目 2.5本章小结… .30 3仿蝗虫跳跃机构设计及其样机制作 31 31仿蝗虫跳跃机构的设计思路 .31 3.2跳跃足的设计与分析 .32 3.21跳跃足的设计.… 32 3.2.2跳跃足的理论分析. .33 3.3跳跃足的结构优化分析… .34 3.3.1跳跃足虚拟样机模型的建立.34 3.3.2跳跃足的仿真分析和优化设计35 3.4仿蝗虫跳跃机构的总体设计.36 3.4.1跳跃机构的设计和可行性分析. .36 3.42仿蝗虫跳跃机构样机的力学分析… .39 3.4.3跳跃机构样机的制作.… 40 3.5本章小结… .42 4仿生跳跃机构的动力学性能研究… 43 4.1动力学分析方法比较… ..43 4.2跳跃足对动力学性能的影响.… 43 4.2.1动力学模型的建立 43 4.2.2动力学方程的求解及对比分析… 47 4.3仿生跳跃机构起跳阶段实验研究 .49 4.3.1跳跃机构的高速摄像试验.… .49 4.3.2跳跃机构实验数据分析 50 4.4运动仿生相似性对比… .52 4.4.1关节运动特征的相似性… .52 4.4.2质心运动特征的相似性. .52 4.5本章小结… .53 5仿生跳跃机构的全周期跳跃实验分析及样机性能优化… .55 5.1跳跃机构跳跃全周期实验测试… .55 2
目录 2.5本章小结………………………………………………………………………………30 3仿蝗虫跳跃机构设计及其样机制作…………………………………………………………3 1 3.1仿蝗虫跳跃机构的设计思路…………………………………………………………31 3.2跳跃足的设计与分析…………………………………………………………………32 3.2.1跳跃足的设计………………………………………………………………….32 3.2.2跳跃足的理论分析…………………………………………………………….33 3.3跳跃足的结构优化分析………………………………………………………………34 3.3.1跳跃足虚拟样机模型的建立………………………………………………….34 3.3.2跳跃足的仿真分析和优化设计……………………………………………….35 3.4仿蝗虫跳跃机构的总体设计…………………………………………………………36 3.4.1跳跃机构的设计和可行性分析……………………………………………….36 3.4.2仿蝗虫跳跃机构样机的力学分析…………………………………………….39 3.4.3跳跃机构样机的制作………………………………………………………….40 3.5本章小结………………………………………………………………………………42 4仿生跳跃机构的动力学性能研究……………………………………………………………43 4.1动力学分析方法比较…………………………………………………………………43 4.2跳跃足对动力学性能的影响…………………………………………………………43 4.2.1动力学模型的建立…………………………………………………………….43 4.2.2动力学方程的求解及对比分析……………………………………………….47 4.3仿生跳跃机构起跳阶段实验研究……………………………………………………49 4.3.1跳跃机构的高速摄像试验…………………………………………………….49 4.3.2跳跃机构实验数据分析……………………………………………………….50 4.4运动仿生相似性对比…………………………………………………………………52 4.4.1关节运动特征的相似性……………………………………………………….52 4.4.2质心运动特征的相似性……………………………………………………….52 4.5本章小结………………………………………………………………………………53 5仿生跳跃机构的全周期跳跃实验分析及样机性能优化……………………………………55 5.1跳跃机构跳跃全周期实验测试………………………………………………………55
目录 5.2跳跃全周期实验结果分析.… 56 5.3跳跃机构的样机改进优化… 58 5.4优化前后跳跃性能对比. 61 5.5本章小结 63 6总结与展望 .64 6.1全文总结… 64 6.2工作展望 64 参考文献… 61 作者简历… 72 3
目录 5.2跳跃全周期实验结果分析……………………………………………………………56 5.3跳跃机构的样机改进优化……………………………………………………………58 5.4优化前后跳跃性能对比………………………………………………………………61 5.5本章小结………………………………………………………………………………63 6总结与展望……………………………………………………………………………………64 6.1全文总结………………………………………………………………………………64 6.2工作展望………………………………………………………………………………64 参考文献……………………….….……………………………………………………………67 作者简历………………………………………………………………………………………一72

第1章绪论 1绪论 1.1课题研究的背景与意义 随着人类考古探测、军事侦察、星际探索活动的增加,机器人的活动范围已从原来的 定点作业和结构化的工作环境中脱离出来,适应未知的、非结构化的环境已成为机器人未 来的发展趋势,这就要求机器人具有更好的自主运动能力及地面自适应能力、更快的躲避 风险的能力、更优的骨骼结构受力方式和更强的越障性能 目前的机器人主要为轮式、履带式、多足式机器人和扑翼飞行机器人等。其中轮式和 履带式移动机器人在非结构化的地面上越障能力有限,多足机器人随着机构自由度的增多 和电机数目的增加,机器人的失效率和控制系统的复杂程度也随之增加,扑翼飞行机器人 的越障能力较强,但其连续的能量消耗使其能量利用率下降并且易受风雨等自然条件的影 响。因此,需要研究更好的运动方式来提高机器人在非结构化的地面上的越障性能和能量 利用率。跳跃机器人具有较强的越障性能,可以越过相当于自身高度几倍的障碍物,尤其 是在月球等低重力的环境中工作,其优势更为明显四 近年来,仿生学与机器人技术的融合极大的促进了机器人的发展,从自然界中探索跳 跃生物的身体构造与跳跃机理,有助于仿生跳跃机构的设计开发。中科院院长路甬祥曾指 出:“经过35亿年进化的生物世界是基础创新不可替代、取之不竭的知识宝库和学习源泉 2”。由此可知,自然界中的跳跃生物能为跳跃机器人的研制提供新思路和新方法. 与袋鼠、青蛙等脊椎动物相比,昆虫的肌肉在运动过程中表现出超强的弹性能力,而 蝗虫跳跃足的伸肌和屈肌的组合系统能够实现踢腿和跳跃等不同的机械运动)。在蝗虫的 跳跃过程中,跳跃足胫节的快速伸展给蝗虫身体提供推力从而使其迅速离开地面,获得优 良的起跳速度。因此,对蝗虫跳跃运动进行研究,探索其跳跃过程中的运动机理对跳跃机 构的设计具有一定的积极作用. 本论文得到国家自然科学基金项目(项目编号:50975251)的资助,开展了蝗虫跳跃 机理及其仿生跳跃机构的研究。本文采用高速摄像技术对蝗虫起跳阶段进行图像采集与数 据处理,得到该阶段蝗虫跳跃足各关节转角的变化曲线。为研究蝗虫起跳阶段的运动学特 性,建立了蝗虫平面连杆机构模型,通过运动学分析得到了蝗虫质心与跳跃足关节转角间 的关系,并得出了蝗虫起跳阶段质心运动学曲线,并对其运动学曲线具有的积极意义进行
第1章绪论 1绪论 1.1课题研究的背景与意义 随着人类考古探测、军事侦察、星际探索活动的增加,机器人的活动范围已从原来的 定点作业和结构化的工作环境中脱离出来,适应未知的、非结构化的环境已成为机器人未 来的发展趋势,这就要求机器人具有更好的自主运动能力及地面自适应能力、更快的躲避 风险的能力、更优的骨骼结构受力方式和更强的越障性能。 目前的机器人主要为轮式、履带式、多足式机器人和扑翼飞行机器人等。其中轮式和 履带式移动机器人在非结构化的地面上越障能力有限,多足机器人随着机构自由度的增多 和电机数目的增加,机器人的失效率和控制系统的复杂程度也随之增加,扑翼飞行机器人 的越障能力较强,但其连续的能量消耗使其能量利用率下降并且易受风雨等自然条件的影 响。因此,需要研究更好的运动方式来提高机器人在非结构化的地面上的越障性能和能量 利用率。跳跃机器人具有较强的越障性能,可以越过相当于自身高度几倍的障碍物,尤其 是在月球等低重力的环境中工作,其优势更为明显【1]。 近年来,仿生学与机器人技术的融合极大的促进了机器人的发展,从自然界中探索跳 跃生物的身体构造与跳跃机理,有助于仿生跳跃机构的设计开发。中科院院长路甬祥曾指 出:“经过35亿年进化的生物世界是基础创新不可替代、取之不竭的知识宝库和学习源泉 【2】”。由此可知,自然界中的跳跃生物能为跳跃机器人的研制提供新思路和新方法。 与袋鼠、青蛙等脊椎动物相比,昆虫的肌肉在运动过程中表现出超强的弹性能力,而 蝗虫跳跃足的伸肌和屈肌的组合系统能够实现踢腿和跳跃等不同的机械运动【31。在蝗虫的 跳跃过程中,跳跃足胫节的快速伸展给蝗虫身体提供推力从而使其迅速离开地面,获得优 良的起跳速度。因此,对蝗虫跳跃运动进行研究,探索其跳跃过程中的运动机理对跳跃机 构的设计具有一定的积极作用。 本论文得到国家自然科学基金项目(项目编号:50975251)的资助,开展了蝗虫跳跃 机理及其仿生跳跃机构的研究。本文采用高速摄像技术对蝗虫起跳阶段进行图像采集与数 据处理,得到该阶段蝗虫跳跃足各关节转角的变化曲线。为研究蝗虫起跳阶段的运动学特 性,建立了蝗虫平面连杆机构模型,通过运动学分析得到了蝗虫质心与跳跃足关节转角间 的关系,并得出了蝗虫起跳阶段质心运动学曲线,并对其运动学曲线具有的积极意义进行
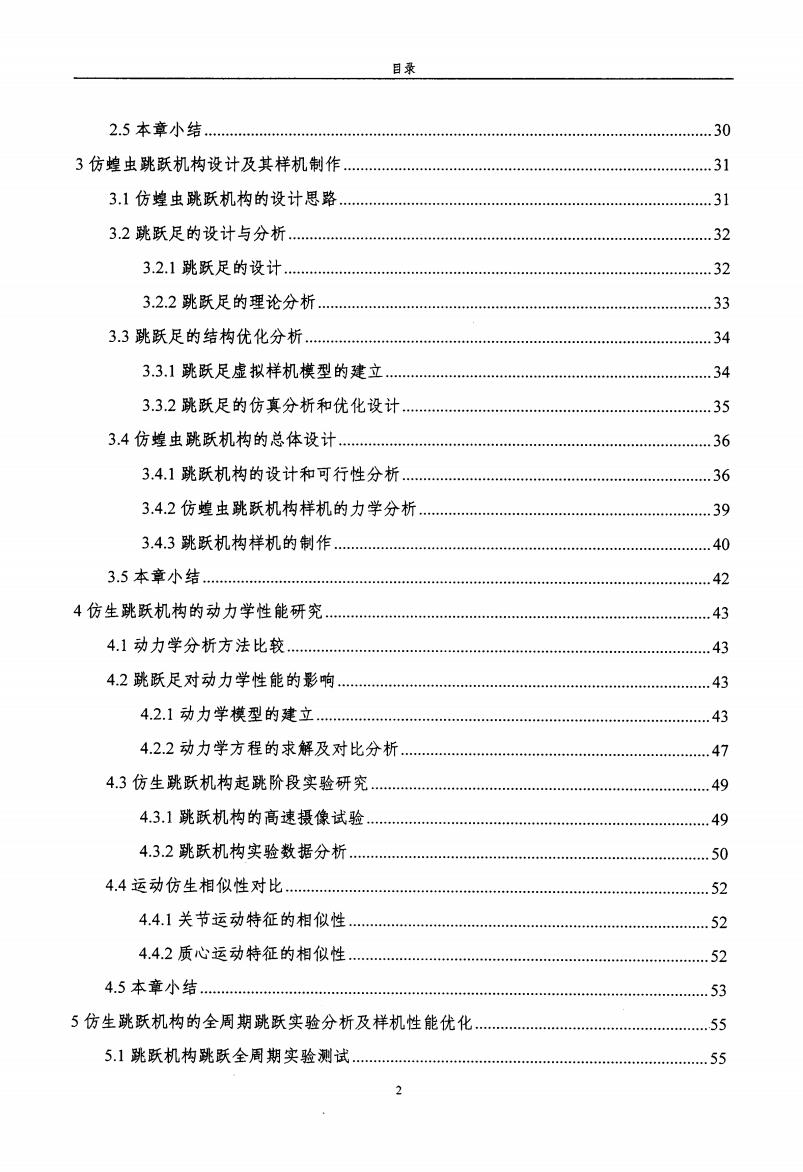
第1章绪论 了合理的解释,从而揭示了蝗虫运动机理。在此基础上提出了仿生跳跃机构的设计思路, 并设计加工制作了跳跃样机,并对其进行动力学分析和起跳阶段实验测试,结果表明该机 构在起跳阶段与蝗虫具有一定的运动仿生相似性。研究思路与成果对于仿生机器人的设计 以及跳跃机器人的深入研究具有一定的指导意义, 12跳跃生物及其跳跃机理研究进展 1.2.1国外跳跃生物及其跳跃机理研究现状 在千百万年的自然选择过程中,自然界中的生物为适应环境的变化,进化出多种多样 精巧的运动方式以捕食猎物和躲避天敌的袭击,与其他运动相比,跳跃运动具有更强的躲 避风险的能力和快速移动性能。在自然界中,具有跳跃能力的生物分布广泛,其跳跃运动 也受到了国内外科研人员的广泛关注。 其中,哺乳动物在运动过程中主要依靠腿部的肌腱、韧带进行能量的存储和释放,典 型代表有袋鼠和跳鼠等。袋鼠跳跃运动过程中通过肌肉和肌腱的作用驱动腿部骨骼协调运 动实现跳跃,在该过程中利用尾巴调节重心位置以实现身体的平衡,且袋鼠具有柔性脚, 在落地时具有缓冲吸震的功能9。跳鼠运动能力较强,具有一定的跳跃性能,在Hty教 授的研究中,一只质量为24.5g的跳鼠能够在57ms的加速过程中获得3.2m/s的跳跃速 度,其跳跃高度约为42cm) t=0ms t=24ms t=56ms 图1.】跳跃鼠和青蛙的跳跃过程5 两栖动物中,具有跳跃运动的生物为青蛙和跳跳鱼等。其中青蛙后腿细长,在跳跃过 程中利用强有力的后腿伸展以获得较大的起跳速度,),研究表明,青蛙在140s的时间 内能够获得最大的起跳速度约为2.04m/s,跳跃的距离约为自身长度的15倍左右
第1章绪论 了合理的解释,从而揭示了蝗虫运动机理。在此基础上提出了仿生跳跃机构的设计思路, 并设计加工制作了跳跃样机,并对其进行动力学分析和起跳阶段实验测试,结果表明该机 构在起跳阶段与蝗虫具有一定的运动仿生相似性。研究思路与成果对于仿生机器人的设计 以及跳跃机器人的深入研究具有一定的指导意义。 1.2跳跃生物及其跳跃机理研究进展 1.2.1国外跳跃生物及其跳跃机理研究现状 在千百万年的自然选择过程中,自然界中的生物为适应环境的变化,进化出多种多样 精巧的运动方式以捕食猎物和躲避天敌的袭击。与其他运动相比,跳跃运动具有更强的躲 避风险的能力和快速移动性能。在自然界中,具有跳跃能力的生物分布广泛,其跳跃运动 也受到了国内外科研人员的广泛关注。 其中,哺乳动物在运动过程中主要依靠腿部的肌腱、韧带进行能量的存储和释放,典 型代表有袋鼠和跳鼠等。袋鼠跳跃运动过程中通过肌肉和肌腱的作用驱动腿部骨骼协调运 动实现跳跃,在该过程中利用尾巴调节重心位置以实现身体的平衡,且袋鼠具有柔性脚, 在落地时具有缓冲吸震的功能【4】。跳鼠运动能力较强,具有一定的跳跃性能,在Harty教 授的研究中,一只质量为24.5 g的跳鼠能够在57 ms的加速过程中获得3.2 m/s的跳跃速 度,其跳跃高度约为42 cm【5】。 ,罴。0,m。鬈。紫茹毒—咿 。 … -;。j i。妻曩i。,鬻i 图1.1跳跃鼠和青蛙的跳跃过程【5,61 两栖动物中,具有跳跃运动的生物为青蛙和跳跳鱼等。其中青蛙后腿细长,在跳跃过 程中利用强有力的后腿伸展以获得较大的起跳速度【7,81。研究表明,青蛙在140 ms的时间 内能够获得最大的起跳速度约为2.04 m/s,跳跃的距离约为自身长度的15倍左右【61。 ,二
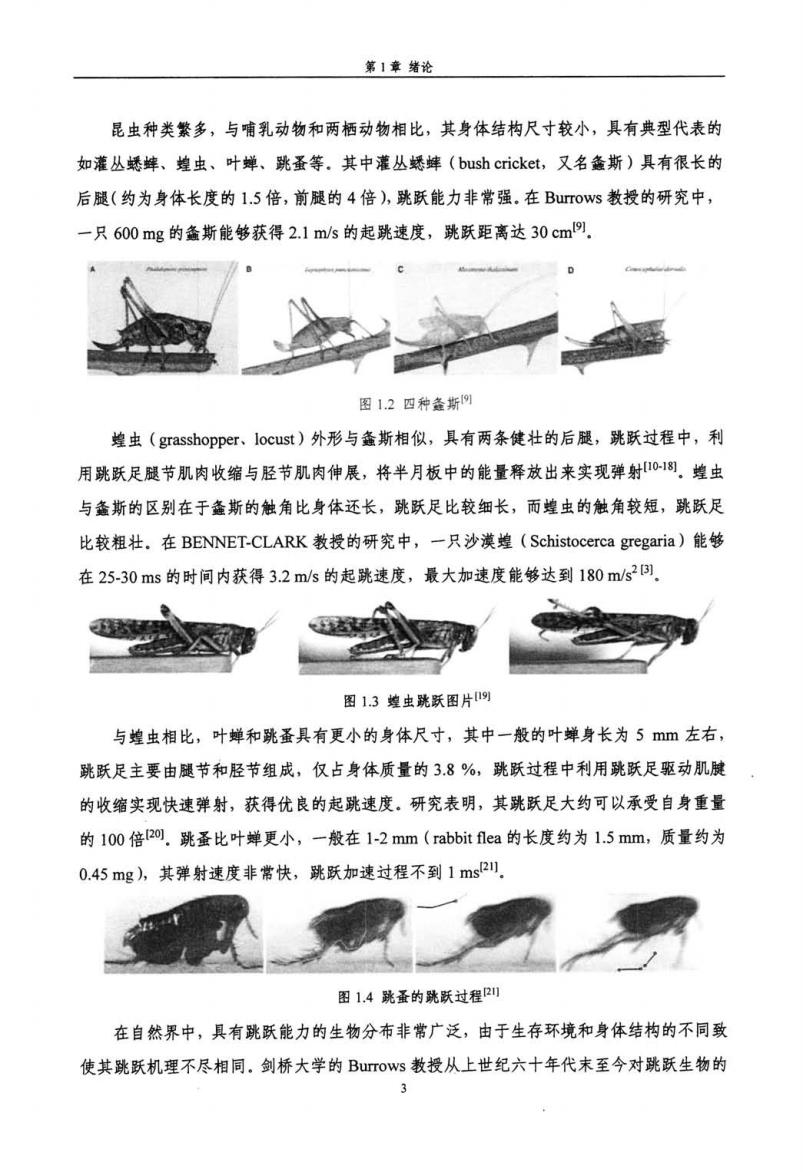
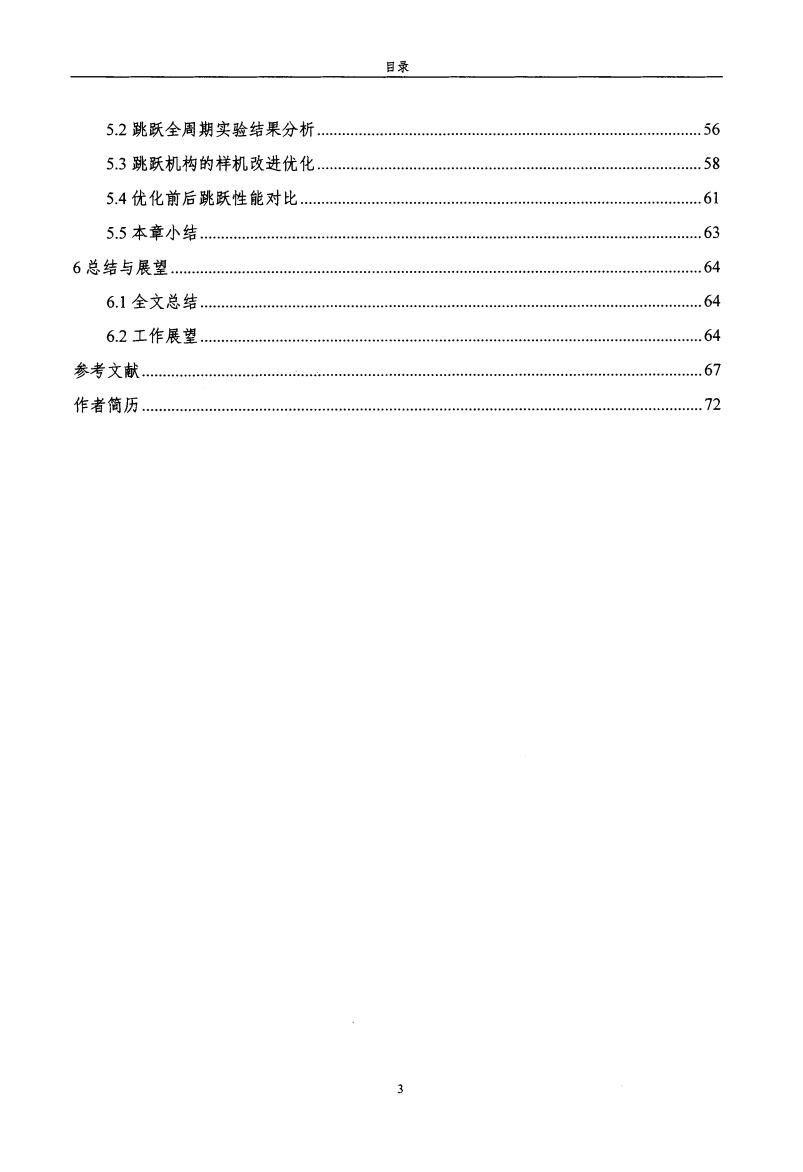
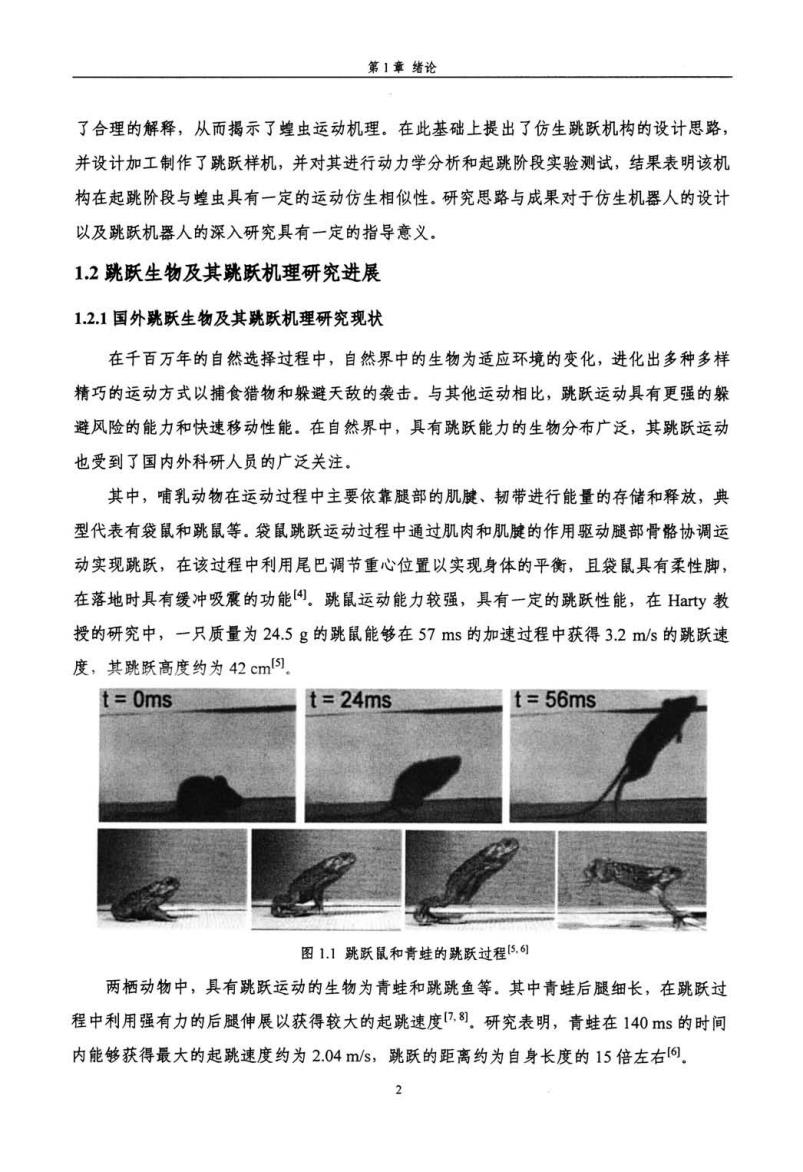
第1章绪论 昆虫种类繁多,与哺乳动物和两栖动物相比,其身体结构尺寸较小,具有典型代表的 如灌丛蟋蟀、蝗虫、叶蝉、跳蚤等,其中灌丛蟋蟀(bush cricket,.又名螽斯)具有很长的 后腿(约为身体长度的1.5倍,前腿的4倍),跳跃能力非常强。在Burrows教授的研究中, 一只600mg的螽斯能够获得2.1m/s的起跳速度,跳跃距离达30cm9. 图1.2四种螽斯例 蝗虫(grasshopper、locust)外形与螽斯相似,具有两条健壮的后腿,跳跃过程中,利 用跳跃足腿节肌肉收缩与胫节肌肉伸展,将半月板中的能量释放出来实现弹射01).蝗虫 与螽斯的区别在于螽斯的触角比身体还长,跳跃足比较细长,而蝗虫的触角较短,跳跃足 比较粗壮.在BENNET--CLARK教授的研究中,一只沙漠蝗(Schistocerca gregaria)能够 在25-30ms的时间内获得3.2m/s的起跳速度,最大加速度能够达到180m/s2) 图1.3蝗虫跳跃图片例 与蝗虫相比,叶蝉和跳蚤具有更小的身体尺寸,其中一般的叶蝉身长为5mm左右, 跳跃足主要由腿节和胫节组成,仅占身体质量的3.8%,跳跃过程中利用跳跃足驱动肌腱 的收缩实现快速弹射,获得优良的起跳速度。研究表明,其跳跃足大约可以承受自身重量 的100倍2o.跳蚤比叶蝉更小,一般在1-2mm(rabbit flea的长度约为l.5mm,质量约为 0.45mg),其弹射速度非常快,跳跃加速过程不到1ms21 图1.4跳蚤的跳跃过程叫 在自然界中,具有跳跃能力的生物分布非常广泛,由于生存环境和身体结构的不同致 使其跳跃机理不尽相同。.剑桥大学的Burrows教授从上世纪六十年代末至今对跳跃生物的 3
第1章绪论 昆虫种类繁多,与哺乳动物和两栖动物相比,其身体结构尺寸较小,具有典型代表的 如灌丛蟋蟀、蝗虫、叶蝉、跳蚤等。其中灌丛蟋蟀(bush cricket,又名螽斯)具有很长的 后腿(约为身体长度的1.5倍,前腿的4倍),跳跃能力非常强。在Burrows教授的研究中, 一只600 mg的螽斯能够获得2.1 m/s的起跳速度,跳跃距离达30 cm[91。 叠基+一一一≯ 图1.2四种螽斯一1 蝗虫(grasshopper、locust)外形与螽斯相似,具有两条健壮的后腿,跳跃过程中,利 用跳跃足腿节肌肉收缩与胫节肌肉伸展,将半月板中的能量释放出来实现弹射[10q8】。蝗虫 与螽斯的区别在于螽斯的触角比身体还长,跳跃足比较细长,而蝗虫的触角较短,跳跃足 比较粗壮。在BENNET-CLARK教授的研究中,一只沙漠蝗(Schistocerca gregaria)能够 在25.30 ms的时间内获得3.2 m/s的起跳速度,最大加速度能够达到180 m/s2[31。 图1.3蝗虫跳跃图片【心1 与蝗虫相比,叶蝉和跳蚤具有更小的身体尺寸,其中一般的叶蝉身长为5 I/llTI左右, 跳跃足主要由腿节和胫节组成,仅占身体质量的3.8%,跳跃过程中利用跳跃足驱动肌腱 的收缩实现快速弹射,获得优良的起跳速度。研究表明,其跳跃足大约可以承受自身重量 的100倍【201。跳蚤比叶蝉更小,一般在1-2 rnrn(rabbit flea的长度约为1.5 mill,质量约为 0.45 mg),其弹射速度非常快,跳跃加速过程不到1 ms[21】。 黛匣J曩)曩;, 图1.4跳蚤的跳跃过程㈨ 在自然界中,具有跳跃能力的生物分布非常广泛,由于生存环境和身体结构的不同致 使其跳跃机理不尽相同。剑桥大学的Burrows教授从上世纪六十年代末至今对跳跃生物的 3