第10卷第5期 智能系统学。报 Vol.10 No.5 2015年10月 CAAI Transactions on Intelligent Systems 0ct.2015 D0I:10.11992/is.201406045 网s络出版t地址:htp://ww.cnki.net/kcms/detail/23.1538.tp.201509030.1456.002.html 粗糙集的过炮和多交叉口 协同优化模型研究 陈坚,2,陈健3,邵毅明2,邓天民2 (1.重庆交通大学山地城市交道系统与安全重庆市重点实验室,重庆400074:2.重庆交通大学交通运输学院,重庆 400074:3.中国中铁二院工程集团有限责任公司,四川成都610031) 摘要:为解决现有模糊智能控制方法仅适用于单交叉口非饱和状态,满足区域交通过饱和多交叉口信号协同联动 控制的需要,提出了高峰时期主通道优化控制策略。在粗糙集知识推理基础上,构建了以多交叉口状态信息为条件 属性,以绿灯延长方式、绿灯延长相位和绿灯延长时间3个参数为决策属性的多决策属性模糊控制模型。运用可辨 识矩阵与属性频度的属性约简方法对模型进行约简,提取决策规则。实例分析表明:多交叉口主通道绿灯时间延长 3~8s能够有效提高区域交通整体通行效能,同时延长时间不仅与过饱和状态车辆最大排队长度有关,还与绿灯延 长方式、绿灯延长相位存在关联,这与交警经验总结的控制规律一致。 关键词:交通工程:交通控制;多交叉口:过饱和:粗糙集;决策规则 中图分类号:U491.54文献标志码:A文章编号:1673-4785(2015)05-0783-07 中文引用格式:陈坚,陈健,邵毅明,等.粗糙集的过饱和多交叉口协同优化模型[J].智能系统学报,2015,10(5):783-789. 英文引用格式:CHEN Jian,CHEN Jian,SHAO Yiming,etal.Collaborative optimization model for oversaturated multiple inter- sections based on the rough set theory[J].CAAI Transactions on Intelligent Systems,2015,10(5):783-789. Collaborative optimization model for oversaturated multiple intersections based on the rough set theory CHEN Jian'2,CHEN Jian,SHAO Yiming'2,DENG Tianmin'2 (1.Chongqing Key Lab of Traffic System Safety in Mountain Cities,Chongqing Jiaotong University,Chongqing 400074,China; 2.School of Traffic and Transportation,Chongqing Jiaotong University,Chongqing 400074,China;3.China Railway Eryuan Engineer- ing Group Co.,Ltd,Chengdu 610031,China) Abstract:To solve the defect that the existing fuzzy intelligent control method is only suitable for a single intersec- tion under unsaturated state,and to meet the need of coordination control of regional traffic for oversaturated multi- ple intersections,an optimization control strategy for main channel at peak time was proposed.The fuzzy control model with multiple decision attributes was established on the basis of knowledge reasoning in rough sets theory.It took multiple intersections state information as condition attributes,and the elongation mode,phase,and green light timing,as decision attributes.The methods of attribute reduction of the discernibility matrix and the frequency of attribute were used in the model,then some decision rules were extracted.The results show that the efficiency of regional traffic was improved via 3-8 more seconds of green light signal at the main channel.In addition,the exten- sion time is not only related to the maximum queue length of vehicles under oversaturated vehicle conditions,but also the extension mode and phase of green light,which is consistent with the experience of traffic police. Keywords:traffic engineering;traffic control;multiple intersections;oversaturated;rough set theory;decision rule 随着我国社会经济的快速发展及城市化进程的 交通“瘫痪”。近年来全国城市汽车保有量年均增 不断加速,城市高度繁荣,但与此同时城市交通拥堵 长15%~20%,有的城市更高达30%,而在有限的城 日益严峻,尤其是早晚高峰时期城区常出现大规模 市空间下道路供给资源增长缓慢,交通供需矛盾日 益突出。 收稿日期:2014-06-22.网络出版日期:2015-09.30. 基金项目:科技部“863”计划资助项目(2011AA110306):国家自然科 交叉口信号控制是通过信号相位对交叉口有限 学基金资助项目(51308569):中国中铁二院工程集团有限 通行资源进行时间分配,但如果交叉口流量超过通 责任公司科研资助项目(2014-50) 通信作者:邵毅明.E-mail:sym@cqjtu.cdu.cn 行能力,则传统的信号控制方法效果不理想,此时交
第 10 卷第 5 期 智 能 系 统 学 报 Vol.10 №.5 2015 年 10 月 CAAI Transactions on Intelligent Systems Oct. 2015 DOI:10.11992 / tis.201406045 网络出版地址:http: / / www.cnki.net / kcms/ detail / 23.1538.tp.201509030.1456.002.html 粗糙集的过饱和多交叉口 协同优化模型研究 陈坚1, 2 ,陈健3 ,邵毅明1, 2 ,邓天民1, 2 (1. 重庆交通大学 山地城市交通系统与安全重庆市重点实验室,重庆 400074; 2. 重庆交通大学 交通运输学院,重庆 400074; 3. 中国中铁二院工程集团有限责任公司,四川 成都 610031) 摘 要:为解决现有模糊智能控制方法仅适用于单交叉口非饱和状态,满足区域交通过饱和多交叉口信号协同联动 控制的需要,提出了高峰时期主通道优化控制策略。 在粗糙集知识推理基础上,构建了以多交叉口状态信息为条件 属性,以绿灯延长方式、绿灯延长相位和绿灯延长时间 3 个参数为决策属性的多决策属性模糊控制模型。 运用可辨 识矩阵与属性频度的属性约简方法对模型进行约简,提取决策规则。 实例分析表明:多交叉口主通道绿灯时间延长 3~ 8 s能够有效提高区域交通整体通行效能,同时延长时间不仅与过饱和状态车辆最大排队长度有关,还与绿灯延 长方式、绿灯延长相位存在关联,这与交警经验总结的控制规律一致。 关键词:交通工程;交通控制;多交叉口;过饱和;粗糙集;决策规则 中图分类号:U491.54 文献标志码:A 文章编号:1673⁃4785(2015)05⁃0783⁃07 中文引用格式:陈坚,陈健,邵毅明,等. 粗糙集的过饱和多交叉口协同优化模型[J]. 智能系统学报, 2015, 10(5): 783⁃789. 英文引用格式:CHEN Jian, CHEN Jian, SHAO Yiming, et al. Collaborative optimization model for oversaturated multiple inter⁃ sections based on the rough set theory[J]. CAAI Transactions on Intelligent Systems, 2015, 10(5): 783⁃789. Collaborative optimization model for oversaturated multiple intersections based on the rough set theory CHEN Jian 1,2 , CHEN Jian 3 , SHAO Yiming 1,2 , DENG Tianmin 1,2 (1. Chongqing Key Lab of Traffic System & Safety in Mountain Cities, Chongqing Jiaotong University, Chongqing 400074, China; 2. School of Traffic and Transportation, Chongqing Jiaotong University, Chongqing 400074, China; 3. China Railway Eryuan Engineer⁃ ing Group Co., Ltd, Chengdu 610031, China) Abstract:To solve the defect that the existing fuzzy intelligent control method is only suitable for a single intersec⁃ tion under unsaturated state, and to meet the need of coordination control of regional traffic for oversaturated multi⁃ ple intersections, an optimization control strategy for main channel at peak time was proposed. The fuzzy control model with multiple decision attributes was established on the basis of knowledge reasoning in rough sets theory. It took multiple intersections state information as condition attributes, and the elongation mode, phase, and green light timing, as decision attributes. The methods of attribute reduction of the discernibility matrix and the frequency of attribute were used in the model, then some decision rules were extracted. The results show that the efficiency of regional traffic was improved via 3⁃8 more seconds of green light signal at the main channel. In addition, the exten⁃ sion time is not only related to the maximum queue length of vehicles under oversaturated vehicle conditions, but also the extension mode and phase of green light, which is consistent with the experience of traffic police. Keywords:traffic engineering; traffic control; multiple intersections; oversaturated; rough set theory; decision rule 收稿日期:2014⁃06⁃22. 网络出版日期:2015⁃09⁃30. 基金项目:科技部“863”计划资助项目(2011AA110306);国家自然科 学基金资助项目(51308569);中国中铁二院工程集团有限 责任公司科研资助项目(2014⁃50). 通信作者:邵毅明. E⁃mail:sym@ cqjtu.edu.cn. 随着我国社会经济的快速发展及城市化进程的 不断加速,城市高度繁荣,但与此同时城市交通拥堵 日益严峻,尤其是早晚高峰时期城区常出现大规模 交通“瘫痪”。 近年来全国城市汽车保有量年均增 长 15% ~20%,有的城市更高达 30%,而在有限的城 市空间下道路供给资源增长缓慢,交通供需矛盾日 益突出。 交叉口信号控制是通过信号相位对交叉口有限 通行资源进行时间分配,但如果交叉口流量超过通 行能力,则传统的信号控制方法效果不理想,此时交
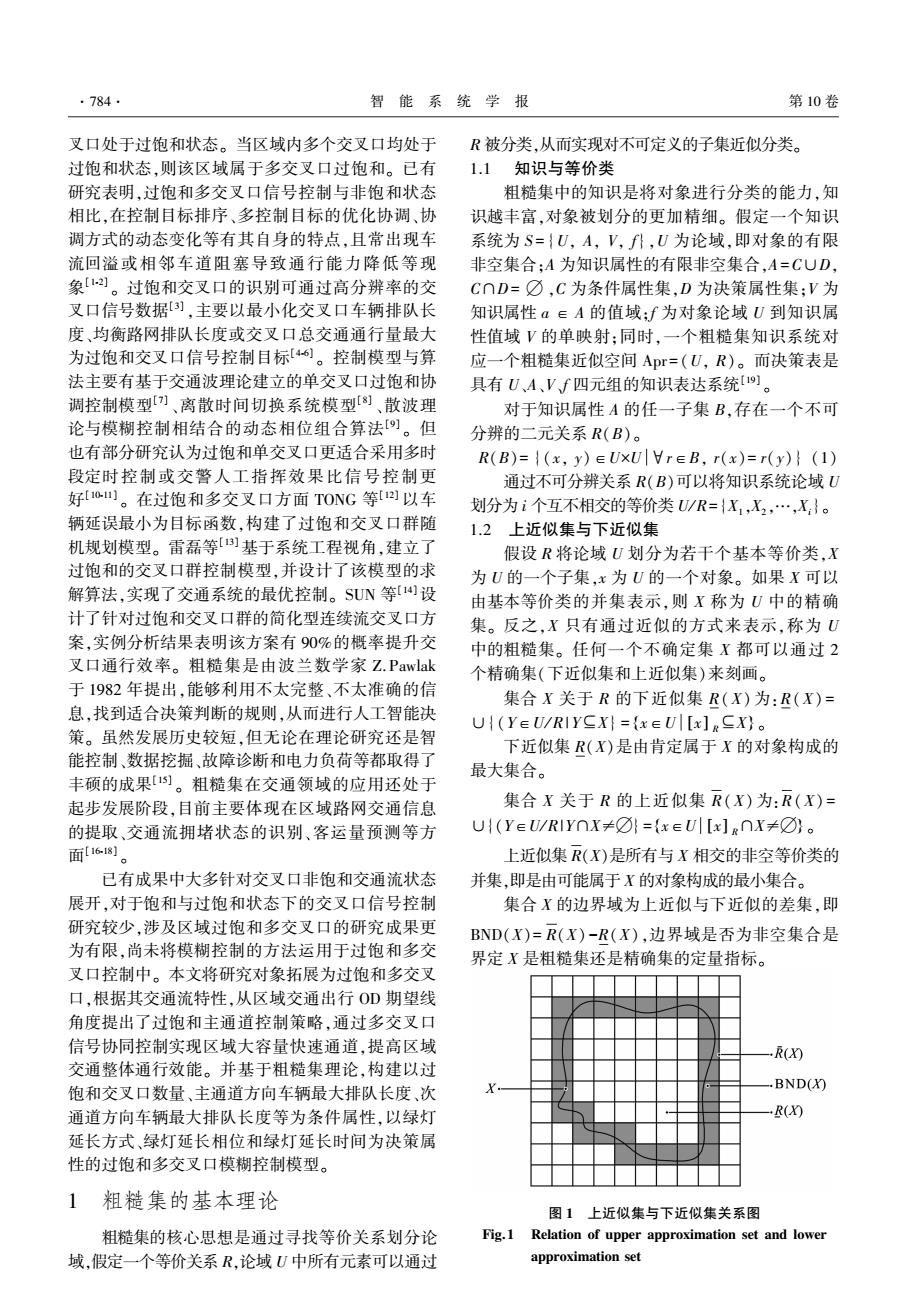
·784 智能系统学报 第10卷 叉口处于过饱和状态。当区域内多个交叉口均处于 R被分类,从而实现对不可定义的子集近似分类。 过饱和状态,则该区域属于多交叉口过饱和。已有 1.1知识与等价类 研究表明,过饱和多交叉口信号控制与非饱和状态 粗糙集中的知识是将对象进行分类的能力,知 相比,在控制目标排序、多控制目标的优化协调、协 识越丰富,对象被划分的更加精细。假定一个知识 调方式的动态变化等有其自身的特点,且常出现车 系统为S={U,A,V,f},U为论域,即对象的有限 流回溢或相邻车道阻塞导致通行能力降低等现 非空集合;A为知识属性的有限非空集合,A=CUD, 象②。过饱和交叉口的识别可通过高分辨率的交 C∩D=⑦,C为条件属性集,D为决策属性集:V为 叉口信号数据[],主要以最小化交叉口车辆排队长 知识属性a∈A的值域:f为对象论域U到知识属 度、均衡路网排队长度或交叉口总交通通行量最大 性值域V的单映射:同时,一个粗糙集知识系统对 为过饱和交叉口信号控制目标46)。控制模型与算 应一个粗糙集近似空间Apr=(U,R)。而决策表是 法主要有基于交通波理论建立的单交叉口过饱和协 具有U、A、Vf四元组的知识表达系统[例 调控制模型)、离散时间切换系统模型)】、散波理 对于知识属性A的任一子集B,存在一个不可 论与模糊控制相结合的动态相位组合算法[9)。但 分辨的二元关系R(B)。 也有部分研究认为过饱和单交叉口更适合采用多时 R(B)={(x,y)∈UxU|Hr∈B,r(x)=r(y)}(I) 段定时控制或交警人工指挥效果比信号控制更 通过不可分辨关系R(B)可以将知识系统论域U 好[1)。在过饱和多交叉口方面TONG等[2]以车 划分为i个互不相交的等价类U/R={X,X2,…,X:}。 辆延误最小为目标函数,构建了过饱和交叉口群随 1.2上近似集与下近似集 机规划模型。雷磊等]基于系统工程视角,建立了 假设R将论域U划分为若千个基本等价类,X 过饱和的交叉口群控制模型,并设计了该模型的求 为U的一个子集,x为U的一个对象。如果X可以 解算法,实现了交通系统的最优控制。SUN等14]设 由基本等价类的并集表示,则X称为U中的精确 计了针对过饱和交叉口群的简化型连续流交叉口方 集。反之,X只有通过近似的方式来表示,称为U 案,实例分析结果表明该方案有90%的概率提升交 中的粗糙集。任何一个不确定集X都可以通过2 叉口通行效率。粗糙集是由波兰数学家Z.Pawlak 个精确集(下近似集和上近似集)来刻画。 于1982年提出,能够利用不太完整、不太准确的信 集合X关于R的下近似集R(X)为:R(X)= 息,找到适合决策判断的规则,从而进行人工智能决 U{(Y∈U/RIYCX}={x∈Ul[x]RCX}。 策。虽然发展历史较短,但无论在理论研究还是智 下近似集R(X)是由肯定属于X的对象构成的 能控制、数据挖掘、故障诊断和电力负荷等都取得了 最大集合。 丰硕的成果)。粗糙集在交通领域的应用还处于 起步发展阶段,目前主要体现在区域路网交通信息 集合X关于R的上近似集R(X)为:R(X)= 的提取、交通流拥堵状态的识别、客运量预测等方 U{(Y∈U/RIYOX≠O}={x∈U|[x]R∩X≠O}。 面1618) 上近似集R(X)是所有与X相交的非空等价类的 已有成果中大多针对交叉口非饱和交通流状态 并集,即是由可能属于X的对象构成的最小集合。 展开,对于饱和与过饱和状态下的交叉口信号控制 集合X的边界域为上近似与下近似的差集,即 研究较少,涉及区域过饱和多交叉口的研究成果更 BND(X)=R(X)-R(X),边界域是否为非空集合是 为有限,尚未将模糊控制的方法运用于过饱和多交 界定X是粗糙集还是精确集的定量指标。 叉口控制中。本文将研究对象拓展为过饱和多交叉 口,根据其交通流特性,从区域交通出行OD期望线 角度提出了过饱和主通道控制策略,通过多交叉口 信号协同控制实现区域大容量快速通道,提高区域 .(X0 交通整体通行效能。并基于粗糙集理论,构建以过 饱和交叉口数量、主通道方向车辆最大排队长度、次 BND(X) 通道方向车辆最大排队长度等为条件属性,以绿灯 R(X) 延长方式、绿灯延长相位和绿灯延长时间为决策属 性的过饱和多交叉口模糊控制模型。 1 粗糙集的基本理论 图1上近似集与下近似集关系图 粗糙集的核心思想是通过寻找等价关系划分论 Fig.1 Relation of upper approximation set and lower 域,假定一个等价关系R,论域U中所有元素可以通过 approximation set
叉口处于过饱和状态。 当区域内多个交叉口均处于 过饱和状态,则该区域属于多交叉口过饱和。 已有 研究表明,过饱和多交叉口信号控制与非饱和状态 相比,在控制目标排序、多控制目标的优化协调、协 调方式的动态变化等有其自身的特点,且常出现车 流回溢或相邻车道阻塞导致通行能力降低等现 象[1⁃2] 。 过饱和交叉口的识别可通过高分辨率的交 叉口信号数据[3] ,主要以最小化交叉口车辆排队长 度、均衡路网排队长度或交叉口总交通通行量最大 为过饱和交叉口信号控制目标[4⁃6] 。 控制模型与算 法主要有基于交通波理论建立的单交叉口过饱和协 调控制模型[7] 、离散时间切换系统模型[8] 、散波理 论与模糊控制相结合的动态相位组合算法[9] 。 但 也有部分研究认为过饱和单交叉口更适合采用多时 段定时控制或交警人工指挥效果比信号控制更 好[10⁃11] 。 在过饱和多交叉口方面 TONG 等[12] 以车 辆延误最小为目标函数,构建了过饱和交叉口群随 机规划模型。 雷磊等[13]基于系统工程视角,建立了 过饱和的交叉口群控制模型,并设计了该模型的求 解算法,实现了交通系统的最优控制。 SUN 等[14]设 计了针对过饱和交叉口群的简化型连续流交叉口方 案,实例分析结果表明该方案有 90%的概率提升交 叉口通行效率。 粗糙集是由波兰数学家 Z. Pawlak 于 1982 年提出,能够利用不太完整、不太准确的信 息,找到适合决策判断的规则,从而进行人工智能决 策。 虽然发展历史较短,但无论在理论研究还是智 能控制、数据挖掘、故障诊断和电力负荷等都取得了 丰硕的成果[15] 。 粗糙集在交通领域的应用还处于 起步发展阶段,目前主要体现在区域路网交通信息 的提取、交通流拥堵状态的识别、客运量预测等方 面[16⁃18] 。 已有成果中大多针对交叉口非饱和交通流状态 展开,对于饱和与过饱和状态下的交叉口信号控制 研究较少,涉及区域过饱和多交叉口的研究成果更 为有限,尚未将模糊控制的方法运用于过饱和多交 叉口控制中。 本文将研究对象拓展为过饱和多交叉 口,根据其交通流特性,从区域交通出行 OD 期望线 角度提出了过饱和主通道控制策略,通过多交叉口 信号协同控制实现区域大容量快速通道,提高区域 交通整体通行效能。 并基于粗糙集理论,构建以过 饱和交叉口数量、主通道方向车辆最大排队长度、次 通道方向车辆最大排队长度等为条件属性,以绿灯 延长方式、绿灯延长相位和绿灯延长时间为决策属 性的过饱和多交叉口模糊控制模型。 1 粗糙集的基本理论 粗糙集的核心思想是通过寻找等价关系划分论 域,假定一个等价关系 R,论域 U 中所有元素可以通过 R 被分类,从而实现对不可定义的子集近似分类。 1.1 知识与等价类 粗糙集中的知识是将对象进行分类的能力,知 识越丰富,对象被划分的更加精细。 假定一个知识 系统为 S = {U, A, V, f},U 为论域,即对象的有限 非空集合;A 为知识属性的有限非空集合,A =C∪D, C∩D= ∅ ,C 为条件属性集,D 为决策属性集;V 为 知识属性 a ∈ A 的值域;f 为对象论域 U 到知识属 性值域 V 的单映射;同时,一个粗糙集知识系统对 应一个粗糙集近似空间 Apr = (U, R)。 而决策表是 具有 U、A、V、f 四元组的知识表达系统[19] 。 对于知识属性 A 的任一子集 B,存在一个不可 分辨的二元关系 R(B)。 R(B)= {(x, y)∈U×U ∀r∈B, r(x)= r(y)} (1) 通过不可分辨关系 R(B)可以将知识系统论域 U 划分为 i 个互不相交的等价类 U/ R={X1,X2,…,Xi}。 1.2 上近似集与下近似集 假设 R 将论域 U 划分为若干个基本等价类,X 为 U 的一个子集,x 为 U 的一个对象。 如果 X 可以 由基本等价类的并集表示,则 X 称为 U 中的精确 集。 反之,X 只有通过近似的方式来表示,称为 U 中的粗糙集。 任何一个不确定集 X 都可以通过 2 个精确集(下近似集和上近似集)来刻画。 集合 X 关于 R 的下近似集 R(X) 为:R(X) = ∪{(Y∈U/ R | Y⊆X} = x∈U [x] { R⊆X} 。 下近似集 R(X)是由肯定属于 X 的对象构成的 最大集合。 集合 X 关于 R 的上近似集 R(X) 为:R(X) = ∪{(Y∈U/ R|Y∩X≠∅} = x∈U [x] { R∩X≠∅} 。 上近似集 R(X)是所有与 X 相交的非空等价类的 并集,即是由可能属于 X 的对象构成的最小集合。 集合 X 的边界域为上近似与下近似的差集,即 BND(X)= R(X) -R(X),边界域是否为非空集合是 界定 X 是粗糙集还是精确集的定量指标。 图 1 上近似集与下近似集关系图 Fig.1 Relation of upper approximation set and lower approximation set ·784· 智 能 系 统 学 报 第 10 卷
第5期 陈坚,等:粗糙集的过饱和多交叉口协同优化模型研究 ·785 1.3属性约简 红灯时段内第j个车道的车辆排队长度,0≤j≤J。 属性约简是粗糙集具体应用的重要步骤,如果 决策属性值的确定是以条件属性值为基础参 知识系统S中,知识属性元素a为不必要属性的充 数,以区域多交叉口总延误最小为目标函数,在Sym 要条件是U/C=U/(C-{a})。反之,如果U/C≠U/ chro平台多次仿真比较从而确定的最优值。所构建 (C-{a}),则a为必要属性。因此,粗糙集中的一 的协同优化控制模型重要作用在于从每一行条件属 个属性约简P满足: 性数据仿真得到一次最优值的繁琐计算或是交警人 U/C=U/P (2) 工经验决策的基础上,通过粗糙集工具提取抽象决 Ha∈P,U/C≠U/(P-{a}) (3) 策规则,从而为不同城市不同区域的多交叉口过饱 所有约简P构成的集合为ed(P),而P中所有 和智能控制提供决策建议。 必要关系组成的集合为P的核,记为:Core(P)。属 2.3属性值模糊化 性约简剔除了条件属性中的不必要属性,又保证了 为避免属性值的连续性,将第n个交叉口主、次 知识系统分类与决策能力不受影响,其中核是所有 通道方向上最大排队长度q和q的属性值不再采 属性约简的基础,是知识中最重要部分特征集合,在 用其实际排队长度值,而是通过线性分布的隶属函 约简中不能被删除。 数进行模糊化处理,在qn和q的论域上定义7个模 糊语言子集{很短S,短S,较短RS,一般M,较长 2协同优化模型 L,长L,很长L},所对应的属性值为{0,1,2,3, 2.1通道划分 4,5,6}。 过饱和多交叉协同优化模型是通过延长区域某 分别将q和g.的多组实际数据的最大值和最 方向绿灯相位时长以打通城市交通出行重要主通 小值,按等步长离散为7级,记为gn~qn和qm~q, 道,减少也已经饱和的次通道绿灯相位时长的控制 则qn和qm对属于第k级的隶属度计算方法如式 策略。其中,主通道方向是整个城市交通出行主要 (6)、(7)所示0,最大隶属度所对应的级别为gn和 OD期望线在该区域的通过方向,具体计算可通过 qm属性值。 各交叉口进口道交通流量进行OD反推,次通道则 o 9n≤9n,9n≥9 为交叉口与主通道相交的其他进口道方向。主通道 n= 39m9 (6) 控制策略是将交叉口时间资源向某一方向通行倾 g-92 9≤9n≤9 斜,从而激活区域交通关键方向通路,实现区域整体 交通的畅通。主通道控制策略不同于干道绿波带, 0 qn≤g点,9n≥g 绿波带是从通行速度的角度对交叉口信号配时进行 we=9on-qon (7) 9-4 g点≤9≤9 优化,而主通道策略是以区域交通整体效能(效率 与能力)最大化为目标进行信号控制。 式中:9m为第n个交叉口主通道方向的实际最大排 2.2属性选择 队长度,qm第n个交叉口次通道方向的实际最大排 模型以过饱和交叉口数量、各交叉口主次通道 队长度,n为qm属于第k级的隶属度,为qm属于 最大车辆排队长度为条件属性,分别以绿灯延长方 第k级的隶属度,g为主通道方向第k级的上限值, 式、绿灯延长相位和绿灯延长时间为决策属性,从而 q为次通道方向第k级的上限值。 构建同一条件属性不同决策属性的3个决策表。模 条件属性中交叉口数量已经为离散型数据,则 型不采用高峰时间交叉口各进口道流量之和作为条 以实际整数值为N的属性值,如:区域内过饱和交 件属性,是考虑各交叉口进口道通行能力不一致,如 叉口数量为1,则N=1。 果单纯以进口道流量为条件属性将导致信号控制失 决策属性中绿灯延长方式W是指哪些交叉口 实。交叉口主、次通道最大车辆排队长度分别如式 主通道方向绿灯时间延长,根据区域交叉口交通控 (4)~(5)所示: 制实际情况,模型中绿灯延长方式定义为过饱和交 9n=max{9nl,9m2,…,9l} (4) 叉口主通道方向绿灯时长延长和所有交叉口主通道 qe max qenl,qem2,..,qon (5) 方向绿灯时长都延长2种情况,属性值分别对应为 式中:区域内过饱和交叉口总数量为N;9m为第n W=0,W=1。绿灯延长相位E是指交叉口主通道方 个交叉口主通道方向红灯时段内第i个车道的车辆 向哪些相位绿灯时间延长,定义绿灯延长相位取值 排队长度,0≤i≤I;9m为第n个交叉口次通道方向 E=0,指主通道直行相位绿灯时间延长,次通道左转
1.3 属性约简 属性约简是粗糙集具体应用的重要步骤,如果 知识系统 S 中,知识属性元素 a 为不必要属性的充 要条件是 U/ C =U/ (C-{a})。 反之,如果 U/ C≠U/ (C-{a}),则 a 为必要属性。 因此,粗糙集中的一 个属性约简 P 满足: U/ C =U/ P (2) ∀a∈P,U/ C≠U/ (P-{a}) (3) 所有约简 P 构成的集合为 red(P),而 P 中所有 必要关系组成的集合为 P 的核,记为:Core(P)。 属 性约简剔除了条件属性中的不必要属性,又保证了 知识系统分类与决策能力不受影响,其中核是所有 属性约简的基础,是知识中最重要部分特征集合,在 约简中不能被删除。 2 协同优化模型 2.1 通道划分 过饱和多交叉协同优化模型是通过延长区域某 方向绿灯相位时长以打通城市交通出行重要主通 道,减少也已经饱和的次通道绿灯相位时长的控制 策略。 其中,主通道方向是整个城市交通出行主要 OD 期望线在该区域的通过方向,具体计算可通过 各交叉口进口道交通流量进行 OD 反推,次通道则 为交叉口与主通道相交的其他进口道方向。 主通道 控制策略是将交叉口时间资源向某一方向通行倾 斜,从而激活区域交通关键方向通路,实现区域整体 交通的畅通。 主通道控制策略不同于干道绿波带, 绿波带是从通行速度的角度对交叉口信号配时进行 优化,而主通道策略是以区域交通整体效能(效率 与能力)最大化为目标进行信号控制。 2.2 属性选择 模型以过饱和交叉口数量、各交叉口主次通道 最大车辆排队长度为条件属性,分别以绿灯延长方 式、绿灯延长相位和绿灯延长时间为决策属性,从而 构建同一条件属性不同决策属性的 3 个决策表。 模 型不采用高峰时间交叉口各进口道流量之和作为条 件属性,是考虑各交叉口进口道通行能力不一致,如 果单纯以进口道流量为条件属性将导致信号控制失 实。 交叉口主、次通道最大车辆排队长度分别如式 (4) ~ (5)所示: qzn =max{qzn1 , qzn2 ,…, qznI} (4) qcn =max{qcn1 , qcn2 ,…, qcnJ} (5) 式中:区域内过饱和交叉口总数量为 N;qzni 为第 n 个交叉口主通道方向红灯时段内第 i 个车道的车辆 排队长度,0≤i≤I;qcnj为第 n 个交叉口次通道方向 红灯时段内第 j 个车道的车辆排队长度,0≤j≤J。 决策属性值的确定是以条件属性值为基础参 数,以区域多交叉口总延误最小为目标函数,在 Syn⁃ chro 平台多次仿真比较从而确定的最优值。 所构建 的协同优化控制模型重要作用在于从每一行条件属 性数据仿真得到一次最优值的繁琐计算或是交警人 工经验决策的基础上,通过粗糙集工具提取抽象决 策规则,从而为不同城市不同区域的多交叉口过饱 和智能控制提供决策建议。 2.3 属性值模糊化 为避免属性值的连续性,将第 n 个交叉口主、次 通道方向上最大排队长度 qzn和 qcn的属性值不再采 用其实际排队长度值,而是通过线性分布的隶属函 数进行模糊化处理,在 qzn和 qcn的论域上定义 7 个模 糊语言子集{很短 VS,短 S,较短 RS,一般 M,较长 RL,长 L,很长 VL},所对应的属性值为{0, 1, 2, 3, 4, 5, 6}。 分别将 qzn和 qcn的多组实际数据的最大值和最 小值,按等步长离散为 7 级,记为 q 1 zn ~ q 7 zn和 q 1 cn ~ q 7 cn , 则 qzn和 qcn 对属于第 k 级的隶属度计算方法如式 (6)、(7)所示[20] ,最大隶属度所对应的级别为 qzn和 qcn属性值。 μ k zn = 0 qzn≤ q k zn ,qzn≥ q k+1 zn qzn - q k zn q k+1 zn - q k zn q k zn≤ qzn≤ q k+1 zn ì î í ï ï ï ï (6) μ k cn = 0 qcn≤ q k cn ,qcn≥ q k+1 cn qcn - q k cn q k+1 cn - q k cn q k cn≤ qcn≤ q k+1 cn ì î í ï ï ï ï (7) 式中:qzn为第 n 个交叉口主通道方向的实际最大排 队长度,qcn第 n 个交叉口次通道方向的实际最大排 队长度,μ k zn为 qzn属于第 k 级的隶属度,μ k cn为 qcn属于 第 k 级的隶属度,q k zn为主通道方向第 k 级的上限值, q k cn为次通道方向第 k 级的上限值。 条件属性中交叉口数量已经为离散型数据,则 以实际整数值为 N 的属性值,如:区域内过饱和交 叉口数量为 1,则 N= 1。 决策属性中绿灯延长方式 W 是指哪些交叉口 主通道方向绿灯时间延长,根据区域交叉口交通控 制实际情况,模型中绿灯延长方式定义为过饱和交 叉口主通道方向绿灯时长延长和所有交叉口主通道 方向绿灯时长都延长 2 种情况,属性值分别对应为 W= 0,W= 1。 绿灯延长相位 E 是指交叉口主通道方 向哪些相位绿灯时间延长,定义绿灯延长相位取值 E = 0,指主通道直行相位绿灯时间延长,次通道左转 第 5 期 陈坚,等:粗糙集的过饱和多交叉口协同优化模型研究 ·785·

·786 智能系统学报 第10卷 相位绿灯时间减少:E=1,指主通道直行和左转相位 对应的决策属性,提取多交叉口过饱和优化控制决 绿灯时间都延长,次通道直行和左转相位绿灯时间减 策规则。 少。绿灯延长时间G属性值为延长时间的实际值。 2.5评价指标计算 2.4决策表构建与属性约简 规则提取后的评价指标计算是检验规则准确 2.4.1决策表构建 信息涵盖量的重要依据,采用规则支持度、精确度和 将条件属性与决策属性数据采集并进行相应模 覆盖度3个指标进行衡量。具体指标为[20] 糊化处理,从而形成含有2N+1个条件属性、3个决 Support(X,→D)=|X,∩DI (9) 策属性的多交叉口过饱和优化控制决策表,由于3 Accuracy(X:→D)=IX,∩D,I/IX,I (10) 个决策属性无法同时约简,需要一一约简,实则相当 Coverage(X,→D)=IX,∩D,l/ID,l(11) 于3个决策表。 式中:1·|表示集合中的元素个数,该元素是指论域 2.4.2基于可辨识矩阵与属性频度的属性约简 中的数据项即决策表中的一行。将评价指标中精度 假设1个决策表T=(U,CUD),IU川=n,决策 低于50%的规则剔除,以保证规则的有效性。 表T所对应的可辨识矩阵为M=(Cg)x,其中: 3实例分析 {aEa∈CAa(x:)≠a(x)},d(x)≠d(x) = 0,d(x)=d(x) 以重庆市江北区新南路4个连续交叉口为实例 (8) 分析对象,新南路位于重庆市北环高速以南,是贯穿 可辨识矩阵是关于对角线对称的矩阵,且对角 江北区东西方向的重要主千道,周边分布有大型住 线元素均为0。当论域U中的2个元素x,和x所对 宅、商业和办公等多种业态。其中,交叉口4为新南 应的决策属性值相同时,可辨识矩阵中元素取0:反 路与星光大道交叉口,星光大道是江北区南北方向 之,可辨识矩阵中元素取值为二者条件属性中的不 主干道,早晚高峰时期,新南路该4个交叉口均处于 同值。同时,通过条件属性a在可辨识矩阵M出现 过饱和状态。交叉口的地理分布如图2所示,Sy 的次数p(a)以表征属性a的重要程度,p(a)= chro软件中仿真图如图3所示,由于重庆市江北区 SGF(a,R,D)。 主要交通出行OD期望线为东西方向,因此确定新 基于可辨识矩阵与属性频度的属性约简的算法 南路为主通道方向,与之垂直的各道路方向为次通 思想是将决策表转化为可辨识矩阵,以获得所有非 道方向。 核条件属性在可辨识矩阵出现的次数,从而将次数 最大的非核条件属性纳入约简集合中,删除包含该 属性的所有属性组合[22】。具体算法步骤如下: 1)如果决策表中的条件属性值与决策属性值 存在连续变量,则进行离散化处理。属性约简集合 B=O,Core=⑦. 2)根据决策表与式(8)生成可辨识矩阵M。 3)找出可辨识矩阵的核集合Core(属性组合数 图2重庆市江北区新南路4个交叉口地理分布 为I),并更新约简集合B=Core。 Fig.2 Geographical distribution of four intersections in 4)删除可辨识矩阵中与B交集不为空的元素, Xinnan road,Jiangbei district,Chongqing M=M-Q,Q={C,|C,∩B=☑};并且从条件属性集 合C中删除B中元素,C=C-B。 5)计算条件属性集合C中剩余的所有元素在 可辨识矩阵M中出现的次数p(c),将最大次数所 对应的元素添加入约简属性集合B中,B=B+C, p(c)=maxp(c) 6)如果M=⑦,则输出约简集合B:否则,返 回3)。 图3新南路交叉口仿真建模 Fig.3 Simulation modeling of Xinnan road intersec- 2.4.3规则提取 tions 根据约简集合B中的条件属性元素构成及所
相位绿灯时间减少;E = 1,指主通道直行和左转相位 绿灯时间都延长,次通道直行和左转相位绿灯时间减 少。 绿灯延长时间 G 属性值为延长时间的实际值。 2.4 决策表构建与属性约简 2.4.1 决策表构建 将条件属性与决策属性数据采集并进行相应模 糊化处理,从而形成含有 2N+1 个条件属性、3 个决 策属性的多交叉口过饱和优化控制决策表,由于 3 个决策属性无法同时约简,需要一一约简,实则相当 于 3 个决策表。 2.4.2 基于可辨识矩阵与属性频度的属性约简 假设 1 个决策表 T = (U,C∪D), | U | = n,决策 表 T 所对应的可辨识矩阵为 M= (Cij)n×n ,其中: Cij = ak ak ∈ C ∧ ak(xi) ≠ ak(x { j)} ,d(xi) ≠ d(xj) 0,d(xi) = d(x { j) (8) 可辨识矩阵是关于对角线对称的矩阵,且对角 线元素均为 0。 当论域 U 中的 2 个元素 xi和 xj所对 应的决策属性值相同时,可辨识矩阵中元素取 0;反 之,可辨识矩阵中元素取值为二者条件属性中的不 同值。 同时,通过条件属性 a 在可辨识矩阵 M 出现 的次数 p ( a) 以表征属性 a 的重要程度, p ( a) = SGF(a, R, D)。 基于可辨识矩阵与属性频度的属性约简的算法 思想是将决策表转化为可辨识矩阵,以获得所有非 核条件属性在可辨识矩阵出现的次数,从而将次数 最大的非核条件属性纳入约简集合中,删除包含该 属性的所有属性组合[21⁃22 ] 。 具体算法步骤如下: 1)如果决策表中的条件属性值与决策属性值 存在连续变量,则进行离散化处理。 属性约简集合 B =∅,Core =∅。 2)根据决策表与式(8)生成可辨识矩阵 M。 3)找出可辨识矩阵的核集合 Core(属性组合数 为 1),并更新约简集合 B =Core。 4)删除可辨识矩阵中与 B 交集不为空的元素, M=M-Q,Q= {Cij Cij∩B =∅};并且从条件属性集 合 C 中删除 B 中元素,C =C-B。 5)计算条件属性集合 C 中剩余的所有元素在 可辨识矩阵 M 中出现的次数 p( c),将最大次数所 对应的元素添加入约简属性集合 B 中,B = B +cq, p(cq)= max{p(c)}。 6)如果 M = ∅,则输出约简集合 B;否则,返 回 3)。 2.4.3 规则提取 根据约简集合 B 中的条件属性元素构成及所 对应的决策属性,提取多交叉口过饱和优化控制决 策规则。 2.5 评价指标计算 规则提取后的评价指标计算是检验规则准确、 信息涵盖量的重要依据,采用规则支持度、精确度和 覆盖度 3 个指标进行衡量。 具体指标为[20] Support(Xi→Dj)= |Xi∩Dj | (9) Accuracy(Xi→Dj)= |Xi∩Dj | / |Xi | (10) Coverage(Xi→Dj)= |Xi∩Dj | / | Dj | (11) 式中: |·|表示集合中的元素个数,该元素是指论域 中的数据项即决策表中的一行。 将评价指标中精度 低于 50%的规则剔除,以保证规则的有效性。 3 实例分析 以重庆市江北区新南路 4 个连续交叉口为实例 分析对象,新南路位于重庆市北环高速以南,是贯穿 江北区东西方向的重要主干道,周边分布有大型住 宅、商业和办公等多种业态。 其中,交叉口 4 为新南 路与星光大道交叉口,星光大道是江北区南北方向 主干道,早晚高峰时期,新南路该 4 个交叉口均处于 过饱和状态。 交叉口的地理分布如图 2 所示,Syn⁃ chro 软件中仿真图如图 3 所示,由于重庆市江北区 主要交通出行 OD 期望线为东西方向,因此确定新 南路为主通道方向,与之垂直的各道路方向为次通 道方向。 图 2 重庆市江北区新南路 4 个交叉口地理分布 Fig.2 Geographical distribution of four intersections in Xinnan road, Jiangbei district, Chongqing 图 3 新南路交叉口仿真建模 Fig.3 Simulation modeling of Xinnan road intersec⁃ tions ·786· 智 能 系 统 学 报 第 10 卷
第5期 陈坚,等:粗糙集的过饱和多交叉口协同优化模型研究 ·787. 通过多天晚高峰交叉口实际数据连续调查,并 表3以E为决策属性的决策表约简结果 根据式(4)~(7)得到4个交叉口过饱和优化控制 Table 3 Reduction result of decision table on E as decision 的10种情景条件属性值。将各种情景中的交叉口 attribute 进口道流量数据输入Synchro仿真软件,优化得出 9 94 Support Accuracy Coverage 信号配时方案。人工多次实验调整交叉口主通道方 2 0 2 0.29 向绿灯延长方式、绿灯延长相位及绿灯延长时间,当 3 4 0 1 0.14 总延误时长指标最优时,该次实验参数值即为决策 3 5 0 2 1 0.29 属性值,具体决策表如表1所示。 6 0.14 表1多交叉口过饱和优化控制决策表 Table 1 Optimization control decision of oversaturated 6 0.33 multi-intersection 5 5 1 0.33 序 条件属性 决策属性 以G为决策属性,得到约简集合为{q1,9a, 号N99a9a9a9a99494 W E G 9}。将相同决策规则合并,最终约简结果如表4 43233 4 3 5 4003 所示。 表4以G为决策属性的决策表约简结果 2 6 Table 4 Reduction result of decision table on G as decision attribute 3 0 5 0 0 93 9s G Support Accuracy Coverage 5 3 0.25 3 2 4 5 3 2 0.50 5 3 3 4 4 1 0.33 0 0 3 4 0.33 0 1 3 d 5 0.50 9 5 4 5 5 1 0 0 3 0.50 3 6 1 1.00 10443445445104 根据3组决策表约简结果提取得出4个过饱和 以W为决策属性,根据决策表约简算法,得到 交叉口的模糊控制决策规则如表5所示。 约简集合为{92,9a,9}。将相同决策规则合并,并 表5模糊控制决策规则 通过式(9)~(11)计算各决策规则评价指标值如表 Table 5 Fuzzy control decision rules 2所示。 条件属性 决策属性 表2以W为决策属性的决策表约简结果 Table 2 Reduction result of decision table on W as decision 92 q8 94 E attribute RS RS M M L 0 0 92 94 W Support Accuracy Coverage RS M RL L 0 0 3 0 0.17 M RL M RL 0 0 4 0 L M RL 1 4 3 4 5 3 0.50 L RL RL L VL 4 3 0 0.17 L RL L 6 0.25 RL L RL 7 0.25 对表5的模糊决策规则进行分析讨论:1)当交 6 0.25 叉口1、2、3主通道方向排队长度级别为一般(M)以 同理,以E为决策属性,得到约简集合为{91, 上时,交叉口绿灯信号延长的方式可以从仅过饱和 9}。将相同决策规则合并,最终约简结果如表3 交叉口主通道方向绿灯时间延长扩展到与过饱和交 所示。 叉口相邻的其它交叉口相同方向绿灯时间也相应延
通过多天晚高峰交叉口实际数据连续调查,并 根据式(4) ~ (7)得到 4 个交叉口过饱和优化控制 的 10 种情景条件属性值。 将各种情景中的交叉口 进口道流量数据输入 Synchro 仿真软件,优化得出 信号配时方案。 人工多次实验调整交叉口主通道方 向绿灯延长方式、绿灯延长相位及绿灯延长时间,当 总延误时长指标最优时,该次实验参数值即为决策 属性值,具体决策表如表 1 所示。 表 1 多交叉口过饱和优化控制决策表 Table 1 Optimization control decision of oversaturated multi⁃intersection 序 号 条件属性 决策属性 N qz1 qc1 qz2 qc2 qz3 qc3 qz4 qc4 W E G 1 4 3 2 3 3 4 3 5 4 0 0 3 2 4 4 3 5 5 4 2 6 5 1 1 7 3 4 3 4 4 3 5 5 6 6 1 0 5 4 4 3 3 4 4 3 4 4 5 0 0 4 5 4 2 2 3 2 3 3 5 5 0 0 3 6 4 5 5 5 4 4 3 5 6 1 1 5 7 4 3 3 3 4 4 3 5 5 0 0 4 8 4 4 3 4 4 5 4 4 5 0 1 3 9 4 2 2 3 2 4 3 5 5 0 0 3 10 4 4 3 4 4 5 4 4 5 1 0 4 以 W 为决策属性,根据决策表约简算法,得到 约简集合为{qz2 ,qz3 ,qz4 }。 将相同决策规则合并,并 通过式(9) ~ (11)计算各决策规则评价指标值如表 2 所示。 表 2 以 W 为决策属性的决策表约简结果 Table 2 Reduction result of decision table on W as decision attribute qz2 qz3 qz4 W Support Accuracy Coverage 3 3 5 0 1 1 0.17 3 4 5 0 3 1 0.50 4 3 4 0 1 1 0.17 4 5 6 1 1 1 0.25 5 4 5 1 1 1 0.25 5 4 6 1 1 1 0.25 同理,以 E 为决策属性,得到约简集合为{ qz1 , qz4 }。 将相同决策规则合并,最终约简结果如表 3 所示。 表 3 以 E 为决策属性的决策表约简结果 Table 3 Reduction result of decision table on E as decision attribute qz1 qz4 E Support Accuracy Coverage 2 5 0 2 1 0.29 3 4 0 1 1 0.14 3 5 0 2 1 0.29 3 6 0 1 1 0.14 4 6 1 1 1 0.33 5 5 1 1 1 0.33 以 G 为决策属性,得到约简集合为{ qc1 ,qz3 , qz4 }。 将相同决策规则合并,最终约简结果如表 4 所示。 表 4 以 G 为决策属性的决策表约简结果 Table 4 Reduction result of decision table on G as decision attribute qc1 qz3 qz4 G Support Accuracy Coverage 2 3 5 3 1 1 0.25 2 4 5 3 2 1 0.50 3 3 4 4 1 1 0.33 3 4 5 4 1 1 0.33 4 5 6 5 1 1 0.50 5 4 5 5 1 1 0.50 3 4 6 7 1 1 1.00 根据 3 组决策表约简结果提取得出 4 个过饱和 交叉口的模糊控制决策规则如表 5 所示。 表 5 模糊控制决策规则 Table 5 Fuzzy control decision rules 条件属性 决策属性 qz1 qc1 qz2 qz3 qz4 W E G RS RS M M L 0 0 3 M RS M RL L 0 0 3 M M RL M RL 0 0 4 L M L RL L 1 1 4 M RL RL L VL 1 1 5 / L / RL L / / 5 RL M L RL VL 1 1 7 对表 5 的模糊决策规则进行分析讨论:1)当交 叉口 1、2、3 主通道方向排队长度级别为一般(M)以 上时,交叉口绿灯信号延长的方式可以从仅过饱和 交叉口主通道方向绿灯时间延长扩展到与过饱和交 叉口相邻的其它交叉口相同方向绿灯时间也相应延 第 5 期 陈坚,等:粗糙集的过饱和多交叉口协同优化模型研究 ·787·