哈尔滨工业大学工学硕士学位论文 控制(VSC)等多种控制方法对气动人工肌肉系统进行控制,通过对这几种控 制方法进行比较,得出了一个简单的评价,指出Backstepping控制方法效果较 差,而自适应Backstepping与VSC控制方法能够获得满意的控制效果,但常规 VSC控制量存在烈抖动现象,不适合实际应用。另外,Salford大学的Caldwell 和Gustavo也在这方面做了大量研究,他们设计了一种带前馈参量的离散PID 控制器来控制一组对抗性气动人工肌肉驱动关节,通过大量的实验来调整控制 器从而获得合适的闭环频宽。但是由于管道长度、温度变化等外在因素以及气 动人工肌肉本身特性的原因使得控制效果对前馈参量的变化非常敏感。为了克 服系统参数变化的影响,在后续的研究中他们采用了非线性极点配置自适应控 制方法,在每次采样中断时,利用参数估计算法并根据采样数据进行控制器的 参数计算,以达到消除参数变化对系统性能影响的目的,其控制精度可以达到 士I°。Cai和Yamaura使用滑模控制理论设计了鲁棒控制器。Hesselroth等采 用神经网络对气动肌肉进行控制,通过训练之后,可达到较好的跟踪性能。 K.Osuka通过将气动人工肌肉线性化,采用H_理论设计了气动肌肉的控制器。 宗光华教授在我国最早开始对气动人工肌肉的控制理论进行研究,采用变 结构控制理论实现了机械手指夹持力控制。田社平采用极点配置自适应预测控 制的方法对气动人工肌肉进行快速、高精度的位置控制,其后他也尝试了其他 控制方法,如气动人工肌肉神经网络非线性控制方法等。 1.4主要研究内容 课题前期对仿青蛙跳跃机器人的研究已经有了阶段性的成果。第一代的仿 青蛙跳跃机器人利用弹簧五杆机构作为弹跳部件,其跳跃能力有限。后期研究 中利用气动人工肌肉作为驱动器驱动机器人实现跳跃,其跳跃高度可达到 60cm,跳跃能力有了明显的提高,因此后续课题依然利用人工肌肉作为驱动器。 前一阶段设计的机器人跳跃腿如图1-18所示。 上代样机的研制说明了利用气动人工肌肉作为跳跃腿驱动器是可行的,但 是没有对气动人工肌肉进行具体的研究,也没有对其进行精确的控制,此外, 跳跃腿在设计上存在一些不足之处: (1)踝关节采用双关节机构来增大关节的运动范围和输出转矩,但是在实 验中发现此处的双关节设计不但没有起到预想的效果,反而加重了其它肌肉的 负担。 (2)跳跃腿没有设计角度传感器和力传感器的安装位置,导致机器人无法 实现位置和力闭环控制,也不能实时采集关节运动数据。 (3)人工肌肉轴端连接件重量大,位置固定不可靠。 8-
哈尔滨工业大学工学硕士学位论文 - 8 - 控制(VSC)等多种控制方法对气动人工肌肉系统进行控制,通过对这几种控 制方法进行比较,得出了一个简单的评价,指出 Backstepping 控制方法效果较 差,而自适应 Backstepping 与 VSC 控制方法能够获得满意的控制效果,但常规 VSC 控制量存在剧烈抖动现象,不适合实际应用。另外,Salford 大学的 Caldwell 和 Gustavo 也在这方面做了大量研究,他们设计了一种带前馈参量的离散 PID 控制器来控制一组对抗性气动人工肌肉驱动关节,通过大量的实验来调整控制 器从而获得合适的闭环频宽。但是由于管道长度、温度变化等外在因素以及气 动人工肌肉本身特性的原因使得控制效果对前馈参量的变化非常敏感。为了克 服系统参数变化的影响,在后续的研究中他们采用了非线性极点配置自适应控 制方法,在每次采样中断时,利用参数估计算法并根据采样数据进行控制器的 参数计算,以达到消除参数变化对系统性能影响的目的,其控制精度可以达到 ±1°。Cai 和 Yamaura 使用滑模控制理论设计了鲁棒控制器。Hesselroth 等采 用神经网络对气动肌肉进行控制,通过训练之后,可达到较好的跟踪性能。 K.Osuka 通过将气动人工肌肉线性化,采用 H∞理论设计了气动肌肉的控制器。 宗光华教授在我国最早开始对气动人工肌肉的控制理论进行研究,采用变 结构控制理论实现了机械手指夹持力控制。田社平采用极点配置自适应预测控 制的方法对气动人工肌肉进行快速、高精度的位置控制,其后他也尝试了其他 控制方法,如气动人工肌肉神经网络非线性控制方法等。 1.4 主要研究内容 课题前期对仿青蛙跳跃机器人的研究已经有了阶段性的成果。第一代的仿 青蛙跳跃机器人利用弹簧五杆机构作为弹跳部件,其跳跃能力有限。后期研究 中利用气动人工肌肉作为驱动器驱动机器人实现跳跃,其跳跃高度可达到 60cm,跳跃能力有了明显的提高,因此后续课题依然利用人工肌肉作为驱动器。 前一阶段设计的机器人跳跃腿如图 1-18 所示。 上代样机的研制说明了利用气动人工肌肉作为跳跃腿驱动器是可行的,但 是没有对气动人工肌肉进行具体的研究,也没有对其进行精确的控制,此外, 跳跃腿在设计上存在一些不足之处: (1) 踝关节采用双关节机构来增大关节的运动范围和输出转矩,但是在实 验中发现此处的双关节设计不但没有起到预想的效果,反而加重了其它肌肉的 负担。 (2) 跳跃腿没有设计角度传感器和力传感器的安装位置,导致机器人无法 实现位置和力闭环控制,也不能实时采集关节运动数据。 (3) 人工肌肉轴端连接件重量大,位置固定不可靠
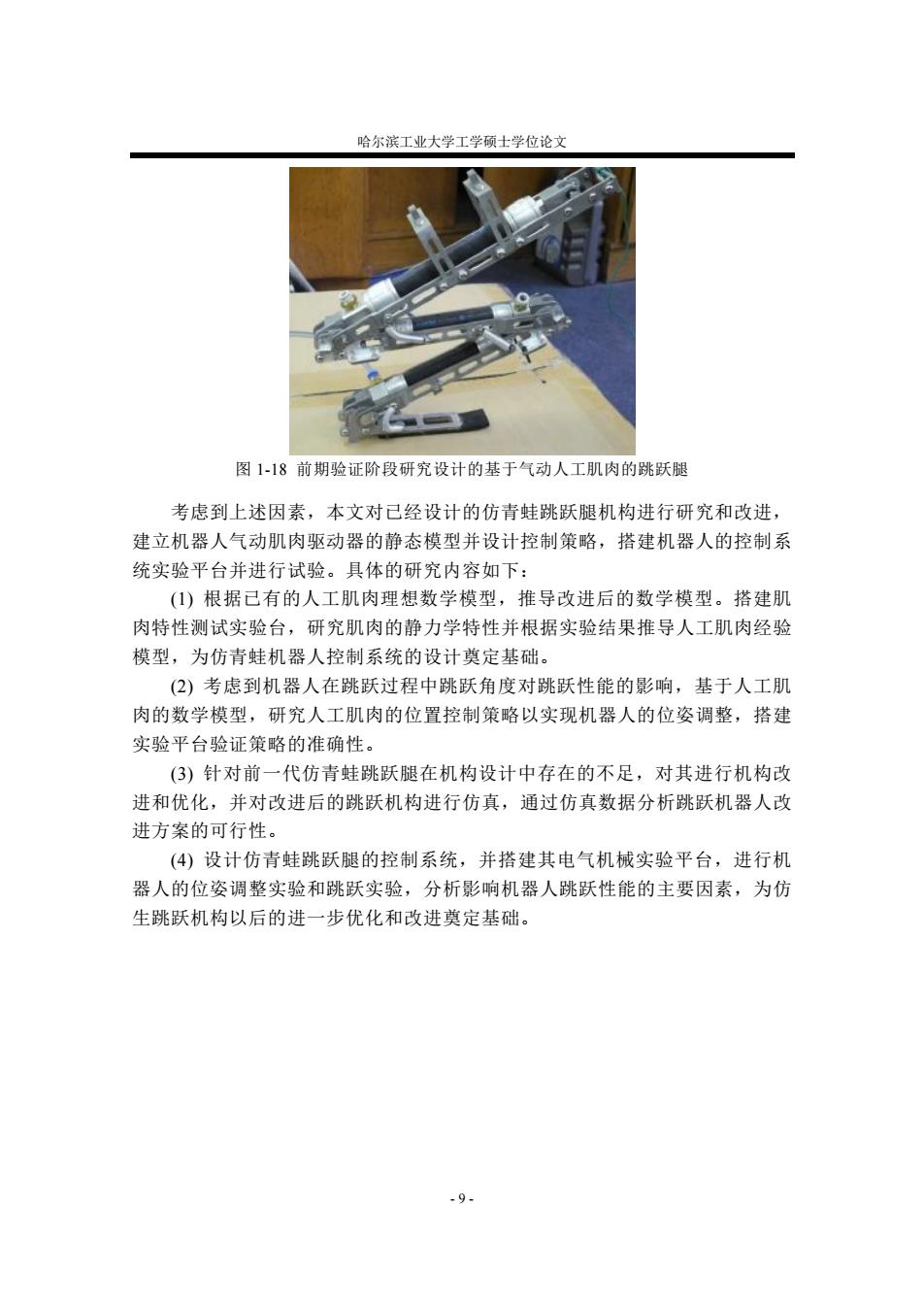
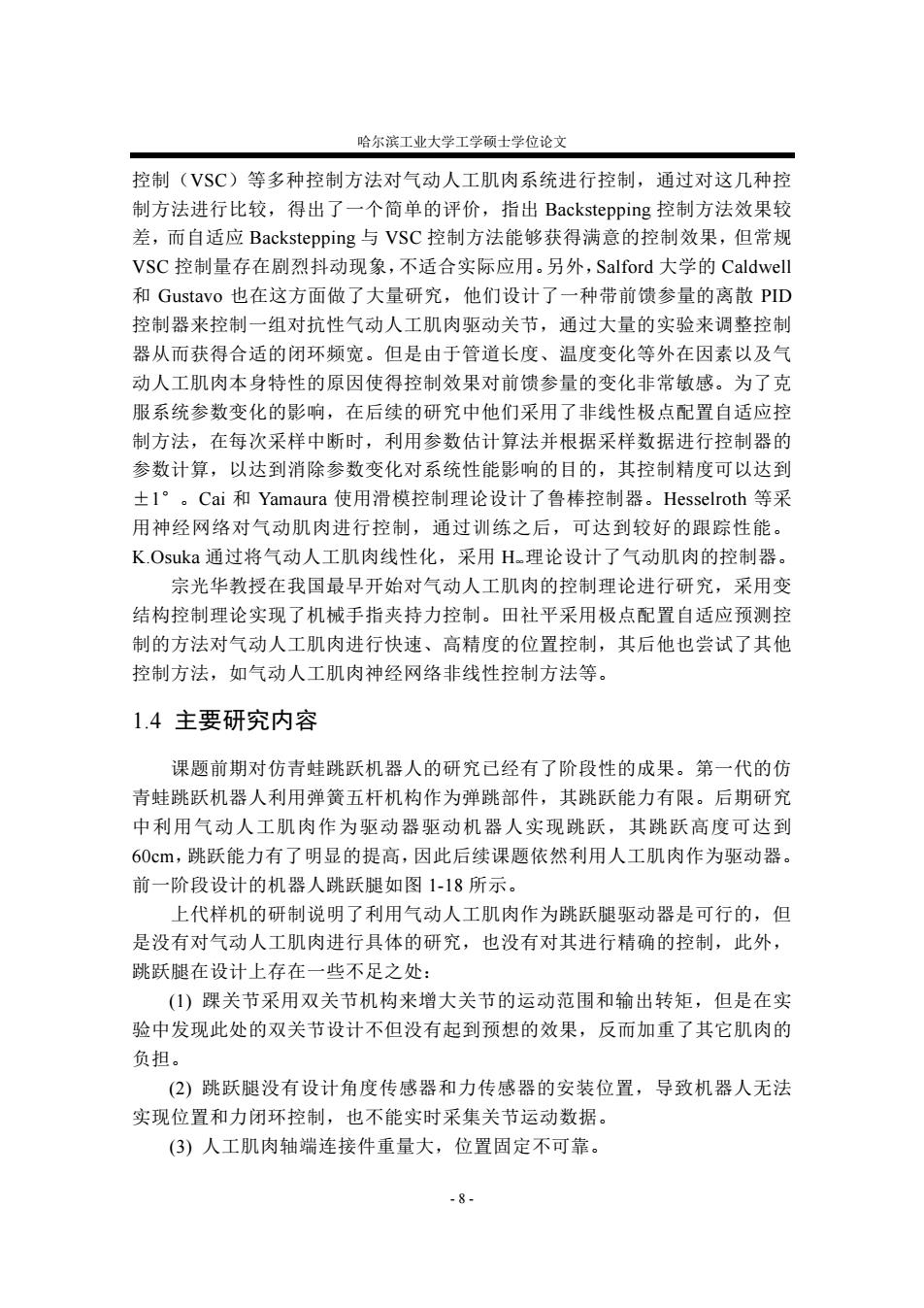
哈尔滨工业大学工学硕士学位论文 图1-18前期验证阶段研究设计的基于气动人工肌肉的跳跃腿 考虑到上述因素,本文对己经设计的仿青蛙跳跃腿机构进行研究和改进, 建立机器人气动肌肉驱动器的静态模型并设计控制策略,搭建机器人的控制系 统实验平台并进行试验。具体的研究内容如下: (1)根据已有的人工肌肉理想数学模型,推导改进后的数学模型。搭建肌 肉特性测试实验台,研究肌肉的静力学特性并根据实验结果推导人工肌肉经验 模型,为仿青蛙机器人控制系统的设计奠定基础。 (2)考虑到机器人在跳跃过程中跳跃角度对跳跃性能的影响,基于人工肌 肉的数学模型,研究人工肌肉的位置控制策略以实现机器人的位姿调整,搭建 实验平台验证策略的准确性。 (3)针对前一代仿青蛙跳跃腿在机构设计中存在的不足,对其进行机构改 进和优化,并对改进后的跳跃机构进行仿真,通过仿真数据分析跳跃机器人改 进方案的可行性。 (4)设计仿青蛙跳跃腿的控制系统,并搭建其电气机械实验平台,进行机 器人的位姿调整实验和跳跃实验,分析影响机器人跳跃性能的主要因素,为仿 生跳跃机构以后的进一步优化和改进奠定基础。 -9
哈尔滨工业大学工学硕士学位论文 - 9 - 图 1-18 前期验证阶段研究设计的基于气动人工肌肉的跳跃腿 考虑到上述因素,本文对已经设计的仿青蛙跳跃腿机构进行研究和改进, 建立机器人气动肌肉驱动器的静态模型并设计控制策略,搭建机器人的控制系 统实验平台并进行试验。具体的研究内容如下: (1) 根据已有的人工肌肉理想数学模型,推导改进后的数学模型。搭建肌 肉特性测试实验台,研究肌肉的静力学特性并根据实验结果推导人工肌肉经验 模型,为仿青蛙机器人控制系统的设计奠定基础。 (2) 考虑到机器人在跳跃过程中跳跃角度对跳跃性能的影响,基于人工肌 肉的数学模型,研究人工肌肉的位置控制策略以实现机器人的位姿调整,搭建 实验平台验证策略的准确性。 (3) 针对前一代仿青蛙跳跃腿在机构设计中存在的不足,对其进行机构改 进和优化,并对改进后的跳跃机构进行仿真,通过仿真数据分析跳跃机器人改 进方案的可行性。 (4) 设计仿青蛙跳跃腿的控制系统,并搭建其电气机械实验平台,进行机 器人的位姿调整实验和跳跃实验,分析影响机器人跳跃性能的主要因素,为仿 生跳跃机构以后的进一步优化和改进奠定基础
哈尔滨工业大学工学硕士学位论文 第2章气动人工肌肉的静态模型建立 2.1引言 气动人工肌肉(PAM)的迟滞现象和输出力对充入压力和收缩长度的非线性 使得其控制器的设计比较困难。为了便于肌肉控制器的设计,必须得出拉力与 压力和长度的准确关系式,即气动人工肌肉的数学模型。但是,影响肌肉特性 的因素很多,如橡胶管的弹性,编织网的摩擦等等,因此要得到准确的数学模 型是非常困难的。现今被广泛认可的气动肌肉数学模型是Chou-Hannaford和 Tondu-Lopez的理想数学模型,但其与实际有较大的出入。本章在考虑影响肌 肉特性的各种因素基础上,对理想模型加以改进建立了较完整的气动肌肉理论 数学模型。此外,提出一种基于实验的建立PAM经验模型的方法,并利用此 方法建立了肌肉的经验模型,设计验证实验确定此种模型的准确性和简便性。 2.2气动人工肌肉的理论数学模型建立 2.2.1气动肌肉理想模型建立 所有的气动肌肉理论模型都是以Cou的模型为基础的。因此,在本章的 开始先简单的推导出Chou模型。Chou模型的推导做出了如下假设: (1)气动肌肉是圆柱体,不考虑肌肉两端的非圆柱体接头: (2)肌肉内部的所有摩擦力全部忽略; (3)肌肉运动过程中储存在橡胶管中的弹性力全部忽略: (3)编织网是不可伸缩的,并且假设始终与橡胶管接触。 根据假设(1),肌肉中各参数的几何关系如式(2-1)所示,各个参数的含义见 图2-1。 L=b coso,nD=b sine,Dv 4m2 (2-1) nπ 式中 0一编织网线与中心轴之间的夹角: L一气动肌肉的长度: D—气动肌肉的直径: 根编织线缠绕肌肉的圈数: b。一根不可伸缩的编织线的长度: V—肌肉的内部体积。 -10-
哈尔滨工业大学工学硕士学位论文 - 10 - 第 2 章 气动人工肌肉的静态模型建立 2.1 引言 气动人工肌肉(PAM)的迟滞现象和输出力对充入压力和收缩长度的非线性 使得其控制器的设计比较困难。为了便于肌肉控制器的设计,必须得出拉力与 压力和长度的准确关系式,即气动人工肌肉的数学模型。但是,影响肌肉特性 的因素很多,如橡胶管的弹性,编织网的摩擦等等,因此要得到准确的数学模 型是非常困难的。现今被广泛认可的气动肌肉数学模型是 Chou-Hannaford 和 Tondu-Lopez 的理想数学模型,但其与实际有较大的出入。本章在考虑影响肌 肉特性的各种因素基础上,对理想模型加以改进建立了较完整的气动肌肉理论 数学模型。此外,提出一种基于实验的建立 PAM 经验模型的方法,并利用此 方法建立了肌肉的经验模型,设计验证实验确定此种模型的准确性和简便性。 2.2 气动人工肌肉的理论数学模型建立 2.2.1 气动肌肉理想模型建立 所有的气动肌肉理论模型都是以 Chou 的模型为基础的。因此,在本章的 开始先简单的推导出 Chou 模型。Chou 模型的推导做出了如下假设: (1) 气动肌肉是圆柱体,不考虑肌肉两端的非圆柱体接头; (2) 肌肉内部的所有摩擦力全部忽略; (3) 肌肉运动过程中储存在橡胶管中的弹性力全部忽略; (3) 编织网是不可伸缩的,并且假设始终与橡胶管接触。 根据假设(1),肌肉中各参数的几何关系如式(2-1)所示,各个参数的含义见 图 2-1。 L = b0 cosq , npD = b0 sinq , np b L D 2 2 0 - = , L n b L V 2 2 2 0 4p - = (2-1) 式中 q ——编织网线与中心轴之间的夹角; L ——气动肌肉的长度; D——气动肌肉的直径; n ——根编织线缠绕肌肉的圈数; b0 ——根不可伸缩的编织线的长度; V ——肌肉的内部体积
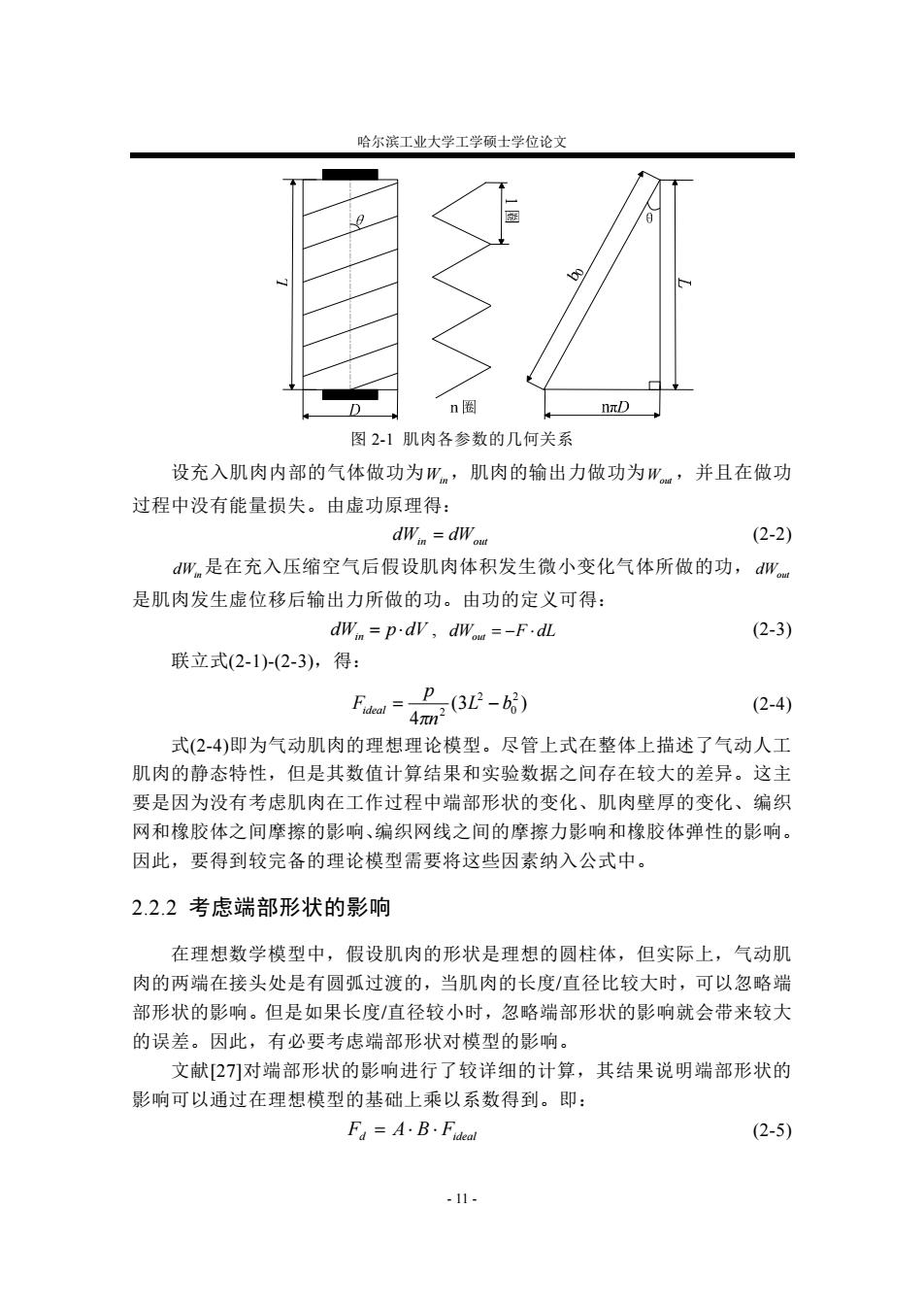
哈尔滨工业大学工学硕士学位论文 n圈 nπD 图2-1肌肉各参数的几何关系 设充入肌肉内部的气体做功为W,肌肉的输出力做功为W,,并且在做功 过程中没有能量损失。由虚功原理得: dw =dWou (2-2) dwn是在充入压缩空气后假设肌肉体积发生微小变化气体所做的功,dW 是肌肉发生虚位移后输出力所做的功。由功的定义可得: dWn=pdW,dWoa--F·dL (2-3) 联立式(2-1)-(2-3),得: 40n3rP-) Fdcal, (2-4) 式(2-4)即为气动肌肉的理想理论模型。尽管上式在整体上描述了气动人工 肌肉的静态特性,但是其数值计算结果和实验数据之间存在较大的差异。这主 要是因为没有考虑肌肉在工作过程中端部形状的变化、肌肉壁厚的变化、编织 网和橡胶体之间摩擦的影响、编织网线之间的摩擦力影响和橡胶体弹性的影响。 因此,要得到较完备的理论模型需要将这些因素纳入公式中。 2.2.2考虑端部形状的影响 在理想数学模型中,假设肌肉的形状是理想的圆柱体,但实际上,气动肌 肉的两端在接头处是有圆弧过渡的,当肌肉的长度/直径比较大时,可以忽略端 部形状的影响。但是如果长度/直径较小时,忽略端部形状的影响就会带来较大 的误差。因此,有必要考虑端部形状对模型的影响。 文献2]对端部形状的影响进行了较详细的计算,其结果说明端部形状的 影响可以通过在理想模型的基础上乘以系数得到。即: Fa=A·B.Fideal (2-5) -11-
哈尔滨工业大学工学硕士学位论文 - 11 - 图 2-1 肌肉各参数的几何关系 设充入肌肉内部的气体做功为Win,肌肉的输出力做功为Wout ,并且在做功 过程中没有能量损失。由虚功原理得: dWin = dWout (2-2) dWin是在充入压缩空气后假设肌肉体积发生微小变化气体所做的功, dWout 是肌肉发生虚位移后输出力所做的功。由功的定义可得: dWin = p ×dV , dWout = -F ×dL (2-3) 联立式(2-1)-(2-3),得: (3 ) 4 2 0 2 2 L b n p Fideal = - p (2-4) 式(2-4)即为气动肌肉的理想理论模型。尽管上式在整体上描述了气动人工 肌肉的静态特性,但是其数值计算结果和实验数据之间存在较大的差异。这主 要是因为没有考虑肌肉在工作过程中端部形状的变化、肌肉壁厚的变化、编织 网和橡胶体之间摩擦的影响、编织网线之间的摩擦力影响和橡胶体弹性的影响。 因此,要得到较完备的理论模型需要将这些因素纳入公式中。 2.2.2 考虑端部形状的影响 在理想数学模型中,假设肌肉的形状是理想的圆柱体,但实际上,气动肌 肉的两端在接头处是有圆弧过渡的,当肌肉的长度/直径比较大时,可以忽略端 部形状的影响。但是如果长度/直径较小时,忽略端部形状的影响就会带来较大 的误差。因此,有必要考虑端部形状对模型的影响。 文献[27]对端部形状的影响进行了较详细的计算,其结果说明端部形状的 影响可以通过在理想模型的基础上乘以系数得到。即: Fd A B Fideal = × × (2-5)
哈尔滨工业大学工学硕士学位论文 式中 A、 nπcos0+sin0。 2nπcos0+siin0 ,-。-) 3 B=- Lo D-D。 μ D 2.2.3考虑编织网和橡胶体之间摩擦的影响 编制网线和橡胶体之间的摩擦作用是导致肌肉出现迟滞现象的主要原因。 在理想模型中没有考虑这个因素,因此导致模型在计算中没有显示出肌肉的迟 滞现象。FESTO公司生产的气动肌肉在整个圆柱体上编织网和橡胶体完全接 触,这样导致两者之间的压力完全由肌肉内部气体提供。由摩擦力的计算公式 可得: Fr=f-rpπDL (2-6) 式中∫,一编织网和橡胶体之间的摩擦系数。 2.2.4考虑编织网线之间摩擦的影响 在肌肉的收缩和伸展过程中,编织网线之间存在相对运动,从而会产生摩 擦力,这也会影响到肌肉的输出特性。文献[28]对此种运动规律进行分析,得 出了网线之间运动过程中的接触面积S,。于是可以得出摩擦力的计算公式为: F=fS-P (2-7) 式中Ss-s=πDL0 sino (1-8)N1-(1-e)2cos20 ∫-,—编织网线之间的摩擦系数。 2.2.5考虑橡胶体弹性和肌肉壁厚的影响 为了提高模型的准确性,橡胶体的弹性和壁厚是必须考虑的。橡胶体为弹 性材料,其输出特性为非线性,而弹性体的非线性特性的确定是很困难的。本 文引入Mooney-Rivlin模型来计算橡胶体的弹性力。在此设橡胶体是各向同性、 不可压缩的高分子材料。 Mooney-Rivlin模型可表示为: -12-
哈尔滨工业大学工学硕士学位论文 - 12 - 式中 p q q p q q n siin n A + + = 2 cos 2 cos sin 0 ; 0 0 2 0 ( ) 3 1 L L L L B - - = m ; D D - D0 m = 。 2.2.3 考虑编织网和橡胶体之间摩擦的影响 编制网线和橡胶体之间的摩擦作用是导致肌肉出现迟滞现象的主要原因。 在理想模型中没有考虑这个因素,因此导致模型在计算中没有显示出肌肉的迟 滞现象。FESTO 公司生产的气动肌肉在整个圆柱体上编织网和橡胶体完全接 触,这样导致两者之间的压力完全由肌肉内部气体提供。由摩擦力的计算公式 可得: Fs-r = f s-r ppDL (2-6) 式中 s r f - ——编织网和橡胶体之间的摩擦系数。 2.2.4 考虑编织网线之间摩擦的影响 在肌肉的收缩和伸展过程中,编织网线之间存在相对运动,从而会产生摩 擦力,这也会影响到肌肉的输出特性。文献[28]对此种运动规律进行分析,得 出了网线之间运动过程中的接触面积 Ss-s 。于是可以得出摩擦力的计算公式为: Fs-s = f s-s Ss-s p (2-7) 式中 e e q q p 2 2 0 0 0 (1 ) 1 (1 ) cos sin - - - SS -S = D L ; s s f - ——编织网线之间的摩擦系数。 2.2.5 考虑橡胶体弹性和肌肉壁厚的影响 为了提高模型的准确性,橡胶体的弹性和壁厚是必须考虑的。橡胶体为弹 性材料,其输出特性为非线性,而弹性体的非线性特性的确定是很困难的。本 文引入 Mooney-Rivlin 模型来计算橡胶体的弹性力。在此设橡胶体是各向同性、 不可压缩的高分子材料。 Mooney-Rivlin 模型可表示为: