ROS INFO STREAM THROTTLE 2, "My once INFO stream message;i="<<i )方 ros::Duration(1 ).sleep(); 最后,带名字的,条件的,和一次/定时的消息可以组合使用。 使用rosconsole和rxconsole来在线改变调试Ievel 在ROS的框架中,rosconsole API在前面的实验中己经被用来实现一些功能。更多的功 能可以查看具体API说明。 除了在node中使用API的方式配置日志的记录,ROS还提供了一个图形化界面工具 xconsole,他是rxtools包中的一个部件。在命令行中输入xconsole,在出现的图形化界面中 可以进行查看,检查和配置所有node的日志子系统。 首先,我们运行一个带有日志信息输出的例程 rosrun chapter4 example3 然后在另一个终端中运行rosconsole。将出现以下界面 rxconsole http://ocathost:11311 Message Severity Node Severity Fatal Error warn info Debug se dlear Setup Levels New window. Enebled Include Reges FromMessage Node Location Topics 一旦eample.3例程运行并输出日志信息,可以在rxconsole界面中观察到。 -6-
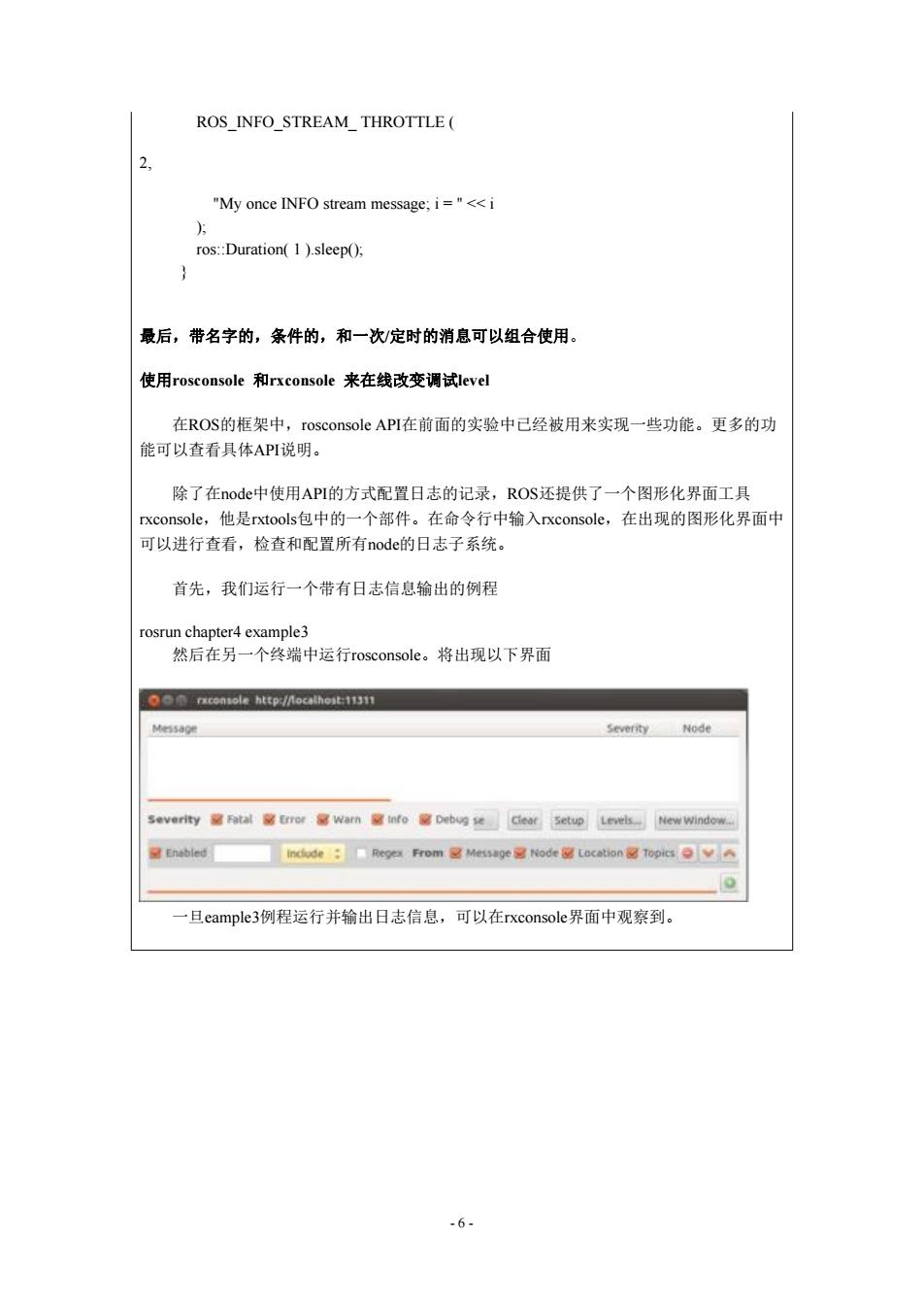
- 6 - ROS_INFO_STREAM_ THROTTLE ( 2, "My once INFO stream message; i = " << i ); ros::Duration( 1 ).sleep(); } 最后,带名字的,条件的,和一次/定时的消息可以组合使用。 使用rosconsole 和rxconsole 来在线改变调试level 在ROS的框架中,rosconsole API在前面的实验中已经被用来实现一些功能。更多的功 能可以查看具体API说明。 除了在node中使用API的方式配置日志的记录,ROS还提供了一个图形化界面工具 rxconsole,他是rxtools包中的一个部件。在命令行中输入rxconsole,在出现的图形化界面中 可以进行查看,检查和配置所有node的日志子系统。 首先,我们运行一个带有日志信息输出的例程 rosrun chapter4 example3 然后在另一个终端中运行rosconsole。将出现以下界面 一旦eample3例程运行并输出日志信息,可以在rxconsole界面中观察到
ee et。 27里550城发 nAgr3ttet·n3净nFd2g3k25 1两4,5内t5164有4题 oKudld shla 号达小制管起t空绿 e拉体 14252套3Ay5 rt24:t334i计”4ntr1年rvra U制taEk vcinohn ggr风rtt4t"3,pr红+aairgeeirohna字Irna 3ta为3过):442华3N》 B4 2 nohitipn'tntauw6k1形 rh aa 后4g NIN 。。1有tE+上 4 gm新be《n,1v1# 卷4 urasn4ek rh arolel 12613461VES 435 erapescutn"3W计g'atEtstiurgvsarols年fnru ●C0U3.n235 flz ,7k3222g比C1 a3g350n0为3过h4人,2sw言) awG星签w量的m显rh酸E地? 园a女Es大aww 里eM tg正wkn8N意wt里00是1e4yn 在以上的表中,有多个列提供信息包括。消息名称,level,产生的node,产生的时间戳, topic名称,和日志打印宏在程序中的位置。 我们可以通过Pause按钮来暂停或者开始接受消息。请暂停一个日志并观察输出界面的 内容。 00 Node:/cxample3 Tmme:135773035B.001145651 Severlty:Info Locatlon:/home/enrique/dev/rosbook/chapter3_tutarlals/src/example3.cpp:main:23 Publlshed Toples:/rosout INFO throttle message. 下面我们测试一下rxconsole的日志筛选功能。最基本的筛选项是levelf值。可以试验如果 只看FATAL和ERROR的日志。会得到如下效果 L-AINUEEEIN181 No HwMYA 5h5 1i4:w2+e室me多:w量EFQ6 另外我吗还可以通过日志消息的内容,node名称,位置和topic名称,来进行滤波,甚至 还可以使用正则表达式,来组合多种筛选项。 测试Clear的消息清除功能。Setup按钮可以用来配置诊断累计的topic名称(默认为 rosout_agg),GUI最多缓存的日志消息条数。其中诊断累计器是一个ROS服务器的一个接 -7
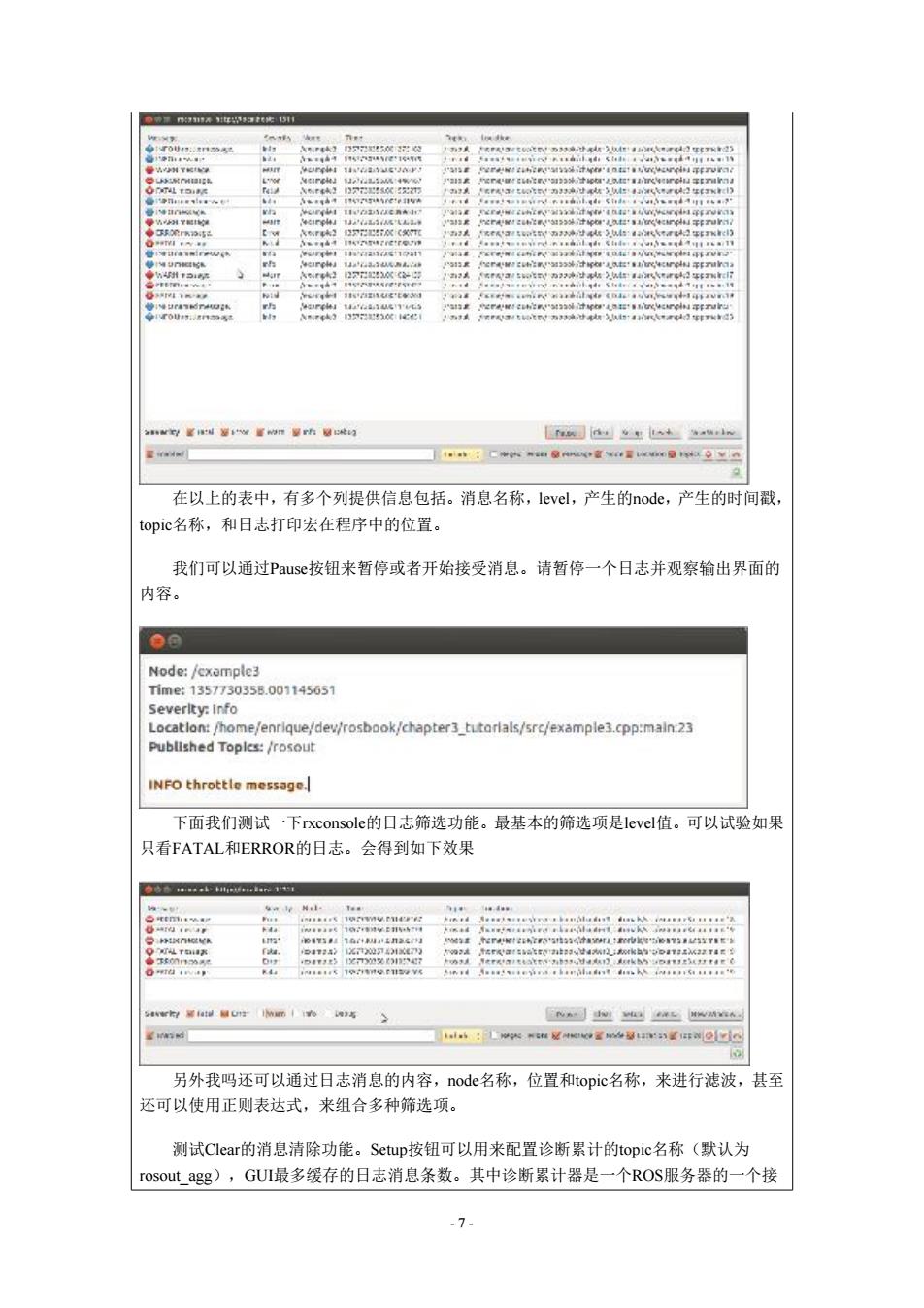
- 7 - 在以上的表中,有多个列提供信息包括。消息名称,level,产生的node,产生的时间戳, topic名称,和日志打印宏在程序中的位置。 我们可以通过Pause按钮来暂停或者开始接受消息。请暂停一个日志并观察输出界面的 内容。 下面我们测试一下rxconsole的日志筛选功能。最基本的筛选项是level值。可以试验如果 只看FATAL和ERROR的日志。会得到如下效果 另外我吗还可以通过日志消息的内容,node名称,位置和topic名称,来进行滤波,甚至 还可以使用正则表达式,来组合多种筛选项。 测试Clear的消息清除功能。Setup按钮可以用来配置诊断累计的topic名称(默认为 rosout_agg),GUI最多缓存的日志消息条数。其中诊断累计器是一个ROS服务器的一个接