◆ARPA常用的几种辅助控制方法: 1)设置优先区 0° 315° 45° 270° 90° 图22-6设置优先区
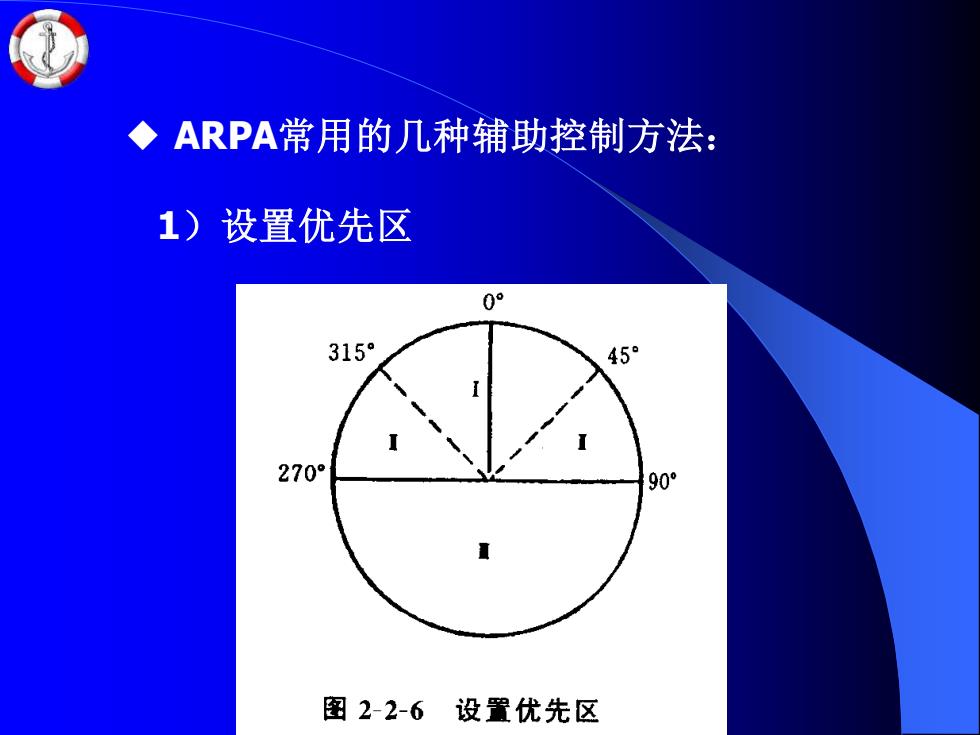
◆ ARPA常用的几种辅助控制方法: 1)设置优先区
2)设置限制线(区): 拒绝录取☒ 0° 限制线1 SHM 限制线2 限制区 岛屿 陆地 陆地 ◆a) b) 图2-2-7设置限制线(区)
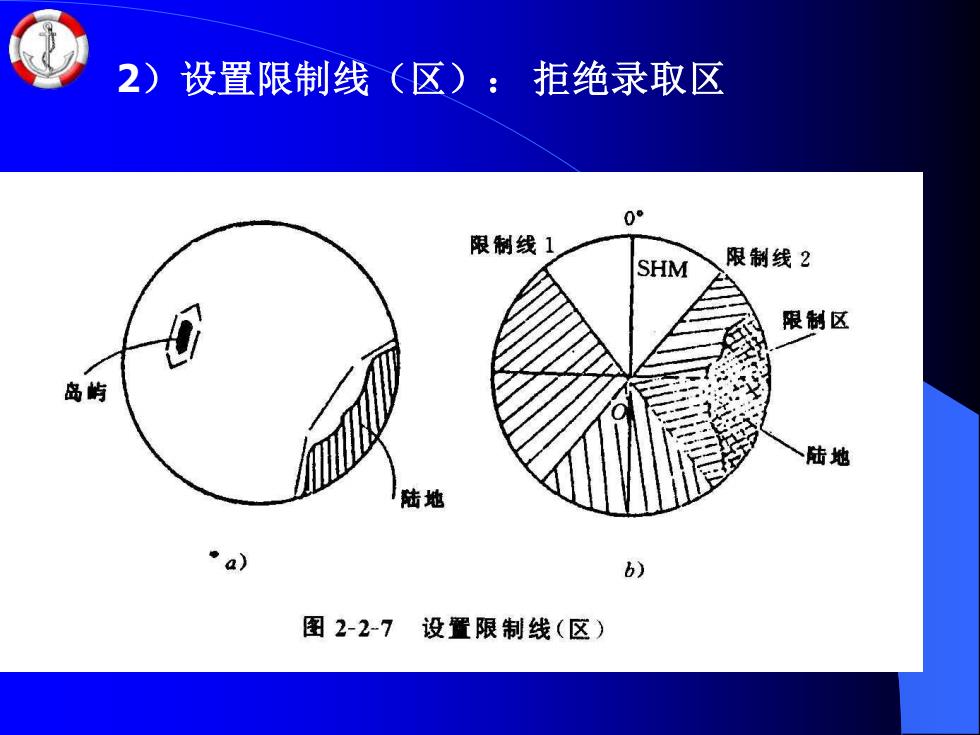
2)设置限制线(区): 拒绝录取区
3)设置警戒圈(环、区) 目标闯人 目标闻入 目标闯入 a b) c》 ●注意: 图2-2-8设置誓戒圈(环、区) 区) 的目标,ARPA不 报警,也不录取!」 ◆功能:对闯入警戒圈(环、区)的目标,ARPA将发 出闯入报警(必有),并自动录取和跟踪(可选择)
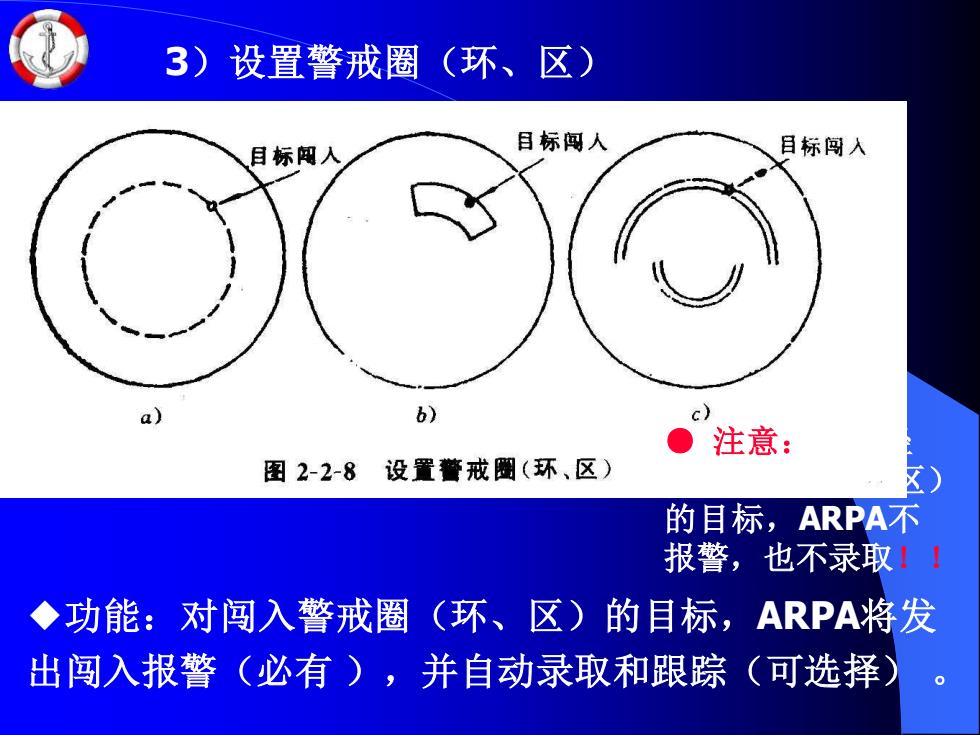
3)设置警戒圈(环、区) ◆功能:对闯入警戒圈(环、区)的目标,ARPA将发 出闯入报警(必有 ),并自动录取和跟踪(可选择) 。 ● 注意:对已经 在警戒圈(环、区) 的目标,ARPA不 报警,也不录取!!
◆自动录取的优点: ①速度快;②减轻驾驶员负担。 ◆自动录取的缺点 ①会造成虚假录取: ②可能漏掉弱小目标的录取; ③可能造成漏录取危险度较大的目标 而酿成危险局面。 ●注意:使用中应根据航 超过规定录取数量, 行环境、态势酌情选用录 ARPA会发出报警 取方式!! (如“0ver20”)
◆自动录取的优点: ①速度快;②减轻驾驶员负担。 ◆自动录取的缺点 ③可能造成漏录取危险度较大的目标 而酿成危险局面。 ①会造成虚假录取 ; ②可能漏掉弱小目标的录取; ● 注意:使用中应根据航 行环境、态势酌情选用录 取方式!! ● 超过规定录取数量, ARPA会发出报警 (如“Over20”)
4、MO规定要求(最低性能标准) 。①人工录取必不可少的,人工录取目标数量, 至少10个; 。②自动录取可有可无的,如有,至少20个: ③应有“人工消除”功能。 。当录取满后,可通过人工消除录取的目标后, 再录取
4、IMO规定要求(最低性能标准): ⚫ ① 人工录取必不可少的,人工录取目标数量, 至少10个; ⚫ ② 自动录取可有可无的,如有,至少20个; ⚫ ③ 应有“人工消除”功能。 ⚫ 当录取满后,可通过人工消除录取的目标后, 再录取