扩展应用 986 电机 电机 电机 电机 控制器 控制器 控制器 控制器 therCAT线 机器人左臂 机器人右臂 Beckoff 中控端 VUI遥操作端 路由器 其余遥 操作端 项目中的UI系统已成功运行在某机器人预研项目的遥操 作端。图为VUT控制空间机器人实验环境图。 2019-12-9 20
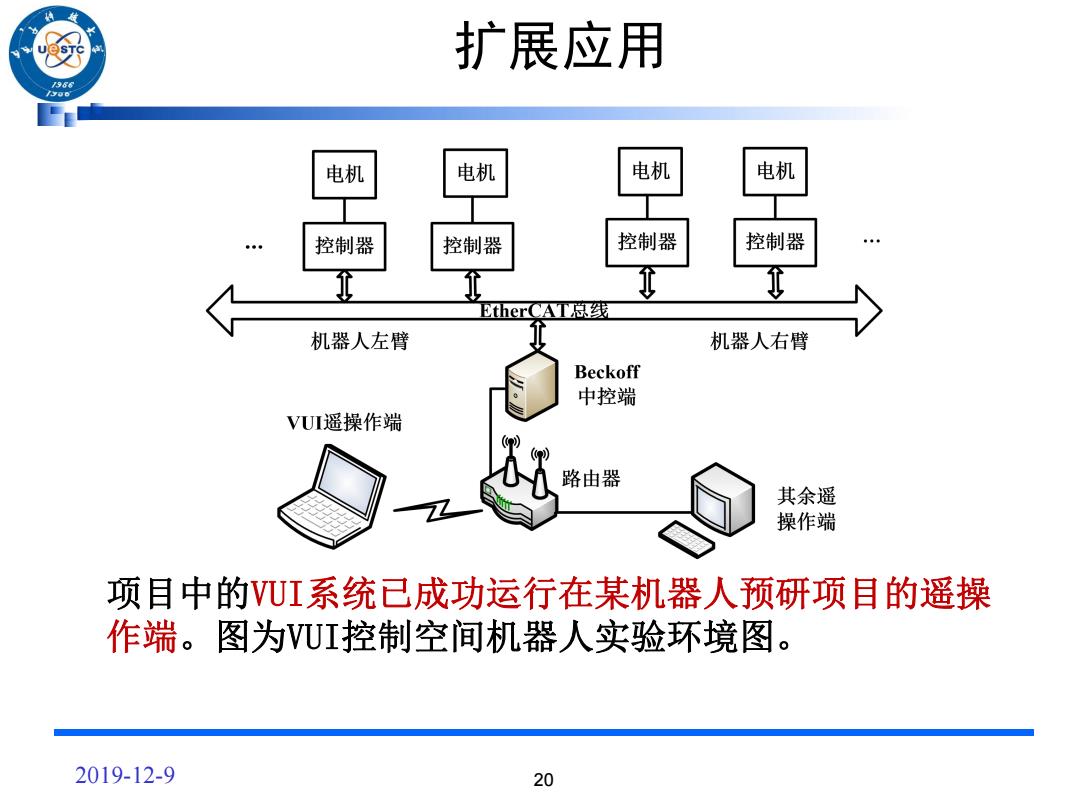
扩展应用 2019-12-9 20 Ø 项目中的VUI系统已成功运行在某机器人预研项目的遥操 作端。图为VUI控制空间机器人实验环境图
安静环境下应用试验 986 语音指令 测试次数 正确次数 正确率 左/右手n关节 50 44 88% 正X度旋转 50 41 82% 负X度旋转 50 38 76% 时间T秒 50 42 84% 向上(前、左等等) 50 40 80% 移动S厘米 VUI的命令:“左/右手n关节”,“正X度旋转”,“负X度 旋转”,“时间T秒”,“向上/下/左/右/前/后移动S厘米” 等,其中n取值为1-7,X取值为-180.0至+180.0,T取值为 0-100.0,S取值为0-100.0,X、T与S精度均为0.1。 2019-12-9 21
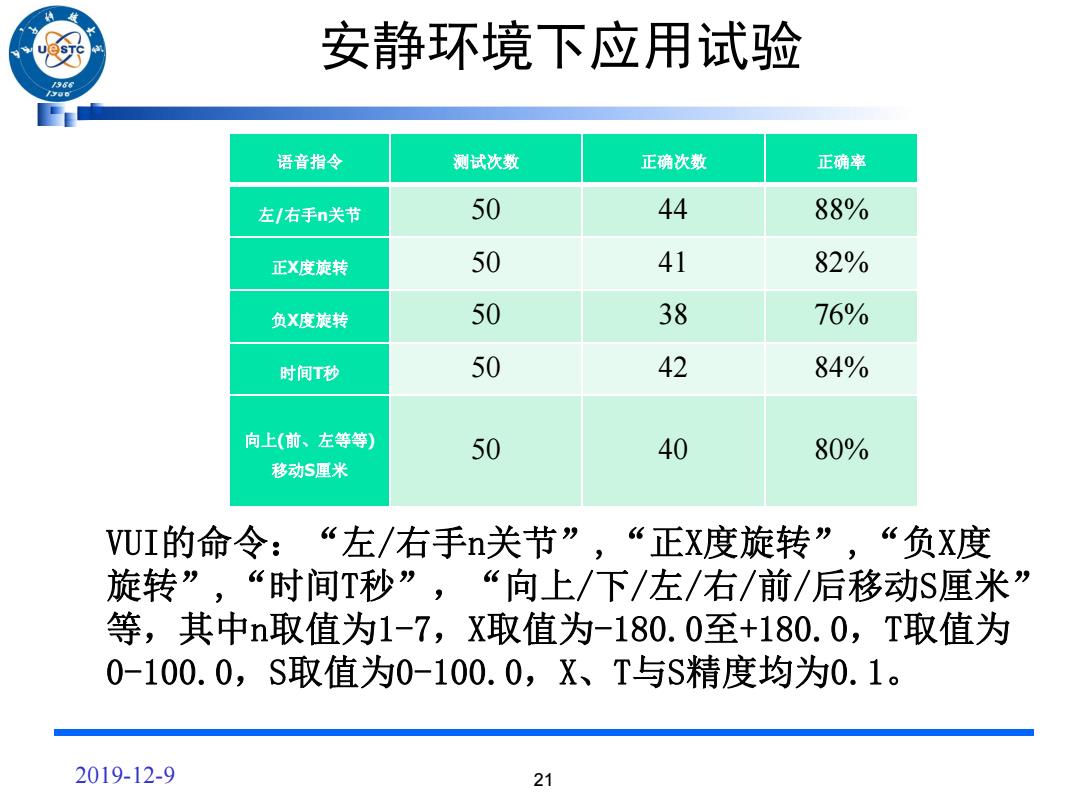
安静环境下应用试验 2019-12-9 21 Ø VUI的命令: “左/右手n关节” , “正X度旋转” , “负X度 旋转” , “时间T秒” , “向上/下/左/右/前/后移动S厘米” 等,其中n取值为1-7,X取值为-180.0至+180.0,T取值为 0-100.0,S取值为0-100.0,X、T与S精度均为0.1。 语音指令 测试次数 正确次数 正确率 左/右手n关节 50 44 88% 正X度旋转 50 41 82% 负X度旋转 50 38 76% 时间T秒 50 42 84% 向上(前、左等等) 移动S厘米 50 40 80%
人声环境下应用试验 986 语音指令 测试次数 正确次数 正确率 与安静环境下正确率比较 左/右手n关节 50 39 78% -10% 正X度旋转 50 35 70% -12% 负X度旋转 50 36 72% -4% 时间T秒 50 41 82% -2% 向上(前、左等 50 37 74% -6% 等)移动S厘米 实验设定在人声嘈杂的环境下,周围环境噪声为一般的人 声,约为60分贝左右。 试验结果表明,在同频段的人声干扰下VUI系统的平均识 别率仅下降约6%左右,说明系统具有良好的抗噪性能。 2019-12-9 22
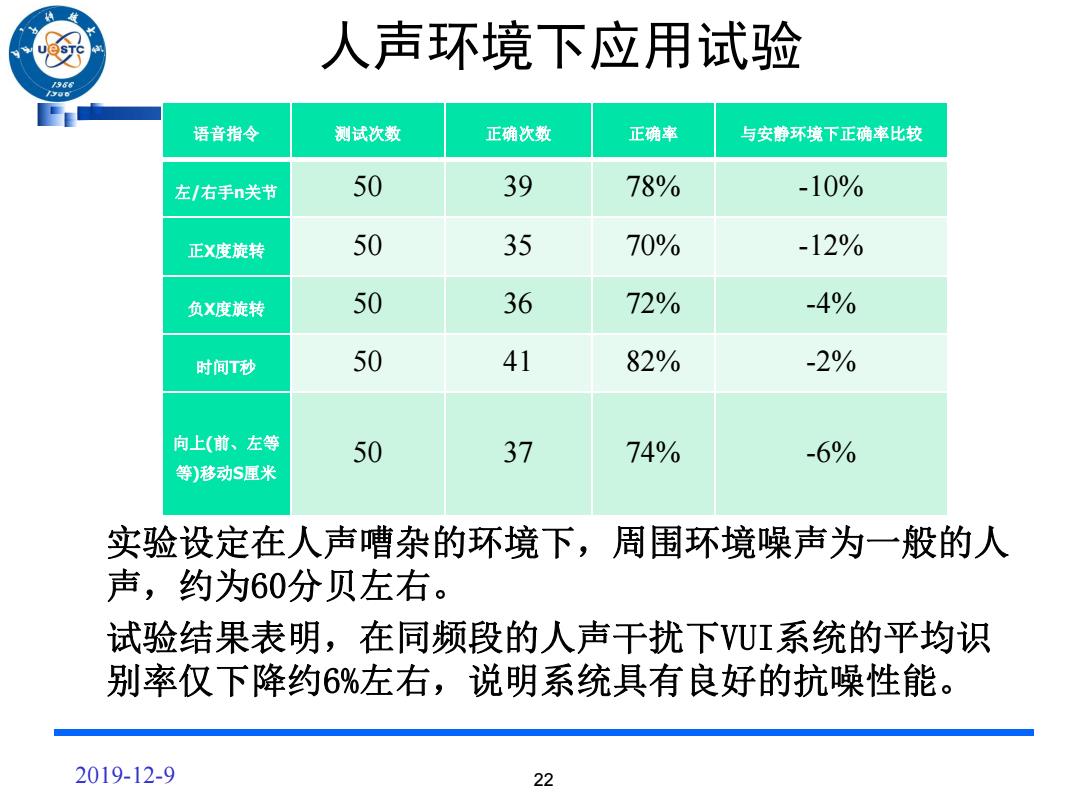
人声环境下应用试验 2019-12-9 22 Ø 实验设定在人声嘈杂的环境下,周围环境噪声为一般的人 声,约为60分贝左右。 Ø 试验结果表明,在同频段的人声干扰下VUI系统的平均识 别率仅下降约6%左右,说明系统具有良好的抗噪性能。 语音指令 测试次数 正确次数 正确率 与安静环境下正确率比较 左/右手n关节 50 39 78% -10% 正X度旋转 50 35 70% -12% 负X度旋转 50 36 72% -4% 时间T秒 50 41 82% -2% 向上(前、左等 等)移动S厘米 50 37 74% -6%
呀 986 2.基于多普勒效应的 自然人机交互系统 2019-12-9 23
2019-12-9 23 2. 基于多普勒效应的 自然人机交互系统
自然人机交互方式 966 1.基于MEMS传感器(例如加速度传感器、陀螺仪传感器等)的 人体姿态人机交互系统,可以根据操作者的手部动作姿态完成 人机交互;但需要在人体手臂上捆绑或穿戴传感器。 ■2.基于视觉的人机交互,例如微软公司的Kinect体感系统和较新 的Leap Motion.系统,使用摄像头来识别人体姿态。这种基于视 觉的人机交互对光线环境的依赖度很高,当人体周围的光线较 暗时就不容易准确识别人体姿态。 基于视觉的人机交互系统也限制了操作者必须位于摄像头的可 视范围内,具有区域局限性。 这些人机交互系统都不具备自然人机交互技术包含的“以人为 本”,“人机和谐”的特点
自然人机交互方式 n 1.基于MEMS传感器(例如加速度传感器、陀螺仪传感器等)的 人体姿态人机交互系统,可以根据操作者的手部动作姿态完成 人机交互;但需要在人体手臂上捆绑或穿戴传感器。 n 2.基于视觉的人机交互,例如微软公司的Kinect体感系统和较新 的Leap Motion系统,使用摄像头来识别人体姿态。这种基于视 觉的人机交互对光线环境的依赖度很高,当人体周围的光线较 暗时就不容易准确识别人体姿态。 n 基于视觉的人机交互系统也限制了操作者必须位于摄像头的可 视范围内,具有区域局限性。 n 这些人机交互系统都不具备自然人机交互技术包含的“以人为 本” , “人机和谐”的特点