一、水下仿生机器人国内外研究现状 东北大学研制了采用离子交换聚合金属材料(PMC) 驱动的小型机器鱼,该机器鱼采用红外遥控控制, IPMC驱动器的尺寸为:50mm*10mm,在2.5v的正弦波 电压驱动下,可以实现7.55mm/s的游动速度。(2008) 6 采用PMC驱动的小型机器鱼
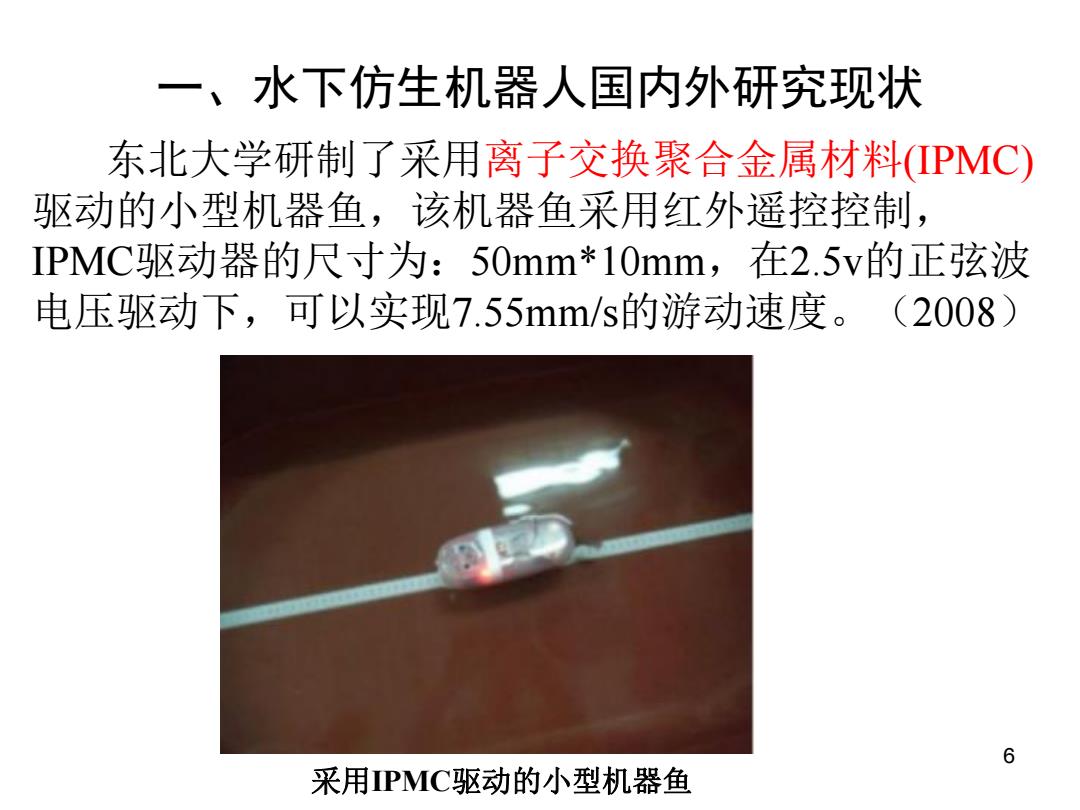
一、水下仿生机器人国内外研究现状 6 采用IPMC驱动的小型机器鱼 东北大学研制了采用离子交换聚合金属材料(IPMC) 驱动的小型机器鱼,该机器鱼采用红外遥控控制, IPMC驱动器的尺寸为:50mm*10mm,在2.5v的正弦波 电压驱动下,可以实现7.55mm/s的游动速度。(2008)
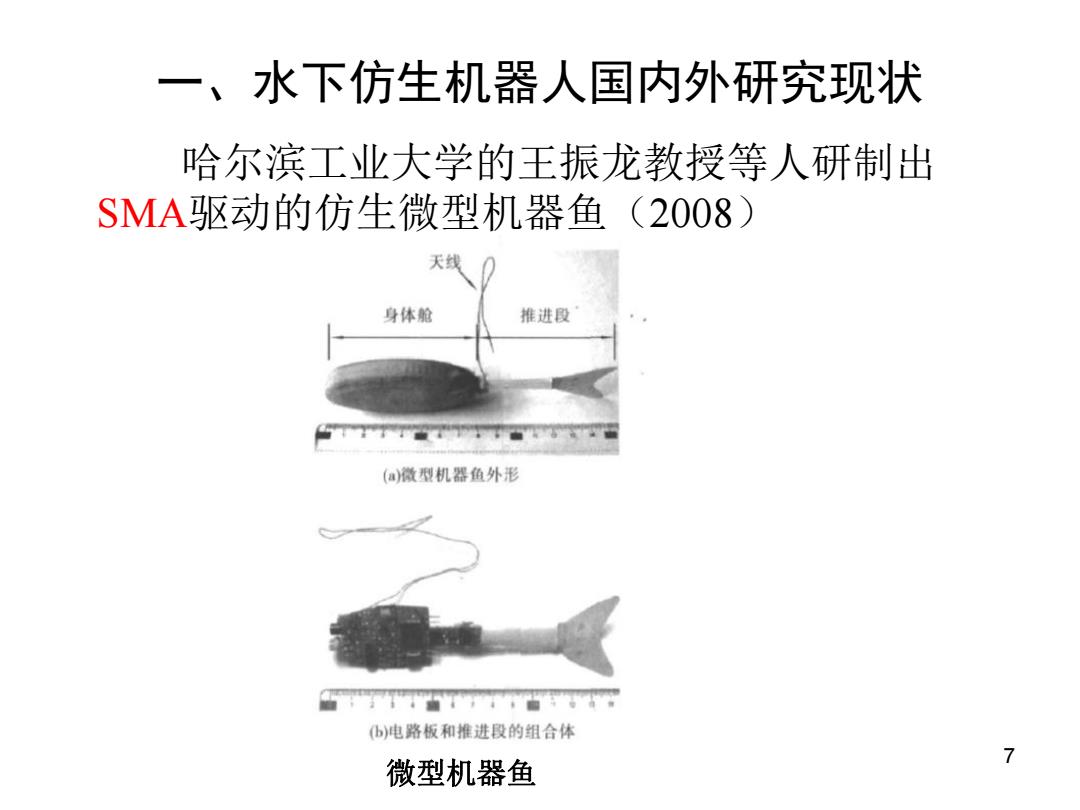
一、水下仿生机器人国内外研究现状 哈尔滨工业大学的王振龙教授等人研制出 SMA驱动的仿生微型机器鱼(2008) 天线 身体舱 推进段 (a)微型机器鱼外形 (b)电路板和推进段的组合体 7 微型机器鱼
一、水下仿生机器人国内外研究现状 7 微型机器鱼 哈尔滨工业大学的王振龙教授等人研制出 SMA驱动的仿生微型机器鱼(2008)

一、水下仿生机器人国内外研究现状 德国不莱梅Fraunhofer研究所的研究人员与德国 DFKI人工智能研究中心合作开发的带有灵敏触觉的 水下机器人。(2009) 章鱼 仿章鱼机器人 8
一、水下仿生机器人国内外研究现状 8 德国不莱梅Fraunhofer研究所的研究人员与德国 DFKI人工智能研究中心合作开发的带有灵敏触觉的 水下机器人。(2009) 章鱼 仿章鱼机器人

一、水下仿生机器人国内外研究现状 美国麻省理工学院设计的机器金枪鱼(2010) 点击查语源网页 昵图网www.nipic.com BY:a25253 金枪鱼 仿金枪鱼机器人 9
一、水下仿生机器人国内外研究现状 9 美国麻省理工学院设计的机器金枪鱼(2010) 金枪鱼 仿金枪鱼机器人

一、水下仿生机器人国内外研究现状 德国费斯托工程公司设计的机器水母。它们通过内 置在圆顶结构中的11个红外线发光二极管,可以彼此之 间进行沟通联系。该公司使用机器水母测试大规模工程 故障是否可以通过许多小型机器人系统协作来完成。( 2010) 水母 机器水母 10
一、水下仿生机器人国内外研究现状 10 德国费斯托工程公司设计的机器水母。它们通过内 置在圆顶结构中的11个红外线发光二极管,可以彼此之 间进行沟通联系。该公司使用机器水母测试大规模工程 故障是否可以通过许多小型机器人系统协作来完成。( 2010) 水母 机器水母