自适应性主动式下肢假肢仿生控制方法研究 能的力矩模式存储于单片机当中,根据不同的步行速度采用不同的力矩模式:对最佳 的步态进行记忆,并应用于日常的步态当中1叨。 中南大学谭冠政教授研制出了智能仿生人工腿CIP-lLg(如图1.4所示),是国 内首个智能仿生人工腿原型机。设计出的智能仿生人工腿可以模拟出人体的正常步态 行走运动模式,假肢可以做到对健肢的自然、随时、任意的跟随。采用MSP430F149 低功耗微处理器,可以有效的解决假肢的低功耗和抗干扰性能,同时提高了假肢控制 的精度20,21 膝关节体上盖 制动块 膝关节体 弧形小盖板一 小腿壳体 气缸一 电路板 位置传感器 电机组件 电池包 a)样机1b)样机2c)样机3d)样机4c)样机5 图1.4CP-ILeg膝关节结构图 图1.5智能假肢膝关节原型样机 河北工业大学假肢课题组在杨鹏教授的带领下,先后承担国家级及省市级“智能 下肢假肢”相关课题8项,完成了对人体表面肌电信号的采集、分析和识别:对人体 下肢的运动信息进行了采集,可以完成对人体的不同运动模式识别:研制的智能汽压 膝关节原型样机(如图1.5所示),可以很好的实现假肢对健肢的跟随,并且步态协调 自然,填补了我国在智能下肢假肢研究领域的空白,在下肢的支撑期和摆动期控制方 面达到国际领先水平2。 东北大学徐心和教授带领的团队,通过对智能假肢的发展趋势进行研究,将BLP 的概念引入到假肢的控制中,过对假肢的常见控制方法如基于有限状态机的步态控制 方法和基于生物信号的仿生控制方法等假肢控制方法进行分析,对生物信息和传感信 息的融合进行了探讨,为智能假肢的发展指明了方向。 -4- 万方数据
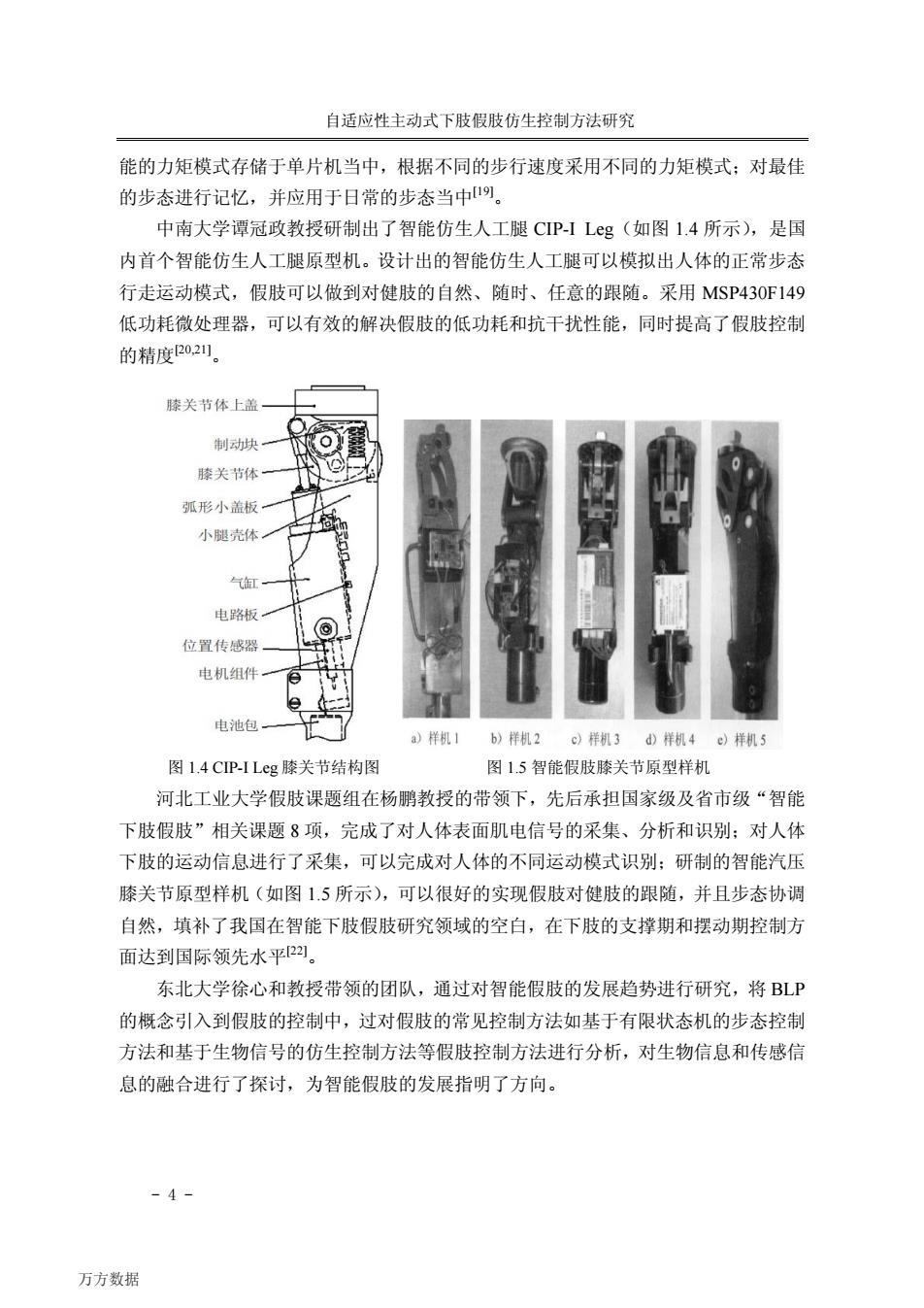
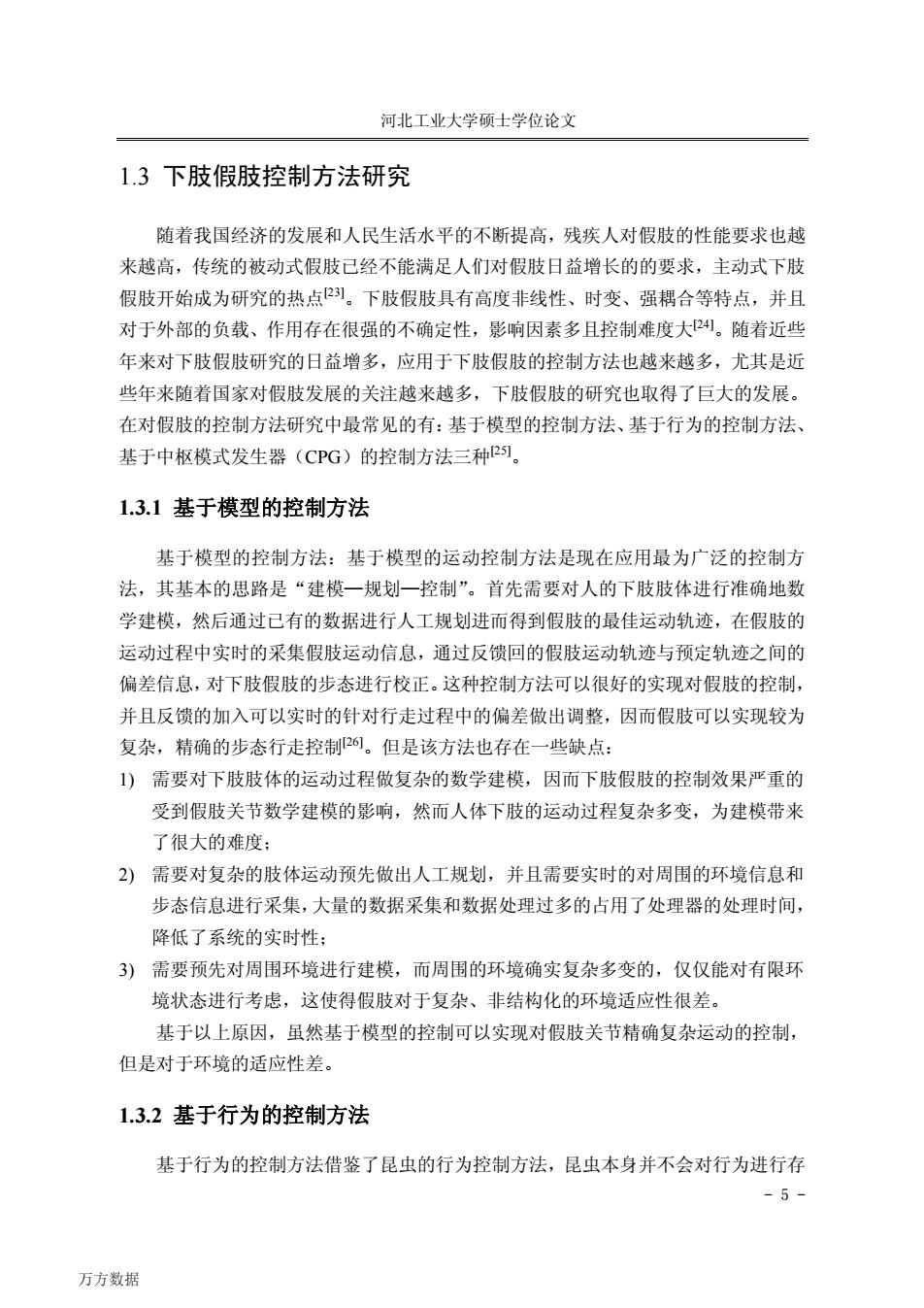
自适应性主动式下肢假肢仿生控制方法研究 - 4 - 能的力矩模式存储于单片机当中,根据不同的步行速度采用不同的力矩模式;对最佳 的步态进行记忆,并应用于日常的步态当中[19]。 中南大学谭冠政教授研制出了智能仿生人工腿 CIP-I Leg(如图 1.4 所示),是国 内首个智能仿生人工腿原型机。设计出的智能仿生人工腿可以模拟出人体的正常步态 行走运动模式,假肢可以做到对健肢的自然、随时、任意的跟随。采用 MSP430F149 低功耗微处理器,可以有效的解决假肢的低功耗和抗干扰性能,同时提高了假肢控制 的精度[20,21]。 图 1.4 CIP-I Leg 膝关节结构图 图 1.5 智能假肢膝关节原型样机 河北工业大学假肢课题组在杨鹏教授的带领下,先后承担国家级及省市级“智能 下肢假肢”相关课题 8 项,完成了对人体表面肌电信号的采集、分析和识别;对人体 下肢的运动信息进行了采集,可以完成对人体的不同运动模式识别;研制的智能汽压 膝关节原型样机(如图 1.5 所示),可以很好的实现假肢对健肢的跟随,并且步态协调 自然,填补了我国在智能下肢假肢研究领域的空白,在下肢的支撑期和摆动期控制方 面达到国际领先水平[22]。 东北大学徐心和教授带领的团队,通过对智能假肢的发展趋势进行研究,将 BLP 的概念引入到假肢的控制中,过对假肢的常见控制方法如基于有限状态机的步态控制 方法和基于生物信号的仿生控制方法等假肢控制方法进行分析,对生物信息和传感信 息的融合进行了探讨,为智能假肢的发展指明了方向。 万方数据
河北工业大学硕士学位论文 1.3下肢假肢控制方法研究 随着我国经济的发展和人民生活水平的不断提高,残疾人对假肢的性能要求也越 来越高,传统的被动式假肢已经不能满足人们对假肢日益增长的的要求,主动式下肢 假肢开始成为研究的热点2]。下肢假肢具有高度非线性、时变、强耦合等特点,并且 对于外部的负载、作用存在很强的不确定性,影响因素多且控制难度大24。随着近些 年来对下肢假肢研究的日益增多,应用于下肢假肢的控制方法也越来越多,尤其是近 些年来随着国家对假肢发展的关注越来越多,下肢假肢的研究也取得了巨大的发展。 在对假肢的控制方法研究中最常见的有:基于模型的控制方法、基于行为的控制方法、 基于中枢模式发生器(CPG)的控制方法三种P。 1.3.1基于模型的控制方法 基于模型的控制方法:基于模型的运动控制方法是现在应用最为广泛的控制方 法,其基本的思路是“建模一规划一控制”。首先需要对人的下肢肢体进行准确地数 学建模,然后通过已有的数据进行人工规划进而得到假肢的最佳运动轨迹,在假肢的 运动过程中实时的采集假肢运动信息,通过反馈回的假肢运动轨迹与预定轨迹之间的 偏差信息,对下肢假肢的步态进行校正。这种控制方法可以很好的实现对假肢的控制, 并且反馈的加入可以实时的针对行走过程中的偏差做出调整,因而假肢可以实现较为 复杂,精确的步态行走控制2。但是该方法也存在一些缺点: 1)需要对下肢肢体的运动过程做复杂的数学建模,因而下肢假肢的控制效果严重的 受到假肢关节数学建模的影响,然而人体下肢的运动过程复杂多变,为建模带来 了很大的难度: 2)需要对复杂的肢体运动预先做出人工规划,并且需要实时的对周围的环境信息和 步态信息进行采集,大量的数据采集和数据处理过多的占用了处理器的处理时间, 降低了系统的实时性: 3)需要预先对周围环境进行建模,而周围的环境确实复杂多变的,仅仅能对有限环 境状态进行考虑,这使得假肢对于复杂、非结构化的环境适应性很差。 基于以上原因,虽然基于模型的控制可以实现对假肢关节精确复杂运动的控制, 但是对于环境的适应性差。 1.3.2基于行为的控制方法 基于行为的控制方法借鉴了昆虫的行为控制方法,昆虫本身并不会对行为进行存 -5- 万方数据
河北工业大学硕士学位论文 - 5 - 1.3 下肢假肢控制方法研究 随着我国经济的发展和人民生活水平的不断提高,残疾人对假肢的性能要求也越 来越高,传统的被动式假肢已经不能满足人们对假肢日益增长的的要求,主动式下肢 假肢开始成为研究的热点[23]。下肢假肢具有高度非线性、时变、强耦合等特点,并且 对于外部的负载、作用存在很强的不确定性,影响因素多且控制难度大[24]。随着近些 年来对下肢假肢研究的日益增多,应用于下肢假肢的控制方法也越来越多,尤其是近 些年来随着国家对假肢发展的关注越来越多,下肢假肢的研究也取得了巨大的发展。 在对假肢的控制方法研究中最常见的有:基于模型的控制方法、基于行为的控制方法、 基于中枢模式发生器(CPG)的控制方法三种[25]。 1.3.1 基于模型的控制方法 基于模型的控制方法:基于模型的运动控制方法是现在应用最为广泛的控制方 法,其基本的思路是“建模—规划—控制”。首先需要对人的下肢肢体进行准确地数 学建模,然后通过已有的数据进行人工规划进而得到假肢的最佳运动轨迹,在假肢的 运动过程中实时的采集假肢运动信息,通过反馈回的假肢运动轨迹与预定轨迹之间的 偏差信息,对下肢假肢的步态进行校正。这种控制方法可以很好的实现对假肢的控制, 并且反馈的加入可以实时的针对行走过程中的偏差做出调整,因而假肢可以实现较为 复杂,精确的步态行走控制[26]。但是该方法也存在一些缺点: 1) 需要对下肢肢体的运动过程做复杂的数学建模,因而下肢假肢的控制效果严重的 受到假肢关节数学建模的影响,然而人体下肢的运动过程复杂多变,为建模带来 了很大的难度; 2) 需要对复杂的肢体运动预先做出人工规划,并且需要实时的对周围的环境信息和 步态信息进行采集,大量的数据采集和数据处理过多的占用了处理器的处理时间, 降低了系统的实时性; 3) 需要预先对周围环境进行建模,而周围的环境确实复杂多变的,仅仅能对有限环 境状态进行考虑,这使得假肢对于复杂、非结构化的环境适应性很差。 基于以上原因,虽然基于模型的控制可以实现对假肢关节精确复杂运动的控制, 但是对于环境的适应性差。 1.3.2 基于行为的控制方法 基于行为的控制方法借鉴了昆虫的行为控制方法,昆虫本身并不会对行为进行存 万方数据
自适应性主动式下肢假肢仿生控制方法研究 储、规划和控制,当身体的某一部分受到外界的刺激后,会将自身的一些简单动作进 行合成。因为假肢的动作可以看作很多简单动作的合成,利用外部传感器获取当前的 步态信息,根据获取到的信息对动作进行判断,控制下肢假肢的动作并将简单的动作 进行合成调节下肢假肢的整体运动,完成对外部信息的响应2刀。这种控制方法虽然很 好的避免了对肢体运动过程的规划,但是依然存在局限性: 1)不能提前对步态动作做出全局的规划,因而也就不能保证动作实现的最优,控制 效果的最好: 2)当执行的动作比较复杂时,各种简单行为会相互交替叠加,假肢关节的整体行为 难以控制。 1.3.3基于中枢模式发生器的控制方法 基于中枢模式发生器(CPG)的假肢控制方法,是一种模拟生物低级神经中枢的 自激行为,进而产生节律运动的控制方法。对于生物体来讲,很多运动属于模式运动 的范畴,例如步态行走、呼吸、心跳等。从生物肢体运动的机理出发,构建CPG的 数学模型并将其应用于对假肢的控制,成为现在对假肢控制的一个热点研究方向 [28-3,其本身具有如下的优点: 1)使用自适应的自激振荡器构建CPG振荡器网络,振荡器之间通过相位互锁产生稳 定的输出控制信号,进而产生稳定的假肢控制信号,并且即使在缺乏高层信号调 节和外部反馈信息的情况下,依旧可以产生稳定的可用于假肢控制自激振荡信号: 2)高层控制信号可以对CPG振荡器网络进行参数调节,根据捕获到的外部反馈信号 的改变调整CPG振荡器网络的参数,进而实现对输出下肢假肢控制信号进行调 整; 3)振荡器网络结构简单,可以通过学习训练实现对正常步态信号学习的目的,摆脱 了对肢体关节建模准确性的依赖,因而系统具有更好的学习适应能力: 4)在步态行走过程中,将步态行走看作是一种节律运动,通过振荡器的自激振荡产 生假肢控制信号,避免了对外部信号的大量数据采集和处理,增强了系统的实时 性。 因为以上诸多的优点,CPG首先在机器人控制领域上得到快速地发展和应用,而 对于假肢的控制也可以借鉴机器人的控制方法,如何将基于中枢模式发生器的控制方 法应用于对人体下肢假肢的控制,更好的控制下肢假肢的步态,是本课题需要进行的 研究。 -6- 万方数据
自适应性主动式下肢假肢仿生控制方法研究 - 6 - 储、规划和控制,当身体的某一部分受到外界的刺激后,会将自身的一些简单动作进 行合成。因为假肢的动作可以看作很多简单动作的合成,利用外部传感器获取当前的 步态信息,根据获取到的信息对动作进行判断,控制下肢假肢的动作并将简单的动作 进行合成调节下肢假肢的整体运动,完成对外部信息的响应[27]。这种控制方法虽然很 好的避免了对肢体运动过程的规划,但是依然存在局限性: 1) 不能提前对步态动作做出全局的规划,因而也就不能保证动作实现的最优,控制 效果的最好; 2) 当执行的动作比较复杂时,各种简单行为会相互交替叠加,假肢关节的整体行为 难以控制。 1.3.3 基于中枢模式发生器的控制方法 基于中枢模式发生器(CPG)的假肢控制方法,是一种模拟生物低级神经中枢的 自激行为,进而产生节律运动的控制方法。对于生物体来讲,很多运动属于模式运动 的范畴,例如步态行走、呼吸、心跳等。从生物肢体运动的机理出发,构建 CPG 的 数学模型并将其应用于对假肢的控制,成为现在对假肢控制的一个热点研究方向 [28-32],其本身具有如下的优点: 1) 使用自适应的自激振荡器构建 CPG 振荡器网络,振荡器之间通过相位互锁产生稳 定的输出控制信号,进而产生稳定的假肢控制信号,并且即使在缺乏高层信号调 节和外部反馈信息的情况下,依旧可以产生稳定的可用于假肢控制自激振荡信号; 2) 高层控制信号可以对 CPG 振荡器网络进行参数调节,根据捕获到的外部反馈信号 的改变调整 CPG 振荡器网络的参数,进而实现对输出下肢假肢控制信号进行调 整; 3) 振荡器网络结构简单,可以通过学习训练实现对正常步态信号学习的目的,摆脱 了对肢体关节建模准确性的依赖,因而系统具有更好的学习适应能力; 4) 在步态行走过程中,将步态行走看作是一种节律运动,通过振荡器的自激振荡产 生假肢控制信号,避免了对外部信号的大量数据采集和处理,增强了系统的实时 性。 因为以上诸多的优点,CPG 首先在机器人控制领域上得到快速地发展和应用,而 对于假肢的控制也可以借鉴机器人的控制方法,如何将基于中枢模式发生器的控制方 法应用于对人体下肢假肢的控制,更好的控制下肢假肢的步态,是本课题需要进行的 研究。 万方数据
河北工业大学硕士学位论文 1.4课题主要研究内容 第一章“绪论”介绍课题研究的背景和意义,对国内外假肢的发展现状做简要介 绍,在对下肢假肢控制方法研究的基础上,提出基于中枢模式发生器的下肢假肢仿生 控制方法。 第二章“下肢运动信号的采集与分析”对人体下肢的膝关节运动信息进行采集分 析,对上斜坡、下斜坡、上楼梯、下楼梯和平地行走等常见的五种路况的步态进行分 析,为进一步的CPG振荡器网络的搭建提供数据基础。 第三章“基于CPG仿生控制方法研究”介绍CPG网络的基本构成振荡器,对振 荡器的基本特性进行分析并加以改进,用若干自适应的非线性振荡器组成CPG网络 并对网络进行学习训练,从而得到振荡器网络在特定步态下的网络参数,使用Matlab 进行仿真分析并验证。 第四章“基于双下肢仿生平台的验证”使用双下肢平台对控制算法进行验证,搭 建上位机平台,使用可视化界面完成对被控假肢的控制并采集双下肢仿生平台的返回 数据。 第五章“结论”对全文进行简要的总结,提出本课题研究的重点、难点和创新点, 并提出对进一步工作的计划和安排。 -7- 万方数据
河北工业大学硕士学位论文 - 7 - 1.4 课题主要研究内容 第一章“绪论”介绍课题研究的背景和意义,对国内外假肢的发展现状做简要介 绍,在对下肢假肢控制方法研究的基础上,提出基于中枢模式发生器的下肢假肢仿生 控制方法。 第二章“下肢运动信号的采集与分析”对人体下肢的膝关节运动信息进行采集分 析,对上斜坡、下斜坡、上楼梯、下楼梯和平地行走等常见的五种路况的步态进行分 析,为进一步的 CPG 振荡器网络的搭建提供数据基础。 第三章“基于 CPG 仿生控制方法研究”介绍 CPG 网络的基本构成振荡器,对振 荡器的基本特性进行分析并加以改进,用若干自适应的非线性振荡器组成 CPG 网络 并对网络进行学习训练,从而得到振荡器网络在特定步态下的网络参数,使用 Matlab 进行仿真分析并验证。 第四章“基于双下肢仿生平台的验证”使用双下肢平台对控制算法进行验证,搭 建上位机平台,使用可视化界面完成对被控假肢的控制并采集双下肢仿生平台的返回 数据。 第五章“结论”对全文进行简要的总结,提出本课题研究的重点、难点和创新点, 并提出对进一步工作的计划和安排。 万方数据

自适应性主动式下肢假肢仿生控制方法研究 -8- 万方数据
自适应性主动式下肢假肢仿生控制方法研究 - 8 - 万方数据