
1.3基于视觉的手势识别 /96 EC680 Kinect:深度照相机 ·基于视觉的手势识别系统,相比于穿戴设备,能够使操 作者以更加自然的方式进行人机交互。 。 是指对视频采集设备拍摄到的包含手势的图像信息,通 过计算机视觉技术进行处理,进而对手势进行识别。 电子种放女学 电子科技大学信息与通信工程学院 6 2019/10/19
电子科技大学 宽带通信网络实验室 信息与通信工程学院 6 2019/10/19 1.3基于视觉的手势识别 Kinect深度照相机 • 基于视觉的手势识别系统,相比于穿戴设备,能够使操 作者以更加自然的方式进行人机交互。 • 是指对视频采集设备拍摄到的包含手势的图像信息,通 过计算机视觉技术进行处理,进而对手势进行识别
两种识别方式的比较 基于可穿戴设备的手势识别 986 √优点在于利用精确的硬件设备可以获得丰富的手势信 息,在各种复杂的背景中不易受到影响: √ 缺点在于需要昂贵的硬件设备,限制了手势的自然表 达方式,降低了用户的舒适度。 > 基于计算机视觉的手势识别 √优点在于不需要高昂的设备,且在操作时也更方便; 困难在于如何在复杂背景下将手势信息检测、分割 出来;类肤色的人脸等其他物体也会在手势分割 段被误分割出来,增加了错误率。 电子州做女望 电子科技大学信息与通信工程学院 2019/10/19
电子科技大学 宽带通信网络实验室 信息与通信工程学院 7 2019/10/19 两种识别方式的比较 基于可穿戴设备的手势识别 优点在于利用精确的硬件设备可以获得丰富的手势信 息,在各种复杂的背景中不易受到影响; 缺点在于需要昂贵的硬件设备,限制了手势的自然表 达方式,降低了用户的舒适度。 基于计算机视觉的手势识别 优点在于不需要高昂的设备,且在操作时也更方便; 困难在于如何在复杂背景下将手势信息检测、分割 出来;类肤色的人脸等其他物体也会在手势分割阶 段被误分割出来,增加了错误率
4 /96 2 基于视觉的手势识别算法 2.1 手势识别流程 2.2 静态手势识别 2.3 动态手势识别 2.4 3D手势识别 电子州做女学 电子科技大学信息与通信工程学院 8 2019/10/19
电子科技大学 宽带通信网络实验室 信息与通信工程学院 8 2019/10/19 2 基于视觉的手势识别算法 2.1 手势识别流程 2.2 静态手势识别 2.3 动态手势识别 2.4 3D手势识别
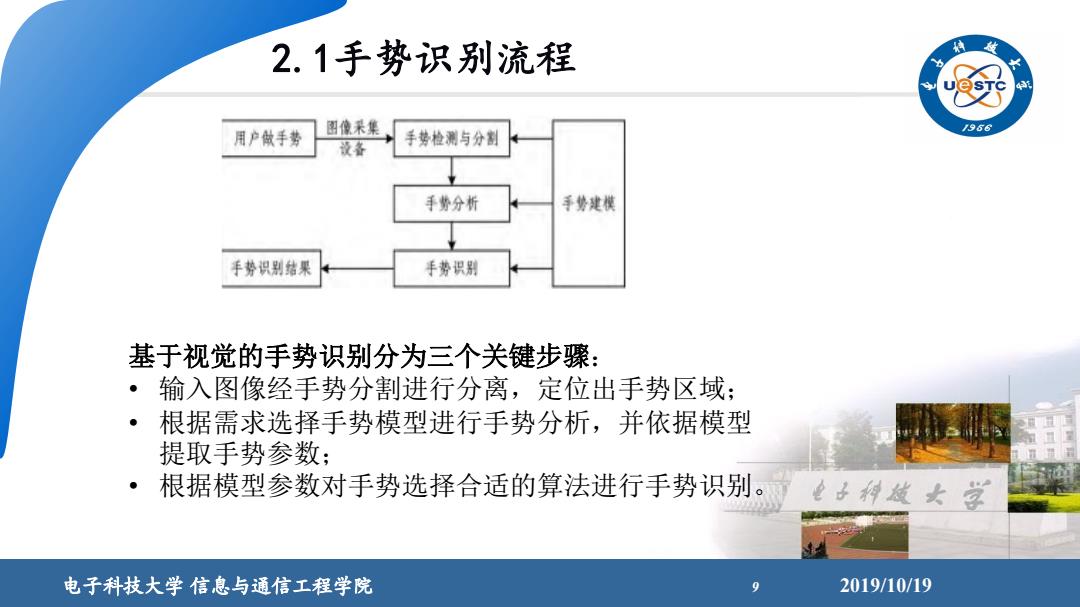
2.1手势识别流程 用户做手势 图像采集 手势检测与分割 /96 设备 手势分析 手势建棋 手势识别结果 手势识别 基于视觉的手势识别分为三个关键步骤: ·输入图像经手势分割进行分离,定位出手势区域: ·根据需求选择手势模型进行手势分析,并依据模型 提取手势参数: ,根据模型参数对手势选择合适的算法进行手势识别。 电子州放女学 电子科技大学信息与通信工程学院 2019/10/19
电子科技大学 宽带通信网络实验室 信息与通信工程学院 9 2019/10/19 2.1手势识别流程 基于视觉的手势识别分为三个关键步骤: • 输入图像经手势分割进行分离,定位出手势区域; • 根据需求选择手势模型进行手势分析,并依据模型 提取手势参数; • 根据模型参数对手势选择合适的算法进行手势识别
手势识别的算法根据输入数据的不同可分为三类 /96 静态手势识别 ·输入单帧的图像,识别手的形态。 动态手势识别 ·输入多帧的图像序列,识别手的二维运动状态。 3D手势识别 利用Kinect摄像头等获得三维的深度图像,将多帧的 深度图像序列作为输入,识别手的三维运动状态。 电子特放女学 电子科技大学信息与通信工程学院 10 2019/10/19
电子科技大学 宽带通信网络实验室 信息与通信工程学院 10 2019/10/19 手势识别的算法根据输入数据的不同可分为三类 静态手势识别 • 输入单帧的图像,识别手的形态。 动态手势识别 • 输入多帧的图像序列,识别手的二维运动状态。 3D手势识别 • 利用Kinect摄像头等获得三维的深度图像,将多帧的 深度图像序列作为输入,识别手的三维运动状态