第3卷第1期 智能系统学报 Vol.3№1 2008年2月 CAAI Transactions on Intelligent Systems Fcb.2008 多边形序列的最短路径算法 李发捷,KL ETTE Reinhard (1.格罗宁根大学数学与计算科学学院,荷兰格罗宁根9700:2.奥克兰大学计算机科学系,新西兰奥克兰1142) 摘要:给定平面上一个含k个简单多边形的序列及一个起点p和一个终点q,近似地计算一条最短路径使得它开 始于P点,然后按指定的次序访问每个多边形,最后终止于q点.如果多边形是两两不相交且是非凸的,那么此问题 至今还没有算法解.应用一种R算法,给出复杂性为x(9·O(W的一种近似算法,这里n是给定多边形的顶点总数, 函数x(g定义为L。与L的差与e的商,其中Lo是初始路径长度,L是最优路径长度,e是计算精确度.给定的R算 法稍作修改也能用来近似地解决3个NP完全或NP困难的三维欧几里德最短路径问题(ESP).它们的复杂性均为 k(9·O(利,这里k是含有所给定的障碍物的堆的层数. 关键词:算法;最短路径;旅游多边形;部件切割;q矩形 中图分类号:TP202+7文献标识码:A文章编号:1673-4785(2008)01-0023-08 Shortest path algorithms for sequences of polygons LI Fa-jie',KL ETTE Reinhard2 (1.Institute for Mathematics and Computing Science,University of Groningen P.O.Box 800,9700 AV Groningen,The Nether- lands;2.Computer Science Department,The University of Auckland Private Bag 92019,Auckland 1142,New Zealand) Abstract:Given a sequence of k simple polygons in a plane,and a start point p,a target point q.We ap- proximately compute a shortest path that starts at p,then visit each of the polygons in the specified order, and finally end at g.So far no solution is known if the polygons are disjoint with each other and nomcon- vex.By applying a rubberband algorithm,we give an approximate algorithm with time complexity in K(O(n,where n is the total number of vertices of the given polygons,and function K(is the differ- ence between Lo and L over e,where Lo is the length of the initial path,and L is the true (i.e.,optimum) path length.The given rubberband algorithm can also be applied to solve approximately three NP-complete or NPhard 3D Euclidean shortest path (ESP)problems in K((,where k is the number of layers in a stack which contains the defined obstacles. Key words:rubberband algorithm;shortest paths;touring polygons;parts cutting;qrectangles 1问题的提出 本文报告R算法的一些应用.R算法最初由文 献[1]提出,然后文献[2]加以详细研究.在详细说 1.1旅游多边形问题 明R算法之前,首先描述2个紧密相关的问题,旅 回忆文献[3所引入的一些概念和符号.该文首 游多边形问题和部件切割问题,文中将给出它们的 次提出旅游多边形问题.假设π是一个平面,它可以 近似解.本文第2节介绍R算法的基本原理和一些 表示成R.考虑多边形P,Cπ,这里i=1,2,k及 应用时应注意的问题,第3节举例说明它关于旅游 两点p,g∈刀假如pm=p及p+1=q,p:∈R2,此处 多边形问题和q矩形问题的应用,第4节结束 i=1,2,k,p以p,pi,pm,p,q)表示路径ppmp 全文 …paq CRi.假如p(p,q〉表示路径p(p,p1,p, 收稿日期:2007-0616. pk,q〉不会引起混淆,p,∈P,满足p,是aP,∩p(p 通讯作者:李发捷.上mail:F.li@rug.nl. p〉上的沿着路径第一点(aP,表示P,的边界,以下 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
第 3 卷第 1 期 智 能 系 统 学 报 Vol. 3 №. 1 2008 年 2 月 CAA I Transactions on Intelligent Systems Feb. 2008 多边形序列的最短路径算法 李发捷1 , KL ETTE Reinhard 2 (1. 格罗宁根大学 数学与计算科学学院 ,荷兰 格罗宁根 9700 ;2. 奥克兰大学 计算机科学系 ,新西兰 奥克兰 1142) 摘 要 :给定平面上一个含 k 个简单多边形的序列及一个起点 p 和一个终点 q ,近似地计算一条最短路径使得它开 始于 p 点 ,然后按指定的次序访问每个多边形 ,最后终止于 q点. 如果多边形是两两不相交且是非凸的 ,那么此问题 至今还没有算法解. 应用一种 R 算法 ,给出复杂性为κ(ε) ·O( n) 的一种近似算法 ,这里 n 是给定多边形的顶点总数 , 函数κ(ε) 定义为 L0 与 L 的差与ε的商 ,其中 L0 是初始路径长度 , L 是最优路径长度 ,ε是计算精确度. 给定的 R 算 法稍作修改也能用来近似地解决 3 个 NP 完全或 NP 困难的三维欧几里德最短路径问题 ( ESP) . 它们的复杂性均为 κ(ε) ·O( k) ,这里 k 是含有所给定的障碍物的堆的层数. 关键词 :R 算法 ;最短路径 ;旅游多边形 ;部件切割 ;q 矩形 中图分类号 : TP202 + 7 文献标识码 :A 文章编号 :167324785 (2008) 0120023208 Shortest path algorithms for sequences of polygons L I Fa2jie 1 , KL ETTE Reinhard 2 (1. Institute for Mathematics and Computing Science , University of Groningen P. O. Box 800 ,9700 AV Groningen ,The Nether2 lands; 2. Computer Science Department , The University of Auckland Private Bag 92019 , Auckland 1142 , New Zealand) Abstract :Given a sequence of k simple polygons in a plane , and a start point p , a target point q. We ap2 proximately comp ute a shortest pat h that starts at p , t hen visit each of t he polygons in t he specified order , and finally end at q. So far no solution is known if t he polygons are disjoint wit h each ot her and non2con2 vex. By applying a rubberband algorit hm , we give an approximate algorit hm with time complexity in κ(ε) ·O( n) , where n is t he total number of vertices of t he given polygons , and f unctionκ(ε) is the differ2 ence between L0 and L overε, where L0 is the length of t he initial pat h , and L is the true (i. e. , optimum) path lengt h. The given rubberband algorithm can also be applied to solve app roximately t hree N P2complete or NP2hard 3D Euclidean shortest pat h ( ESP) problems inκ(ε) ·O( k) , where k is t he number of layers in a stack which contains the defined obstacles. Keywords :rubberband algorit hm ;shortest pat hs ; touring polygons ; parts cutting ; q2rectangles 收稿日期 :2007206216. 通讯作者 :李发捷. E2mail : F. li @rug. nl. 本文报告 R 算法的一些应用. R 算法最初由文 献[ 1 ]提出 ,然后文献[ 2 ]加以详细研究. 在详细说 明 R 算法之前 ,首先描述 2 个紧密相关的问题 ,旅 游多边形问题和部件切割问题 ,文中将给出它们的 近似解. 本文第 2 节介绍 R 算法的基本原理和一些 应用时应注意的问题 ,第 3 节举例说明它关于旅游 多边形问题和 q 矩形问题的应用 , 第 4 节结束 全文. 1 问题的提出 111 旅游多边形问题 回忆文献[3 ]所引入的一些概念和符号. 该文首 次提出旅游多边形问题. 假设π是一个平面 ,它可以 表示成 R 2 . 考虑多边形 Pi <π,这里 i = 1 ,2 , …, k 及 两点 p , g ∈π. 假如 p0 = p 及 p k + 1 = q , pi ∈R 2 ,此处 i = 1 ,2 , …, k ,ρ〈p , p1 , p2 , …, pk , q〉表示路径 p p1 p2 …pkq < R 2 . 假如ρ〈p , q〉表示路径ρ〈p , p1 , p2 , …, pk , q〉不会引起混淆 , pi ∈Pi 满足 p i 是 9 Pi ∩ρ〈p , pi〉上的沿着路径第一点( 9 Pi 表示 Pi 的边界 ,以下

·24 智能系统学报 第3卷 同),那么说路径p(p,q〉访问P于p,点,此处i= 1,2,…k 无约束TPP问题定义如下: 在平面上如何寻找出一条欧几里德最短路径 Pp,p,p,p,q〉,使得它按给定次序(i=1,2, 付访问每个多边形P 假定对于任意i,j∈1,2,…k,0P∩8P= 0,而且每个P,都是凸的,文献37讨论这类特别情 形并且给出复杂性为O(kdog(W))的算法解.这 图1说明文献[4]中简化的PTSP(假定这里多边形 里n是平面π上所有多边形P,的顶点总数,1=1, 按照给定次序访问) 2,…k Fig 1 Illustration for the simplified P TSP in Ref.[4]where 根据他们的结果,文献3指出,“一个最能引起 polygons are assumed to be given in a particular order 兴趣的公开的问题是确定两两不相交的非凸的简单 多边形的TPP复杂性” 法,进而按启发式方法解决这个简化了的P 本文3.1节的算法2针对这个问题给出一个复 TSP.但它没有给出这个方法的复杂性分析的证明: 杂性为x(g·O(m的一种近似算法,这里n是给定 作为文献[4]的工作的后续工作,文献[11]证明了一 所有多边形的顶点总数,£是精确度 个进一步简化了的PTSP(即文献[11]只考虑凸多 1.2部件切割问题 边形,且这些多边形按照给定次序访问)是多项式时 在各种各样的加工工业上,例如制衣、制窗、机 间可解的(见图2).如果再加上一个条件:起点是给 械加工等,常常需要从大片的纸、布料玻璃金属上 定的(见图3),那么称他们能解决这个问题,算法的 面切割出很多的部件假如以简单多边形为模型). 复杂性是O(kdog(/)).这里n是平面上所有多 受到这些应用的启发,文献[4提出3种切割模式: 边形的顶点总数,aPCT,i=1,2,,k )连续切割问题:切割工具访问每个对象(例如 简单多边形正好一次.切割刀具可以从对象的边缘 上任意一点开始,但在移动到下一对象前必须切割 完整个对象.因此,那个对象的进入点和离开点必须 是同一点. 2)端点切割问题:进入和退出每个对象的某个 预先规定的边沿点.但可以切割每个对象成为几个 部分.也就是说,它可以重复地访问一个对象 图2说明文献[11]中进一步简化的P-TSP 3)间歇切割问题:这是最一般的情形.每个对象 (假定这里多边形全是凸的) 可以被切割成为几个部分而且进入和离开点没有受 Fig.2 Illustration for the further simplified 到限制. P-TSP in Ref.11]also assuming convex polygons 文献[4]集中考虑每个对象都是一个简单多边 形的连续切割问题.他们称这个问题为模板切割旅 行售货员问题(PTSP).它是著名的旅行售货员问 题(TSP)的推广例 PTSP可进一步推广到广义的TSP (GTSP)).如果每个多边形都退化成一个单一顶 点,那么PTSP就变成TSP,是己知NP困难的 由此可知PTSP也是NP困难的 图3说明文献[3]中的PTSP(假定这里给定起点s) PTSP的困难使得文献[4]添加上一个条件来 Fig.3 Illustration for the P-TSP as considered 考虑这个问题:假定所有多边形都按一个给定的次 in Ref.[3].now also with a given start point s 序访问(见图1),于是基于一种拉格朗日放松方 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
同) ,那么说路径ρ〈p , q〉访问 Pi 于 p i 点 ,此处 i = 1 ,2 , …, k. 无约束 TPP 问题定义如下 : 在平面上如何寻找出一条欧几里德最短路径 ρ〈p , p1 , p2 , …, pk , q〉,使得它按给定次序 ( i = 1 , 2 , …, k) 访问每个多边形 Pi . 假定对于任意 i , j ∈{ 1 , 2 , …, k} , 9 Pi ∩9 Pj = ª,而且每个 Pi 都是凸的 ,文献[3 ]讨论这类特别情 形并且给出复杂性为 O ( knlog ( n/ k) ) 的算法解. 这 里 n 是平面π上所有多边形 Pi 的顶点总数 , i = 1 , 2 , …, k. 根据他们的结果 ,文献[3 ]指出“, 一个最能引起 兴趣的公开的问题是确定两两不相交的非凸的简单 多边形的 TPP 复杂性”. 本文 311 节的算法 2 针对这个问题给出一个复 杂性为κ(ε) ·O( n) 的一种近似算法 ,这里 n 是给定 所有多边形的顶点总数 ,ε是精确度. 112 部件切割问题 在各种各样的加工工业上 ,例如制衣、制窗、机 械加工等 ,常常需要从大片的纸、布料、玻璃、金属上 面切割出很多的部件 (假如以简单多边形为模型) . 受到这些应用的启发 ,文献[4 ]提出 3 种切割模式 : 1) 连续切割问题 :切割工具访问每个对象(例如 简单多边形) 正好一次. 切割刀具可以从对象的边缘 上任意一点开始 ,但在移动到下一对象前必须切割 完整个对象. 因此 ,那个对象的进入点和离开点必须 是同一点. 2) 端点切割问题 :进入和退出每个对象的某个 预先规定的边沿点. 但可以切割每个对象成为几个 部分. 也就是说 ,它可以重复地访问一个对象. 3) 间歇切割问题 :这是最一般的情形. 每个对象 可以被切割成为几个部分而且进入和离开点没有受 到限制. 文献[4 ]集中考虑每个对象都是一个简单多边 形的连续切割问题. 他们称这个问题为模板切割旅 行售货员问题 (P2TSP) . 它是著名的旅行售货员问 题( TSP) 的推广[5 ] . P2TSP 可 进 一 步 推 广 到 广 义 的 TSP ( GTSP) [627 ] . 如果每个多边形都退化成一个单一顶 点 ,那么 P2TSP 就变成 TSP ,是已知 N P 困难的[8 ] . 由此可知 P2TSP 也是 NP 困难的. P2TSP 的困难使得文献[4 ]添加上一个条件来 考虑这个问题 :假定所有多边形都按一个给定的次 序访问 (见图 1) ,于是基于一种拉格朗日放松方 图 1 说明文献[4 ]中简化的 P2TSP(假定这里多边形 按照给定次序访问) Fig11 Illustration for the simplified P2TSP in Ref. [4] where polygons are assumed to be given in a particular order 法[9210 ] ,进而按启发式方法解决这个简化了的 P2 TSP. 但它没有给出这个方法的复杂性分析的证明. 作为文献[ 4 ]的工作的后续工作 ,文献[11 ]证明了一 个进一步简化了的 P2TSP(即文献[ 11 ]只考虑凸多 边形 ,且这些多边形按照给定次序访问) 是多项式时 间可解的(见图 2) . 如果再加上一个条件 :起点是给 定的(见图 3) ,那么称他们能解决这个问题 ,算法的 复杂性是 O( knlog ( n/ k) ) . 这里 n 是平面上所有多 边形的顶点总数 , 9 Pi <π, i = 1 ,2 , …, k. ·24 · 智 能 系 统 学 报 第 3 卷
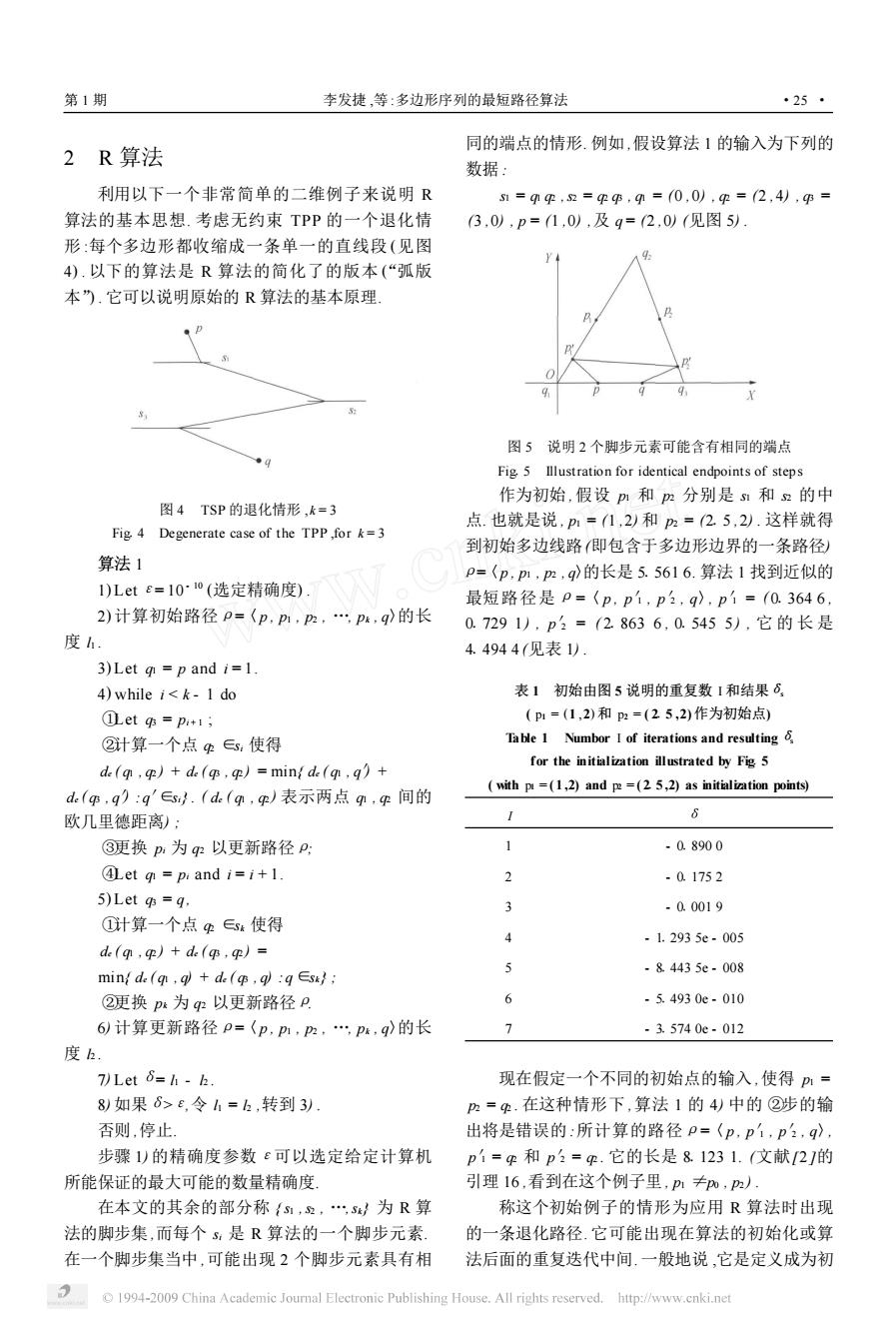
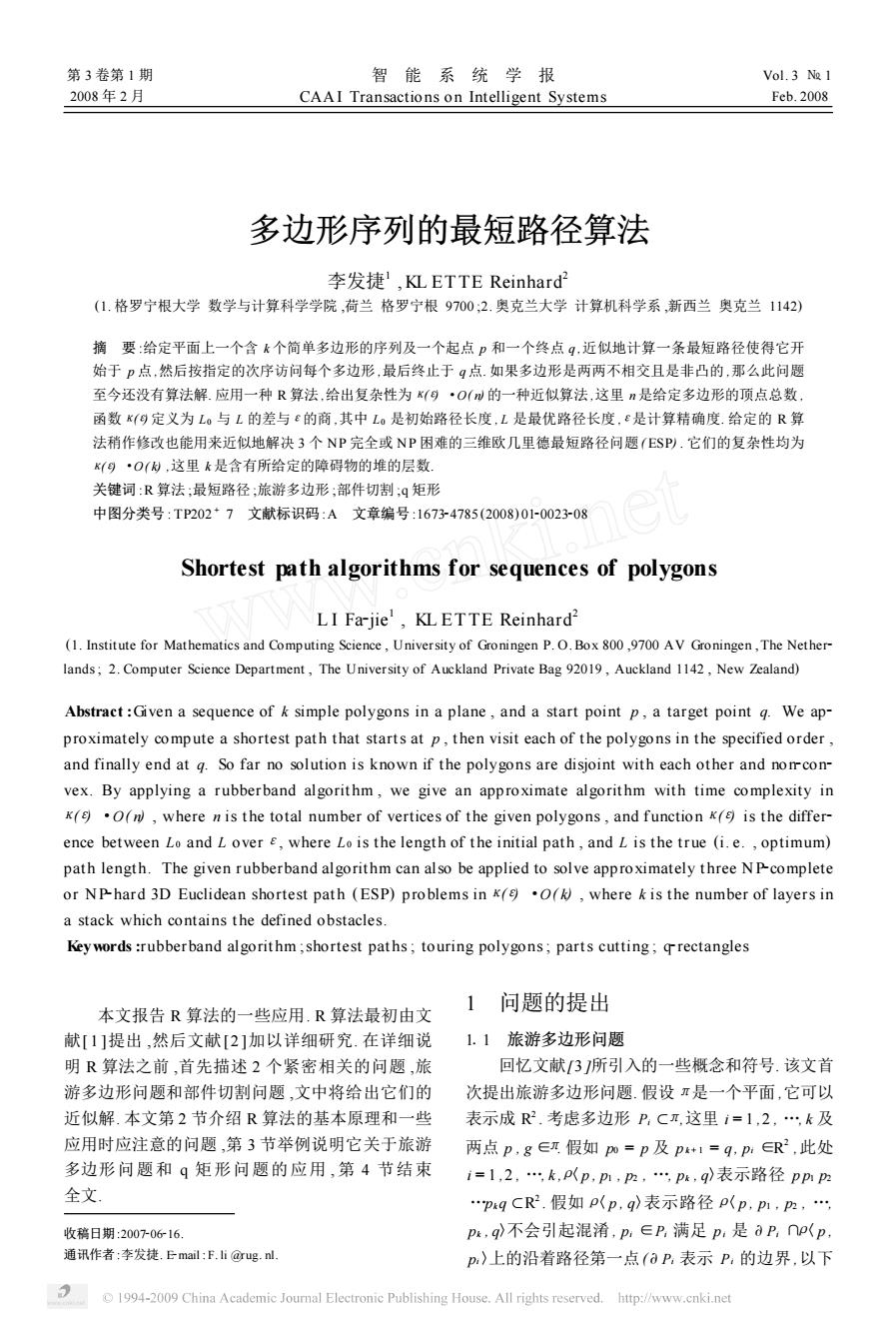
第1期 李发捷,等:多边形序列的最短路径算法 ·25 同的端点的情形.例如,假设算法1的输入为下列的 2 R算法 数据: 利用以下一个非常简单的二维例子来说明R s1=p,2=pp,4=0,0),=(2,4),9= 算法的基本思想.考虑无约束TPP的一个退化情 3,0),p=1,0,及q=2,0(见图5). 形:每个多边形都收缩成一条单一的直线段(见图 4).以下的算法是R算法的简化了的版本(“弧版 本”.它可以说明原始的R算法的基本原理 图5说明2个脚步元素可能含有相同的端点 Fig,5 Illustration for identical endpoints of steps 作为初始,假设pm和m分别是s和”的中 图4TSP的退化情形,k=3 点.也就是说,p1=(1,2)和p2=(2.5,2).这样就得 Fig 4 Degenerate case of the TPP,for k=3 到初始多边线路即包含于多边形边界的一条路径) 算法1 p=〈p,pm,pm,q的长是5.5616.算法1找到近似的 1)Lete=10~o(选定精确度) 最短路径是P=〈p,p1,p2,q〉,p1=(0.3646, 2)计算初始路径p=〈p,p,pm,p,q〉的长 0.7291),p2=(2.8636,0.5455),它的长是 度h. 4.4944(见表1) 3)Let g=p and i=1. 4)while i<k-1 do 表1初始由图5说明的重复数1和结果6, ①etqp=pi+1; (p1=(1,2)和2=(25,2)作为初始点) ②计算一个点∈,使得 Table 1 Numbor I of iterations and resulting for the initialization illustrated by Fig 5 de(q.)+de(.)=min de(q.q)+ with p =(1,2)and pe=(2 5,2)as initialication points) d(p,q):q'∈s.(d(qm,p)表示两点q,间的 欧几里德距离): ③更换p为gp以更新路径P: 1 -0.8900 ④etg=p:andi=i+l. -0.1752 5)Let os=q. 3 .0.0019 ①计算一个点∈:使得 -1.2935e-005 d。(p,p)+d(g,p)= 5 -84435e-008 mind de(q,q de(eq):qEs ②更换p:为q2以更新路径P 6 -5.4930e-010 6计算更新路径p=〈p,p,p2,p,q〉的长 7 -3.5740e-012 度h. 7)Let 8=h-k. 现在假定一个不同的初始点的输入,使得p= 8)如果6>£,令h=h,转到3 p=.在这种情形下,算法1的4)中的②步的输 否则,停止 出将是错误的:所计算的路径p=〈p,p,p2,q〉, 步骤1)的精确度参数ε可以选定给定计算机 p1=和p2=.它的长是8.1231.(文献[2J的 所能保证的最大可能的数量精确度, 引理16,看到在这个例子里,p1≠m,p) 在本文的其余的部分称{,2,sx为R算 称这个初始例子的情形为应用R算法时出现 法的脚步集,而每个5是R算法的一个脚步元素 的一条退化路径.它可能出现在算法的初始化或算 在一个脚步集当中,可能出现2个脚步元素具有相 法后面的重复迭代中间.一般地说,它是定义成为初 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
2 R 算法 利用以下一个非常简单的二维例子来说明 R 算法的基本思想. 考虑无约束 TPP 的一个退化情 形 :每个多边形都收缩成一条单一的直线段 (见图 4) . 以下的算法是 R 算法的简化了的版本 “( 弧版 本”) . 它可以说明原始的 R 算法的基本原理. 图 4 TSP 的退化情形 , k = 3 Fig14 Degenerate case of the TPP ,for k = 3 算法 1 1) Letε= 10 - 10 (选定精确度) . 2) 计算初始路径ρ=〈p , p1 , p2 , …, pk , q〉的长 度 l1 . 3) Let q1 = p and i = 1. 4) while i < k - 1 do ①Let q3 = pi + 1 ; ②计算一个点 q2 ∈si 使得 de ( q1 , q2 ) + de ( q3 , q2 ) = min{ de ( q1 , q′) + de ( q3 , q′) :q′∈si} . ( de ( q1 , q2 ) 表示两点 q1 , q2 间的 欧几里德距离) ; ③更换 pi 为 q2 以更新路径ρ; ④Let q1 = pi and i = i + 1. 5) Let q3 = q , ①计算一个点 q2 ∈sk 使得 de ( q1 , q2 ) + de ( q3 , q2 ) = min{ de ( q1 , q) + de ( q3 , q) :q ∈sk } ; ②更换 pk 为 q2 以更新路径ρ. 6) 计算更新路径ρ=〈p , p1 , p2 , …, pk , q〉的长 度 l2 . 7) Letδ= l1 - l2 . 8) 如果δ>ε,令 l1 = l2 ,转到 3) . 否则 ,停止. 步骤 1) 的精确度参数ε可以选定给定计算机 所能保证的最大可能的数量精确度. 在本文的其余的部分称 { s1 ,s2 , …,sk } 为 R 算 法的脚步集 ,而每个 si 是 R 算法的一个脚步元素. 在一个脚步集当中 ,可能出现 2 个脚步元素具有相 同的端点的情形. 例如 ,假设算法 1 的输入为下列的 数据 : s1 = q1 q2 ,s2 = q2 q3 , q1 = (0 ,0) , q2 = (2 , 4) , q3 = (3 ,0) , p = (1 ,0) ,及 q = (2 ,0) (见图 5) . 图 5 说明 2 个脚步元素可能含有相同的端点 Fig15 Illustration for identical endpoints of step s 作为初始 ,假设 p1 和 p2 分别是 s1 和 s2 的中 点. 也就是说 , p1 = (1 ,2) 和 p2 = (215 ,2) . 这样就得 到初始多边线路(即包含于多边形边界的一条路径) ρ=〈p , p1 , p2 , q〉的长是 51561 6. 算法 1 找到近似的 最短路径是ρ=〈 p , p′1 , p′2 , q〉, p′1 = ( 01364 6 , 01729 1 ) , p′2 = ( 21863 6 , 01545 5 ) , 它 的 长 是 41494 4 (见表 1) . 表 1 初始由图 5 说明的重复数 I 和结果δs ( p1 = (1 ,2) 和 p2 = ( 215 ,2)作为初始点) Table 1 Numbor I of iterations and resultingδs for the initialization illustrated by Fig15 ( with p1 = ( 1 ,2) and p2 = ( 215 ,2) as initialization points) I δ 1 - 01890 0 2 - 01175 2 3 - 01001 9 4 - 11293 5e - 005 5 - 81443 5e - 008 6 - 51493 0e - 010 7 - 31574 0e - 012 现在假定一个不同的初始点的输入 ,使得 p1 = p2 = q2 . 在这种情形下 ,算法 1 的 4) 中的 ②步的输 出将是错误的 :所计算的路径ρ=〈p , p′1 , p′2 , q〉, p′1 = q2 和 p′2 = q2 . 它的长是 81123 1. (文献[2 ]的 引理 16 ,看到在这个例子里 , p1 ≠p0 , p2 ) . 称这个初始例子的情形为应用 R 算法时出现 的一条退化路径. 它可能出现在算法的初始化或算 法后面的重复迭代中间. 一般地说 ,它是定义成为初 第 1 期 李发捷 ,等 :多边形序列的最短路径算法 ·25 ·
·26· 智能系统学报 第3卷 始的或更新的多边线路出现至少2个线段含有一个 106;x1=2-6,M=2x1;x2=2+8,2= 相同的顶点.这样的退化情形造成算法1的4)中的 -4(x2-3);pm1=(x1,n),p=(x2,2).此外,假定 ②步失效」 精确度改为e=1X101oo」 每一条退化路可以近似地处理如下:令历≠ 初始的多边线路p=〈p,p,m,g〉的长等于 .为此,从线段和2中切除掉一段充分小的线 8.1231.算法1可计算出最短路径p=〈p,p1,p?, 段.以下的例子说明对于假定的输入数据如何处理 q,p1=(0.3646,0.7291),p2=(2.8636, 这样的退化情形 0.5455).它的长等于4.4944(见表2). 修改x1、2、h、2的初始值为6=2.221× 表2初始由图5说明的重复数1和结果6,(p=(2.6',2(2·6)和 2=(2+6”,-4(2+6)-3)作为初始点,6-2221e-16. Table 2 Number I of iterations and resulting ,for the step set shown in Fig.5(p=(2-6,2(2)and p2 =(2+6,-4((2+6)-3))as initialization points and 6/=2 22le-16) 6 6 -5.4831e-007 7 -1.2313 13 .7.0319e-010 g 8.8818e-016 2 -6.2779e-006 8 -2.0286 14 -45732e.012 20 8.8818e-016 3 -7.7817e-005 9 -0.2104 -3.0198e-14 21 8.8818e-016 4 -9.6471e.004 10 -0.0024 16 -8.8818e-016 22 8.8818e-016 -0.0119 11 -1.6550e-005 8.8818e-016 2 -8.8818e-016 -0.1430 12 -1.0809e-007 18 -8.8818e-016 24 0 当然,如果让精确度£=1X10~°,那么算法将 要在较少重复后更快地终止.在实验环境为Matlab 7.04,奔腾4个人电脑的情况下,如果改变6的值为 8=2.22X1016,那么得到与初始点pm=pm=p同 样的错误结果.这是因为计算机不能识别x1和x1士 2.221016之间的差别.然而,对于实际应用,数值 图6说明算法2的4)②和5②的初始化 8=2.221×10~16在这种特别的算法实现环境下, Fig 6 lllustration for the initialization for steps 应当是足够小或者说足够精确了. 4)②and5)②in algorithm2 4)while i<k-1 do 3应用 ①etp=pi+1; 利用R算法的特别版本(变形)来近似地解决2 ②计算一个点∈0P(参见文献121中引理 个计算问题 53的证明)使得d.(q,)+d.(,)=min{de 3.1旅游多边形问题 (m,g+d.(,q:q∈P}(其中aP,是多边形P 本文这一节的主要算法给出本文1.1节提到的 的边界): 公开问题的近似算法解.它是算法1经修改而获得的 ③更换p,为q2以更新路径P: (2个算法的差别仅在于4)和5) ④etqm=p,和i=i+1. 算法2 5)Let gs=q: 1)Letc=10~io(选定精确度) ①计算一个点∈aP使得d.(,)+ 2)计算初始路径p=〈p,pm,pm,,p,q〉的长 de(s q)=mint de(n,q+d.(s.q :qep 度h. ②更换p:为q以更新路径P. 3)Let g=p and i=1. 6)计算更新路径p=〈p,pP,p,p,q的长 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
始的或更新的多边线路出现至少 2 个线段含有一个 相同的顶点. 这样的退化情形造成算法 1 的 4) 中的 ②步失效. 每一条退化路可以近似地处理如下 :令 p2 ≠ q2 . 为此 ,从线段 s1 和 s2 中切除掉一段充分小的线 段. 以下的例子说明对于假定的输入数据如何处理 这样的退化情形. 修改 x1 、x2 、y1 、y2 的初始值为δ′= 21221 × 10 - 16 ; x1 = 2 - δ′, y1 = 2 x1 ; x2 = 2 + δ′, y2 = - 4 ( x2 - 3) ; p1 = ( x1 , y1 ) , p2 = ( x2 , y2 ) . 此外 ,假定 精确度改为ε= 1 ×10 - 100 . 初始的多边线路ρ=〈 p , p1 , p2 , q〉的长等于 81123 1. 算法 1 可计算出最短路径ρ=〈p , p′1 , p′2 , q〉, p′1 = ( 01364 6 , 01729 1 ) , p′2 = ( 21863 6 , 01545 5) . 它的长等于 41494 4 (见表 2) . 表 2 初始由图 5 说明的重复数 I 和结果δs( p1 = (2 - δ′,2 (2 - δ′) ) 和 p2 = (2 +δ′, - 4 ( (2 +δ′) - 3) )作为初始点 ,δ′= 21221e - 16) . Table 2 Number I of iterations and resultingδs ,for the step set shown in Fig. 5 ( p1 = ( 2 - δ′,2 (2 - δ′) ) and p2 = (2 +δ′, - 4 ( (2 +δ′) - 3) ) as initialization points andδ′= 21221e - 16) I δ I δ I δ I δ 1 - 51483 1e - 007 7 - 11231 3 13 - 71031 9e - 010 19 81881 8e - 016 2 - 61277 9e - 006 8 - 210286 14 - 41573 2e - 012 20 81881 8e - 016 3 - 71781 7e - 005 9 - 01210 4 15 - 31019 8e - 14 21 81881 8e - 016 4 - 91647 1e - 004 10 - 01002 4 16 - 81881 8e - 016 22 81881 8e - 016 5 - 01011 9 11 - 11655 0e - 005 17 81881 8e - 016 23 - 81881 8e - 016 6 - 01143 0 12 - 11080 9e - 007 18 - 81881 8e - 016 24 0 当然 ,如果让精确度ε= 1 ×10 - 10 ,那么算法将 要在较少重复后更快地终止. 在实验环境为 Matlab 7104 ,奔腾 4 个人电脑的情况下 ,如果改变δ′的值为 δ′= 2122 ×10 - 16 ,那么得到与初始点 p1 = p2 = q2 同 样的错误结果. 这是因为计算机不能识别 x1 和 x1 ± 2122 ×10 - 16之间的差别. 然而 ,对于实际应用 ,数值 δ′= 21221 ×10 - 16 在这种特别的算法实现环境下 , 应当是足够小或者说足够精确了. 3 应 用 利用 R 算法的特别版本(变形) 来近似地解决 2 个计算问题. 311 旅游多边形问题 本文这一节的主要算法给出本文 111 节提到的 公开问题的近似算法解.它是算法 1 经修改而获得的 (2 个算法的差别仅在于 4)和 5)) . 算法 2 1) Letε= 10 - 10 (选定精确度) . 2) 计算初始路径ρ=〈p , p1 , p2 , …, pk , q〉的长 度 l1 . 3) Let q1 = p and i = 1. 图 6 说明算法 2 的 4) ②和 5 ②的初始化 Fig16 Illustration for the initialization for step s 4) ②and 5) ②in algorithm 2 4) while i < k - 1 do ①Let q2 = pi + 1 ; ②计算一个点 q2 ∈9 Pi (参见文献[12 ]中引理 53 的证明) 使得 de ( q1 , q2 ) + de ( q3 , q2 ) = min { de ( q1 , q) + de ( q3 , q) : q ∈9 Pi} (其中 9 Pi 是多边形 Pi 的边界) ; ③更换 pi 为 q2 以更新路径ρ; ④Let q1 = pi 和 i = i + 1. 5) Let q3 = q; ①计算一个点 q2 ∈9 Pk 使得 de ( q1 , q2 ) + de ( q3 , q2 ) = min{ de { q1 , q} + de ( q3 , q) :q ∈9 Pk } ; ②更换 pk 为 q2 以更新路径ρ. 6) 计算更新路径ρ=〈p , p1 , p2 , …, pk , q〉的长 ·26 · 智 能 系 统 学 报 第 3 卷
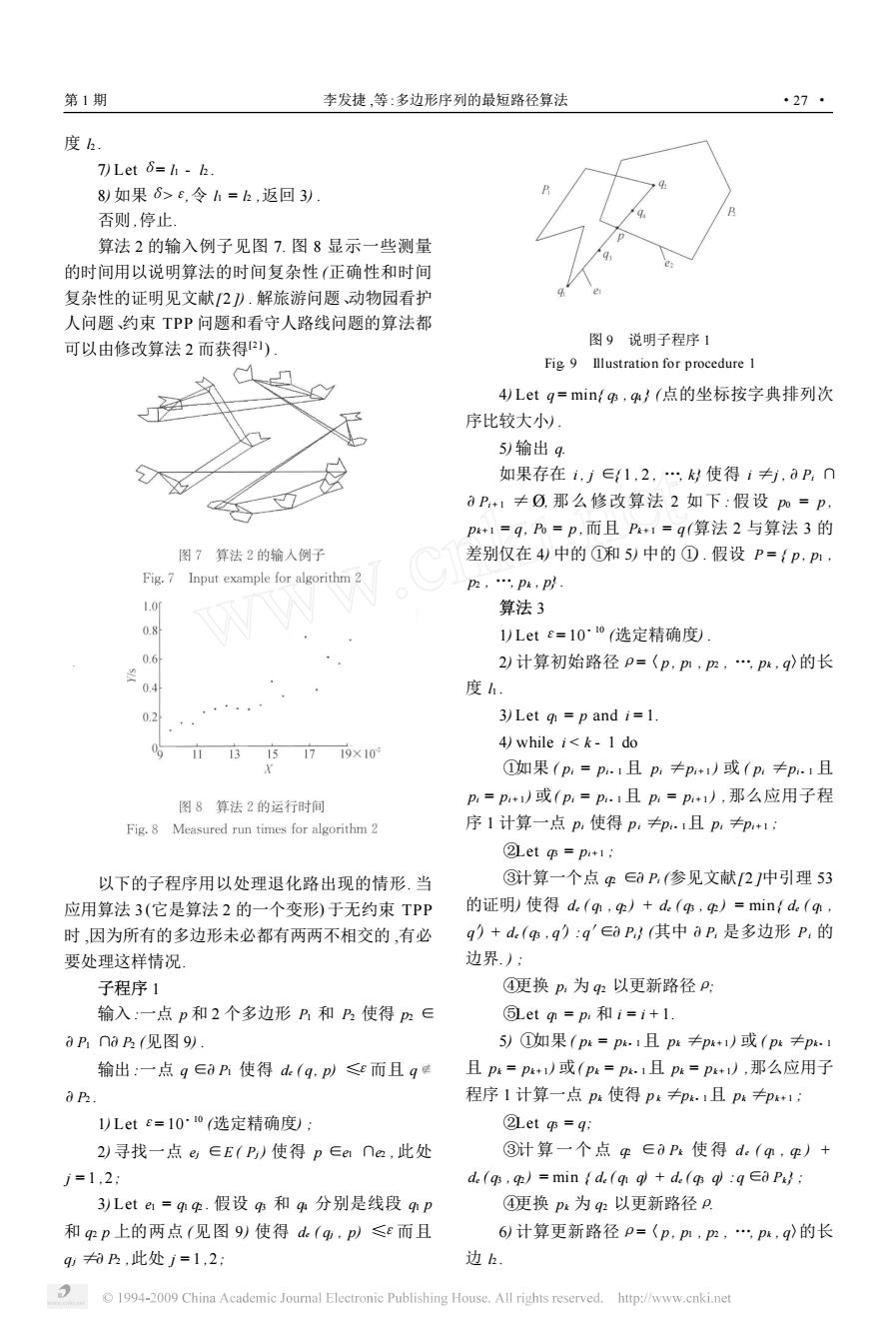
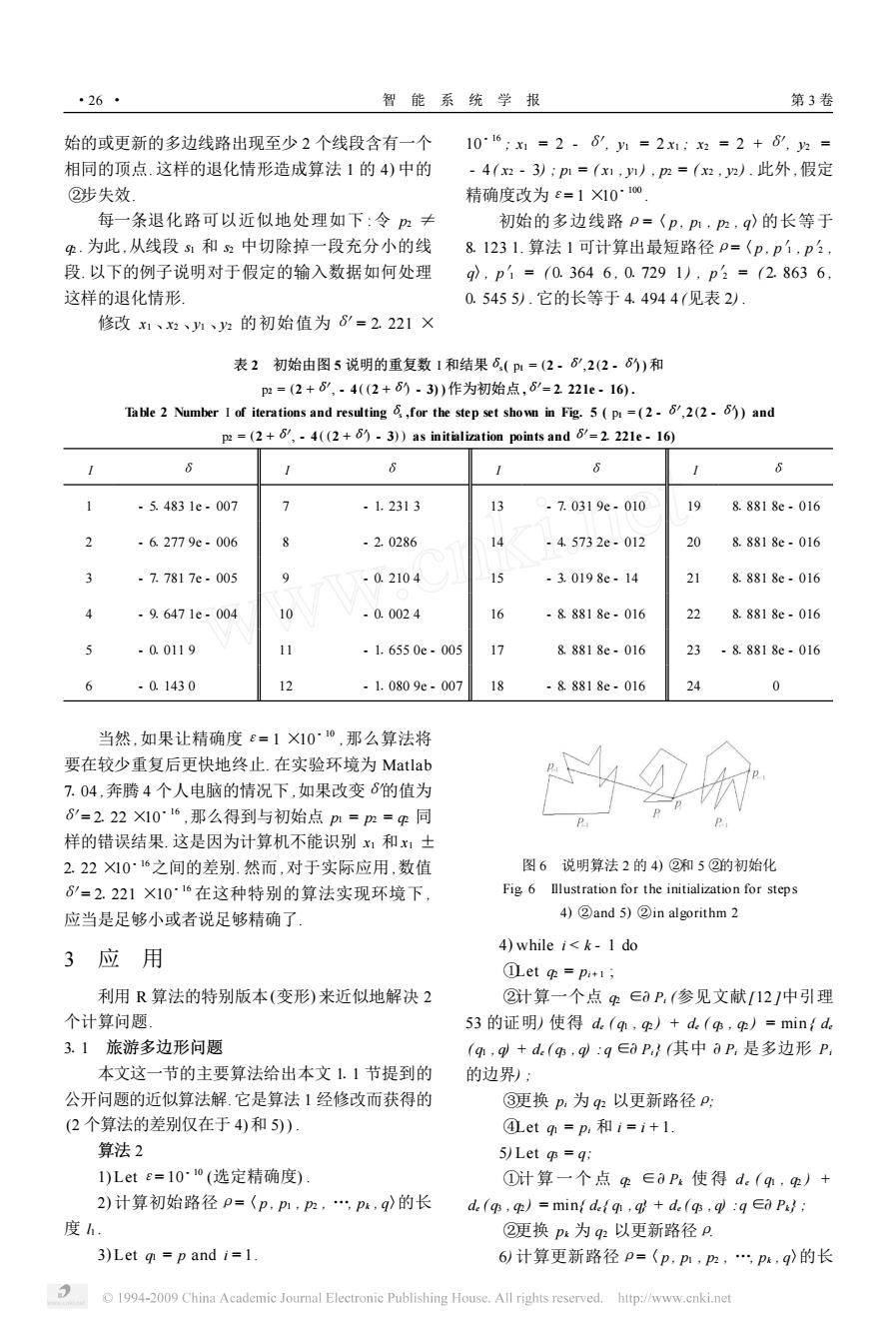
第1期 李发捷,等:多边形序列的最短路径算法 ·27· 度h 7)Let 6=h-k. 8如果6>e,令h=b,返回3). 否则,停止 算法2的输入例子见图7.图8显示一些测量 的时间用以说明算法的时间复杂性(正确性和时间 复杂性的证明见文献[2).解旅游问题动物园看护 人问题约束TPP问题和看守人路线问题的算法都 可以由修改算法2而获得) 图9说明子程序1 Fig 9 Illustration for procedure 1 4)Letq=minf,4}(点的坐标按字典排列次 序比较大小) 5)输出q 如果存在i,j∈1,2,…k使得i≠,0P,n aP+1≠O,那么修改算法2如下:假设pm=p, p+I=q,P6=p,而且P+1=q(算法2与算法3的 图7算法2的输入例子 差别仅在4)中的①和5)中的①.假设P=fp,p1。 Fig.7 Input example for algorithm 2 ph,pk,p时 .0 算法3 0.8 1)Letc=10~0(选定精确度) 0.6 2)计算初始路径p=〈p,pm,pm,p,q〉的长 0.4 度h. 0.2 3)Let g=p and i=1. 4)while i<k-1 do 13151719×10 X ①如果(p:=p.1且p,≠p+)或(p,≠p.1且 图8算法2的运行时间 p,=P+或(p:=P.1且p=p+1),那么应用子程 Fig.8 Measured run times for algorithm 2 序1计算一点p,使得p:卡p.且p,≠p+1 ②Letp=pi+1: 以下的子程序用以处理退化路出现的情形.当 ③计算一个点∈aP(参见文献21中引理53 应用算法3(它是算法2的一个变形)于无约束TPP 的证明)使得d.(,)+d.(,)=min{d(, 时,因为所有的多边形未必都有两两不相交的,有必 q)+d.(,9):q∈8P}其中a卫是多边形P,的 要处理这样情况 边界.): 子程序1 ④更换p,为q2以更新路径P: 输入:一点p和2个多边形B和P使得p2∈ ⑤etqm=p:和i=i+1. aP∩8B(见图9). 5)①如果(pk=pk.1且pk卡pk+1)或(p:卡pk.1 输出:一点q∈aP使得d.(g,p≤e而且q 且pk=pk+)或(P=pk.1且p:=pk+),那么应用子 0P2 程序1计算一点P:使得pk卡p.1且p:≠pk+1: 1)Let£=10~0(选定精确度); ②etp=q 2)寻找一点e∈EP)使得p∈e1∩a,此处 ③计算一个点∈P:使得d:(,p)+ j=1,2: d.(.)=min d.(aq)d.(gs g):qp 3)Let er=q.假设p和年分别是线段mp ④更换p:为92以更新路径P 和qpp上的两点(见图9)使得d。(g,p)≤e而且 6)计算更新路径p=〈p,pm,pm,pk,q〉的长 9乃,此处j=1,2; 边h. 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
度 l2 . 7) Letδ= l1 - l2 . 8) 如果δ>ε,令 l1 = l2 ,返回 3) . 否则 ,停止. 算法 2 的输入例子见图 7. 图 8 显示一些测量 的时间用以说明算法的时间复杂性 (正确性和时间 复杂性的证明见文献[2 ]) . 解旅游问题、动物园看护 人问题、约束 TPP 问题和看守人路线问题的算法都 可以由修改算法 2 而获得[2 ] ) . 以下的子程序用以处理退化路出现的情形. 当 应用算法 3 (它是算法 2 的一个变形) 于无约束 TPP 时 ,因为所有的多边形未必都有两两不相交的 ,有必 要处理这样情况. 子程序 1 输入 :一点 p 和 2 个多边形 P1 和 P2 使得 p2 ∈ 9 P1 ∩9 P2 (见图 9) . 输出 :一点 q ∈9 P1 使得 de ( q , p) ≤ε而且 q 9 P2 . 1) Letε= 10 - 10 (选定精确度) ; 2) 寻找一点 ej ∈E ( Pj ) 使得 p ∈e1 ∩e2 , 此处 j = 1 ,2 ; 3) Let e1 = q1 q2 . 假设 q3 和 q4 分别是线段 q1 p 和 q2 p 上的两点 (见图 9) 使得 de ( qj , p) ≤ε而且 qj ≠9 P2 ,此处 j = 1 ,2 ; 图 9 说明子程序 1 Fig19 Illustration for procedure 1 4) Let q = min{ q3 , q4 } (点的坐标按字典排列次 序比较大小) . 5) 输出 q. 如果存在 i , j ∈{ 1 , 2 , …, k} 使得 i ≠j , 9 Pi ∩ 9 Pi + 1 ≠ ª, 那么修改算法 2 如下 : 假设 p0 = p , pk + 1 = q , P0 = p ,而且 Pk + 1 = q (算法 2 与算法 3 的 差别仅在 4) 中的 ①和 5) 中的 ①) . 假设 P = { p , p1 , p2 , …, pk , p} . 算法 3 1) Letε= 10 - 10 (选定精确度) . 2) 计算初始路径ρ=〈p , p1 , p2 , …, pk , q〉的长 度 l1 . 3) Let q1 = p and i = 1. 4) while i < k - 1 do ①如果 ( pi = pi - 1 且 pi ≠pi + 1 ) 或 ( pi ≠pi - 1 且 pi = pi + 1 ) 或( pi = pi - 1 且 pi = pi + 1 ) ,那么应用子程 序 1 计算一点 pi 使得 p i ≠pi - 1且 pi ≠pi + 1 ; ②Let q3 = pi + 1 ; ③计算一个点 q2 ∈9 Pi (参见文献[2 ]中引理 53 的证明) 使得 de ( q1 , q2 ) + de ( q3 , q2 ) = min{ de ( q1 , q′) + de ( q3 , q′) :q′∈9 Pi} (其中 9 Pi 是多边形 Pi 的 边界. ) ; ④更换 pi 为 q2 以更新路径ρ; ⑤Let q1 = pi 和 i = i + 1. 5) ①如果 ( pk = pk - 1 且 pk ≠pk + 1 ) 或 ( pk ≠pk - 1 且 pk = pk + 1 ) 或( pk = pk - 1且 pk = pk + 1 ) ,那么应用子 程序 1 计算一点 pk 使得 p k ≠pk - 1且 pk ≠pk + 1 ; ②Let q3 = q; ③计算一个点 q2 ∈9 Pk 使得 de ( q1 , q2 ) + de ( q3 , q2 ) = min { de ( q1 q) + de ( q3 q) :q ∈9 Pk } ; ④更换 pk 为 q2 以更新路径ρ. 6) 计算更新路径ρ=〈p , p1 , p2 , …, pk , q〉的长 边 l2 . 第 1 期 李发捷 ,等 :多边形序列的最短路径算法 ·27 ·