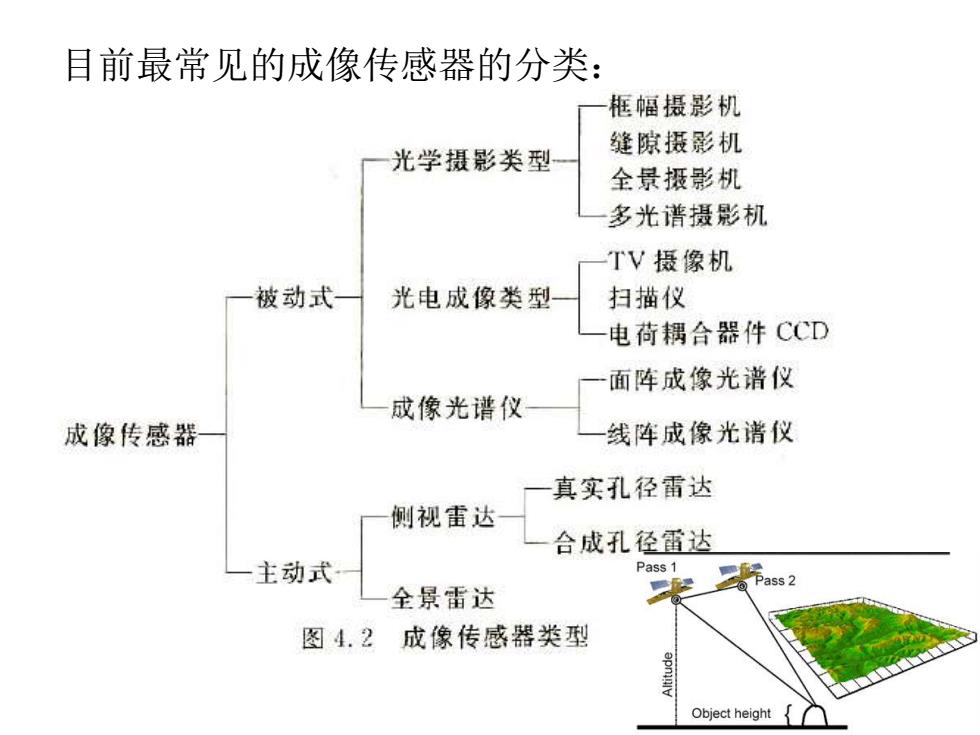
目前最常见的成像传感器的分类: 框幅摄影机 缝隙摄影机 光学摄影类型 全景摄影机 多光谱摄影机 TV摄像机 被动式 光电成像类型 扫描仪 电荷耦合器件CCD 面阵成像光谱仪 成像光谱仪 成像传感器 线阵成像光谱仪 真实孔径雷达 侧视雷达 合成孔径雷达 主动式 Pass 1 ass 2 全景雷达 图4.2 成像传感器类型 Object height
目前最常见的成像传感器的分类:
4.2传感器的性能 最具实用意义的性能指标是传感器的分辨率, 包括空间、时间、光谱、温度分辨率。 (一)空间分辨率 ·指遥感图像上能够详细区分的最小单元的尺寸或大 小,通常用像元(像素)大小、像解率或视场角表 示。是像素所代表的地面范围的大小,或地面物体 能分辨的最小单元,用来表征分辨目标细节能力的 指标。 ·像元(pixel),单位:米,越小空间分辨率越高;
4.2 传感器的性能 最具实用意义的性能指标是传感器的分辨率, 包括空间、时间、光谱、温度分辨率。 • (一)空间分辨率 • 指遥感图像上能够详细区分的最小单元的尺寸或大 小,通常用像元(像素)大小、像解率或视场角表 示。是像素所代表的地面范围的大小,或地面物体 能分辨的最小单元,用来表征分辨目标细节能力的 指标。 • 像元(pixel),单位:米,越小空间分辨率越高;

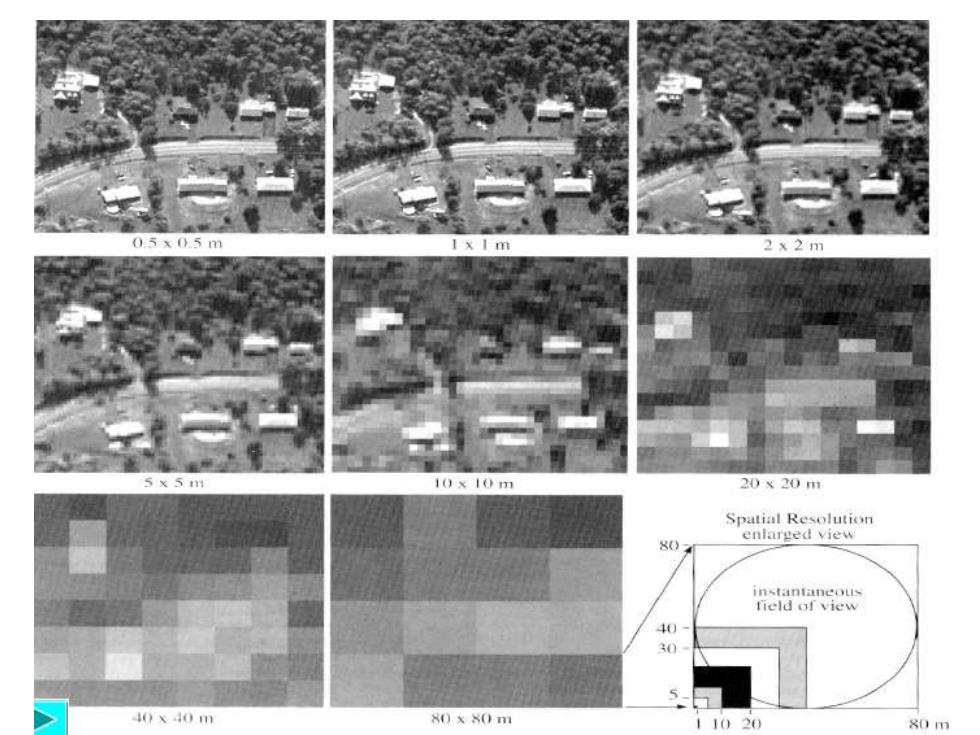
·像解率:单位尺寸里能分辨的平行细线的条数, 线/毫米或线对/毫米 。视场角:传感器在某个瞬间的视域,又叫传感器 的角分辨率。 瞬时视场是指在扫描成像 过程,一个光敏探测元件 通过望远镜系统投影到地 面上的直径或边长。 分辨率(像元大小)=平台高度*角分辨率(弧度) D=H IFOV
• 像解率:单位尺寸里能分辨的平行细线的条数, 线/毫米或线对/毫米 • 视场角:传感器在某个瞬间的视域,又叫传感器 的角分辨率。 • 瞬时视场是指在扫描成像 过程,一个光敏探测元件 通过望远镜系统投影到地 面上的直径或边长
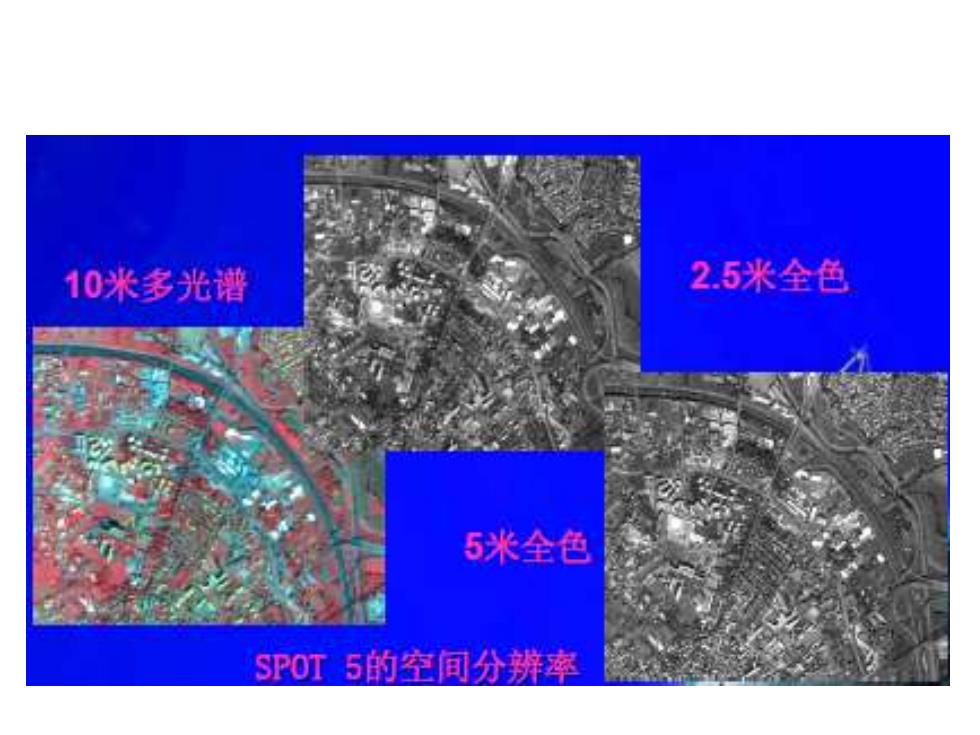
10米多光潜 2.5米全色 5米全色 SPOT5的空间分辨率
0.5x0.5m 2 x 2m 5×511 10x1(m 20×20m Spatial Resolution enlarged view 80 instnuineous field of view 40 30 40x40m 8)x8(0四 1102) 80m