
10.1.2工作于有源逆变状态时 电流断续时电动机的机械特性 ◆电动机机械特性可由下面三个式子准确地得出 Ew=U:cB+0)-sin(B-)e (10-13) 1-e -0 ctgo n=Eu=U:cosn(-B+0-)-sin(-B-)e C'。 -0 ctgo (10-14) C'e 3W2U2 ld= (10-15) 2πZcoso 当电流断续时电动机的机械特性不仅和逆变角有关,而且和电路参数、导通 角等有关系。 11/70
11/70 10.1.2 工作于有源逆变状态时 ■电流断续时电动机的机械特性 ◆电动机机械特性可由下面三个式子准确地得出 ( ) ( ) e e EM U ctg ctg 6 7 6 7 2 1 sin sin 2 cos − − − − + − − − − = ( ) ( ) e e e e M C U C E n ctg ctg 6 7 6 7 2 2 cos sin sin − − − + − − − − = = − − − + = − n U C Z U I e d 2 2 6 2 7 cos 6 7 cos 2 cos 3 2 当电流断续时电动机的机械特性不仅和逆变角有关,而且和电路参数、导通 角等有关系。 (10-13) (10-14) (10-15)

10.1.2工作于有源逆变状态时 ◆图10-5中右下的虚线以左的部分为逆变 电流断续时电动机的机械特性,其特点是: 理想空载转速上翘很多,机械特性变软, 反组变流器 正组变流器 且呈现非线性。 、 ◆逆变状态的机械特性是整流状态的延续, 纵观控制角a由小变大(如π6~ π5/6),电动机的机械特性则逐渐的由第 1象限往下移,进而到达第4象限;第2象 限里也为逆变状态,与它对应的整流状态 a-B- 的机械特性则表示在第3象限里。 ◆第1、第4象限中的特性和第3、第2象限 中的特性是分别属于两组变流器的,它们 输出整流电压的极性彼此相反,故分别标 以正组和反组变流器。 aBaB ◆运行工作点由第1(第3)象限的特性, 转到第2(第4)象限的特性时,表明电动 图10-5电动机在四象限中的机械特性 机由电动运行转入发电制动运行;相应的 变流器的工况由整流转为逆变。 12/70
12/70 10.1.2 工作于有源逆变状态时 反组变流器 正组变流器 n 3 2 1 I d 4 2 3 4 1 = = 2 '= '= 2 ' 3 ' 2 ' 1 ' 4 ' 2 ' 3 ' 4 ' 1 1 = ' 1 ; ' 1 = 1 2 = ' 2 ; ' 2 = 2 '增大方向 '增大方向 增大方向 增大方向 图10-5 电动机在四象限中的机械特性 ◆图10-5中右下的虚线以左的部分为逆变 电流断续时电动机的机械特性,其特点是: 理想空载转速上翘很多,机械特性变软, 且呈现非线性。 ◆逆变状态的机械特性是整流状态的延续, 纵观控制角由小变大(如/6~ 5/6),电动机的机械特性则逐渐的由第 1象限往下移,进而到达第4象限;第2象 限里也为逆变状态,与它对应的整流状态 的机械特性则表示在第3象限里。 ◆第1、第4象限中的特性和第3、第2象限 中的特性是分别属于两组变流器的,它们 输出整流电压的极性彼此相反,故分别标 以正组和反组变流器。 ◆运行工作点由第1(第3)象限的特性, 转到第2(第4)象限的特性时,表明电动 机由电动运行转入发电制动运行;相应的 变流器的工况由整流转为逆变
10.1.3直流可逆电力拖动系统 ■直流可逆电力拖动系统 正组 ◆电路结构 本本 r图10-6a是有环流接线, 图10-6b是无环流接线,环流是 本本本 本本本 反组 指只在两组变流器之间流动而 正组 反组 不经过负载的电流。 a) 6创 r根据电动机所需的运转 正转逆变山 。正E转整流 状态来决定哪一组变流器工作 电能 皮电网电网床 电能 及其相应的工作状态:整流或 EM(M M E 逆变。 正组U ◆四象限运行时的工作情况 发电运行 电动运行 r第1象限,正转,电动机 + 反转整流a 4反转逆变 作电动运行,正组桥工作在整 流状态,a元/2,EMUa(下 本 电能 电网术 电能 标中有a表示整流,下标1表示 反组 正组 反组 正组桥,下标2表示反组桥)。 电动运行 发电运行 图10-6两组变流器的反并联可逆线路 13/70
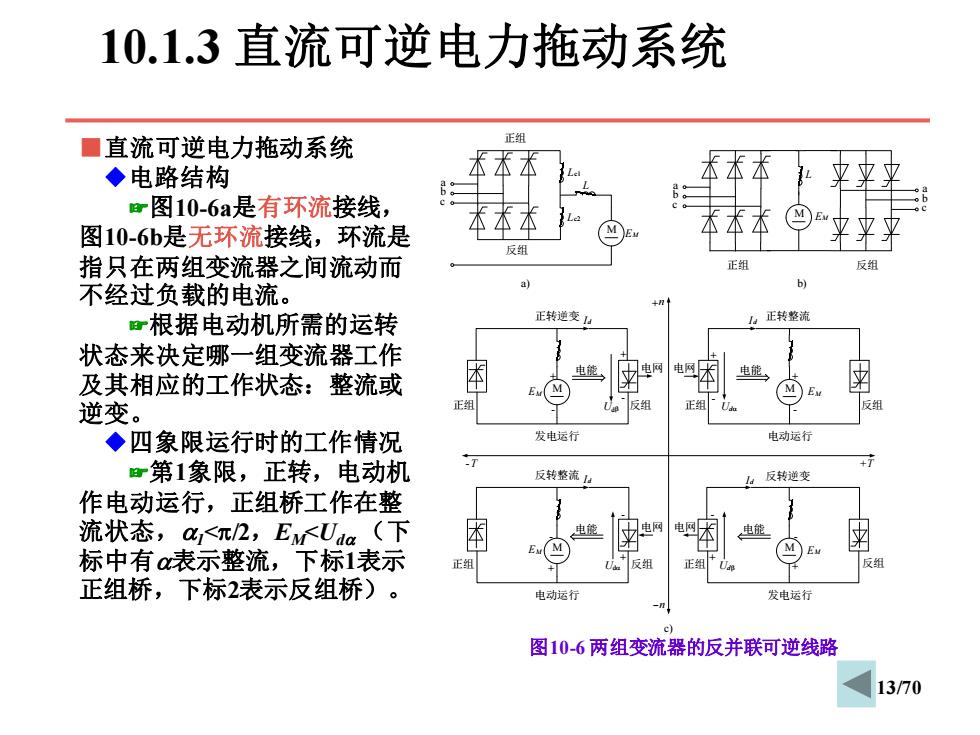
13/70 ■直流可逆电力拖动系统 ◆电路结构 ☞图10-6a是有环流接线, 图10-6b是无环流接线,环流是 指只在两组变流器之间流动而 不经过负载的电流。 ☞根据电动机所需的运转 状态来决定哪一组变流器工作 及其相应的工作状态:整流或 逆变。 ◆四象限运行时的工作情况 ☞第1象限,正转,电动机 作电动运行,正组桥工作在整 流状态,1</2,EM<Ud (下 标中有表示整流,下标1表示 正组桥,下标2表示反组桥)。 10.1.3 直流可逆电力拖动系统 M M 正组 反组 正组 Lc1 L Lc2 L EM EM a b c a b c a b c a) b) EM M M EM EM M M EM + - + - + - + - + - + - + - + - 电能 电能 电能 电网 电网 电能 电网 电网 +n -n Id Id Id Id 正组 反组 正组 反组 正组 反组 正组 反组 -T +T Ud Ud Ud Ud 正转整流 反转整流 正转逆变 反转逆变 电动运行 电动运行 发电运行 发电运行 c) 反组 图10-6 两组变流器的反并联可逆线路
10.1.3直流可逆电力拖动系统 正组 m第2象限,正转,电动机作 本本本 发电运行,反组桥工作在逆 变状态,B2<π2(a2π2), 反组 EM-Uap(下标中有俵示逆 π正组 反组 a b) 变)。 正转逆变1 正转整流 r第3象限,反转,电动机作 电能 电 电 电能 电动运行,反组桥工作在整 正组 反组 流状态,a2<π2,EM<Uda°。 发电运行 电动运行 反转整流山 4反转逆变 m第4象限,反转,电动机作 发电运行,正组桥工作在逆 电能 电能 E M E 变状态,B<π/2(aπ2), 反组 正组 反组 EMUdB 电动运行 发电运行 图10-6两组变流器的反并联可逆线路 14/70
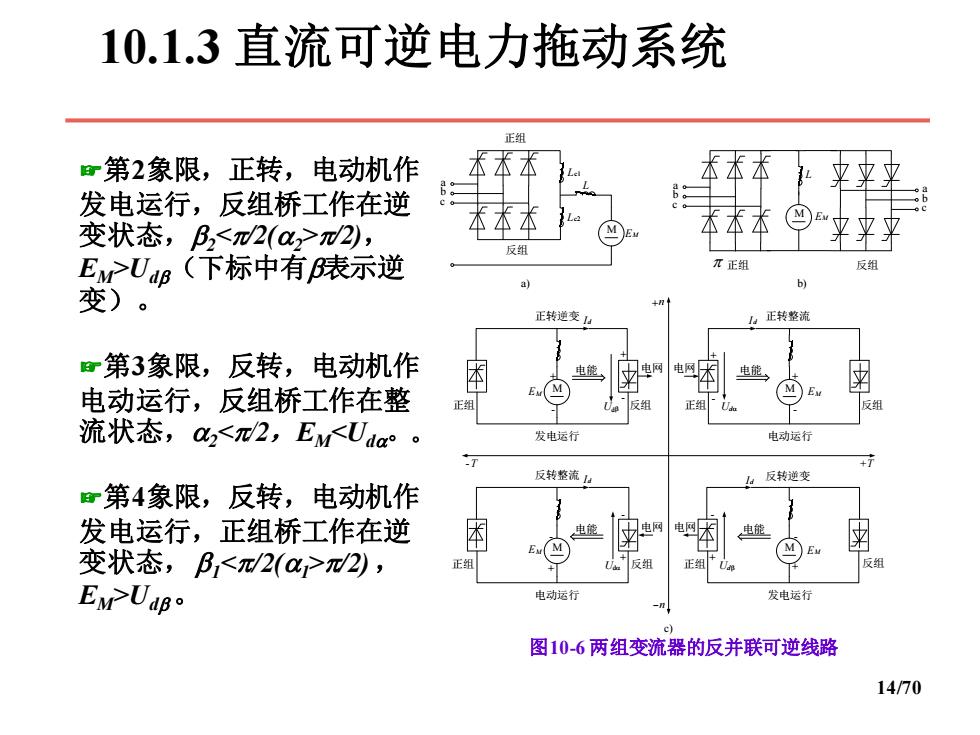
14/70 ☞第2象限,正转,电动机作 发电运行,反组桥工作在逆 变状态,2</2(2>/2), EM>Ud(下标中有表示逆 变)。 ☞第3象限,反转,电动机作 电动运行,反组桥工作在整 流状态,2</2,EM<Ud。 ☞第4象限,反转,电动机作 发电运行,正组桥工作在逆 变状态,1</2(1>/2), EM>Ud。 10.1.3 直流可逆电力拖动系统 M M 正组 反组 正组 Lc1 L Lc2 L EM EM a b c a b c a b c a) b) EM M M EM EM M M EM + - + - + - + - + - + - + - + - 电能 电能 电能 电网 电网 电能 电网 电网 +n -n Id Id Id Id 正组 反组 正组 反组 正组 反组 正组 反组 -T +T Ud Ud Ud Ud 正转整流 反转整流 正转逆变 反转逆变 电动运行 电动运行 发电运行 发电运行 c) 反组 图10-6 两组变流器的反并联可逆线路

10.1.3直流可逆电力拖动系统 ◆直流可逆拖动系统,能方便地实 现正反向运转外,还能实现回馈制 正转逆变。 山正转整流 动。 ©由正转到反转的过程 电网 电网长 电能 √从1组桥切换到2组桥工作,并 反组 要求2组桥在逆变状态下工作,电动 正 机进入第2象限(之前运行在第1象 发电运行 电动运行 限)作正转发电运行,电磁转矩变 反转整流, 山反转逆变 成制动转矩,电动机轴上的机械能 经2组桥逆变为交流电能回馈电网。 电网 V改变2组桥的逆变角B,使之由 小变大直至π2(n=0),如继续 反组增大B,即心π2,2组桥将转入整流 电动运行 发电运行 状态下工作,电动机开始反转进入 第3象限的电动运行。 电动机从反转到正转,其过程 图10-6(c) 则由第3象限经第4象限最终运行在 第1象限上。 15/70
15/70 10.1.3 直流可逆电力拖动系统 EM M M EM EM M M EM + - + - + - + - + - + - + - + - 电能 电能 电能 电网 电网 电能 电网 电网 -n Id Id Id Id 正组 反组 正组 反组 正组 反组 正组 反组 -T +T Ud Ud Ud Ud 正转整流 反转整流 正转逆变 反转逆变 电动运行 电动运行 发电运行 发电运行 c) 图10-6 (c) ◆直流可逆拖动系统,能方便地实 现正反向运转外,还能实现回馈制 动。 ☞由正转到反转的过程 √从1组桥切换到2组桥工作,并 要求2组桥在逆变状态下工作,电动 机进入第2象限(之前运行在第1象 限)作正转发电运行,电磁转矩变 成制动转矩,电动机轴上的机械能 经2组桥逆变为交流电能回馈电网。 √改变2组桥的逆变角,使之由 小变大直至=/2(n=0),如继续 增大,即</2,2组桥将转入整流 状态下工作,电动机开始反转进入 第3象限的电动运行。 ☞电动机从反转到正转,其过程 则由第3象限经第4象限最终运行在 第1象限上