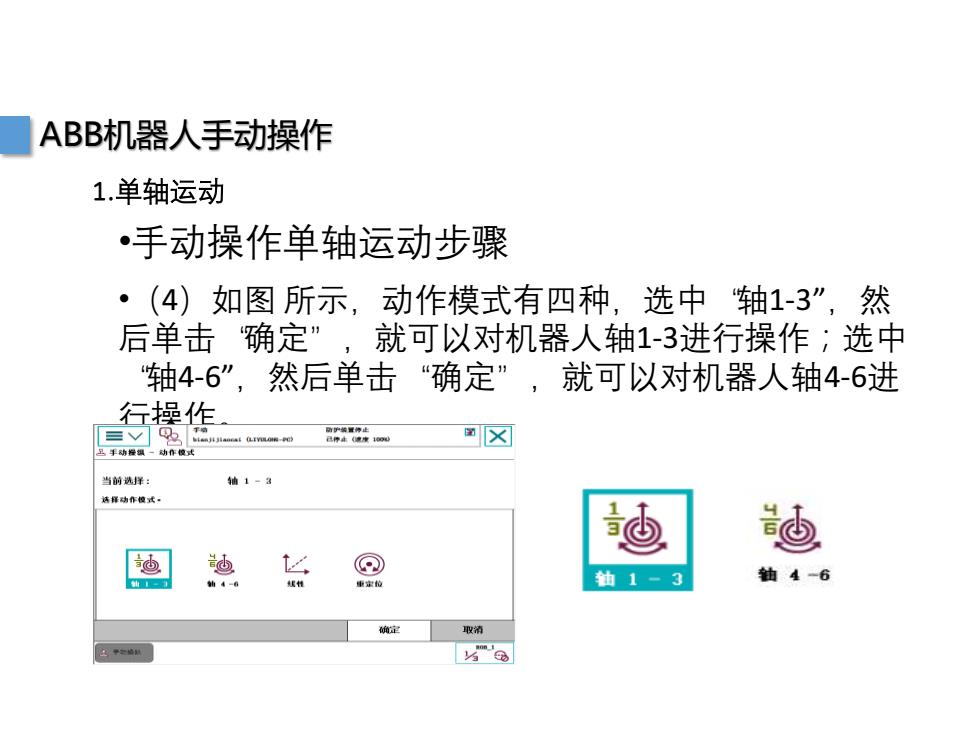
ABB机器人手动操作 1.单轴运动 •手动操作单轴运动步骤 ·(4)如图所示,动作模式有四种,选中轴1-3”,然 后单击确定”,就可以对机器人轴1-3进行操作;选中 轴4-6”,然后单击“确定”, 就可以对机器人轴4-6进 行操作 ✉☒ 手动操爆一幼作式 当前选择: 轴1-3 体择动作檀式 迪 @ 轴1-3 轴46 确定 取清
•手动操作单轴运动步骤 •(4)如图 所示,动作模式有四种,选中“轴1-3”,然 后单击“确定”,就可以对机器人轴1-3进行操作;选中 “轴4-6”,然后单击“确定”,就可以对机器人轴4-6进 行操作。 ABB机器人手动操作 1.单轴运动

ABB机器人手动操作 2.线性运动 机器人的线性运动是 指安装在机器人第六轴法 兰盘上的工具的TCP在空 间中作线性运动。线性运 动是工具的TCP在空间的X, Y、Z的线性运动,移动的 幅度较小,适合较为精确 的定位和移动
机器人的线性运动是 指安装在机器人第六轴法 兰盘上的工具的TCP在空 间中作线性运动。线性运 动是工具的TCP在空间的X、 Y、Z的线性运动,移动的 幅度较小,适合较为精确 的定位和移动。 ABB机器人手动操作 2.线性运动
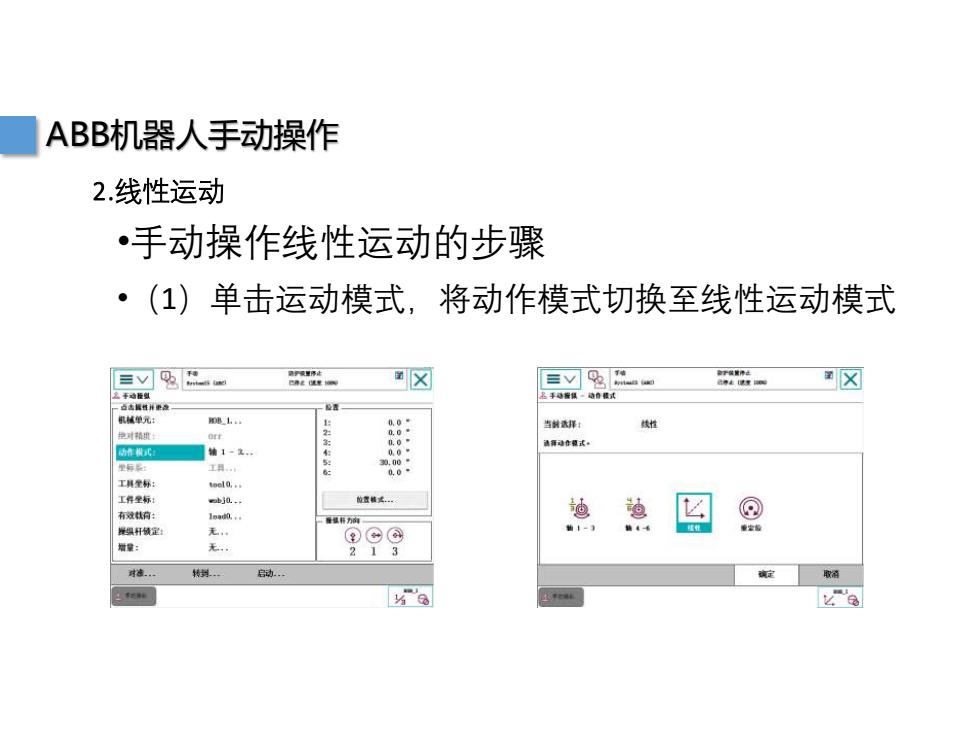
ABB机器人手动操作 2.线性运动 •手动操作线性运动的步骤 ·(1)单击运动模式,将动作模式切换至线性运动模式 区 ☒ 肌城单元: 0 23456 当敏年: 线性 防特横式 8 通源动作预式。 坐标疑 工其坐标 teol0. 工件星标 wbj0. 的置核减. 有效: . 摩模转方南 @ 操织杆颜定 无。, 1-3 8⊙© 无 213 对 转到 启动 取 ⅓a a
•手动操作线性运动的步骤 •(1)单击运动模式,将动作模式切换至线性运动模式 ABB机器人手动操作 2.线性运动
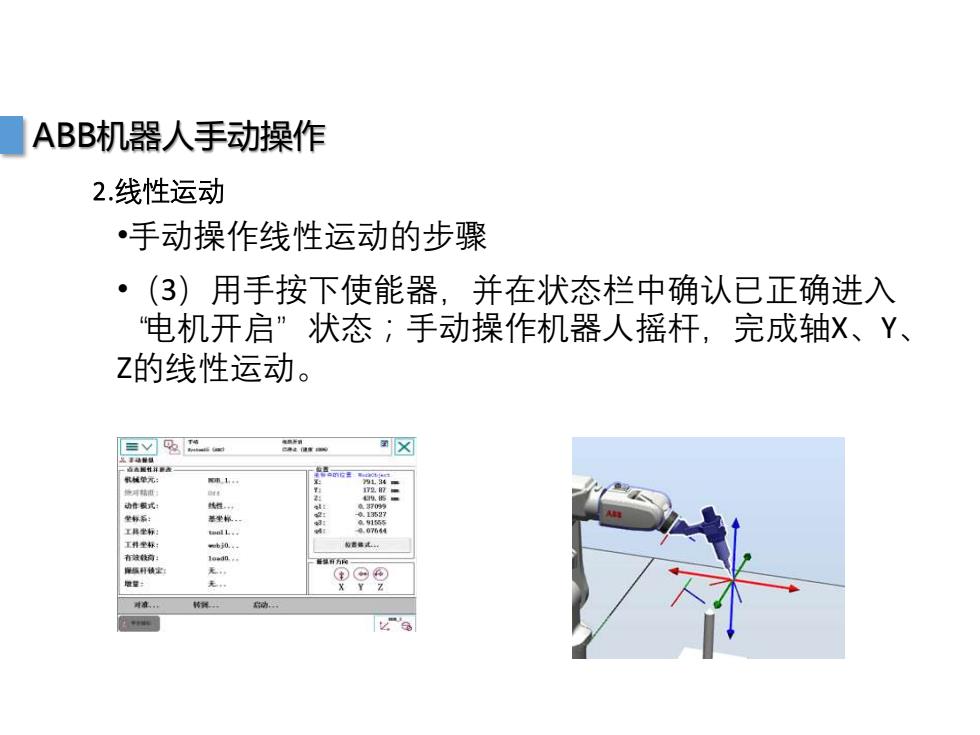
ABB机器人手动操作 2线性运动 •手动操作线性运动的步骤 ·(3)用手按下使能器,并在状态栏中确认已正确进入 “电机开启”状态;手动操作机器人摇杆,完成轴X、Y、 Z的线性运动。 系 mbj0. 无 99 动
•手动操作线性运动的步骤 •(3)用手按下使能器,并在状态栏中确认已正确进入 “电机开启”状态;手动操作机器人摇杆,完成轴X、Y、 Z的线性运动。 ABB机器人手动操作 2.线性运动
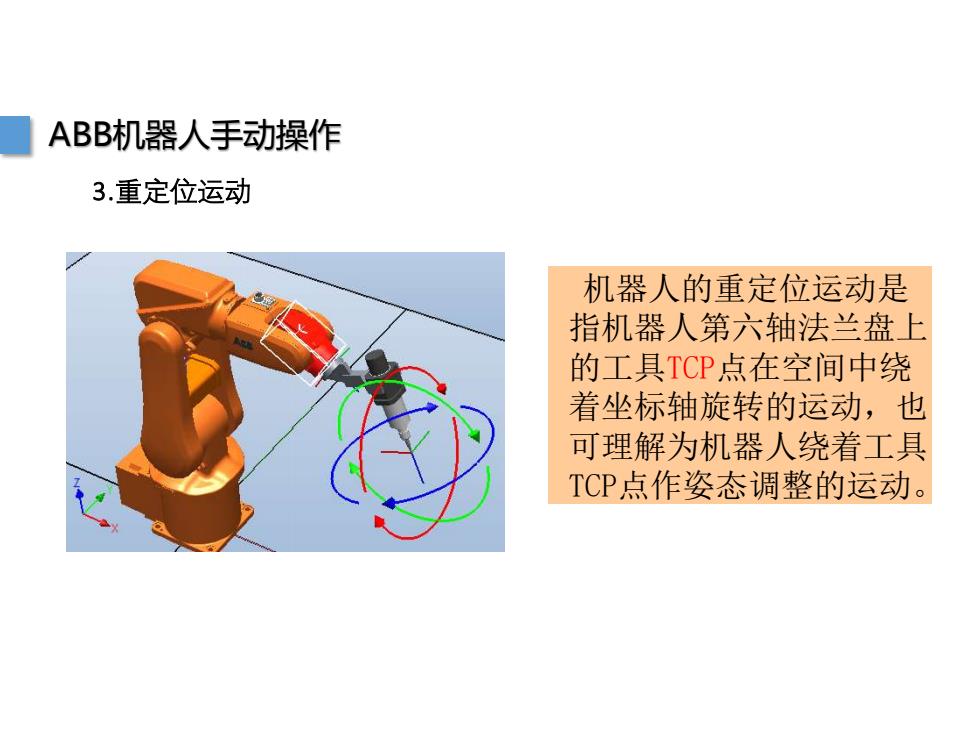
ABB机器人手动操作 3.重定位运动 机器人的重定位运动是 指机器人第六轴法兰盘上 的工具TCP点在空间中绕 着坐标轴旋转的运动,也 可理解为机器人绕着工具 TCP点作姿态调整的运动
机器人的重定位运动是 指机器人第六轴法兰盘上 的工具TCP点在空间中绕 着坐标轴旋转的运动,也 可理解为机器人绕着工具 TCP点作姿态调整的运动。 ABB机器人手动操作 3.重定位运动