第1章绪论 目前可用于智能材料与结构系统中的驱动器材料主要有形状记忆合金 (Shape Memory Alloy)、压电陶瓷、电(磁)致仲缩材料、电(磁)流变体等。其中SMA 出于驱动作用显著、性能较稳定等特点,成为智能材料与结构中研究最多的驱动 元件之一。目前有关智能材料与结构技术的研究工作正在世界范围内迅速展开, 尤其在美、日及欧洲发达国家更是给予了高度重视。 1.2本文的研究意义及主要的研究工作 在过去的一个多世纪里,海洋世界里发生最大的变化莫过于水下推进器的诞 生和发展,导致整个海洋中处于20Hz一300Hz范围内的背景噪声大部分是人类 4 推进器产生的。传统推进器消耗高,污染大,严重破坏了水中生物的生存环境。 当前,已经有越来越多的研究人员开始注重对环境的保护,对水下推进器的研究 已逐渐从传统的电机驱动向智能材料驱动转变。 我们放限海洋,鱼类在水中游动时,能本能的利用流体力学原理,减小流体 阻力和提高推力。十几亿年的进化造就了完美的运动方式,其超凡的水中运动能 力为各式现代化的水面舰船和水下航行器所望尘莫及。大约有85%的鱼类利用身 体的摆动(或波动)来产生巡游的推进力(BC℉模式)、利用鱼鳍的波动(或摆动)来 产生转弯等机动游的驱动力(MP℉模式)。鱼类在水中表现出惊人的机动性 和巡游速度,使得人们更加倾向于研究鱼游机理,根据鱼类形态、生理结构以及 游动的动力学和运动学方程来设计仿鱼形水下推进器。用来帮助人们更好地了解 水下未知世界,丌发水下环境资源,进行石油勘测或军事侦察等。出于MP℉模 式运动的复杂性,要较好的模拟其游动姿念用电机作为驱动源是比较困难的。形 状记忆合金以其优越的综合性能成为研究的首选材料。 随着仿生学和机器人学的不断进步,研究仿鱼水下推进技术己成为热点之 一,它为研制高效、高机动性、低噪声和易隐蔽的水下航行器提供了一种新的思 路。本文介绍一种使用形状记忆合金薄板作为鳍条的柔性仿生鱼鳍,利用SMA的 形状记忆效应可以实现结构的变形控制。 本文对基于形状记忆合金材料驱动的柔性仿尘波动鱼鳍研究进行探讨,试图 在驱动机理和方式上提高仿生程度。主要内容包括:在对目前常见的智能材料性 能比较的前提下,设计了形状记忆合金柔性仿生波动鱼鳍,指出若干关键设计要 点、难点以及相应的处理方法;通过对仿生鱼鳍的运动学和动力学的数学建模和 分析,得出形状记忆合金鳍条驱动部位变形曲率与端部位移量关系、变形曲率与 反馈(应变片输出电匹)信号大小关系和每根鳍条所需提供的最大输出力计算。最 后通过实验给出了形状记忆合金鳍条的最大输出力与鳍条厚度的关系,形状记忆 2
第1苹绪论 目自仃可用于智能材料与结构系统中的驱动器材料主要有形状记忆合金 (Shape MemoryAlloy)、压电陶瓷、电(磁)致伸缩材料、电(磁)流变体等。其中SMA 由于驱动作用显著、性能较稳定等特点,成为智能材料与结构中研究最多的驱动 元件之一。目前有关智能材料与结构技术的研究工作正在世界范围内迅速展开, 尤其在美、同及欧洲发达国家更是给予了高度重视。 1.2本文的研究意义及主要的研究工作 在过去的一个多世纪罩,海洋世界里发生最大的变化莫过于水下推进器的诞 生和发展,导致整个海洋中处于20Hz--300Hz范围内的背景噪声大部分是人类 推进器产生的~。传统推进器消耗高,污染大,严重破坏了水中生物的生存环境。 当前,已经有越来越多的研究人员开始注重对环境的保护,对水下推进器的研究 已逐渐从传统的电机驱动向智能材料驱动转变。 我们放眼海洋,鱼类在水中游动时,能本能的利用流体力学原理,减小流体 阻力和提高推力。十几亿年的进化造就了完美的运动方式,其超凡的水中运动能 力为各式现代化的水面舰船和水下航行器所望尘莫及。大约有85%的鱼类利用身 体的摆动(或波动)来产生巡游的推进力(BCF模式)、利用鱼鳍的波动(或摆动)来 产生转弯等机动游的驱动力(MPF模式)…’。鱼类在水中表现出惊人的机动性 和巡游速度,使得人们更加倾向于研究鱼游机理,根据鱼类形态、生理结构以及 游动的动力学和运动学方程来设计仿鱼形水下推进器。用柬帮助人们更好地了解 水下未知世界,丌发水下环境资源,进行石油勘测或军事侦察等。由于MPF模 式运动的复杂性,要较好的模拟其游动姿态用电机作为驱动源是比较困难的。形 状记忆合金以其优越的综合性能成为研究的首选材料~。 随着仿生学和机器人学的不断进步,研究仿鱼水下推进技术己成为热点之 一,它为研制高效、高机动性、低噪声和易隐蔽的水下航行器提供了一种新的思 路。本文介绍一种使用形状记忆合金薄板作为鳍条的柔性仿生鱼鳍,利用SMA的 形状记忆效应可以实现结构的变形控制。 本文对基于形状记忆合金材料驱动的柔性仿生波动鱼鳍研究进行探讨,试图 在驱动机理和方式上提高仿生程度。主要内容包括:在对目前常见的智能材料性 能比较的前提下,设计了形状记忆合金柔性仿生波动鱼鳍,指出若干关键设计要 点、难点以及相应的处理方法;通过对仿生鱼鳍的运动学和动力学的数学建模和 分析,得出形状记忆合金鳍条驱动部位变形曲率与端部位移量关系、变形曲率与 反馈(应变片输出电压)信号大小关系和每根鳍条所需提供的最大输出力计算。最 后通过实验给出了形状记忆合金鳍条的最大输出力与鳍条厚度的关系、形状记忆 2

第1章绪论 合金鳍条平均最大偏转角度与鳍条厚度的关系以及加热电流占空比与鳍条最大 偏转角度关系,并根据所建立的数学模型,确定形状记忆合金鳍条厚度的优化取 值范围。 3
第l章绪论 合会鳍条平均最大偏转角度与鳍条厚度的关系以及加热电流占空比与鳍条最大 偏转角度关系,并根据所建立的数学模型,确定形状记忆合金鳍条厚度的优化取 值范围
第2章功能材料简介及其选抒 第2章功能材料简介及其选择 目前应用的驱动器材料主要有磁致仲缩材料(Magnetostrictive Material)、压电 陶瓷(Piezoelectric Material)、形状记忆材料(Shape Memory Material,SMM、电致 伸缩材料(Electrostrictive Material)、电磁流变材料(Electrorheological/Magnetorh- eological Fluid,.ERF/MRF)、高分子聚合物等。下文为功能材料性能简介。 2.1功能材料简介 ●磁致伸缩材料 铁磁体在外磁场中磁化时长度及体积均发生变化,这个现象称为磁致伸缩或 磁致伸缩效应。山焦尔(J.P.Joule)于1842年发现的,也称焦耳效应。磁致伸缩 现象的简单解释是:磁性体在居里温度T心以下具有磁畴结构,每个磁畴在磁场 作用下产生自发磁化,从而存在着自发形变。在磁场作用下,磁畴发生旋转,它 们方向趋于一致,磁畴的形变也趋向于一致,宏观上出现磁致伸缩应变。利用其 焦耳效应(磁性体被外加磁场磁化时,其长度发生变化),可制作磁致伸缩驱动器。 910 目前磁致伸缩智能材料的主流是稀士磁致伸缩材料,稀土超磁致伸缩材 料是近期才发展起来的一种新型功能材料。这种材料在电磁场的作用下可以产生 微变形或声能,也可以将微变形或声能转化为电磁能。在国防、航空航天和高技 术领域应用极为广泛,如线性马达、噪声与振动控制系统、超声技术等。它具有 磁致伸缩值大,机械响应速度快和功率密度高特点。但也存在伸缩变形很小(应 变量:10~10、需要施加外磁场、驱动需要的能量比压电材料要大、存在磁 滞等不足。 ●压电陶瓷 某些材料在机械应力作用下产生变形,引起内部正负电荷中心相对位移发生 极化,导致材料两端表面出现符号相反的束缚电荷的现象,称为压电效应。 具有这种性能的陶瓷成为压电陶瓷,它的表面电荷的密度与所受的机械应力成正 比。反之,当施加外电场,会使材料产尘机械变形,而且其应变与电场强度成正 比,则称为逆压电效应。若施加的是交变电场,该材料将随着交变电场的频率作 伸缩振动。施加的电场强度越强,振动的幅度越大
第2章功能材料简介及其选择 第2章 功能材料简介及其选择 目6,J.应用的驱动器材料主要有磁致伸缩材料(Magnetostrictive Material)、压电 陶瓷(Piezoelectric Material)、形状记忆材料(Shape Memor),Material,SMM)、电致 伸缩材料(Electrostrictive Material)、电磁流变材料(E1ectrorheoJogical/Magnetorh. e。logical FIuid,ERF/MRF)、高分子聚合物等。下文为功能材料性能简介【8J。 2.1功能材料简介 ·磁致伸缩材料 铁磁体在外磁场中磁化时长度及体积均发生变化,这个现象称为磁致伸缩或 磁致伸缩效应。由焦尔(J.R Joule)于1842年发现的,也称焦耳效应。磁致伸缩 现象的简单解释是:磁性体在居罩温度Tc以下具有磁畴结构,每个磁畴在磁场 作用下产生自发磁化,从而存在着自发形变。在磁场作用下,磁畴发生旋转,它 们方向趋于一致,磁畴的形变也趋向于一致,宏观上出现磁致伸缩应变。利用其 焦耳效应(磁性体被外加磁场磁化时,其长度发生变化),可制作磁致伸缩驱动器。 目j仃磁致伸缩智能材料的主流是稀土磁致伸缩材料…。,稀土超磁致伸缩材 料是近期爿‘发展起来的一种新型功能材料。这种材料在电磁场的作用下可以产生 微变形或声能,也可以将微变形或声能转化为电磁能。在国防、航空航天和高技 术领域应用极为广泛,如线性马达、噪声与振动控制系统、超声技术等。它具有 磁致伸缩值大,机械响应速度快和功率密度高特点。但也存在伸缩变形很小(应 变量:10一~10。)、需要施加外磁场、驱动需要的能量比压电材料要大、存在磁 滞等不足。 ·压电陶瓷 某些材料在机械应力作用下产生变形,引起内部正负电荷中心相对位移发生 极化,导致材料两端表面出现符号相反的束缚电荷的现象,称为压电效应~。 具有这种性能的陶瓷成为压电陶瓷,它的表面电荷的密度与所受的机械应力成正 比。反之,当施加外电场,会使材料产生机械变形,而且其应变与电场强度成『F 比,则称为逆压电效应。若施加的是交变电场,该材料将随着交变电场的频率作 伸缩振动。施加的电场强度越强,振动的幅度越大。 4
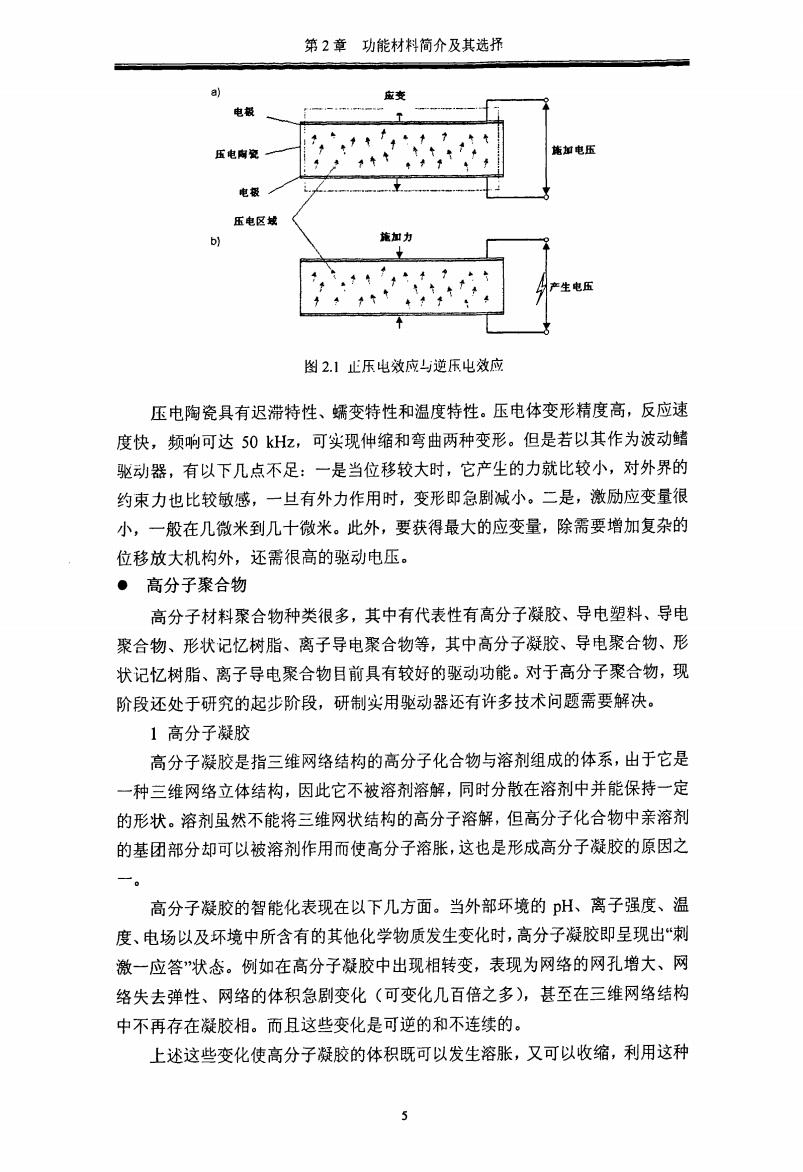
第2章功能材料简介及其选抒 应变 电极 压电陶变 加电压 电极 压电区城 旄加力 图21止乐电效应与逆压电效应 压电陶瓷具有迟滞特性、蠕变特性和温度特性。压电体变形精度高,反应速 度快,频响可达50kHz,可实现仲缩和弯曲两种变形。但是若以其作为波动鳍 驱动器,有以下几点不足:一是当位移较大时,它产生的力就比较小,对外界的 约束力也比较敏感,一旦有外力作用时,变形即急剧减小。二是,激励应变量很 小,一般在几微米到几十微米。此外,要获得最大的应变量,除需要增加复杂的 位移放大机构外,还需很高的驱动电压。 ·高分子聚合物 高分子材料聚合物种类很多,其中有代表性有高分子凝胶、导电塑料、导电 聚合物、形状记忆树脂、离子导电聚合物等,其中高分子凝胶、导电聚合物、形 状记忆树脂、离子导电聚合物目前具有较好的驱动功能。对于高分子聚合物,现 阶段还处于研究的起步阶段,研制实用驱动器还有许多技术问题需要解决。 1高分子凝胶 高分子凝胶是指三维网络结构的高分子化合物与溶剂组成的体系,出于它是 一种三维网络立体结构,因此它不被溶剂溶解,同时分散在溶剂中并能保持一定 的形状。溶剂虽然不能将三维网状结构的高分子溶解,但高分子化合物中亲溶剂 的基团部分却可以被溶剂作用而使高分子溶胀,这也是形成高分子凝胶的原因之 一。 高分子凝胶的智能化表现在以下几方面。当外部环境的pH、离子强度、温 度、电场以及环境中所含有的其他化学物质发生变化时,高分子凝胶即呈现出“刺 激一应答”状态。例如在高分子凝胶中出现相转变,表现为网络的网孔增大、网 络失去弹性、网络的体积急剧变化(可变化几百倍之多),甚至在三维网络结构 中不再存在凝胶相。而且这些变化是可逆的和不连续的。 上述这些变化使高分子凝胶的体积既可以发生溶胀,又可以收缩,利用这种 5
第2章功能材料简介及其选择 电极 电极 压电区 图2.I止压电效应与逆压电效应 压电陶瓷具有迟滞特性、蠕变特性和温度特性。压电体变形精度高,反应速 度快,频响可达50 kHz,可实现伸缩和弯曲两种变形。但是若以其作为波动鳍 驱动器,有以下几点不足:一是当位移较大时,它产生的力就比较小,对外界的 约束力也比较敏感,一旦有外力作用时,变形即急剧减小。二是,激励应变量很 小,一般在几微米到几十微米。此外,要获得最大的应变量,除需要增加复杂的 位移放大机构外,还需很高的驱动电压。 ·高分子聚合物 高分子材料聚合物种类很多,其中有代表性有高分子凝胶、导电塑料、导电 聚合物、形状记忆树脂、离子导电聚合物等,其中高分子凝胶、导电聚合物、形 状记忆树脂、离子导电聚合物目前具有较好的驱动功能。对于高分子聚合物,现 阶段还处于研究的起步阶段,研制实用驱动器还有许多技术问题需要解决。 1高分子凝胶 高分子凝胶是指三维网络结构的高分子化合物与溶剂组成的体系,由于它是 一种三维网络立体结构,因此它不被溶剂溶解,同时分散在溶剂中并能保持一定 的形状。溶剂虽然不能将三维网状结构的高分子溶解,但高分子化合物中亲溶剂 的基团部分却可以被溶剂作用而使高分子溶胀,这也是形成高分子凝胶的原因之 一O 高分子凝胶的智能化表现在以下几方面。当外部环境的pH、离子强度、温 度、电场以及环境中所含有的其他化学物质发生变化时,高分子凝胶即呈现出“刺 激一应答”状态。例如在高分子凝胶中出现相转变,表现为网络的网孔增大、网 络失去弹性、网络的体积急剧变化(可变化几百倍之多),甚至在三维网络结构 中不再存在凝胶相。而且这些变化是可逆的和不连续的。 上述这些变化使高分子凝胶的体积既可以发生溶胀,又可以收缩,利用这种

第2章功能材料简介及其选择 性质设计出一种装置,它具有肌肉的功能,这种人造肌肉制成的机械手类似 于智能机器人的手,能够拿东西。利用高分子凝胶受外界环境刺激而变形的特性, 主要应用在药物释放系统、化学机械、人工触觉系统、光阀、人工肌肉和执行元 件等。应用在波动鳍驰动上,目前存在的主要问题是需要有特定要求的液体环境, 动作方向不易控制等。 2形状记忆树脂 形状记忆树脂在两端加上电极通电后,会出现收缩现象,利用此特性,可以 作驱动元件。形状记忆树脂出两种物态组成:保持成品形状的固定相,可用来记 忆最初成型时的形状:随温度变化而发生软化硬化的可逆变化的可逆相,它能 够保证成品可以改变形状。出于固定相和可逆相都有自己的软化温度,因此调节 和改变温度可使形状记忆树脂在固定相或可逆相之间转变。形状记忆树脂种类 多,以山聚苯乙烯和结晶性聚丁二烯组成的丁苯共聚物为例。将树脂加热到120 度以上时,把其压制成所需的形状,变形和形状恢复温度为60度。该树脂的变 形量大,可高达400%,常念下当300%变形时拉仲应力7.85MPa,拉伸强度9.81 MPa,断裂强度5.89Mpa,回弹率40%。目前驱动力较小,还不能满足波动鳍 驱动要求。 3导电聚合物 一般情况下物体分为四种形态:绝缘体、半导体、导体和超导体,而导电 聚合物实现了从绝缘体到半导体、再到导体的变化,是所有物质中能够完成这种 形念变化跨度最大的,山于这些特性使导电聚合物具有了许多优异的应用性能。 导电聚合物不能称作“导电塑料”,因为导电塑料是在塑料里掺半导体材料,其 过程是一个简单的复合过程。而导电聚合物的形成是一个分子合成的过程,是本 征导电。 聚合物 外加电 图2.2导电聚合物的驱动原理 聚苯胺(PA)及其衍生物是迄今人们研究最多的导电聚合物之一。其导电率 导达1.5X102s/cm,其掺杂念导电率达4.6×10s/cm。导电聚合物的工作电压为
第2章功能材料简介及其选择 f121 性质设计出一种装置,它具有肌肉的功能~,这种人造肌肉制成的机械手类似 于智能机器人的手,能够拿东西。利用高分子凝胶受外界环境刺激而变形的特性, 主要应用在药物释放系统、化学机械、人工触觉系统、光阀、人工肌肉和执行元 件等。应用在波动鳍驱动上,目前存在的主要问题是需要有特定要求的液体环境, 动作方向不易控制等。 2形状记忆树脂 形状记忆树脂在两端加上电极通电后,会出现收缩现象,利用此特性,可以 作驱动元件。形状记忆树脂由两种物态组成:保持成品形状的固定相,可用来记 忆最初成型时的形状;随温度变化而发生软化.硬化的可逆变化的可逆相,它能 够保证成品可以改变形状。由于固定相和可逆相都有自己的软化温度,因此调节 和改变温度可使形状记忆树脂在固定相或可逆相之间转变。形状记忆树脂种类 多,以由聚苯乙烯和结晶性聚丁二烯组成的丁苯共聚物为例。将树脂加热到120 度以上时,把其压制成所需的形状,变形和形状恢复温度为60度。该树脂的变 形量大,可高达400%,常态下当300%变形时拉伸应力7.85 MPa,拉伸强度9.81 MPa,断裂强度5.89 Mpa,回弹率40%。且日lf驱动力较小,还不能满足波动鳍 驱动要求。 3导电聚合物 一般情况下物体分为四种形态:绝缘体、半导体、导体和超导体,而导电 聚合物实现了从绝缘体到半导体、再到导体的变化,是所有物质中能够完成这种 形态变化跨度最大的,由于这些特性使导电聚合物具有了许多优异的应用性能。 导电聚合物不能称作“导电塑料”,因为导电塑料是在塑料里掺半导体材料,其 过程是一个简单的复合过程。而导电聚合物的形成是一个分子合成的过程,是本 征导电。 加电 图2.2导电聚合物的驱动原理 聚苯胺(PAn)及其衍生物是迄今人们研究最多的导电聚合物之一。其导电率 导达1.5×10。s/cm,其掺杂态导电率达4。6x 10一s/cm。导电聚合物的工作电压为 6