
第1章绪论 跳跃机理进行了四十多年的研究,并在2003年发表于《Nature》中的论文指出:长腿跳跃 生物(袋鼠、青蛙等)的跳跃运动采用杠杆原理,可以将较小的力转化成较大的功,从而 使身体获得较大的起跳速度;对于短腿跳跃生物(跳蚤等)通过直接弹射的方式实现跳跃 四.值得一提的是,虽然螽斯和蝗虫具有相似的外形,但它们的跳跃机理并不相同,其中 螽斯(bush cricket)跳跃是采用杠杆原理,而蝗虫(grasshopper)的跳跃兼有杠杆和弹射 原理相结合的特点。 12.2国内跳跃生物及其跳跃机理研究现状 近年来国内的研究人员对生物跳跃也进行了一些研究,其中北京航空航天大学的陈殿 生教授等人通过高速摄像技术获取蝗虫跳跃运动轨迹,并将蝗虫抽象为伪刚体模型,并对 其半周期跳跃过程进行运动学分析求解,求解结果与蝗虫的空中姿态具有一定的相似性), 浙江大学付新课题组李霏等人以叶蝉为生物学研究对象,基于高速摄像技术与图像分 析方法,获得叶蝉跳跃过程中的腿部运动和身体加速特征,将提取的运动参数用于研究叶 蝉跳跃,并建立了叶蝉跳跃运动的理论模型242 哈尔滨工业大学的王猛等人利用高速摄像技术对青蛙的跳跃进行了研究,获取青蛙跳 跃运动过程中的关节转角,并利用虚拟样机技术对青蛙跳跃运动进行了动力学建模分析2?, 图1.5蝗虫跳跃运动图像2例 图1.6叶蝉跳跃运动过程图像P4 13跳跃机器人的发展与研究现状 1.3.1跳跃机器人起源 世界上最早的以跳跃为运动方式的机器人是由麻省理工学院Raibert等人于1981年研 制完成的。该跳跃机器人腿部装有具有弹簧功能的气缸,通过控制器来控制弹跳高度和姿 态,该机构无法保持静态平衡,但为机器人的运动提供了一种全新的方式29:3训。从此,越 4
第1章绪论 跳跃机理进行了四十多年的研究,并在2003年发表于((Nature))中的论文指出:长腿跳跃 生物(袋鼠、青蛙等)的跳跃运动采用杠杆原理,可以将较小的力转化成较大的功,从而 使身体获得较大的起跳速度;对于短腿跳跃生物(跳蚤等)通过直接弹射的方式实现跳跃 【221。值得一提的是,虽然螽斯和蝗虫具有相似的外形,但它们的跳跃机理并不相同,其中 螽斯(bush cricket)跳跃是采用杠杆原理,而蝗虫(grasshopper)的跳跃兼有杠杆和弹射 原理相结合的特点。 1.2.2国内跳跃生物及其跳跃机理研究现状 近年来国内的研究人员对生物跳跃也进行了一些研究,其中北京航空航天大学的陈殿 生教授等人通过高速摄像技术获取蝗虫跳跃运动轨迹,并将蝗虫抽象为伪刚体模型,并对 其半周期跳跃过程进行运动学分析求解,求解结果-9蝗虫的空中姿态具有一定的相似性‘231。 浙江大学付新课题组李霏等人以叶蝉为生物学研究对象,基于高速摄像技术-9图像分 析方法,获得叶蝉跳跃过程中的腿部运动和身体加速特征,将提取的运动参数用于研究叶 蝉跳跃,并建立了叶蝉跳跃运动的理论模型[24-26]。 哈尔滨X-业大学的王猛等人利用高速摄像技术对青蛙的跳跃进行了研究,获取青蛙跳 跃运动过程中的关节转角,并利用虚拟样机技术对青蛙跳跃运动进行了动力学建模分析【27, 。;m} 二 “150’卜 ≯.夸飞\A飞麓豫黩蟪隆鬻蕊黧怒潮黩 剖》聱夕 志誉蕊訾蕊鬻怠憋尊b叁慧 ▲赢二燃嘲勰藤鳓鑫&0戆鬻毒羹.1懋毒黔卷‘巍糕是! 图1.5蝗虫跳跃运动图像㈣ 图1.6叶蝉跳跃运动过程图像㈣ 1.3跳跃机器人的发展与研究现状 1.3.1跳跃机器人起源 世界上最早的以跳跃为运动方式的机器人是由麻省理工学院Raibert等人于1981年研 制完成的。该跳跃机器人腿部装有具有弹簧功能的气缸,通过控制器来控制弹跳高度和姿 态,该机构无法保持静态平衡,但为机器人的运动提供了一种全新的方式【29-31]。从此,越

第1章绪论 来越多的科研人员开始了跳跃机器人的研究。 1.32跳跃机器人研究 1)单腿跳跃机器人 麻省理工学院Raibert等人研制了单腿跳跃机器人之后,Garth Zeglin等人利用弹性弓 形腿,通过拉伸绳索机构使弓形腿弯曲并驱动钢板弹簧变形存储能量,当弓形腿弯曲到一 定程度时会自动释放绳索,释放能量的同时弓形腿弹回原来的形状,在地面反弹力的作用 下实现跳跃,但该机构具有一定的缺陷,即只能在二维平面内运动B2:3 图1.72 bow leg机器人B 为解决2 D bow leg机器人运动范围不足的问题,C.Jean和Garth Zeglin等人于2001 年在沿用2 bow leg机器人跳跃腿和驱动机构的基础上又研制出3 D bow leg机器人,并 开发了控制系统使其在跳跃运动过程中弓形腿能够始终与地面保持垂直,从而使其在跳跃 过程中能够保证身体动态平衡3.如图1.8所示 图1.83 bow leg机器人B 图1.9 Kenken跳跃样机B 2002年,日本的Hvo教授设计了能够跳跃的单足机器人,模仿狗的后腿,以三根杆 作为机器人的跳跃腿,运用两个液压缸作为驱动肌肉,运用一个弹簧作为肌腱。通过弹簧 提供推动力实现跳跃,并利用肌腱作为落地后的缓冲装置。由于机构自由度较多,为了实 5
第1章绪论 来越多的科研人员开始了跳跃机器人的研究。 1.3.2跳跃机器入研究 1)单腿跳跃机器人 麻省理工学院Raibert等人研制了单腿跳跃机器人之后,Garth Zeglin等人利用弹性弓 形腿,通过拉伸绳索机构使弓形腿弯曲并驱动钢板弹簧变形存储能量,当弓形腿弯曲到一 定程度时会自动释放绳索,释放能量的同时弓形腿弹回原来的形状,在地面反弹力的作用 下实现跳跃,但该机构具有一定的缺陷,即只能在二维平面内运动【32-34]。 图1.7 2D bow leg机器人‘341 为解决2D bow leg机器人运动范围不足的问题,C.Jean和Garth Zeglin等人于2001 年在沿用2D bow leg机器人跳跃腿和驱动机构的基础上又研制出3D bow leg机器人,并 开发了控制系统使其在跳跃运动过程中弓形腿能够始终与地面保持垂直,从而使其在跳跃 过程中能够保证身体动态平衡‘351。如图1.8所示 图1.8 3D bow leg机器人【351 图1.9 Kenken跳跃样机‘361 2002年,日本的Hvon教授设计了能够跳跃的单足机器人,模仿狗的后腿,以三根杆 作为机器人的跳跃腿,运用两个液压缸作为驱动肌肉,运用一个弹簧作为肌腱。通过弹簧 提供推动力实现跳跃,并利用肌腱作为落地后的缓冲装置。由于机构自由度较多,为了实
第1章绪论 现机器人的静态稳定性,在机器人的顶部采用绳索辅助装置保持机构的静态稳定B640),实 验表明,该机构具有一定的跑步和跳跃性能。 2)能够保持静态稳定的跳跃机器人 上述跳跃机器人具有一定的跳跃性能,但它们都不能够保持静态稳定。随着机器人技 术的发展,具有静态稳定功能,控制系统简单的跳跃机器人逐浙涌现出来,最具代表性的 是21世纪初JPL与NASA提出开发新型的弹跳机器人用于星际探索,并发展出三代跳跃 机器人,如图1.10(A-C)所示。在第一代跳跃机器人中,采用透明的外壳包裹机构起缓 冲保护作用,电机驱动螺杆压缩弹簧存储,到一定程度时由特定的机构锁定实现能量存储, 当电机驱动螺杆进一步压缩时,驱动释放机构作用使弹簧瞬间释放能量实现跳跃,且该机 构采用重心倾斜的方法调节机器人的跳跃方向,其垂直跳跃高度为80cm,但在沙土等较 软的地面中无法正常工作;第二代跳跃机器人采用齿轮六杆机构驱动弹簧储能,配有微型 摄像机及传感器采集外界信息,该跳跃机器人重1.3kg,最大跳跃高度为1.8,水平跳 跃距离为2.3-3m;第三代跳跃机器人,在第二代跳跃机器人的基础上添加轮式结构,使 其在平坦地面下采用轮动方式,遇到障碍物时采用跳跃方式越障山,4143 近两年JPL的P.Younse等人又在前面所开发的跳跃机器人的基础上研制了重4.34kg, 具有六条腿的新一代跳跃机器人,六条腿一方面增加了机器人的稳定性,另一方面在跳跃 和落地过程中能够起到一定的缓冲作用。该机器人采用纤维玻璃弹簧(fiberglass spring)布 置在腿的两端以存储能量,通过电机驱动卷简使与腿部末端相连的绳索缠绕在卷筒上,当 需要释放能量时,使与卷筒相连的电磁离合器(electromagnetic clutch)处于分离状态,从而 释放能量实现跳跃,该机构采用谐波传动,配合电磁离合器使该机器人存储的能量动态调 整,采用光电编码器监测卷简所转的圈数,从而控制六条腿的储能量,以调节跳跃高度。 该机器人落地时,通过单向离合器和驱动电机相配合拉动绳索使弯曲的腿保持弯曲状态, 一方面阻止了该跳跃机器人反弹所造成的翻身,另一方面可以吸收部分由于地面冲击带来 的动能,以用于下一次跳跃。该机构运动能力较强,能够实现稳定跳跃,但为完成这些动 作,该机构采用了4个驱动电机。且该机构在能量存储较大的情况下,偶尔会出现绳索打 结的情况44 6
第1章绪论 现机器人的静态稳定性,在机器人的顶部采用绳索辅助装置保持机构的静态稳定[36-401,实 验表明,该机构具有一定的跑步和跳跃性能。 2)能够保持静态稳定的跳跃机器人 上述跳跃机器人具有一定的跳跃性能,但它们都不能够保持静态稳定。随着机器人技 术的发展,具有静态稳定功能,控制系统简单的跳跃机器人逐渐涌现出来,最具代表性的 是21世纪初JPL与NASA提出开发新型的弹跳机器人用于星际探索,并发展出三代跳跃 机器人,如图1.10(A.C)所示。在第一代跳跃机器人中,采用透明的外壳包裹机构起缓 冲保护作用,电机驱动螺杆压缩弹簧存储,到一定程度时由特定的机构锁定实现能量存储, 当电机驱动螺杆进一步压缩时,驱动释放机构作用使弹簧瞬间释放能量实现跳跃,且该机 构采用重心倾斜的方法调节机器人的跳跃方向,其垂直跳跃高度为80 cm,但在沙土等较 软的地面中无法正常工作;第二代跳跃机器人采用齿轮六杆机构驱动弹簧储能,配有微型 摄像机及传感器采集外界信息,该跳跃机器人重1.3 kg,最大跳跃高度为1.8 m,水平跳 跃距离为2.3.3 m;第三代跳跃机器人,在第二代跳跃机器人的基础上添加轮式结构,使 其在平坦地面下采用轮动方式,遇到障碍物时采用跳跃方式越障[1,41.43]。 近两年JPL的R Younse等人又在前面所开发的跳跃机器人的基础上研制了重4.34埏, 具有六条腿的新一代跳跃机器人,六条腿一方面增加了机器人的稳定性,另一方面在跳跃 和落地过程中能够起到一定的缓冲作用。该机器人采用纤维玻璃弹簧(fiberglass spring)布 置在腿的两端以存储能量,通过电机驱动卷筒使与腿部末端相连的绳索缠绕在卷简上,当 需要释放能量时,使与卷筒相连的电磁离合器(electromagnetic clutch)处于分离状态,从而 释放能量实现跳跃,该机构采用谐波传动,配合电磁离合器使该机器人存储的能量动态调 整,采用光电编码器监测卷筒所转的圈数,从而控制六条腿的储能量,以调节跳跃高度。 该机器人落地时,通过单向离合器和驱动电机相配合拉动绳索使弯曲的腿保持弯曲状态, 一方面阻止了该跳跃机器人反弹所造成的翻身,另一方面可以吸收部分由于地面冲击带来 的动能,以用于下一次跳跃。该机构运动能力较强,能够实现稳定跳跃,但为完成这些动 作,该机构采用了4个驱动电机。且该机构在能量存储较大的情况下,偶尔会出现绳索打 结的情况m】
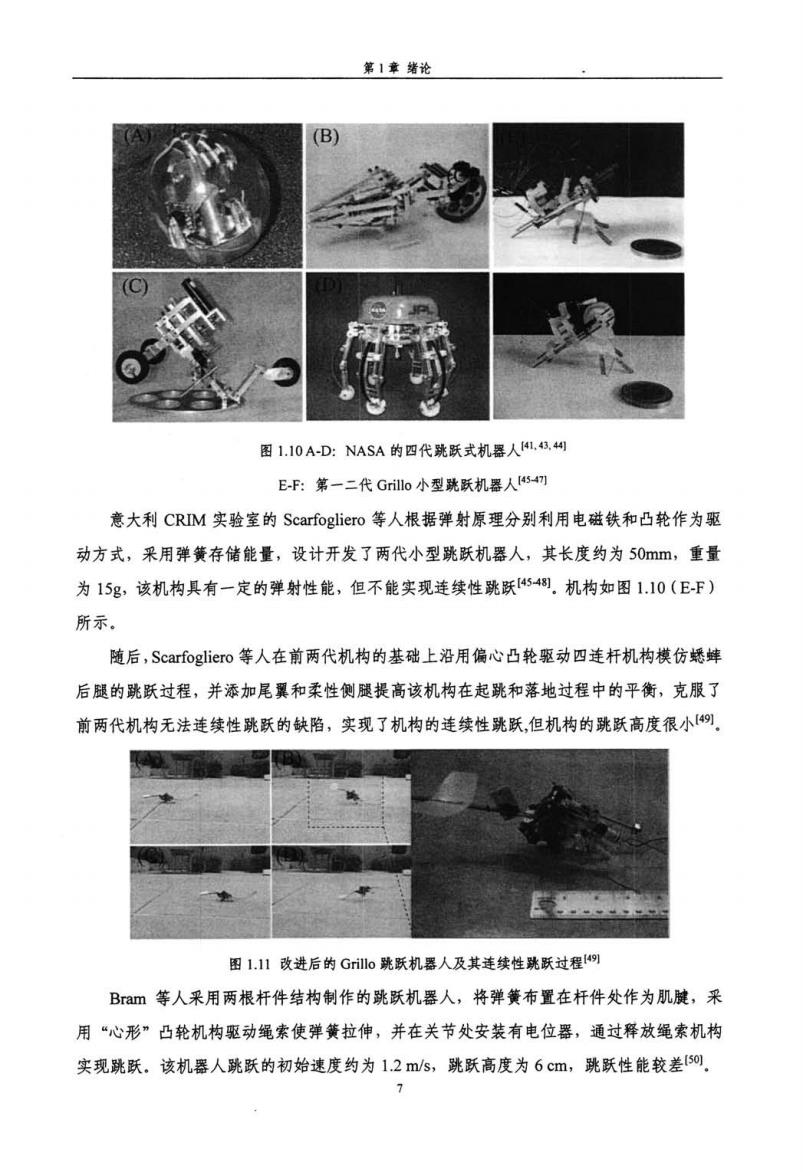
第1章绪论 B 图1.I0A-D:NASA的四代跳跃式机器人1,4 E-F:第一二代Grillo小型跳跃机器人4切 意大利CRM实验室的Scarfogliero等人根据弹射原理分别利用电磁铁和凸轮作为驱 动方式,采用弹簧存储能量,设计开发了两代小型跳跃机器人,其长度约为50mm,重量 为15g,该机构具有一定的弹射性能,但不能实现连续性跳跃454.机构如图1.10(E-F) 所示。 随后,Scarfogliero等人在前两代机构的基础上沿用偏心凸轮驱动四连杆机构模仿蟋蟀 后腿的跳跃过程,并添加尾翼和柔性侧腿提高该机构在起跳和落地过程中的平衡,克服了 前两代机构无法连续性跳跃的缺陷,实现了机构的连续性跳跃,但机构的跳跃高度很小[9。 图1.11改进后的Grillo跳跃机器人及其连续性跳跃过程9, Bram等人采用两根杆件结构制作的跳跃机器人,将弹簧布置在杆件处作为肌腱,采 用“心形”凸轮机构驱动绳索使弹簧拉伸,并在关节处安装有电位器,通过释放绳索机构 实现跳跃.该机器人跳跃的初始速度约为1.2ms,跳跃高度为6cm,跳跃性能较差5o, 7
第1章绪论 图1.10A.D:NASA的四代跳跃式机器人【41,43,44] E.F:第一二代Grillo小型跳跃机器人[45-47】 意大利CRIM实验室的Scarfogliero等人根据弹射原理分别利用电磁铁和凸轮作为驱 动方式,采用弹簧存储能量,设计开发了两代小型跳跃机器人,其长度约为50mm,重量 为159,该机构具有一定的弹射性能,但不能实现连续性跳跃‘45-48]。机构如图1.10(E-F) 所示。 随后,Scarfogliero等人在前两代机构的基础上沿用偏心凸轮驱动四连杆机构模仿蟋蟀 后腿的跳跃过程,并添加尾翼和柔性侧腿提高该机构在起跳和落地过程中的平衡,克服了 前两代机构无法连续性跳跃的缺陷,实现了机构的连续性跳跃,但机构的跳跃高度很小【491。 图1.11改进后的Grillo跳跃机器人及其连续性跳跃过程㈣ Bram等人采用两根杆件结构制作的跳跃机器人,将弹簧布置在杆件处作为肌腱,采 用‘‘J心形”凸轮机构驱动绳索使弹簧拉伸,并在关节处安装有电位器,通过释放绳索机构 实现跳跃。该机器人跳跃的初始速度约为1.2 m/s,跳跃高度为6 cm,跳跃性能较差【501。 7 一躺蒸一 。。,;...穗篓
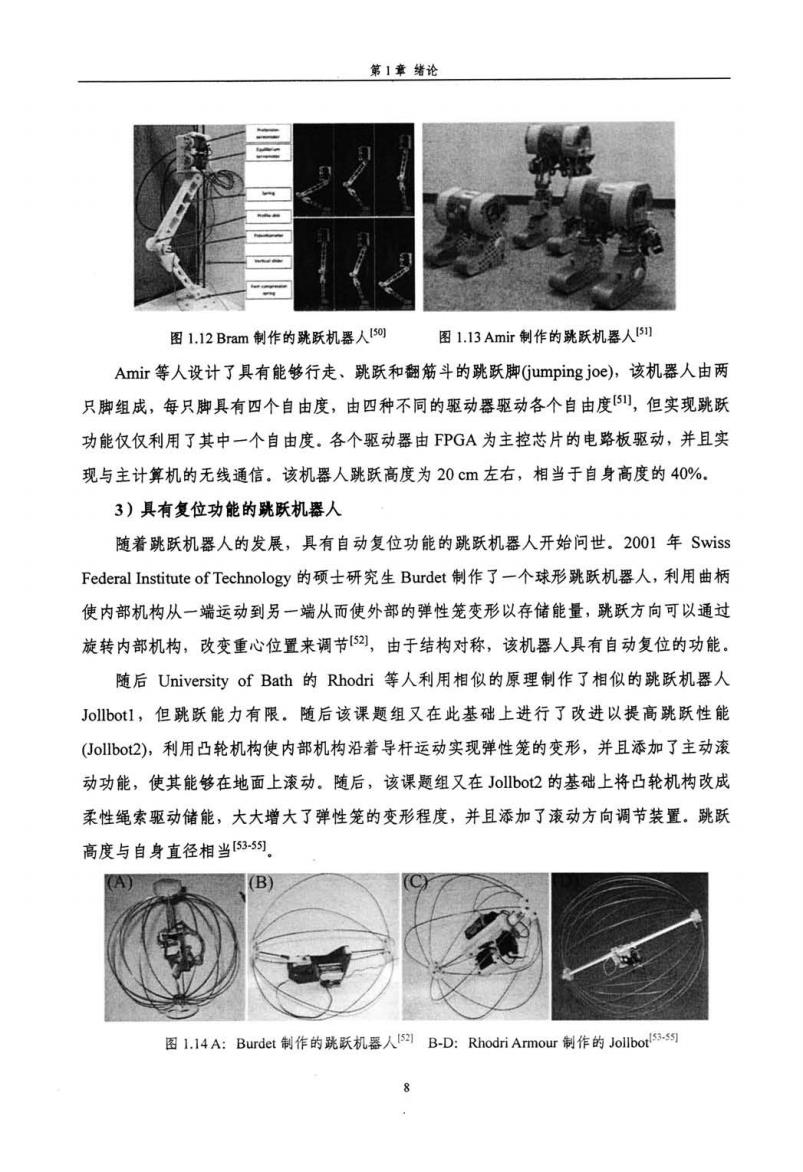
第1章绪论 图1.12Bram制作的跳跃机器人5o 图1.l3Amir制作的跳跃机器人B例 Amir等人设计了具有能够行走、跳跃和翻筋斗的跳跃脚(jumping joe),该机器人由两 只脚组成,每只脚具有四个自由度,由四种不同的驱动器驱动各个自由度创,但实现跳跃 功能仅仅利用了其中一个自由度。各个驱动器由PGA为主控芯片的电路板驱动,并且实 现与主计算机的无线通信。该机器人跳跃高度为20cm左右,相当于自身高度的40%. 3)具有复位功能的跳跃机器人 随着跳跃机器人的发展,具有自动复位功能的跳跃机器人开始问世。2001年Swⅵss Federal Institute of Technology的硕士研究生Burdet制作了一个球形跳跃机器人,利用曲柄 使内部机构从一端运动到另一端从而使外部的弹性笼变形以存储能量,跳跃方向可以通过 旋转内部机构,改变重心位置来调节2,由于结构对称,该机器人具有自动复位的功能。 随后University of Bath的Rhodri等人利用相似的原理制作了相似的跳跃机器人 Jollbot1,但跳跃能力有限。随后该课题组又在此基础上进行了改进以提高跳跃性能 (Jollbot2),利用凸轮机构使内部机构沿着导杆运动实现弹性笼的变形,并且添加了主动滚 动功能,使其能够在地面上滚动。随后,该课题组又在Jollbot2的基础上将凸轮机构改成 柔性绳索驱动储能,大大增大了弹性笼的变形程度,并且添加了滚动方向调节装置。跳跃 高度与自身直径相当[535列 (B) 图1.l4A:Burdet制作的跳跃机器人SB-D:RhodriArmour制作的Jollbot.约
第1章绪论 图1.12 Bram制作的跳跃机器人㈣ 图1.13 Amir制作的跳跃机器人‘51】 Amir等人设计了具有能够行走、跳跃和翻筋斗的跳跃脚(jumpingjoe),该机器人由两 只脚组成,每只脚具有四个自由度,由四种不同的驱动器驱动各个自由度【511,但实现跳跃 功能仅仅利用了其中一个自由度。各个驱动器由FPGA为主控芯片的电路板驱动,并且实 现与主计算机的无线通信。该机器人跳跃高度为20 cm左右,相当于自身高度的40%。 3)具有复位功能的跳跃机器人 随着跳跃机器人的发展,具有自动复位功能的跳跃机器人开始问世。2001年Swiss Federal Institute ofTechnology的硕士研究生Burdet制作了一个球形跳跃机器人,利用曲柄 使内部机构从一端运动到另一端从而使外部的弹性笼变形以存储能量,跳跃方向可以通过 旋转内部机构,改变重心位置来调节【521,由于结构对称,该机器人具有自动复位的功能。 随后University of Bmh的Rhodfi等人利用相似的原理制作了相似的跳跃机器人 Jollbotl,但跳跃能力有限。随后该课题组又在此基础上进行了改进以提高跳跃性能 (Jollbot2),利用凸轮机构使内部机构沿着导杆运动实现弹性笼的变形,并且添加了主动滚 动功能,使其能够在地面上滚动。随后,该课题组又在Jollbot2的基础上将凸轮机构改成 柔性绳索驱动储能,大大增大了弹性笼的变形程度,并且添加了滚动方向调节装置。跳跃 高度与自身直径相当[53-55]。 图1.14A:Burdet制作的跳跃机器人㈣B.D:RhodriArmour制作的JollbotI.‘3-55j 习引引■捌列