1160 计 算 机 学报 2011年 格被赋予一个标识符.移动对象所在的单元格的标 矩形框(左下角坐标(100,150),右上角坐标(120, 识符值被B+-tree进行索引.当处理范围查询时,需 180)内的移动对象感兴趣.因此,这个事件不会发 要通过移动对象的速度和相对时间对范围进行扩 送到订阅者, 展.Jensen等人[a)提出了支持更精确的范围查询的 基于内容的模型比较简单,但是无法记录发布 扩展算法.Yiu等人a]提出了B-tree,将一个二维 者或者订阅者的状态.例如,假设某用户(订阅者)不 的移动对象映射到四维的对偶空间进行索引.Chen 愿一天之内接连看两场电影,则最好不要在一天内 等人[3]针对移动对象经常在时空范围内发生变化 多次向他发送电影放映通知.由于基于内容的模型 的特点,提出了一种可自适应调节的STB-tree索 并不记录历史事件,无法满足这个需求,因此可以应 结构」 用基于主题空间的模型. 此外,STRIPESCs)是一个对位置和速度进行索 4.2基于主题空间的模型 引的对偶索引,它将在二维空间移动的移动对象映 基于主题空间的模型的核心概念是主题空间. 射到四维的对偶空间,并对四维空间进行PR Quad 一个主题空间实际上是一个多维空间,空间中的每 tree)索引.这样的结构提高了更新效率,但是却对 个维度分别被定义为一个元组d={name,type}, 查询效率有所影响.针对不同的当前/将来位置索引 其中ame是维度的唯一标识符,type表示数据类 技术,Chen等人[a]提出了一个测试基准,并对主要 型.例如,关于位置的主题空间可以被描述为 的当前/将来位置索引方法的特性进行了详细的比较. {(x,double),(y,double)}.此外,兴趣区域(interest region)表示订阅者感兴趣的一个子域,在某个主题 4 LBS中间件模型 空间中;对象区域(object region)表示一个对象的状 态或者属性.订阅者的订阅请求指定一组兴趣区域 中间件技术广泛地用于移动计算环境之中. 和一个过滤函数,以查看对象区域是否符合订阅标 LBS系统将LBS中间件作为服务处理引擎与终端用 准;发布者的发布准则指定了一组对象区域和一个 户之间的软件载体,隐藏了具体技术细节,便于向客 过滤函数,以查看兴趣区域是否与本次发布匹配.可 户端提供服务.主要的LBS中间件模型有三种,包括 基于内容的模型(content-based model)、基于主题 以通过订阅请求和发布准则来判定是否匹配0 在基于主题空间的模型中,信息在发布之后仍 空间的模型(subject space--based model)和元组空 旧会保留在系统之中,而不是直接被移除,因此该模 间模型(tuple space model),前两个模型又可被归 为发布/订阅模型(publish,/subscribe model).发布/ 型支持有状态的发布/订阅.此外,也有助于实现对 订阅模型是移动计算中应用最为广泛的中间件模型 称的发布/订阅系统.换句话说,仅当发布准则与订 之一.该模型中有两个角色:发布者和订阅者(也称 阅请求匹配时才会向订阅者发送信息.这个特性能 消费者),二者之间通过事件交换信息,发布者产生 有效降低信息发布量,避免了冗余信息的传播, 事件,订阅者向发布者发送订阅请求.当特定事件发 4.3元组空间模型 生时,即可将该事件通知订阅者.发布者与订阅者之 元组空间模型最早被用于并行编程领域,以协 间的联系并不紧密,是松耦合的:换言之,当订阅者 调并发执行的任务,一个元组是一个包含多项值的 暂时无法工作时,发布者仍可发布事件4]」 矢量,元组空间是一个包含许多元组的集合.多个任 4.1基于内容的模型 务共享一个元组空间,可以通过改变元组空间中的 在本模型中,一个事件被描述为一组(属性,值) 各个元组值(或插入新元组)来实现任务间通信.因 对子,而订阅请求则被描述为一个事件相关的谓词. 此,一般情况下任务间通信是松耦合、匿名化的.如 对于任一事件,检查所有订阅请求的谓词:当谓词为 果想实现同步化通信的目的,则在任务向元组空间发 真时,则将该事件发布给订阅者 送信息之后,必须等待目标任务产生响应元组们 例如,假设某个LBS系统中某个移动对象产生 一般来说,元组空间模型需要支持3个原子 的事件为{(id,"救护车"),(location,(100,200))}, 操作。 表明某一辆救护车的当前坐标是(100,200).订阅者 rite(t):向元组空间插入一个元组t; 的请求是:(location,(x>100)and(x<120)and extract(p):从元组空间中取出符合谓词p的 (y>150)and(y<180)),表示订阅者对于空间上 元组:
格被赋予一个标识符.移动对象所在的单元格的标 识符值被B+tree进行索引.当处理范围查询时,需 要通过移动对象的速度和相对时间对范围进行扩 展.Jensen等人[34]提出了支持更精确的范围查询的 扩展算法.Yiu等人[35]提出了Bdualtree,将一个二维 的移动对象映射到四维的对偶空间进行索引.Chen 等人[36]针对移动对象经常在时空范围内发生变化 的特点,提出了一种可自适应调节的ST2Btree索 引结构.此外,STRIPES[37]是一个对位置和速度进行索 引的对偶索引,它将在二维空间移动的移动对象映 射到四维的对偶空间,并对四维空间进行PRQuad tree[17]索引.这样的结构提高了更新效率,但是却对 查询效率有所影响.针对不同的当前/将来位置索引 技术,Chen等人[38]提出了一个测试基准,并对主要 的当前/将来位置索引方法的特性进行了详细的比较. 4犔犅犛中间件模型 中间件技术广泛地用于移动计算环境之中. LBS系统将LBS中间件作为服务处理引擎与终端用 户之间的软件载体,隐藏了具体技术细节,便于向客 户端提供服务.主要的LBS中间件模型有三种,包括 基于内容的模型(contentbasedmodel)、基于主题 空间的模型(subjectspacebasedmodel)和元组空 间模型(tuplespacemodel).前两个模型又可被归 为发布/订阅模型(publish/subscribemodel).发布/ 订阅模型是移动计算中应用最为广泛的中间件模型 之一.该模型中有两个角色:发布者和订阅者(也称 消费者),二者之间通过事件交换信息.发布者产生 事件,订阅者向发布者发送订阅请求.当特定事件发 生时,即可将该事件通知订阅者.发布者与订阅者之 间的联系并不紧密,是松耦合的;换言之,当订阅者 暂时无法工作时,发布者仍可发布事件[4,39]. 41基于内容的模型 在本模型中,一个事件被描述为一组(属性,值) 对子,而订阅请求则被描述为一个事件相关的谓词. 对于任一事件,检查所有订阅请求的谓词;当谓词为 真时,则将该事件发布给订阅者[4]. 例如,假设某个LBS系统中某个移动对象产生 的事件为{(犻犱,"救护车"),(犾狅犮犪狋犻狅狀,(100,200))}, 表明某一辆救护车的当前坐标是(100,200).订阅者 的请求是:(犾狅犮犪狋犻狅狀,(狓>100)and(狓<120)and (狔>150)and(狔<180)),表示订阅者对于空间上 矩形框(左下角坐标(100,150),右上角坐标(120, 180))内的移动对象感兴趣.因此,这个事件不会发 送到订阅者. 基于内容的模型比较简单,但是无法记录发布 者或者订阅者的状态.例如,假设某用户(订阅者)不 愿一天之内接连看两场电影,则最好不要在一天内 多次向他发送电影放映通知.由于基于内容的模型 并不记录历史事件,无法满足这个需求,因此可以应 用基于主题空间的模型. 42基于主题空间的模型 基于主题空间的模型的核心概念是主题空间. 一个主题空间实际上是一个多维空间,空间中的每 个维度分别被定义为一个元组犱={狀犪犿犲,狋狔狆犲}, 其中狀犪犿犲是维度的唯一标识符,狋狔狆犲表示数据类 型.例如,关于位置的主题空间可以被描述为 {(狓,犱狅狌犫犾犲),(狔,犱狅狌犫犾犲)}.此外,兴趣区域(interest region)表示订阅者感兴趣的一个子域,在某个主题 空间中;对象区域(objectregion)表示一个对象的状 态或者属性.订阅者的订阅请求指定一组兴趣区域 和一个过滤函数,以查看对象区域是否符合订阅标 准;发布者的发布准则指定了一组对象区域和一个 过滤函数,以查看兴趣区域是否与本次发布匹配.可 以通过订阅请求和发布准则来判定是否匹配[40]. 在基于主题空间的模型中,信息在发布之后仍 旧会保留在系统之中,而不是直接被移除,因此该模 型支持有状态的发布/订阅.此外,也有助于实现对 称的发布/订阅系统.换句话说,仅当发布准则与订 阅请求匹配时才会向订阅者发送信息.这个特性能 有效降低信息发布量,避免了冗余信息的传播. 43元组空间模型 元组空间模型最早被用于并行编程领域,以协 调并发执行的任务.一个元组是一个包含多项值的 矢量,元组空间是一个包含许多元组的集合.多个任 务共享一个元组空间,可以通过改变元组空间中的 各个元组值(或插入新元组)来实现任务间通信.因 此,一般情况下任务间通信是松耦合、匿名化的.如 果想实现同步化通信的目的,则在任务向元组空间发 送信息之后,必须等待目标任务产生响应元组[41]. 一般来说,元组空间模型需要支持3个原子 操作. 狑狉犻狋犲(狋):向元组空间插入一个元组狋; 犲狓狋狉犪犮狋(狆):从元组空间中取出符合谓词狆的 元组; 1160 计 算 机 学 报 2011年
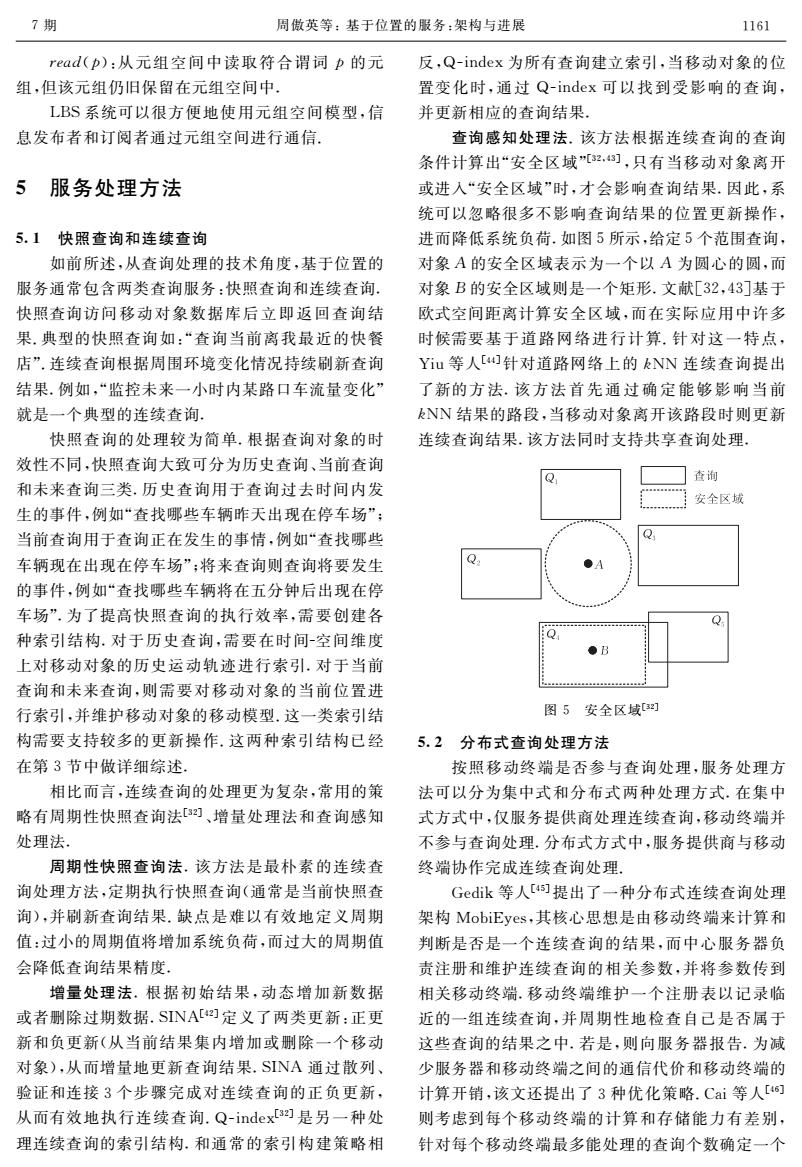
7期 周做英等:基于位置的服务:架构与进展 1161 read(p):从元组空间中读取符合谓词p的元 反,Q-index为所有查询建立索引,当移动对象的位 组,但该元组仍旧保留在元组空间中, 置变化时,通过Q-index可以找到受影响的查询, LBS系统可以很方便地使用元组空间模型,信 并更新相应的查询结果 息发布者和订阅者通过元组空间进行通信, 查询感知处理法.该方法根据连续查询的查询 条件计算出“安全区域”2],只有当移动对象离开 5 服务处理方法 或进入“安全区域”时,才会影响查询结果.因此,系 统可以忽略很多不影响查询结果的位置更新操作, 5.1快照查询和连续查询 进而降低系统负荷.如图5所示,给定5个范围查询, 如前所述,从查询处理的技术角度,基于位置的 对象A的安全区域表示为一个以A为圆心的圆,而 服务通常包含两类查询服务:快照查询和连续查询. 对象B的安全区域则是一个矩形.文献[32,43]基于 快照查询访问移动对象数据库后立即返回查询结 欧式空间距离计算安全区域,而在实际应用中许多 果.典型的快照查询如:“查询当前离我最近的快餐 时候需要基于道路网络进行计算.针对这一特点, 店”.连续查询根据周围环境变化情况持续刷新查询 Yiu等人[针对道路网络上的kNN连续查询提出 结果.例如,“监控未来一小时内某路口车流量变化” 了新的方法.该方法首先通过确定能够影响当前 就是一个典型的连续查询. kNN结果的路段,当移动对象离开该路段时则更新 快照查询的处理较为简单.根据查询对象的时 连续查询结果.该方法同时支持共享查询处理。 效性不同,快照查询大致可分为历史查询、当前查询 查询 和未来查询三类,历史查询用于查询过去时间内发 安全区域 生的事件,例如“查找哪些车辆昨天出现在停车场”; 当前查询用于查询正在发生的事情,例如“查找哪些 Q 车辆现在出现在停车场”;将来查询则查询将要发生 Q A 的事件,例如“查找哪些车辆将在五分钟后出现在停 车场”.为了提高快照查询的执行效率,需要创建各 Q 种索引结构.对于历史查询,需要在时间-空间维度 Q ●B 上对移动对象的历史运动轨迹进行索引.对于当前 查询和未来查询,则需要对移动对象的当前位置进 行索引,并维护移动对象的移动模型.这一类索引结 图5安全区域3町 构需要支持较多的更新操作.这两种索引结构已经 5.2分布式查询处理方法 在第3节中做详细综述。 按照移动终端是否参与查询处理,服务处理方 相比而言,连续查询的处理更为复杂,常用的策 法可以分为集中式和分布式两种处理方式,在集中 略有周期性快照查询法[3)、增量处理法和查询感知 式方式中,仅服务提供商处理连续查询,移动终端并 处理法。 不参与查询处理.分布式方式中,服务提供商与移动 周期性快照查询法,该方法是最朴素的连续查 终端协作完成连续查询处理, 询处理方法,定期执行快照查询(通常是当前快照查 Gedik等人[4)提出了一种分布式连续查询处理 询),并刷新查询结果.缺点是难以有效地定义周期 架构MobiEyes,其核心思想是由移动终端来计算和 值:过小的周期值将增加系统负荷,而过大的周期值 判断是否是一个连续查询的结果,而中心服务器负 会降低查询结果精度, 责注册和维护连续查询的相关参数,并将参数传到 增量处理法.根据初始结果,动态增加新数据 相关移动终端.移动终端维护一个注册表以记录临 或者删除过期数据.SINA[a]定义了两类更新:正更 近的一组连续查询,并周期性地检查自己是否属于 新和负更新(从当前结果集内增加或删除一个移动 这些查询的结果之中.若是,则向服务器报告.为减 对象),从而增量地更新查询结果.SINA通过散列、 少服务器和移动终端之间的通信代价和移动终端的 验证和连接3个步骤完成对连续查询的正负更新, 计算开销,该文还提出了3种优化策略.Cai等人) 从而有效地执行连续查询.Q-index3)是另一种处 则考虑到每个移动终端的计算和存储能力有差别, 理连续查询的索引结构,和通常的索引构建策略相 针对每个移动终端最多能处理的查询个数确定一个
狉犲犪犱(狆):从元组空间中读取符合谓词狆的元 组,但该元组仍旧保留在元组空间中. LBS系统可以很方便地使用元组空间模型,信 息发布者和订阅者通过元组空间进行通信. 5服务处理方法 51快照查询和连续查询 如前所述,从查询处理的技术角度,基于位置的 服务通常包含两类查询服务:快照查询和连续查询. 快照查询访问移动对象数据库后立即返回查询结 果.典型的快照查询如:“查询当前离我最近的快餐 店”.连续查询根据周围环境变化情况持续刷新查询 结果.例如,“监控未来一小时内某路口车流量变化” 就是一个典型的连续查询. 快照查询的处理较为简单.根据查询对象的时 效性不同,快照查询大致可分为历史查询、当前查询 和未来查询三类.历史查询用于查询过去时间内发 生的事件,例如“查找哪些车辆昨天出现在停车场”; 当前查询用于查询正在发生的事情,例如“查找哪些 车辆现在出现在停车场”;将来查询则查询将要发生 的事件,例如“查找哪些车辆将在五分钟后出现在停 车场”.为了提高快照查询的执行效率,需要创建各 种索引结构.对于历史查询,需要在时间空间维度 上对移动对象的历史运动轨迹进行索引.对于当前 查询和未来查询,则需要对移动对象的当前位置进 行索引,并维护移动对象的移动模型.这一类索引结 构需要支持较多的更新操作.这两种索引结构已经 在第3节中做详细综述. 相比而言,连续查询的处理更为复杂,常用的策 略有周期性快照查询法[32]、增量处理法和查询感知 处理法.周期性快照查询法.该方法是最朴素的连续查 询处理方法,定期执行快照查询(通常是当前快照查 询),并刷新查询结果.缺点是难以有效地定义周期 值:过小的周期值将增加系统负荷,而过大的周期值 会降低查询结果精度. 增量处理法.根据初始结果,动态增加新数据 或者删除过期数据.SINA[42]定义了两类更新:正更 新和负更新(从当前结果集内增加或删除一个移动 对象),从而增量地更新查询结果.SINA通过散列、 验证和连接3个步骤完成对连续查询的正负更新, 从而有效地执行连续查询.Qindex[32]是另一种处 理连续查询的索引结构.和通常的索引构建策略相 反,Qindex为所有查询建立索引,当移动对象的位 置变化时,通过Qindex可以找到受影响的查询, 并更新相应的查询结果. 查询感知处理法.该方法根据连续查询的查询 条件计算出“安全区域”[32,43],只有当移动对象离开 或进入“安全区域”时,才会影响查询结果.因此,系 统可以忽略很多不影响查询结果的位置更新操作, 进而降低系统负荷.如图5所示,给定5个范围查询, 对象犃的安全区域表示为一个以犃为圆心的圆,而 对象犅的安全区域则是一个矩形.文献[32,43]基于 欧式空间距离计算安全区域,而在实际应用中许多 时候需要基于道路网络进行计算.针对这一特点, Yiu等人[44]针对道路网络上的犽NN连续查询提出 了新的方法.该方法首先通过确定能够影响当前 犽NN结果的路段,当移动对象离开该路段时则更新 连续查询结果.该方法同时支持共享查询处理. 图5安全区域[32] 52分布式查询处理方法 按照移动终端是否参与查询处理,服务处理方 法可以分为集中式和分布式两种处理方式.在集中 式方式中,仅服务提供商处理连续查询,移动终端并 不参与查询处理.分布式方式中,服务提供商与移动 终端协作完成连续查询处理. Gedik等人[45]提出了一种分布式连续查询处理 架构MobiEyes,其核心思想是由移动终端来计算和 判断是否是一个连续查询的结果,而中心服务器负 责注册和维护连续查询的相关参数,并将参数传到 相关移动终端.移动终端维护一个注册表以记录临 近的一组连续查询,并周期性地检查自己是否属于 这些查询的结果之中.若是,则向服务器报告.为减 少服务器和移动终端之间的通信代价和移动终端的 计算开销,该文还提出了3种优化策略.Cai等人[46] 则考虑到每个移动终端的计算和存储能力有差别, 针对每个移动终端最多能处理的查询个数确定一个 7期 周傲英等:基于位置的服务:架构与进展 1161