部分参数含义如下。R表 征水黾水面运动过程阻力,水黾运动阻力在各昆虫中最小:W表征运动冲量与表 面张力之比,水黾运动过程中能够有效借助表面张力作用:Ba表征重力与表面张 力之比,水黾在水面能够稳定站立。故此,我们可以看出水黾在水面的运动优 势,其运动阻力更小,表面张力作用明显,运动速度较快。 表1-1各类水上生物运动参数对比四 Leg aspect Reynolds Weber Baudoin ratio=d Re=Vd We=pV'd Ba=Mg Strider 0.01 16 6×10-2 0.03 Springtail 0.2 50 0.4 1.2×102 Beetle larva 0.5 300 0.4 0.3 Fishing spider 0.2 100-1000 1-10 0.12 注:d表示腿部宽度,L表示腿部长度,V表示运动速度,4是运动粘度, p为水密度,g为重力加速度,y为表面张力系数,M为生物重量,P为腿部与 水面三相线周长。 2010年,MT的Hū关于水上行走生物流体动力学的文章中对各类水上生物 进行了相关的运动分析,图1-1中可以看到水黾的起跳过程,提供跳跃力的腿己 经按压入水较大深度。此时由于水黾腿部超疏水性刚毛结构表面及蜡质表面的原 因并未破坏水面,表面张力为水黾提供了较大的反作用力,起跳峰值速度可以达 到1.5m/s,跳跃高度可以达到18cm。 b 图1-1水黾跳跃过程 2000年,Vassar College的Robert B.Suterl2针对水蜘蛛在水面的跳跃进行了分 析。针对不同重量的水蜘蛛进行跳跃实验,发现重量更小的水蜘蛛有更加灵活的 运动特性,其跳跃过程中通过表面刚毛及形状变化得到的腿部面积横向扩展将有 利于其跳跃过程中获得更大的跳跃力。在图1-2的水蜘蛛的跳跃过程中可以明显 看出其腿部的入水深度很深,最大深度可达3.8mm,同样没有出现水面被刺破的 -2
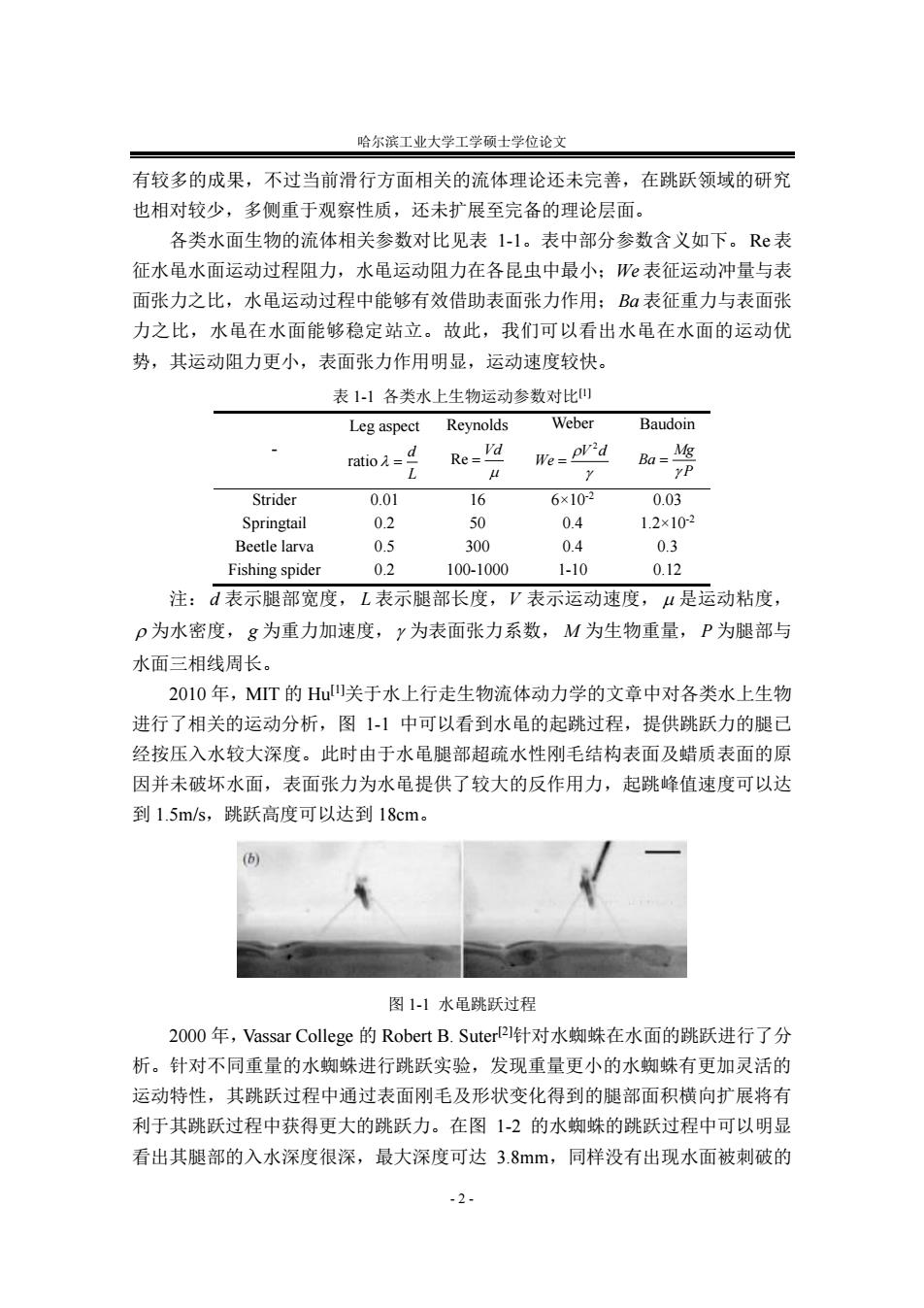
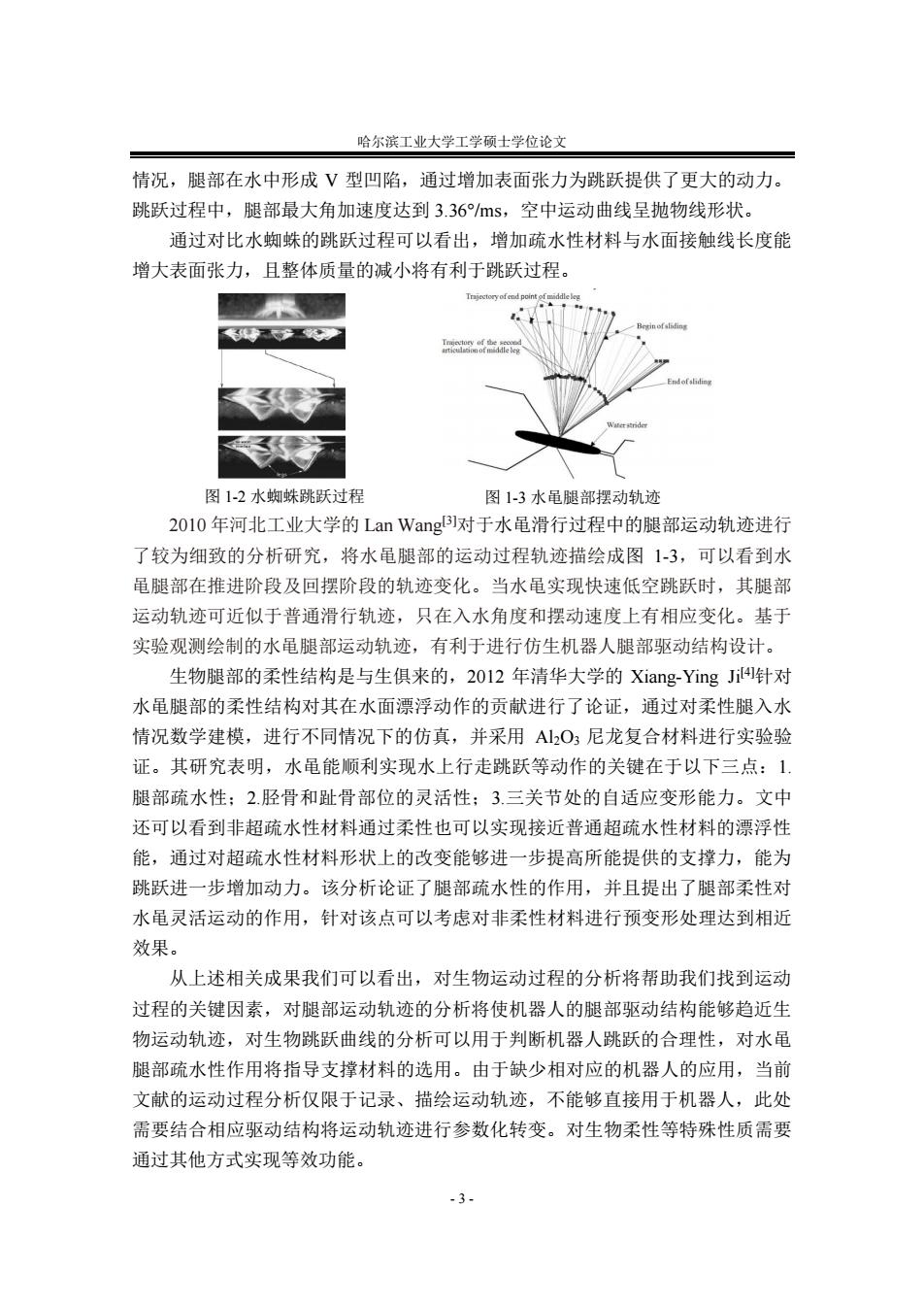
哈尔滨工业大学工学硕士学位论文 - 2 - 有较多的成果,不过当前滑行方面相关的流体理论还未完善,在跳跃领域的研究 也相对较少,多侧重于观察性质,还未扩展至完备的理论层面。 各类水面生物的流体相关参数对比见表 1-1。表中部分参数含义如下。 Re 表 征水黾水面运动过程阻力,水黾运动阻力在各昆虫中最小; We 表征运动冲量与表 面张力之比,水黾运动过程中能够有效借助表面张力作用; Ba 表征重力与表面张 力之比,水黾在水面能够稳定站立。故此,我们可以看出水黾在水面的运动优 势,其运动阻力更小,表面张力作用明显,运动速度较快。 表 1-1 各类水上生物运动参数对比[1] - Leg aspect ratio d L Reynolds Re Vd Weber 2 V d We Baudoin Mg Ba P Strider 0.01 16 6×10-2 0.03 Springtail 0.2 50 0.4 1.2×10-2 Beetle larva 0.5 300 0.4 0.3 Fishing spider 0.2 100-1000 1-10 0.12 注: d 表示腿部宽度, L 表示腿部长度, V 表示运动速度, 是运动粘度, 为水密度, g 为重力加速度, 为表面张力系数, M 为生物重量, P 为腿部与 水面三相线周长。 2010 年,MIT 的 Hu[1]关于水上行走生物流体动力学的文章中对各类水上生物 进行了相关的运动分析,图 1-1 中可以看到水黾的起跳过程,提供跳跃力的腿已 经按压入水较大深度。此时由于水黾腿部超疏水性刚毛结构表面及蜡质表面的原 因并未破坏水面,表面张力为水黾提供了较大的反作用力,起跳峰值速度可以达 到 1.5m/s,跳跃高度可以达到 18cm。 图 1-1 水黾跳跃过程 2000 年,Vassar College 的 Robert B. Suter[2]针对水蜘蛛在水面的跳跃进行了分 析。针对不同重量的水蜘蛛进行跳跃实验,发现重量更小的水蜘蛛有更加灵活的 运动特性,其跳跃过程中通过表面刚毛及形状变化得到的腿部面积横向扩展将有 利于其跳跃过程中获得更大的跳跃力。在图 1-2 的水蜘蛛的跳跃过程中可以明显 看出其腿部的入水深度很深,最大深度可达 3.8mm,同样没有出现水面被刺破的
哈尔滨工业大学工学硕士学位论文 情况,腿部在水中形成V型凹陷,通过增加表面张力为跳跃提供了更大的动力。 跳跃过程中,腿部最大角加速度达到3.36°ms,空中运动曲线呈抛物线形状。 通过对比水蜘蛛的跳跃过程可以看出,增加疏水性材料与水面接触线长度能 增大表面张力,且整体质量的减小将有利于跳跃过程。 Trajectory ofend point of 【diee 图1-2水蜘蛛跳跃过程 图1-3水黾腿部摆动轨迹 2010年河北工业大学的Lan Wang!]对于水黾滑行过程中的腿部运动轨迹进行 了较为细致的分析研究,将水黾腿部的运动过程轨迹描绘成图1-3,可以看到水 黾腿部在推进阶段及回摆阶段的轨迹变化。当水黾实现快速低空跳跃时,其腿部 运动轨迹可近似于普通滑行轨迹,只在入水角度和摆动速度上有相应变化。基于 实验观测绘制的水黾腿部运动轨迹,有利于进行仿生机器人腿部驱动结构设计。 生物腿部的柔性结构是与生俱来的,2012年清华大学的Xiang-Ying Jil4针对 水黾腿部的柔性结构对其在水面漂浮动作的贡献进行了论证,通过对柔性腿入水 情况数学建模,进行不同情况下的仿真,并采用A12O,尼龙复合材料进行实验验 证。其研究表明,水黾能顺利实现水上行走跳跃等动作的关键在于以下三点:1 腿部疏水性:2.胫骨和趾骨部位的灵活性:3.三关节处的自适应变形能力。文中 还可以看到非超疏水性材料通过柔性也可以实现接近普通超疏水性材料的漂浮性 能,通过对超疏水性材料形状上的改变能够进一步提高所能提供的支撑力,能为 跳跃进一步增加动力。该分析论证了腿部疏水性的作用,并且提出了腿部柔性对 水黾灵活运动的作用,针对该点可以考虑对非柔性材料进行预变形处理达到相近 效果。 从上述相关成果我们可以看出,对生物运动过程的分析将帮助我们找到运动 过程的关键因素,对腿部运动轨迹的分析将使机器人的腿部驱动结构能够趋近生 物运动轨迹,对生物跳跃曲线的分析可以用于判断机器人跳跃的合理性,对水黾 腿部疏水性作用将指导支撑材料的选用。由于缺少相对应的机器人的应用,当前 文献的运动过程分析仅限于记录、描绘运动轨迹,不能够直接用于机器人,此处 需要结合相应驱动结构将运动轨迹进行参数化转变。对生物柔性等特殊性质需要 通过其他方式实现等效功能。 -3
哈尔滨工业大学工学硕士学位论文 - 3 - 情况,腿部在水中形成 V 型凹陷,通过增加表面张力为跳跃提供了更大的动力。 跳跃过程中,腿部最大角加速度达到 3.36°/ms,空中运动曲线呈抛物线形状。 通过对比水蜘蛛的跳跃过程可以看出,增加疏水性材料与水面接触线长度能 增大表面张力,且整体质量的减小将有利于跳跃过程。 2010 年河北工业大学的 Lan Wang[3]对于水黾滑行过程中的腿部运动轨迹进行 了较为细致的分析研究,将水黾腿部的运动过程轨迹描绘成图 1-3,可以看到水 黾腿部在推进阶段及回摆阶段的轨迹变化。当水黾实现快速低空跳跃时,其腿部 运动轨迹可近似于普通滑行轨迹,只在入水角度和摆动速度上有相应变化。基于 实验观测绘制的水黾腿部运动轨迹,有利于进行仿生机器人腿部驱动结构设计。 生物腿部的柔性结构是与生俱来的,2012 年清华大学的 Xiang-Ying Ji[4]针对 水黾腿部的柔性结构对其在水面漂浮动作的贡献进行了论证,通过对柔性腿入水 情况数学建模,进行不同情况下的仿真,并采用 Al2O3 尼龙复合材料进行实验验 证。其研究表明,水黾能顺利实现水上行走跳跃等动作的关键在于以下三点:1. 腿部疏水性;2.胫骨和趾骨部位的灵活性;3.三关节处的自适应变形能力。文中 还可以看到非超疏水性材料通过柔性也可以实现接近普通超疏水性材料的漂浮性 能,通过对超疏水性材料形状上的改变能够进一步提高所能提供的支撑力,能为 跳跃进一步增加动力。该分析论证了腿部疏水性的作用,并且提出了腿部柔性对 水黾灵活运动的作用,针对该点可以考虑对非柔性材料进行预变形处理达到相近 效果。 从上述相关成果我们可以看出,对生物运动过程的分析将帮助我们找到运动 过程的关键因素,对腿部运动轨迹的分析将使机器人的腿部驱动结构能够趋近生 物运动轨迹,对生物跳跃曲线的分析可以用于判断机器人跳跃的合理性,对水黾 腿部疏水性作用将指导支撑材料的选用。由于缺少相对应的机器人的应用,当前 文献的运动过程分析仅限于记录、描绘运动轨迹,不能够直接用于机器人,此处 需要结合相应驱动结构将运动轨迹进行参数化转变。对生物柔性等特殊性质需要 通过其他方式实现等效功能。 图 1-2 水蜘蛛跳跃过程 图 1-3 水黾腿部摆动轨迹
哈尔滨工业大学工学硕士学位论文 1.2.2超疏水性材料机理及研究现状 2004年,中科院江雷指出水黾腿部的超疏水性是由于腿部密布的刚毛上的 微螺旋结构与蜡质共同形成,完善了之前关于腿部超疏水是由于腿部表面蜡质[ 的说法。针对超疏水性,2007年清华大学的Feng Shil☑解释了超疏水性对于水黾 的必要性,主要在于:1形成空气薄膜,以提供更大浮力及稳定性,保证受外力 干扰仍能处于水面:2.减少运动的阻力。跳跃机器人为实现跳跃功能则更需要超 疏水性材料的性能更加优异。这些发现揭示了超疏水性的基本原理及优越特性, 对仿生机器人腿部材料的选取提供了判断依据。 在材料的仿生领域,超疏水性材料的制备发展迅速。2007年Joensuu大学的 Esa Puukilainen8通过微纳加工方式获得了接触角达到165°的超疏水性材料,2012 年哈工大Qinmin Pan!例采用化学方式制备的泡沫镍材料接触角达到161°,2005年 吉林大学Lin Fengtio-l以多孔氧化铝为模板,所获得的聚苯乙烯的纳米阵列膜最 高接触角可以达到162士1.7°。相比之下,生物水黾腿部接触角为165°,人工的材 料制备在静态接触角上已经接近生物水黾自身特性。 尽管材料表面微纳结构导致超疏水性能的原理不断地被应用到超疏水性材料 的制备当中,但是对于超疏水性材料的制备过程的理论分析仍不完善。借用分子 动力学模拟的方法,能够对疏水性材料表面的微纳结构进行分析,并针对宏观上 难以实现的测试进行模拟。 (a) c d (n) 雪且量 图1-4分子动力学模拟对比组图4 当前利用分子动力学进行材料疏水性的模拟不断涌现[2-131,2013年Pusan National大学的Matthew Stanley Ambrosiall4在他的论文中进行了静态情况下,水 滴在具有纳米结构的固体表面由Wenzel状态到Cassie状态变化的一系列模拟。通 过改变固体表面立柱的覆盖率及高度分析了表面状态润湿变化的影响,如图1-4 -4-
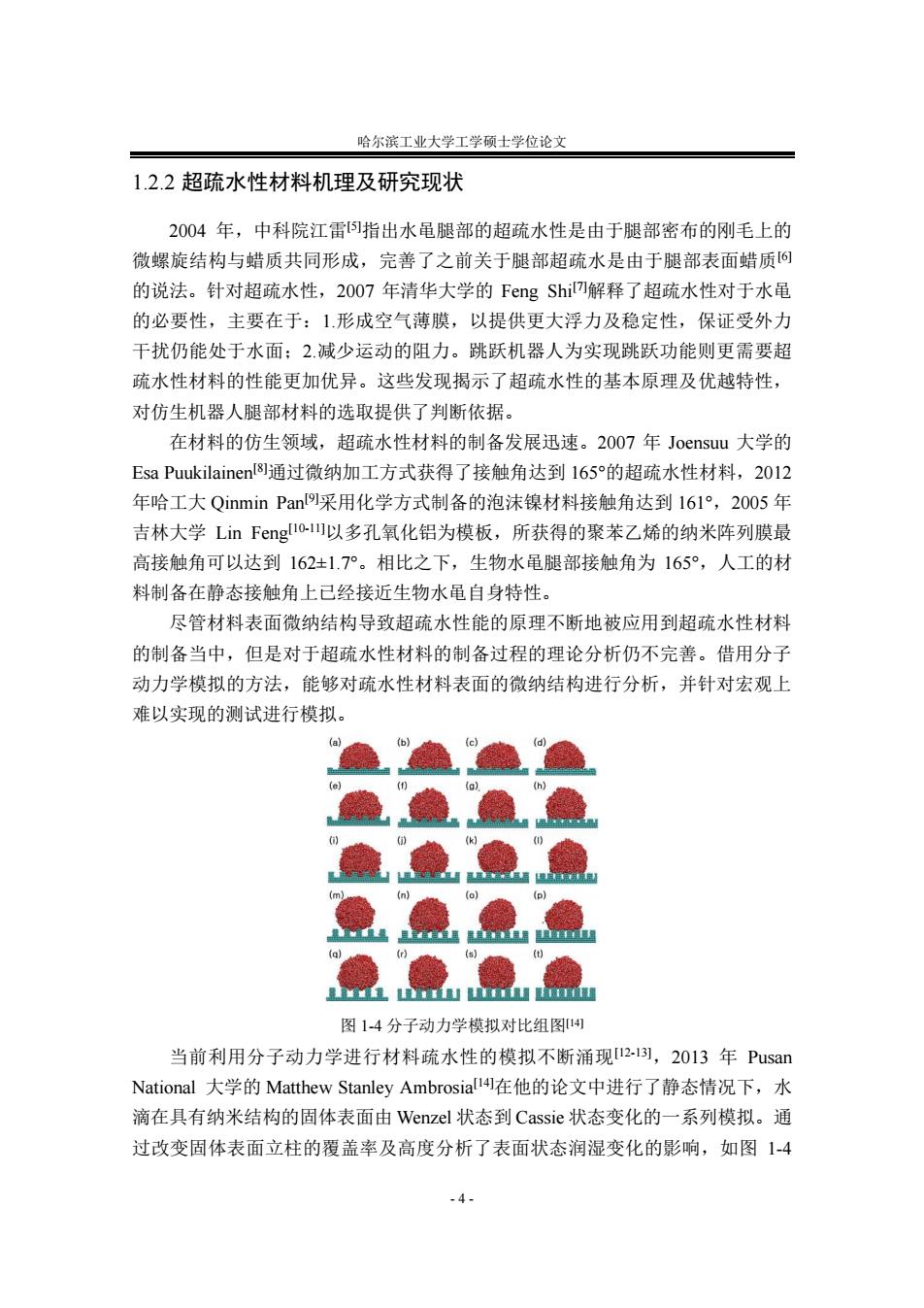
哈尔滨工业大学工学硕士学位论文 - 4 - 1.2.2 超疏水性材料机理及研究现状 2004 年,中科院江雷[5]指出水黾腿部的超疏水性是由于腿部密布的刚毛上的 微螺旋结构与蜡质共同形成,完善了之前关于腿部超疏水是由于腿部表面蜡质[6] 的说法。针对超疏水性,2007 年清华大学的 Feng Shi[7]解释了超疏水性对于水黾 的必要性,主要在于:1.形成空气薄膜,以提供更大浮力及稳定性,保证受外力 干扰仍能处于水面;2.减少运动的阻力。跳跃机器人为实现跳跃功能则更需要超 疏水性材料的性能更加优异。这些发现揭示了超疏水性的基本原理及优越特性, 对仿生机器人腿部材料的选取提供了判断依据。 在材料的仿生领域,超疏水性材料的制备发展迅速。2007 年 Joensuu 大学的 Esa Puukilainen[8]通过微纳加工方式获得了接触角达到 165°的超疏水性材料,2012 年哈工大 Qinmin Pan[9]采用化学方式制备的泡沫镍材料接触角达到 161°,2005 年 吉林大学 Lin Feng[10-11]以多孔氧化铝为模板,所获得的聚苯乙烯的纳米阵列膜最 高接触角可以达到 162±1.7°。相比之下,生物水黾腿部接触角为 165°,人工的材 料制备在静态接触角上已经接近生物水黾自身特性。 尽管材料表面微纳结构导致超疏水性能的原理不断地被应用到超疏水性材料 的制备当中,但是对于超疏水性材料的制备过程的理论分析仍不完善。借用分子 动力学模拟的方法,能够对疏水性材料表面的微纳结构进行分析,并针对宏观上 难以实现的测试进行模拟。 图 1-4 分子动力学模拟对比组图[14] 当前利用分子动力学进行材料疏水性的模拟不断涌现[12-13],2013 年 Pusan National 大学的 Matthew Stanley Ambrosia[14]在他的论文中进行了静态情况下,水 滴在具有纳米结构的固体表面由 Wenzel 状态到 Cassie 状态变化的一系列模拟。通 过改变固体表面立柱的覆盖率及高度分析了表面状态润湿变化的影响,如图 1-4
哈尔滨工业大学工学硕士学位论文 所示。相类似的,当前超疏水性材料的分子动力学模拟主要针对材料静态微观特 性进行分析。而此处关注仿生水黾运动过程中疏水性材料与水界面之间相互作用, 相对应的动态微观作用需要进一步探索。 哈工大对相应领域的动态情况进行了分子动力学模拟。丁月胜针对仿水黾 机器人水面跳跃和滑行过程进行分析,机器人腿部与水面存在竖直方向和水平方 向上的相对运动,并分别设计相应的动态微观机理分析的方法,在竖直方向上建 立水滴冲击单板模型,在水平方向上建立双板挤压反向运动模型。针对水滴与材 料的相对速度和材料微观组成产生的影响进行分析,并且对动态模拟过程中材料 浸润状态,液滴与材料微观作用力,水滴质心位置,液滴接触角滞后等方面进行 了微观分析。王亚男模拟研究水滴以不同速度冲击超疏水材料表面,统计分析 了超疏水材料表面浸润状态、浸润状态的改变、接触角、水滴重心以及水滴与超 疏水材料表面与水之间相互作用力的变化,进而获得驱动腿入水动作临界速度微 观变化规律,实现任意冲击速度下超疏水材料的浸润状态的判断。这些模拟对水 黾运动过程中材料与水面相互作用进行了分析,有助于水黾机器人选用材料及配 置参数。 在超疏水性材料的制备方面,目前的超疏水性材料部分性能已经接近或者超 越了水黾腿部,但是其材料的稳定性及材料制造过程中的理论依据仍需要进一步 的完善。材料的发展将极大地促进仿生水面机器人的研究进程。对于当前超疏水 性材料微观作用机理的分析,已广泛采用分子动力学模拟作为工具,并在各类微 纳结构上有了诸多的成果,但是目前仍较多地局限于静态情况下的模拟或者以静 态指标对模拟结果进行评判,而针对动态情形进行的仿真却寥寥可数。因此目前 还未能够形成完善的体系及评价标准,但可以在动态模拟及模拟的动态指标选取 上进行发展。 1.2.3仿生水面及微型跳跃机器人研究现状 在当前材料及动力配置下,水面跳跃机器人很少且均处于起步阶段仍有较大 改进空间。但是,在相关的水面滑行与奔跑机器人方面当前已有一些发展较为全 面的参考。 2008年,Seoul National大学的Bongsu Shin1展示了以SMA弹簧为动力的单 次跳跃机构,如图1-5所示,机构从外形上较为接近生物水黾,腿部材料为经过 超疏水性涂覆处理的不锈钢丝,接触角为150°。文中通过改变腿部结构实现机器 人跳跃角度及高度的变化,当竖直方向分力较大时出现刺破水面情况,其跳跃最 大高度为26mm,文中定义水面跳跃及陆地跳跃高度比值作为水面跳跃效率参数 -5-
哈尔滨工业大学工学硕士学位论文 - 5 - 所示。相类似的,当前超疏水性材料的分子动力学模拟主要针对材料静态微观特 性进行分析。而此处关注仿生水黾运动过程中疏水性材料与水界面之间相互作用, 相对应的动态微观作用需要进一步探索。 哈工大对相应领域的动态情况进行了分子动力学模拟。丁月胜[15]针对仿水黾 机器人水面跳跃和滑行过程进行分析,机器人腿部与水面存在竖直方向和水平方 向上的相对运动,并分别设计相应的动态微观机理分析的方法,在竖直方向上建 立水滴冲击单板模型,在水平方向上建立双板挤压反向运动模型。针对水滴与材 料的相对速度和材料微观组成产生的影响进行分析,并且对动态模拟过程中材料 浸润状态,液滴与材料微观作用力,水滴质心位置,液滴接触角滞后等方面进行 了微观分析。王亚男[16]模拟研究水滴以不同速度冲击超疏水材料表面,统计分析 了超疏水材料表面浸润状态、浸润状态的改变、接触角、水滴重心以及水滴与超 疏水材料表面与水之间相互作用力的变化,进而获得驱动腿入水动作临界速度微 观变化规律,实现任意冲击速度下超疏水材料的浸润状态的判断。这些模拟对水 黾运动过程中材料与水面相互作用进行了分析,有助于水黾机器人选用材料及配 置参数。 在超疏水性材料的制备方面,目前的超疏水性材料部分性能已经接近或者超 越了水黾腿部,但是其材料的稳定性及材料制造过程中的理论依据仍需要进一步 的完善。材料的发展将极大地促进仿生水面机器人的研究进程。对于当前超疏水 性材料微观作用机理的分析,已广泛采用分子动力学模拟作为工具,并在各类微 纳结构上有了诸多的成果,但是目前仍较多地局限于静态情况下的模拟或者以静 态指标对模拟结果进行评判,而针对动态情形进行的仿真却寥寥可数。因此目前 还未能够形成完善的体系及评价标准,但可以在动态模拟及模拟的动态指标选取 上进行发展。 1.2.3 仿生水面及微型跳跃机器人研究现状 在当前材料及动力配置下,水面跳跃机器人很少且均处于起步阶段仍有较大 改进空间。但是,在相关的水面滑行与奔跑机器人方面当前已有一些发展较为全 面的参考。 2008 年,Seoul National 大学的 Bongsu Shin[17]展示了以 SMA 弹簧为动力的单 次跳跃机构,如图 1-5 所示,机构从外形上较为接近生物水黾,腿部材料为经过 超疏水性涂覆处理的不锈钢丝,接触角为 150°。文中通过改变腿部结构实现机器 人跳跃角度及高度的变化,当竖直方向分力较大时出现刺破水面情况,其跳跃最 大高度为 26mm,文中定义水面跳跃及陆地跳跃高度比值作为水面跳跃效率参数
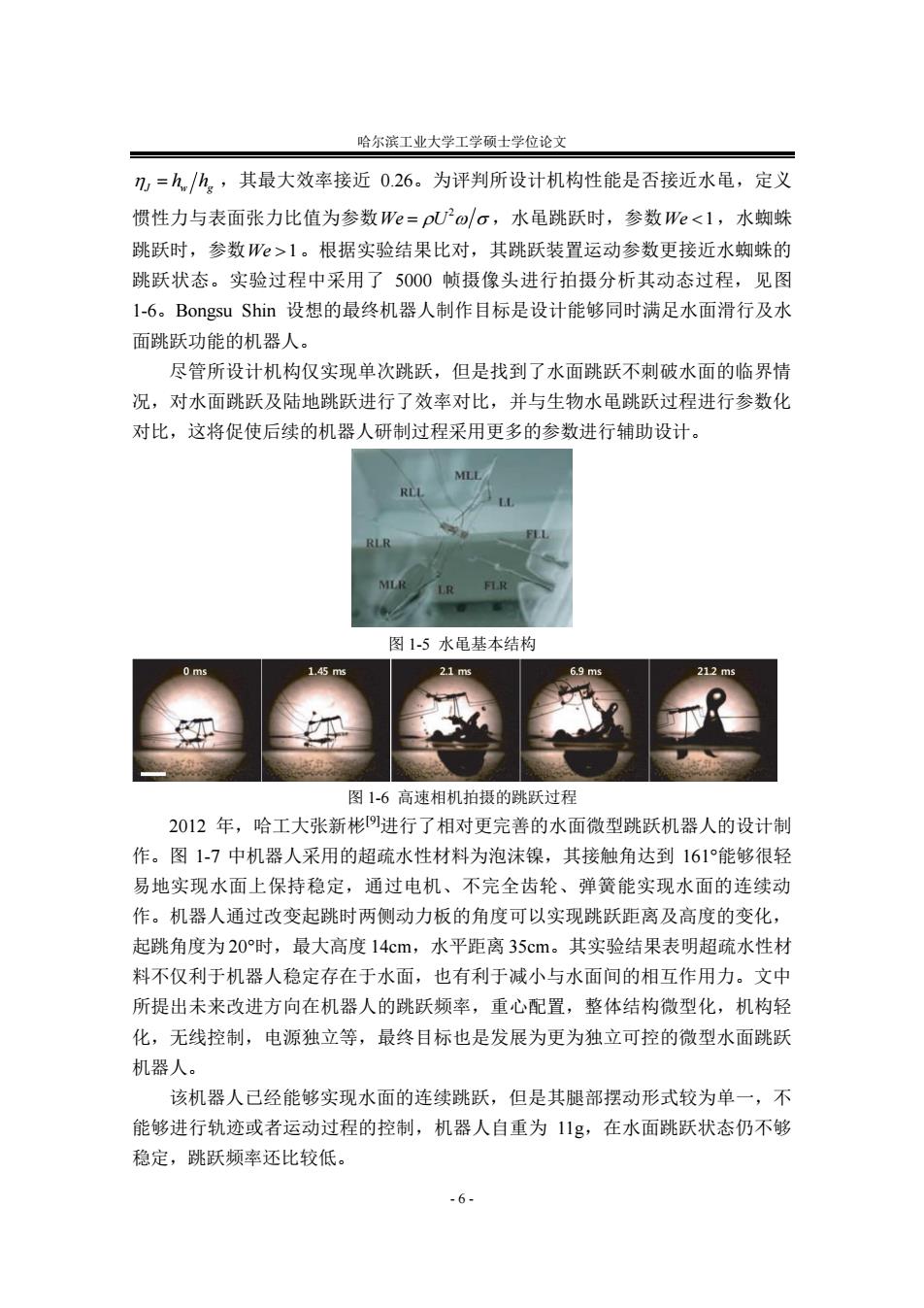
哈尔滨工业大学工学硕士学位论文 =h/h,其最大效率接近0.26。为评判所设计机构性能是否接近水黾,定义 惯性力与表面张力比值为参数We=pUo/o,水黾跳跃时,参数We<1,水蜘蛛 跳跃时,参数W>1。根据实验结果比对,其跳跃装置运动参数更接近水蜘蛛的 跳跃状态。实验过程中采用了5000帧摄像头进行拍摄分析其动态过程,见图 1-6。Bongsu Shin设想的最终机器人制作目标是设计能够同时满足水面滑行及水 面跳跃功能的机器人。 尽管所设计机构仅实现单次跳跃,但是找到了水面跳跃不刺破水面的临界情 况,对水面跳跃及陆地跳跃进行了效率对比,并与生物水黾跳跃过程进行参数化 对比,这将促使后续的机器人研制过程采用更多的参数进行辅助设计。 MLL RLL RLR MLR 月R 图1-5水黾基本结构 0 ms L45 ms 21s 69 ms 212ms 图1-6高速相机拍摄的跳跃过程 2012年,哈工大张新彬9进行了相对更完善的水面微型跳跃机器人的设计制 作。图1-7中机器人采用的超疏水性材料为泡沫镍,其接触角达到161°能够很轻 易地实现水面上保持稳定,通过电机、不完全齿轮、弹簧能实现水面的连续动 作。机器人通过改变起跳时两侧动力板的角度可以实现跳跃距离及高度的变化, 起跳角度为20时,最大高度14cm,水平距离35cm。其实验结果表明超疏水性材 料不仅利于机器人稳定存在于水面,也有利于减小与水面间的相互作用力。文中 所提出未来改进方向在机器人的跳跃频率,重心配置,整体结构微型化,机构轻 化,无线控制,电源独立等,最终目标也是发展为更为独立可控的微型水面跳跃 机器人。 该机器人已经能够实现水面的连续跳跃,但是其腿部摆动形式较为单一,不 能够进行轨迹或者运动过程的控制,机器人自重为11g,在水面跳跃状态仍不够 稳定,跳跃频率还比较低。 -6-
哈尔滨工业大学工学硕士学位论文 - 6 - J w g h h ,其最大效率接近 0.26。为评判所设计机构性能是否接近水黾,定义 惯性力与表面张力比值为参数 2 We U ,水黾跳跃时,参数 We 1 ,水蜘蛛 跳跃时,参数 We 1 。根据实验结果比对,其跳跃装置运动参数更接近水蜘蛛的 跳跃状态。实验过程中采用了 5000 帧摄像头进行拍摄分析其动态过程,见图 1-6。Bongsu Shin 设想的最终机器人制作目标是设计能够同时满足水面滑行及水 面跳跃功能的机器人。 尽管所设计机构仅实现单次跳跃,但是找到了水面跳跃不刺破水面的临界情 况,对水面跳跃及陆地跳跃进行了效率对比,并与生物水黾跳跃过程进行参数化 对比,这将促使后续的机器人研制过程采用更多的参数进行辅助设计。 图 1-5 水黾基本结构 图 1-6 高速相机拍摄的跳跃过程 2012 年,哈工大张新彬[9]进行了相对更完善的水面微型跳跃机器人的设计制 作。图 1-7 中机器人采用的超疏水性材料为泡沫镍,其接触角达到 161°能够很轻 易地实现水面上保持稳定,通过电机、不完全齿轮、弹簧能实现水面的连续动 作。机器人通过改变起跳时两侧动力板的角度可以实现跳跃距离及高度的变化, 起跳角度为 20°时,最大高度 14cm,水平距离 35cm。其实验结果表明超疏水性材 料不仅利于机器人稳定存在于水面,也有利于减小与水面间的相互作用力。文中 所提出未来改进方向在机器人的跳跃频率,重心配置,整体结构微型化,机构轻 化,无线控制,电源独立等,最终目标也是发展为更为独立可控的微型水面跳跃 机器人。 该机器人已经能够实现水面的连续跳跃,但是其腿部摆动形式较为单一,不 能够进行轨迹或者运动过程的控制,机器人自重为 11g,在水面跳跃状态仍不够 稳定,跳跃频率还比较低