敬控技术及编要 第三章数控机床的进给伺服系统 适用专业:机设
第三章 数控机床的进给伺服系统 适用专业:机设
第三章数控机床的进给同服系统 )第一节概述 第二节步进同服驱动控制 →第三节直流同服驱动控制 )第四节交流同服驱动控制 第五节典型同服系统 第四节数控机床的进给传动部件 主页 目录 上一页 下一页 后退 退出
第一节 概述 第三章 数控机床的进给伺服系统 第二节 步进伺服驱动控制 第五节 典型伺服系统 第四节 数控机床的进给传动部件 第三节 直流伺服驱动控制 第四节 交流伺服驱动控制
第一节概述 数控机床对同服系统的要求 1.调速范审要莞 2.精度要肃 3.响应要快 4.低速大蒹矩 5.稳定性裹好,可靠性要高。 同服驱动系统的分类 进给驱动系统 开环系统 用途和功能 主轴驱动系统 控制原理 闭环系统 半闭环系统 电液伺服系统 动作原理 直流伺服驱动系统 电气驱动系统 交流伺服驱动系统 主页 目录 上一页 下一页 后退 退出
第一节 概述 1.调速范围要宽 2.精度要高 3.响应要快 4.低速大转矩 5.稳定性要好,可靠性要高。 进给驱动系统 用途和功能 主轴驱动系统 电液伺服系统 动作原理 直流伺服驱动系统 电气驱动系统 交流伺服驱动系统 开环系统 控制原理 半闭环系统 闭环系统 二.伺服驱动系统的分类 一.数控机床对伺服系统的要求
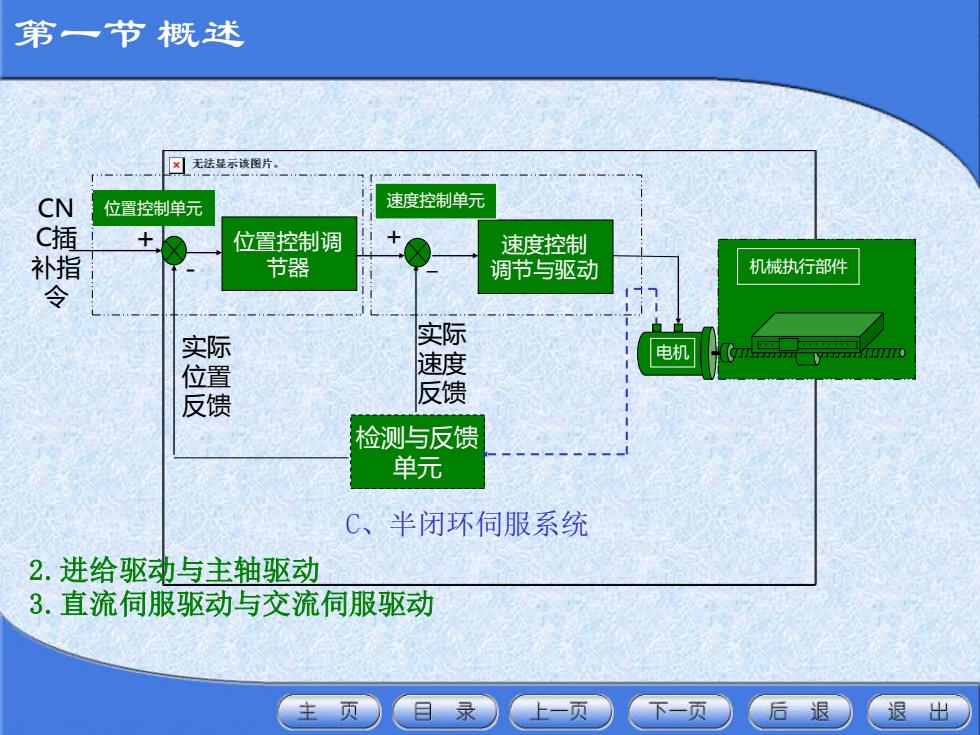
第一节慨述 ☒无法显示该图片 CN 位置控制单元 速度控制单元 C插 + 位置控制调 速度控制 补指 节器 调节与驱动 机械执行部件 117 实际 实际 速度 电机 位置 反馈 反馈 检测与反馈 单元 C、半闭环伺服系统 2.进给驱动与主轴驱动 3.直流伺服驱动与交流伺服驱动 主页。 目录 上一页 下一页 后退 退出
第一节 概述 2.进给驱动与主轴驱动 3.直流伺服驱动与交流伺服驱动 + 位置控制调 + 节器 速度控制 调节与驱动 检测与反馈 单元 位置控制单元 速度控制单元 - - 电机 机械执行部件 CN C插 补指 令 实际 位置 反馈 实际 速度 反馈 C、半闭环伺服系统

第二节步进同服驱动控制 步进电机 ☒冈无法显示该图片, 1.步进电机的结构和工作原理 绕组 定子铁心 2.步进电机的主要特性 1).步距角和静态步距误差 转子铁 步距角指步进电机定子绕组 通电状态每改变一次,转子转过 的角度。 步距角计算式为: 360P mzk m一定子相数;z一转子齿数;k一拍数与相数的比例系数 页 目录 上一页 一页 后退 退出
第二节 步进伺服驱动控制 1.步进电机的结构和工作原理 2.步进电机的主要特性 1).步距角和静态步距误差 步距角指步进电机定子绕组 通电状态每改变一次,转子转过 的角度。 步距角计算式为: 0 360 mzk a = m—定子相数;z—转子齿数;k—拍数与相数的比例系数 一.步进电机