哈尔滨工业大学工学硕士学位论文 率高。 以上所述机器人均为连续跳跃式机器人,其地面停留时间很短,姿势的调 整和能量的补充都在腾空阶段完成。此种运动方式的优点是能量利用率高,但 这种跳跃方式在单次跳跃距离和高度上很难得到提高。 图1-3二维Bow Leg机器人 图1-4三维Bow Leg机器人 间歇式跳跃机器人可以简化跳跃控制过程,在地面的停留期间完成姿态的 调整和能量的补充,着重于单次跳跃性能的研究。由于有充分的时间完成起跳 准备工作,因此能够更有效的设计机器人的结构以及驱动模式,从而大幅度提 高机器人的跳跃水平。 间歇跳跃机器人中比较典型的是美国NASA喷气动力实验室研制的用于空 间探索的三代间歇型跳跃机器人门。如图1-5至图1-7所示。 图1-5NASA的第一代 图1-6NASA的第二代 图1-7NASA的第三代 弹跳机 弹跳机 弹跳机 三代机器人均为弹簧驱动,且从第二代开始设计了一种弹簧六连杆机构驱 动单元,从而使得弹簧利用率相较于第一代提高了20%1。第二代的这种弹跳 方式是模仿青蛙的运动方式,其机构由一个直流电机驱动,通过电机正反转配 合离合器,使电机在不同时段与不同机构啮合,完成不同动作,但是这种机构 -3
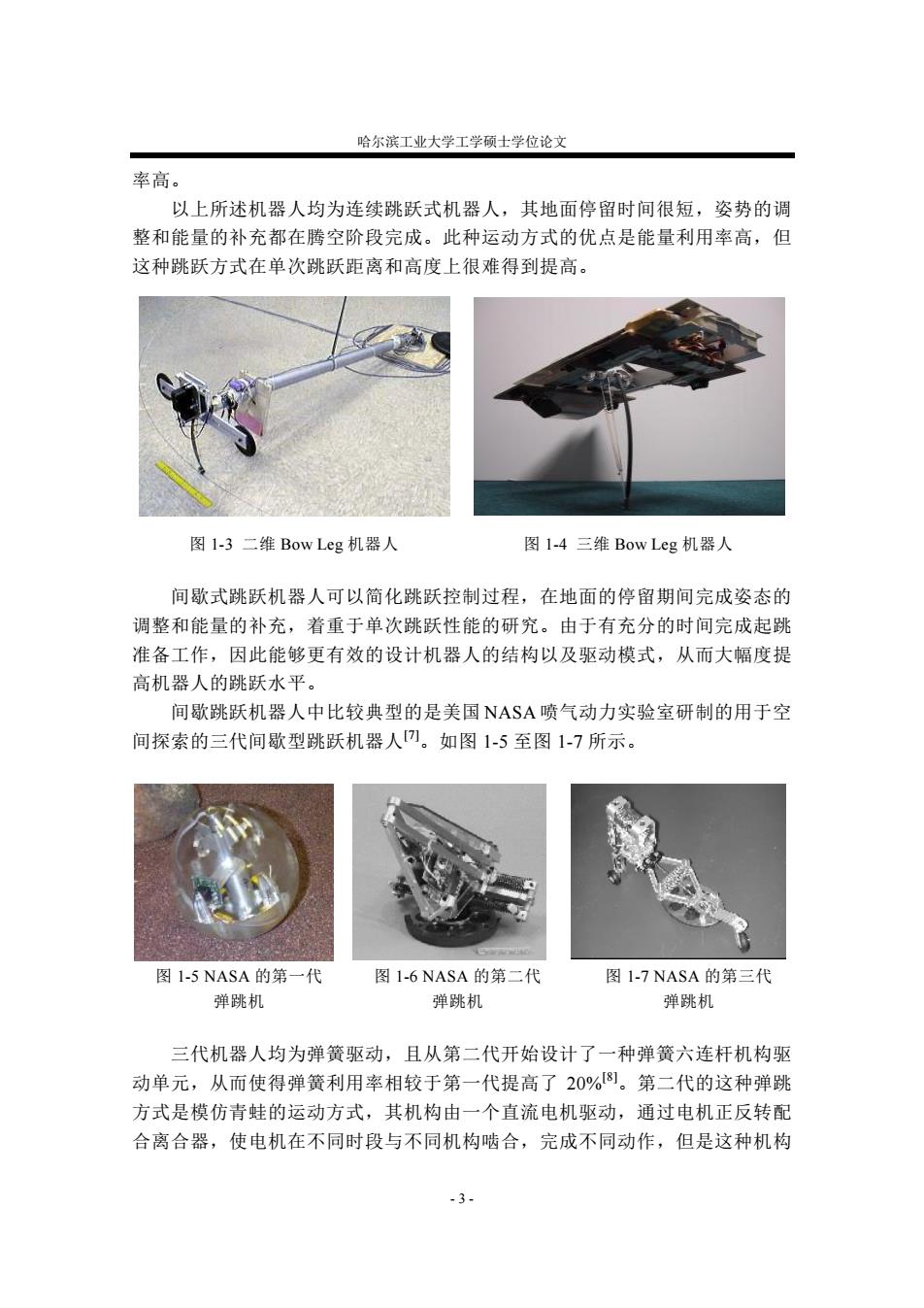
哈尔滨工业大学工学硕士学位论文 - 3 - 率高。 以上所述机器人均为连续跳跃式机器人,其地面停留时间很短,姿势的调 整和能量的补充都在腾空阶段完成。此种运动方式的优点是能量利用率高,但 这种跳跃方式在单次跳跃距离和高度上很难得到提高。 图 1-3 二维 Bow Leg 机器人 图 1-4 三维 Bow Leg 机器人 间歇式跳跃机器人可以简化跳跃控制过程,在地面的停留期间完成姿态的 调整和能量的补充,着重于单次跳跃性能的研究。由于有充分的时间完成起跳 准备工作,因此能够更有效的设计机器人的结构以及驱动模式,从而大幅度提 高机器人的跳跃水平。 间歇跳跃机器人中比较典型的是美国 NASA 喷气动力实验室研制的用于空 间探索的三代间歇型跳跃机器人[7]。如图 1-5 至图 1-7 所示。 图 1-5 NASA 的第一代 弹跳机 图 1-6 NASA 的第二代 弹跳机 图 1-7 NASA 的第三代 弹跳机 三代机器人均为弹簧驱动,且从第二代开始设计了一种弹簧六连杆机构驱 动单元,从而使得弹簧利用率相较于第一代提高了 20%[8]。第二代的这种弹跳 方式是模仿青蛙的运动方式,其机构由一个直流电机驱动,通过电机正反转配 合离合器,使电机在不同时段与不同机构啮合,完成不同动作,但是这种机构
哈尔滨工业大学工学硕士学位论文 不能调整起跳角度,在平坦地面的移动性不好,。鉴于第二代的不足,NASA设 计了第三代跳跃机,它将轮式和弹跳方式结合,从而增加了机器人的机动性, 对坏境的适应能力也得到了提高。第三代机器人系统集成了嵌入式控制器可进 行复杂的在线计算与控制,并可与外界通过无线通信,其机动性以及执行任务 的能力得到加强。机构前端带有微型摄像机,向用户PC机上传送图像,用户 工作站通过两条无线链路与机构联系:一条全双工通道用于与跳跃机构交换命 令与数据,另一条用于下载机载摄像机拍下的图像。 上述仿生机器人的研制都是通过特定的机构实现了生物体的跳跃功能,这 种机器人的结构形式和驱动控制系统相对简单,但是从形态上看,并不具有生 物体的形态。与此不同,从生物形态上进行仿生的机器人具有和生物体相似的 结构形式,研究方向也着重于生物体的生物肌骨骼系统,这种方式下建立的跳 跃机器人模型及控制系统相对来说是比较复杂的。 如图l-8所示的机器狗KenKen,该机器人由日本东京大学研制,模拟狗腿 部肌腱的工作原理,它有关节形结构腿,用两个液压驱动作为肌肉,用弹簧 作为腱,弹簧的作用就像腓肠肌或是跖肌,靠膝关节传递的能量使机器人向前 运动。从2007年开始,Yasuo Kuniyoshi等人研制了如图1-9所示的双足跳跃机 器人Athlete Robot,该机器人的驱动采用气动驱动,带有双关节机构,从肌骨 骼系统上模拟人的跳跃运动10-1)。 图l-8机器狗KenKen 图l-9 Athlete Robot 东京大学还研制了气动跳跃机器人Mowglitio],如图1-10所示,它的驱动 完全由气动肌肉实现,故其控制系统的对象为气动肌肉,在跳跃过程中气动肌 肉的控制为开环控制,其跳跃过程如图1-11所示。 1.2.2国内研究现状 目前,国内的跳跃机器人研究己初具规模。上海交通大学的杨煌普等人研 -4-
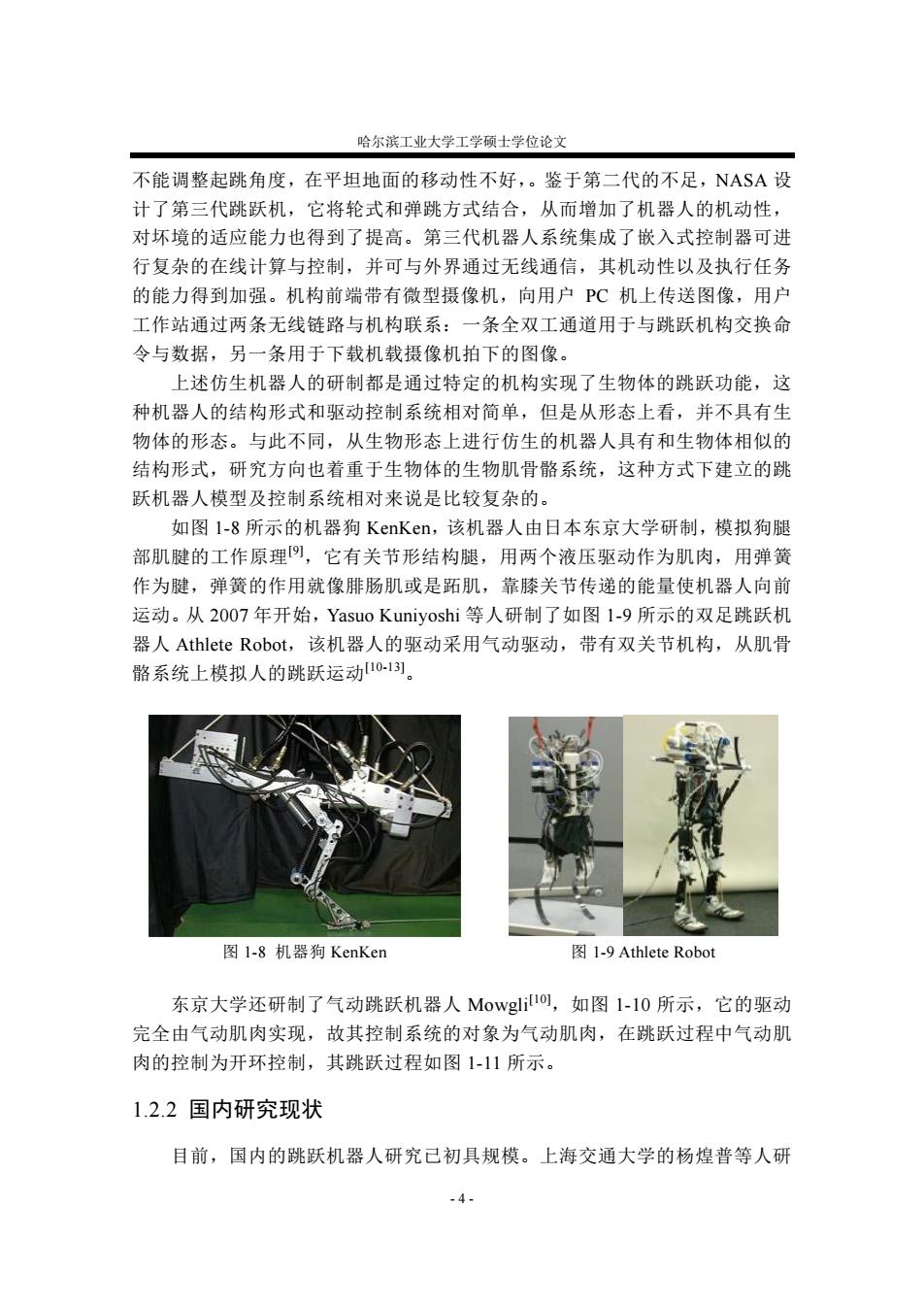
哈尔滨工业大学工学硕士学位论文 - 4 - 不能调整起跳角度,在平坦地面的移动性不好,。鉴于第二代的不足,NASA 设 计了第三代跳跃机,它将轮式和弹跳方式结合,从而增加了机器人的机动性, 对坏境的适应能力也得到了提高。第三代机器人系统集成了嵌入式控制器可进 行复杂的在线计算与控制,并可与外界通过无线通信,其机动性以及执行任务 的能力得到加强。机构前端带有微型摄像机,向用户 PC 机上传送图像,用户 工作站通过两条无线链路与机构联系:一条全双工通道用于与跳跃机构交换命 令与数据,另一条用于下载机载摄像机拍下的图像。 上述仿生机器人的研制都是通过特定的机构实现了生物体的跳跃功能,这 种机器人的结构形式和驱动控制系统相对简单,但是从形态上看,并不具有生 物体的形态。与此不同,从生物形态上进行仿生的机器人具有和生物体相似的 结构形式,研究方向也着重于生物体的生物肌骨骼系统,这种方式下建立的跳 跃机器人模型及控制系统相对来说是比较复杂的。 如图 1-8 所示的机器狗 KenKen,该机器人由日本东京大学研制,模拟狗腿 部肌腱的工作原理[9],它有关节形结构腿,用两个液压驱动作为肌肉,用弹簧 作为腱,弹簧的作用就像腓肠肌或是跖肌,靠膝关节传递的能量使机器人向前 运动。从 2007 年开始,Yasuo Kuniyoshi 等人研制了如图 1-9 所示的双足跳跃机 器人 Athlete Robot,该机器人的驱动采用气动驱动,带有双关节机构,从肌骨 骼系统上模拟人的跳跃运动[10-13]。 图 1-8 机器狗 KenKen 图 1-9 Athlete Robot 东京大学还研制了气动跳跃机器人 Mowgli[10],如图 1-10 所示,它的驱动 完全由气动肌肉实现,故其控制系统的对象为气动肌肉,在跳跃过程中气动肌 肉的控制为开环控制,其跳跃过程如图 1-11 所示。 1.2.2 国内研究现状 目前,国内的跳跃机器人研究已初具规模。上海交通大学的杨煌普等人研
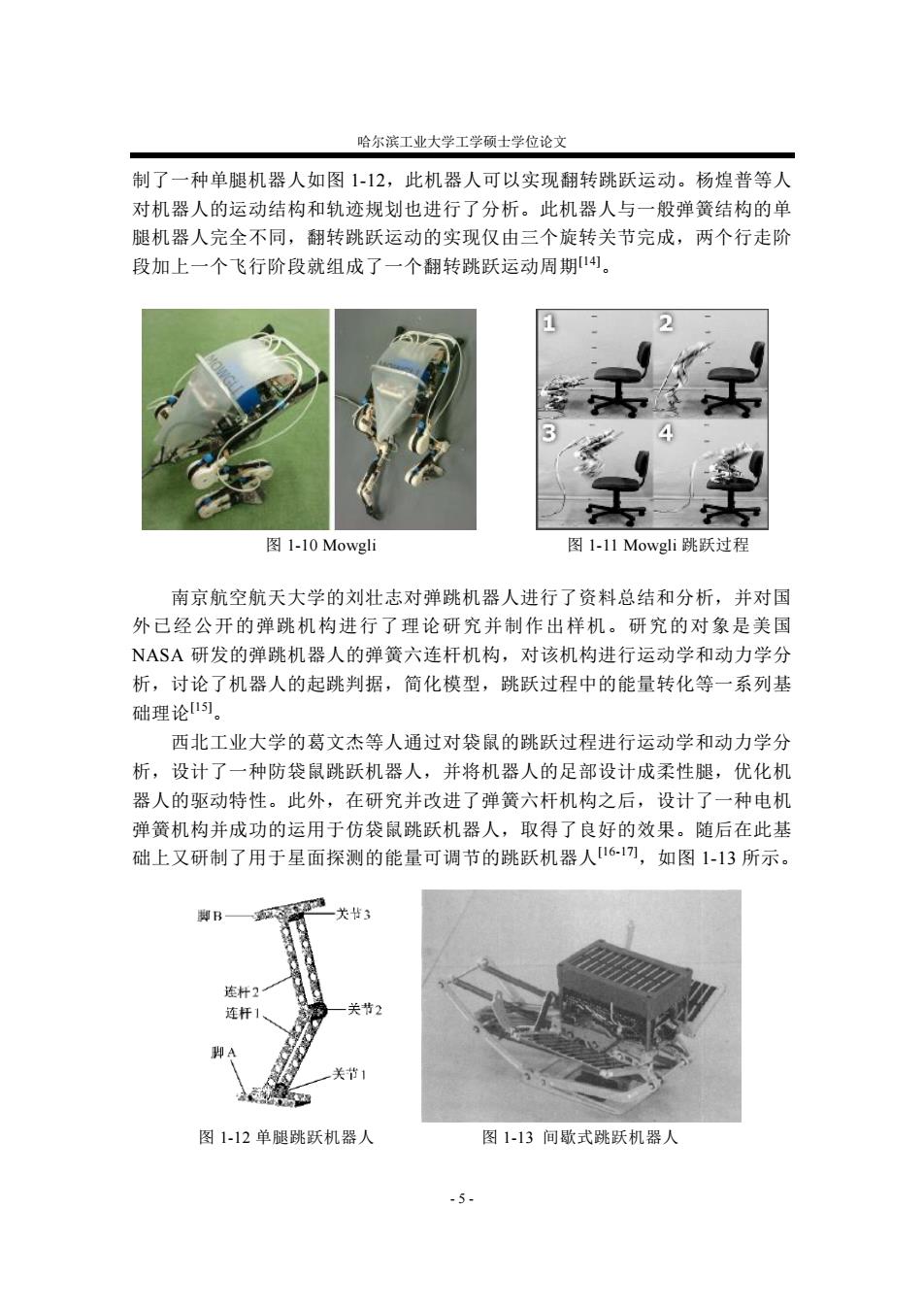
哈尔滨工业大学工学硕士学位论文 制了一种单腿机器人如图1-12,此机器人可以实现翻转跳跃运动。杨煌普等人 对机器人的运动结构和轨迹规划也进行了分析。此机器人与一般弹簧结构的单 腿机器人完全不同,翻转跳跃运动的实现仅由三个旋转关节完成,两个行走阶 段加上一个飞行阶段就组成了一个翻转跳跃运动周期4鬥。 图1-10 Mowgli 图1-11 Mowgli跳跃过程 南京航空航天大学的刘壮志对弹跳机器人进行了资料总结和分析,并对国 外已经公开的弹跳机构进行了理论研究并制作出样机。研究的对象是美国 NASA研发的弹跳机器人的弹簧六连杆机构,对该机构进行运动学和动力学分 析,讨论了机器人的起跳判据,简化模型,跳跃过程中的能量转化等一系列基 础理论]。 西北工业大学的葛文杰等人通过对袋鼠的跳跃过程进行运动学和动力学分 析,设计了一种防袋鼠跳跃机器人,并将机器人的足部设计成柔性腿,优化机 器人的驱动特性。此外,在研究并改进了弹簧六杆机构之后,设计了一种电机 弹簧机构并成功的运用于仿袋鼠跳跃机器人,取得了良好的效果。随后在此基 础上又研制了用于星面探测的能量可调节的跳跃机器人[161),如图1-13所示。 脚B一 关3 连杆2 连杆1, 关节2 关节1 图1-12单腿跳跃机器人 图1-13间歇式跳跃机器人 -5-
哈尔滨工业大学工学硕士学位论文 - 5 - 制了一种单腿机器人如图 1-12,此机器人可以实现翻转跳跃运动。杨煌普等人 对机器人的运动结构和轨迹规划也进行了分析。此机器人与一般弹簧结构的单 腿机器人完全不同,翻转跳跃运动的实现仅由三个旋转关节完成,两个行走阶 段加上一个飞行阶段就组成了一个翻转跳跃运动周期[14]。 图 1-10 Mowgli 图 1-11 Mowgli 跳跃过程 南京航空航天大学的刘壮志对弹跳机器人进行了资料总结和分析,并对国 外已经公开的弹跳机构进行了理论研究并制作出样机。研究的对象是美国 NASA 研发的弹跳机器人的弹簧六连杆机构,对该机构进行运动学和动力学分 析,讨论了机器人的起跳判据,简化模型,跳跃过程中的能量转化等一系列基 础理论[15]。 西北工业大学的葛文杰等人通过对袋鼠的跳跃过程进行运动学和动力学分 析,设计了一种防袋鼠跳跃机器人,并将机器人的足部设计成柔性腿,优化机 器人的驱动特性。此外,在研究并改进了弹簧六杆机构之后,设计了一种电机 弹簧机构并成功的运用于仿袋鼠跳跃机器人,取得了良好的效果。随后在此基 础上又研制了用于星面探测的能量可调节的跳跃机器人[16-17],如图 1-13 所示。 图 1-12 单腿跳跃机器人 图 1-13 间歇式跳跃机器人
哈尔滨工业大学工学硕士学位论文 北方工业大学的李涛采用弹簧拨杆机构设计了一种仿青蛙跳跃机器人,该 机器人利用电机对弹簧储存能量,机构简单轻巧,如图1-14所示8) 哈尔滨工业大学的王猛等人通过对生物青蛙的运动规律和跳跃运动中关节 运动轨迹的信息进行提取,研制了一种利用弹簧五杆机构腿进行跳跃,以电机 为驱动的仿青蛙跳弹机器人,如图1-15所示。并对机器人在跳跃过程中的各个 运动阶段进行了运动学和动力学分析,对弹簧五杆机构的动力学特性进行了详 细分析,运用遗传算法进行运动轨迹规划,建立了一套多传感器信息平台,并 在跳跃运动中控制机器人的稳定性。控制方式上采用半自主控制方式,即由 操作人员在控制终端发出任务指令,机器人独立实现姿态调整和跳跃,并将工 作状态信息实时反馈给控制终端的控制体系结构。 1.3气动人工肌肉概述 在过去的20年中,气动人工肌肉得到了全世界研究人员的广泛关注。这种 气动肌肉最早是在上世纪50年代由美国医生JosePh L.McKibben发明用来作为 临床康复理疗的假肢的驱动器。但是,由于当时气体储存的困难和控制方法的 匮乏,再加上电机驱动器的绝对优势,人工肌肉并没有得到研究人员的关注和 认可。近些年来,气动肌肉得到了广泛的关注,这主要是由于气动人工肌肉有 着许多明显的优点,它的结构简单,柔顺性好,动作平滑,输出力/自重比大, 噪音小202。这些优点完全符合医疗机械对于驱动器的要求23-251。 图1-14北方工业大学仿青蛙跳跃机器人 图1-15哈工大仿青蛙跳跃机器人 现在使用的气动肌肉一般为McKibben型气动肌肉。这种气动肌肉的主要 动作部件是一个橡胶管,内部中空可以充入压缩空气,橡胶管的外层被高强度 的编织网包裹,当内部充入压缩空气时,肌肉轴向收缩产生收缩力。肌肉的两 端接两个接头以固定橡胶管,其中一个接头上开孔作为肌肉内部和气缸压缩空 气的连接口,另一端连接负载。实物如图1-16所示。肌肉的形式可以多种多样, -6
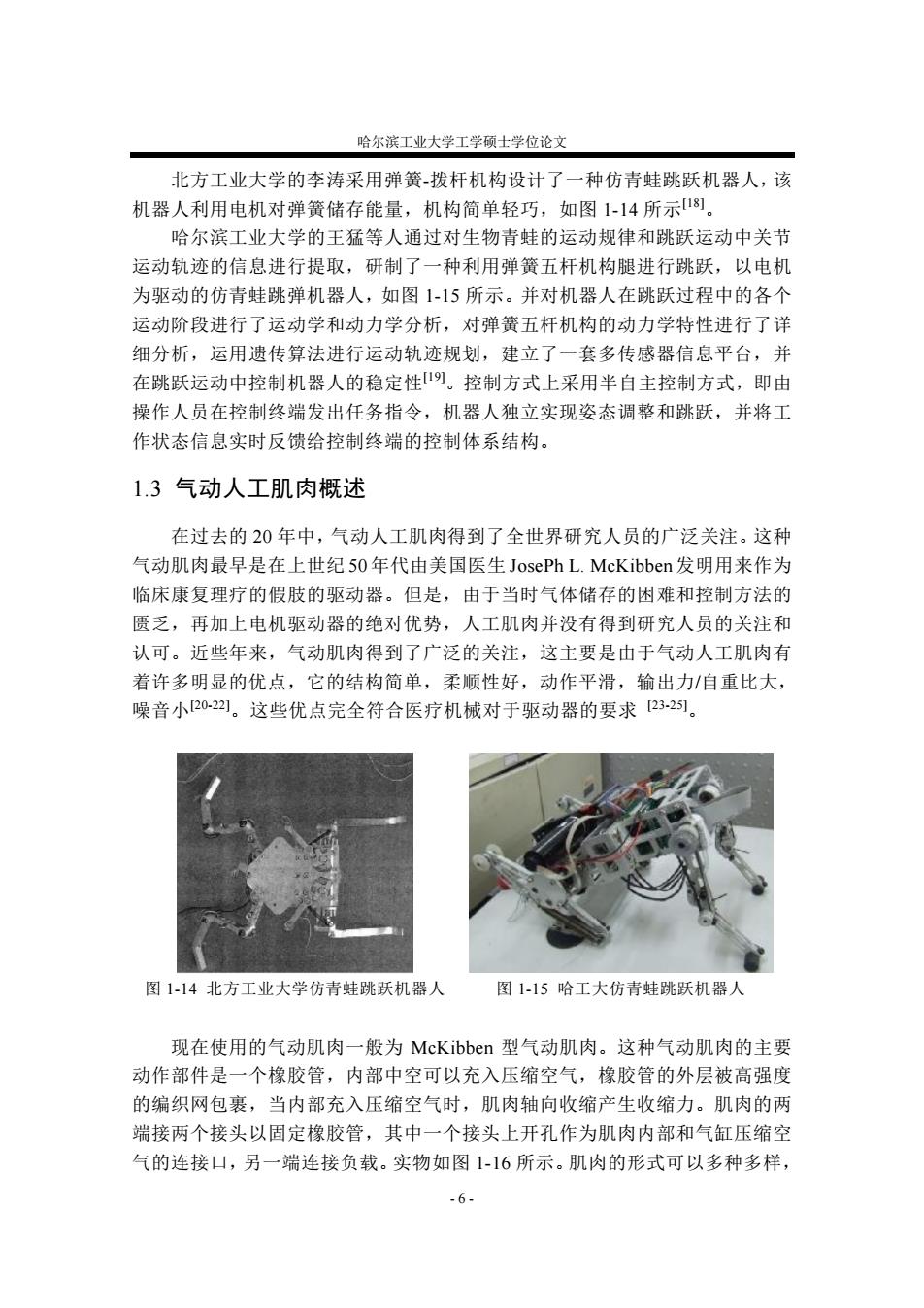
哈尔滨工业大学工学硕士学位论文 - 6 - 北方工业大学的李涛采用弹簧-拨杆机构设计了一种仿青蛙跳跃机器人,该 机器人利用电机对弹簧储存能量,机构简单轻巧,如图 1-14 所示[18]。 哈尔滨工业大学的王猛等人通过对生物青蛙的运动规律和跳跃运动中关节 运动轨迹的信息进行提取,研制了一种利用弹簧五杆机构腿进行跳跃,以电机 为驱动的仿青蛙跳弹机器人,如图 1-15 所示。并对机器人在跳跃过程中的各个 运动阶段进行了运动学和动力学分析,对弹簧五杆机构的动力学特性进行了详 细分析,运用遗传算法进行运动轨迹规划,建立了一套多传感器信息平台,并 在跳跃运动中控制机器人的稳定性[19]。控制方式上采用半自主控制方式,即由 操作人员在控制终端发出任务指令,机器人独立实现姿态调整和跳跃,并将工 作状态信息实时反馈给控制终端的控制体系结构。 1.3 气动人工肌肉概述 在过去的 20 年中,气动人工肌肉得到了全世界研究人员的广泛关注。这种 气动肌肉最早是在上世纪 50 年代由美国医生 JosePh L. McKibben 发明用来作为 临床康复理疗的假肢的驱动器。但是,由于当时气体储存的困难和控制方法的 匮乏,再加上电机驱动器的绝对优势,人工肌肉并没有得到研究人员的关注和 认可。近些年来,气动肌肉得到了广泛的关注,这主要是由于气动人工肌肉有 着许多明显的优点,它的结构简单,柔顺性好,动作平滑,输出力/自重比大, 噪音小[20-22]。这些优点完全符合医疗机械对于驱动器的要求 [23-25]。 图 1-14 北方工业大学仿青蛙跳跃机器人 图 1-15 哈工大仿青蛙跳跃机器人 现在使用的气动肌肉一般为 McKibben 型气动肌肉。这种气动肌肉的主要 动作部件是一个橡胶管,内部中空可以充入压缩空气,橡胶管的外层被高强度 的编织网包裹,当内部充入压缩空气时,肌肉轴向收缩产生收缩力。肌肉的两 端接两个接头以固定橡胶管,其中一个接头上开孔作为肌肉内部和气缸压缩空 气的连接口,另一端连接负载。实物如图 1-16 所示。肌肉的形式可以多种多样
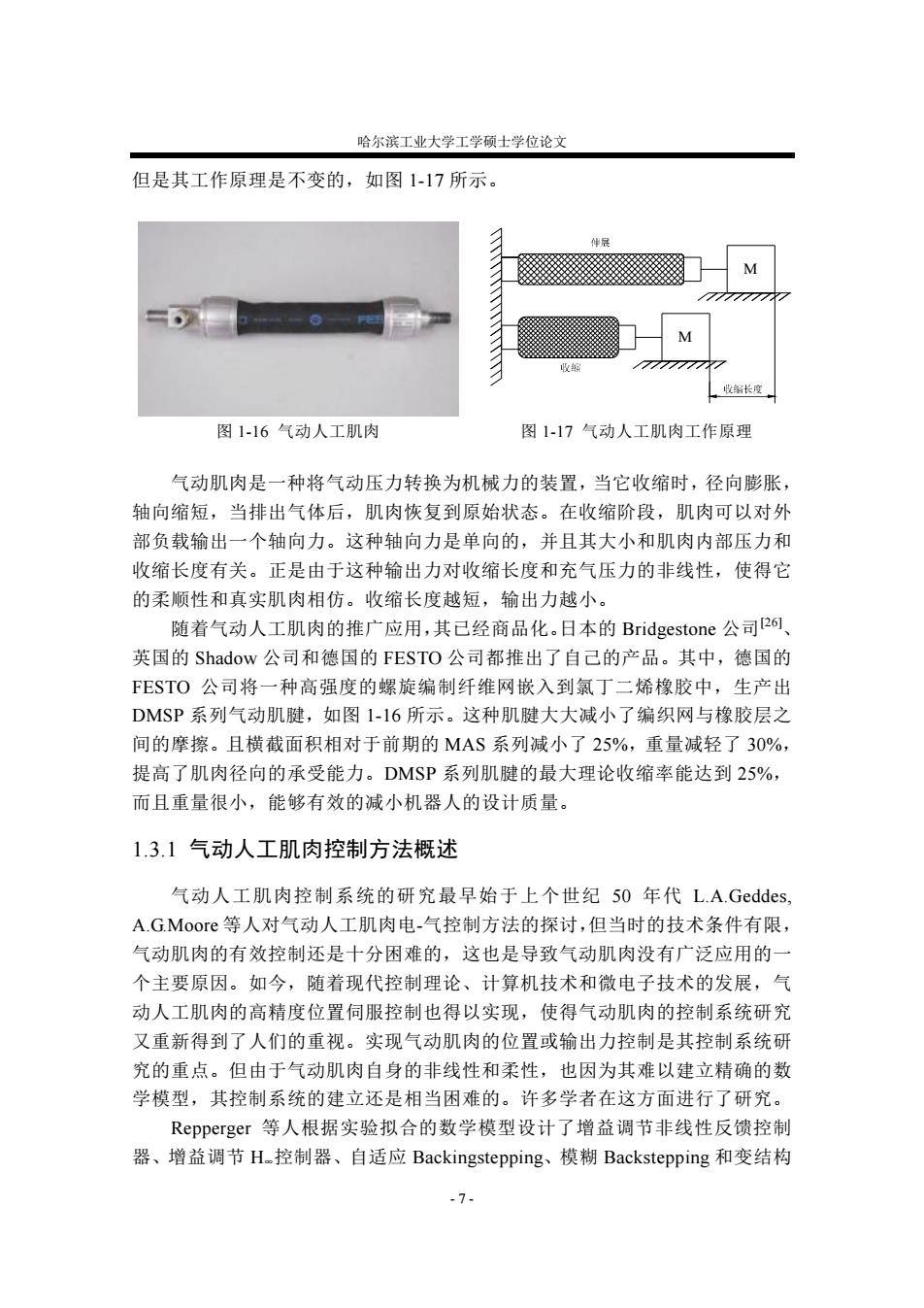
哈尔滨工业大学工学硕士学位论文 但是其工作原理是不变的,如图1-17所示。 伸展 双双双级 收缩 收长度 图1-16气动人工肌肉 图1-17气动人工肌肉工作原理 气动肌肉是一种将气动压力转换为机械力的装置,当它收缩时,径向膨胀, 轴向缩短,当排出气体后,肌肉恢复到原始状态。在收缩阶段,肌肉可以对外 部负载输出一个轴向力。这种轴向力是单向的,并且其大小和肌肉内部压力和 收缩长度有关。正是由于这种输出力对收缩长度和充气压力的非线性,使得它 的柔顺性和真实肌肉相仿。收缩长度越短,输出力越小。 随着气动人工肌肉的推广应用,其已经商品化。日本的Bridgestone公司26、 英国的Shadow公司和德国的FESTO公司都推出了自己的产品。其中,德国的 FESTO公司将一种高强度的螺旋编制纤维网嵌入到氯丁二烯橡胶中,生产出 DMSP系列气动肌腱,如图1-16所示。这种肌腱大大减小了编织网与橡胶层之 间的摩擦。且横截面积相对于前期的MAS系列减小了25%,重量减轻了30%, 提高了肌肉径向的承受能力。DMSP系列肌腱的最大理论收缩率能达到25%, 而且重量很小,能够有效的减小机器人的设计质量。 1.3.1气动人工肌肉控制方法概述 气动人工肌肉控制系统的研究最早始于上个世纪50年代L.A.Geddes, A.G.Moore等人对气动人工肌肉电-气控制方法的探讨,但当时的技术条件有限, 气动肌肉的有效控制还是十分困难的,这也是导致气动肌肉没有广泛应用的一 个主要原因。如今,随着现代控制理论、计算机技术和微电子技术的发展,气 动人工肌肉的高精度位置伺服控制也得以实现,使得气动肌肉的控制系统研究 又重新得到了人们的重视。实现气动肌肉的位置或输出力控制是其控制系统研 究的重点。但由于气动肌肉自身的非线性和柔性,也因为其难以建立精确的数 学模型,其控制系统的建立还是相当困难的。许多学者在这方面进行了研究。 Repperger等人根据实验拟合的数学模型设计了增益调节非线性反馈控制 器、增益调节H控制器、自适应Backingstepping、模糊Backstepping和变结构 -7
哈尔滨工业大学工学硕士学位论文 - 7 - 但是其工作原理是不变的,如图 1-17 所示。 M M 图 1-16 气动人工肌肉 图 1-17 气动人工肌肉工作原理 气动肌肉是一种将气动压力转换为机械力的装置,当它收缩时,径向膨胀, 轴向缩短,当排出气体后,肌肉恢复到原始状态。在收缩阶段,肌肉可以对外 部负载输出一个轴向力。这种轴向力是单向的,并且其大小和肌肉内部压力和 收缩长度有关。正是由于这种输出力对收缩长度和充气压力的非线性,使得它 的柔顺性和真实肌肉相仿。收缩长度越短,输出力越小。 随着气动人工肌肉的推广应用,其已经商品化。日本的 Bridgestone 公司[26]、 英国的 Shadow 公司和德国的 FESTO 公司都推出了自己的产品。其中,德国的 FESTO 公司将一种高强度的螺旋编制纤维网嵌入到氯丁二烯橡胶中,生产出 DMSP 系列气动肌腱,如图 1-16 所示。这种肌腱大大减小了编织网与橡胶层之 间的摩擦。且横截面积相对于前期的 MAS 系列减小了 25%,重量减轻了 30%, 提高了肌肉径向的承受能力。DMSP 系列肌腱的最大理论收缩率能达到 25%, 而且重量很小,能够有效的减小机器人的设计质量。 1.3.1 气动人工肌肉控制方法概述 气动人工肌肉控制系统的研究最早始于上个世纪 50 年代 L.A.Geddes, A.G.Moore 等人对气动人工肌肉电-气控制方法的探讨,但当时的技术条件有限, 气动肌肉的有效控制还是十分困难的,这也是导致气动肌肉没有广泛应用的一 个主要原因。如今,随着现代控制理论、计算机技术和微电子技术的发展,气 动人工肌肉的高精度位置伺服控制也得以实现,使得气动肌肉的控制系统研究 又重新得到了人们的重视。实现气动肌肉的位置或输出力控制是其控制系统研 究的重点。但由于气动肌肉自身的非线性和柔性,也因为其难以建立精确的数 学模型,其控制系统的建立还是相当困难的。许多学者在这方面进行了研究。 Repperger 等人根据实验拟合的数学模型设计了增益调节非线性反馈控制 器、增益调节 H∞控制器、自适应 Backingstepping、模糊 Backstepping 和变结构