实验编号: 实验指导书 实验项目: ROS系统安装 所属课程:ROS机器人操作系统基础与实战 课程代码: 面向专业: 机电专业 课程负责人: 朱笑笑 年月 日
实验编号: 实 验 指 导 书 实验项目: ROS 系统安装 所属课程: ROS 机器人操作系统基础与实战 课程代码: 面向专业: 机电专业 课程负责人: 朱笑笑 年 月 日
实验目的 通过让学生实际动手安装系统,让学生掌握Ubutnul6.O4及Ros Kine的安装 方法。熟悉ROS环境的配置,工作空间的创建,ros的文件系统等。 二、 实验内容 1. 完成Ubuntule6.04的安装 2. 完成Ros Kinect的安装 3. 创建一个新的ROS工作空间,完成环境的设置 查看ROS的文件结构 5. ROS包常用工具使用 三、 实验过程或其他示意图 1.buntule6.04的安装过程 Stepl.制作Ubuntule6.04的U盘启动盘。 进入Windows系统,插入U盘,打开UltraIS0软件,然后载入Ubuntu的 I$0文件,在点击启动选项(记得点开加载后的镜像,使之展开如图)然后点击 写入硬盘映像选项点击它进入到将要进行操作的界面。在写入磁盘映像界面在磁 盘驱动器一栏,选择插入的U盘,点击确定后开始制作。 文件漫作A自动®)工D话项⊙)秘助 写人预歌餐 图 ■。、动绿制作软盘映像文件 消息: 保存 可入饮盘映像 光盘目录: 时a 事件 路 雪朝作硬血映像文件 下车0的3321 玉1o10 笔写入硬曲映单 -☐bo0t 从软座/硬盘宽动器提取导盘区 白casper dists 从CD/DVD提殿引导文件, 最加习导文件… isolinux 保存写导文件 pies 白po1 清除导信旦 装像文件:面国aa204H中e preseed √生成向动信息表 便建8动 )制作多重启动光强 启动分区:无 完成比: 0 已用时闻:00.c0:0 处时两:成而高 Step2.设置BIOS以U盘作为启动盘 按FI2进入Boot选项(注意不同电脑可能会有不同的快捷键,另外也可以 直接进入BIOS后找到Boot设置选项),调整开机引导顺序,以U盘作为首选启 动媒介。 Step3.进入试用界面 进行语言选择,选择试用。在试用界面可以进行常规的操作,相当于一个安 装在U盘上的Ubutun系统。在桌面上点击安装即可以开始安装。(在上一个界 面直接点击安装也能够进行下一步的安装界面) 2
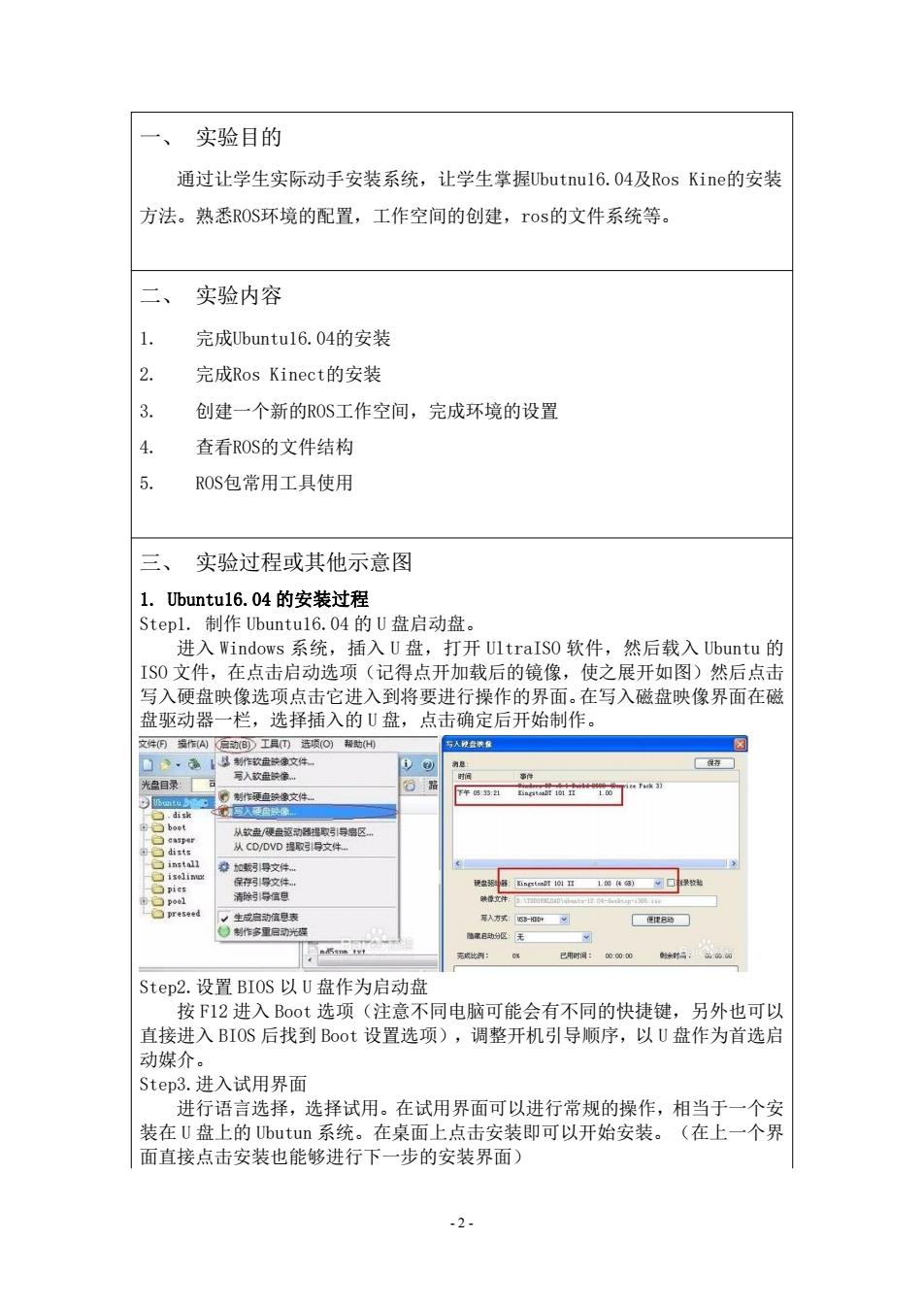
- 2 - 一、 实验目的 通过让学生实际动手安装系统,让学生掌握Ubutnu16.04及Ros Kine的安装 方法。熟悉ROS环境的配置,工作空间的创建,ros的文件系统等。 二、 实验内容 1. 完成Ubuntu16.04的安装 2. 完成Ros Kinect的安装 3. 创建一个新的ROS工作空间,完成环境的设置 4. 查看ROS的文件结构 5. ROS包常用工具使用 三、 实验过程或其他示意图 1. Ubuntu16.04 的安装过程 Step1. 制作 Ubuntu16.04 的 U 盘启动盘。 进入 Windows 系统,插入 U 盘,打开 UltraISO 软件,然后载入 Ubuntu 的 ISO 文件,在点击启动选项(记得点开加载后的镜像,使之展开如图)然后点击 写入硬盘映像选项点击它进入到将要进行操作的界面。在写入磁盘映像界面在磁 盘驱动器一栏,选择插入的 U 盘,点击确定后开始制作。 Step2.设置 BIOS 以 U 盘作为启动盘 按 F12 进入 Boot 选项(注意不同电脑可能会有不同的快捷键,另外也可以 直接进入 BIOS 后找到 Boot 设置选项),调整开机引导顺序,以 U 盘作为首选启 动媒介。 Step3.进入试用界面 进行语言选择,选择试用。在试用界面可以进行常规的操作,相当于一个安 装在 U 盘上的 Ubutun 系统。在桌面上点击安装即可以开始安装。(在上一个界 面直接点击安装也能够进行下一步的安装界面)

Galego Thai ese Eengali eder lan ubuntue Norsk ag 中文) 试用ibuntu而不安装() 从第一硬盘号向 世01 Eestl Bai锤 拆助2语言3健盘布局下4模式5精动族6其它 Ba品经塑 Step4.正式安装前的一些配置。 语言选择中文、取消安装时联网下载、选择其他选项分区 Step5.磁盘的分区 为Jbuntu系统分配磁盘空间,其中/于indows系统C盘类似,swap分区类 似于虚拟内存单,即在系统的物理内存不够用的时候,把硬盘空间中的一部分空 间释放出来,以供当前运行的程序使用。B0o分区是是操作系统的内核及在引导 过程中使用的文件。Hoe分区是用户的存储区,类似与D、E盘等。具体操作如 下: 在空闲的磁盘上,点击的“+”创建4个主要的基础分区,并进行相应的挂载 A)创建I分区: >30G 主分区 空间起始位置 Ext4日志文件系统 B)创建swap分区: 2048MB 逻辑分区 空间起始位置 交换空间 C)创建boot分区: 200MB 逻辑分区 空间起始位置 Ext4日志文件系统 /boot D)创建home分区: 剩余的空间 逻辑分区 空间起始位置 Ext4日志文件系统 /home -3-
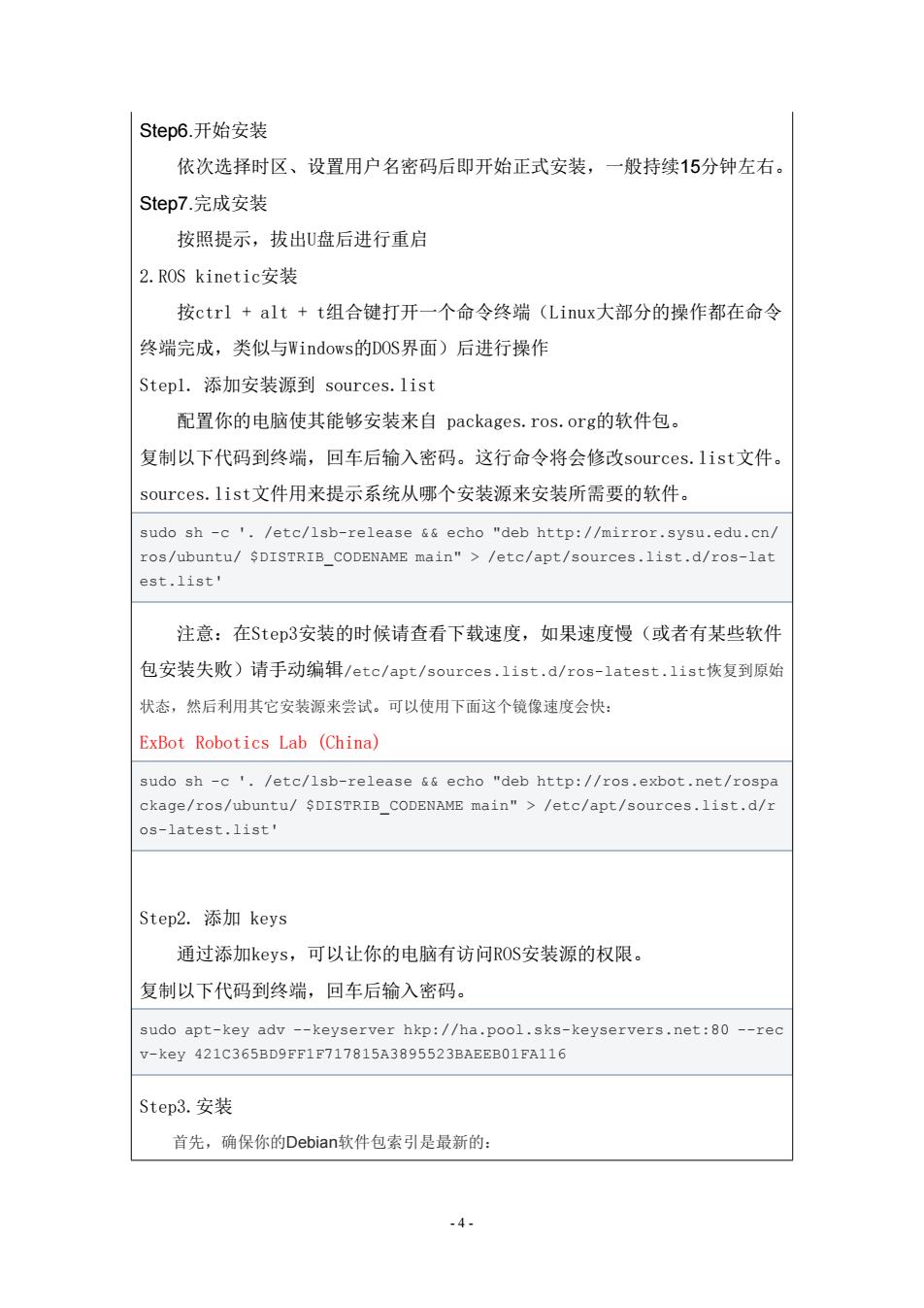
- 3 - Step4.正式安装前的一些配置。 语言选择中文、取消安装时联网下载、选择其他选项分区 Step5.磁盘的分区 为Ubuntu系统分配磁盘空间,其中/于Windows系统C盘类似,swap分区类 似于虚拟内存单,即在系统的物理内存不够用的时候,把硬盘空间中的一部分空 间释放出来,以供当前运行的程序使用。Boot分区是是操作系统的内核及在引导 过程中使用的文件。Home分区是用户的存储区,类似与D、E盘等。具体操作如 下: 在空闲的磁盘上,点击的“+”创建4个主要的基础分区,并进行相应的挂载 A)创建 / 分区: >30G 主分区 空间起始位置 Ext4日志文件系统 / B)创建swap分区: 2048MB 逻辑分区 空间起始位置 交换空间 C)创建boot分区: 200MB 逻辑分区 空间起始位置 Ext4日志文件系统 /boot D)创建home分区: 剩余的空间 逻辑分区 空间起始位置 Ext4日志文件系统 /home
Step6.开始安装 依次选择时区、设置用户名密码后即开始正式安装,一般持续15分钟左右。 Step7.完成安装 按照提示,拔出U盘后进行重启 2.ROS kinetic安装 按ctrl+alt+t组合键打开一个命令终端(Linux大部分的操作都在命令 终端完成,类似与Windows的DOS界面)后进行操作 Stepl.添加安装源到sources.list 配置你的电脑使其能够安装来自packages.ros.org的软件包。 复制以下代码到终端,回车后输入密码。这行命令将会修改sources..list文件。 sources.list文件用来提示系统从哪个安装源来安装所需要的软件。 sudo sh-c '/etc/lsb-release &echo "deb http://mirror.sysu.edu.cn/ ros/ubuntu/$DISTRIB CODENAME main">/etc/apt/sources.list.d/ros-lat est.list' 注意:在Step3安装的时候请查看下载速度,如果速度慢(或者有某些软件 包安装失败)请手动编辑/etc/apt/sources.list.d/ros-latest.1ist恢复到原始 状态,然后利用其它安装源来尝试。可以使用下面这个镜像速度会快: ExBot Robotics Lab (China) sudo sh -c'./etc/lsb-release &echo "deb http://ros.exbot.net/rospa ckage/ros/ubuntu/$DISTRIB CODENAME main">/etc/apt/sources.list.d/r os-latest.list' Step2.添加keys 通过添加keys,可以让你的电脑有访问ROS安装源的权限。 复制以下代码到终端,回车后输入密码。 sudo apt-key adv--keyserver hkp://ha.pool.sks-keyservers.net:80--rec V-key421C365BD9FF1F717815A3895523 BAEEB01FA116 Step3.安装 首先,确保你的Debian软件包索引是最新的: -4-
- 4 - Step6.开始安装 依次选择时区、设置用户名密码后即开始正式安装,一般持续15分钟左右。 Step7.完成安装 按照提示,拔出U盘后进行重启 2.ROS kinetic安装 按ctrl + alt + t组合键打开一个命令终端(Linux大部分的操作都在命令 终端完成,类似与Windows的DOS界面)后进行操作 Step1. 添加安装源到 sources.list 配置你的电脑使其能够安装来自 packages.ros.org的软件包。 复制以下代码到终端,回车后输入密码。这行命令将会修改sources.list文件。 sources.list文件用来提示系统从哪个安装源来安装所需要的软件。 sudo sh -c '. /etc/lsb-release && echo "deb http://mirror.sysu.edu.cn/ ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-lat est.list' 注意:在Step3安装的时候请查看下载速度,如果速度慢(或者有某些软件 包安装失败)请手动编辑/etc/apt/sources.list.d/ros-latest.list恢复到原始 状态,然后利用其它安装源来尝试。可以使用下面这个镜像速度会快: ExBot Robotics Lab (China) sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospa ckage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/r os-latest.list' Step2. 添加 keys 通过添加keys,可以让你的电脑有访问ROS安装源的权限。 复制以下代码到终端,回车后输入密码。 sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --rec v-key 421C365BD9FF1F717815A3895523BAEEB01FA116 Step3.安装 首先,确保你的Debian软件包索引是最新的:
sudo apt-get update 安装桌面完整版ROS sudo apt-get install ros-kinetic-desktop-full Step4.初始化rosdep 在开始使用ROS之前你还需要初始化rosdep..rosdep可以方便在你需要编译某些源码 的时候为其安装一些系统依赖,同时也是某些ROS核心功能组件所必需用到的工具。 sudo rosdep init rosdep update Step5.环境配置 类似于Windows中需要对系统环境变量进行设置添加一些包的路径,在Jbuntu中也需 要进行相应的配置。Ros的自动配置文件为/opt/ros/kinetic/setup.bash,需要将其添加到命 令终端启动时调用的ash会话中,这样每次打开一个新的终端时ROS环境变量都能够自动 配置好,那将会方便很多: echo "source /opt/ros/jade/setup.bash">>~/.bashrc source ~/.bashrc Step6.编译ROS包需要的依赖项安装 安装一些其他的依赖包有助于后续的编译调用等。例如rosinstall是ROS中一 个独立分开的常用命令行工具,它可以方便让你通过一条命令就可以给某个ROS软件包下 载很多源码树。 sudo apt-get install python-rosinstall python-rosinstall-generator pyt hon-wstool build-essential 3.工作空间的创建及环境配置 创建一个工作空间。其中mkdir命令是创建一个文件夹,参数P代表parents,. 表示递归创建目录。cd命令是进入到一个目录。catkin make为编译整个工作空间。 mkdir -p ~/catkin_ws/src cd ~/catkin ws/ catkin_make -5-
- 5 - sudo apt-get update 安装桌面完整版ROS sudo apt-get install ros-kinetic-desktop-full Step4. 初始化 rosdep 在开始使用ROS之前你还需要初始化rosdep。rosdep可以方便在你需要编译某些源码 的时候为其安装一些系统依赖,同时也是某些ROS核心功能组件所必需用到的工具。 sudo rosdep init rosdep update Step5.环境配置 类似于Windows中需要对系统环境变量进行设置添加一些包的路径,在Ubuntu中也需 要进行相应的配置。Ros的自动配置文件为/opt/ros/kinetic/setup.bash,需要将其添加到命 令终端启动时调用的bash会话中,这样每次打开一个新的终端时ROS环境变量都能够自动 配置好,那将会方便很多: echo "source /opt/ros/jade/setup.bash" >> ~/.bashrc source ~/.bashrc Step6.编译ROS包需要的依赖项安装 安装一些其他的依赖包有助于后续的编译调用等。例如rosinstall 是ROS中一 个独立分开的常用命令行工具,它可以方便让你通过一条命令就可以给某个ROS软件包下 载很多源码树。 sudo apt-get install python-rosinstall python-rosinstall-generator pyt hon-wstool build-essential 3.工作空间的创建及环境配置 创建一个工作空间。其中mkdir命令是创建一个文件夹,参数P代表parents, 表示递归创建目录。cd命令是进入到一个目录。catkin_make为编译整个工作空间。 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make