6 第9章机器学习与和识发现 9.2.2示例学习 示例学习也称实例学习,它是一种归纳学习。示例学习 是从若干实例(包括正例和反例)中归纳出一般概念或规则的 学习方法。例如学习程序要学习“狗”的概念,可以先提供 给程序以各种动物,并告知程序哪些动物是“狗”,哪些不 是“狗”,系统学习后便概括出“狗”的概念模型或类型定 义,利用这个类型定义就可作为动物世界中识别“狗”的分 类的准则。这种构造类型定义的任务称为概念学习,当然这 个任务所使用的技术必须依赖于描述类型(概念)的方法。下 面我们使用Winston(1975年开发)提出的结构化概念学习程 序的例子作为模型来说明示例学习的过程
第 9 章 机器学习与知识发现 9 9.2.2 示例学习也称实例学习, 它是一种归纳学习。示例学习 是从若干实例(包括正例和反例)中归纳出一般概念或规则的 学习方法。 例如学习程序要学习“狗”的概念, 可以先提供 给程序以各种动物, 并告知程序哪些动物是“狗” , 哪些不 是“狗” , 系统学习后便概括出“狗”的概念模型或类型定 义, 利用这个类型定义就可作为动物世界中识别“狗”的分 类的准则。 这种构造类型定义的任务称为概念学习, 当然这 个任务所使用的技术必须依赖于描述类型(概念)的方法。 下 面我们使用Winston(1975年开发) 提出的结构化概念学习程 序的例子作为模型来说明示例学习的过程
第9章机器学习与知识发现 Winston的程序是在简单的积木世界领域中运行,其目的 是要建立积木世界中物体概念定义的结构化表示,例如学习房 子、帐篷和拱的概念,构造出这些概念定义的结构化描述。 系统的输入是积木世界某物体(或景象)的线条图,使用 语义网络来表示该物体结构化的描述。例如系统要学习拱桥 概念,就给学习程序输入第一个拱桥示例,得到的描述如图 9-6所示,这个结构化的描述就是拱桥概念的定义。接着再向 程序输入第二个拱桥示例,其描述如图9-7所示。这时学习 程序可归纳出如图9-8所示的描述
第 9 章 机器学习与知识发现 9 Winston的程序是在简单的积木世界领域中运行,其目的 是要建立积木世界中物体概念定义的结构化表示,例如学习房 子、帐篷和拱的概念,构造出这些概念定义的结构化描述。 系统的输入是积木世界某物体(或景象)的线条图, 使用 语义网络来表示该物体结构化的描述。例如系统要学习拱桥 概念, 就给学习程序输入第一个拱桥示例,得到的描述如图 9-6所示,这个结构化的描述就是拱桥概念的定义。接着再向 程序输入第二个拱桥示例, 其描述如图 9-7所示。这时学习 程序可归纳出如图 9-8所示的描述
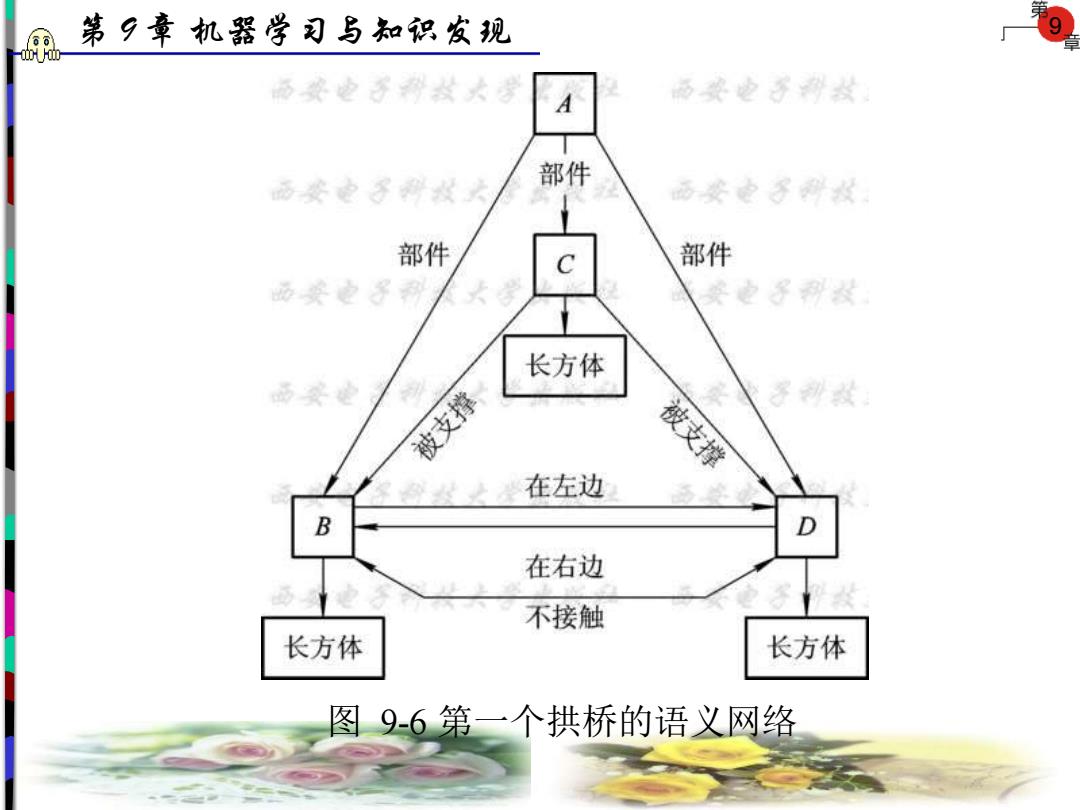
第9章机器学习与知积发现 9 而终地子科技大罗 N 西终地子科发 西安电子形发大 部件 西安电子科收 部件 C 部件 安电子科 长方体 西妥地 被支撑 子利风 被支撑 在左边 B 在右边 不接触 长方体 长方体 图9-6第一个拱桥的语义网络
第 9 章 机器学习与知识发现 9 图 9-6 第一个拱桥的语义网络
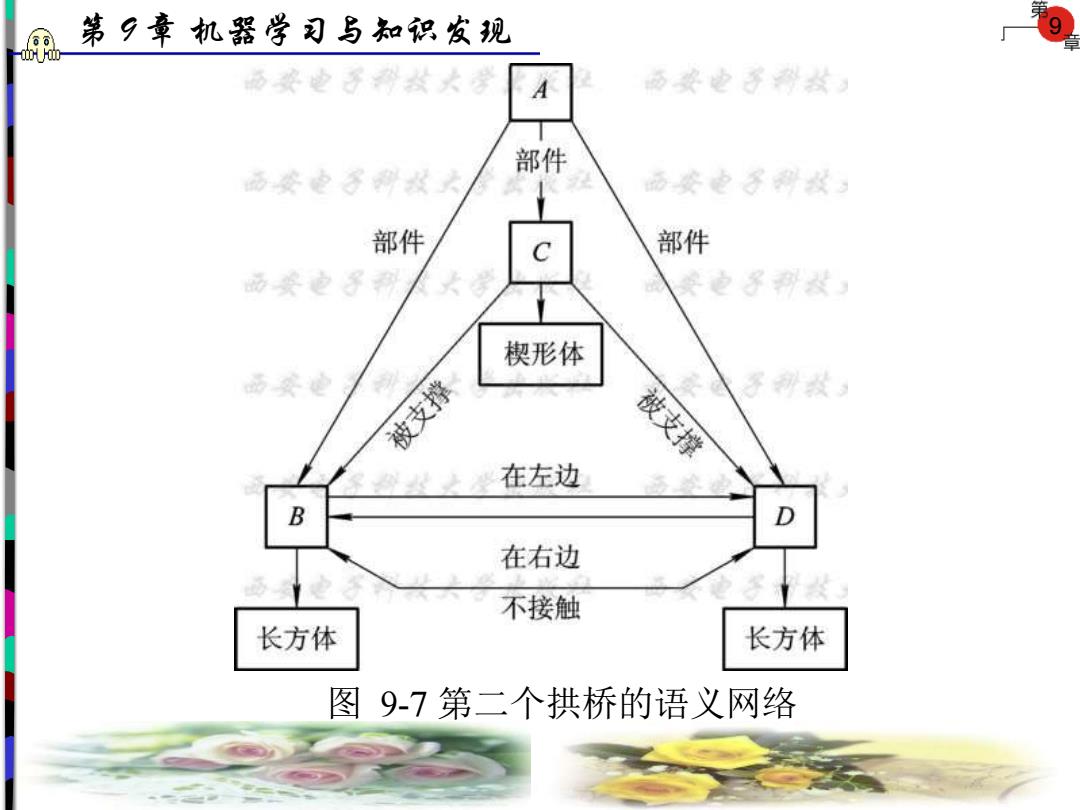
第 第9章机器学习与知积发现 9 而奖地子价技大学 西安地子科技 部件 西姿的子得及大 西安也子得收 部件 部件 西电子科人大号 、要电子到 楔形体 西安地 被支撑 安小 子利发 被支撑 在左边 B 在右边 不接触 长方体 长方体 图9-7第二个拱桥的语义网络
第 9 章 机器学习与知识发现 9 图 9-7 第二个拱桥的语义网络
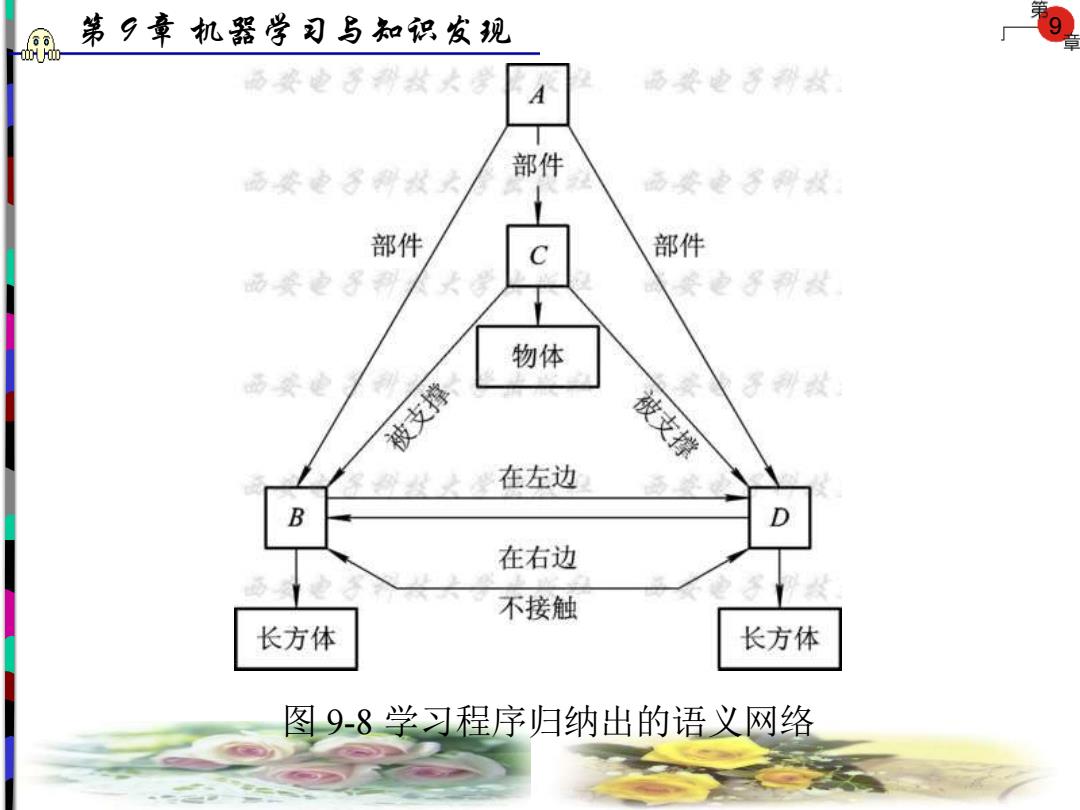
第9章机器学习与知积发现 9 西姿地子孙技大学 A 西终地子孙 西安电子科技大 部件 西安电子风 部件 C 部件 安也子科发 物体 西安地 被支撑 、子利 被支撑 在左边 B 在右边 不接触 长方体 长方体 图9-8学习程序归纳出的语义网络
第 9 章 机器学习与知识发现 9 图 9-8 学习程序归纳出的语义网络